Результат интеллектуальной деятельности: Способ формирования сигнала управления боковым движением нестационарного беспилотного летательного аппарата с адаптивно-функциональной коррекцией и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к устройствам многофакторного управления для бортовых систем автоматического управления беспилотными летательными аппаратами, в частности и в особенности при ограниченном до минимума числа рулей - до двух.
Известны способы формирования сигнала и устройства управления для систем управления боковым движением беспилотного летательного аппарата (БЛА), в которых каналы управления креном и курсом содержат элементы вычитания и суммирующие усилители, формирующие по задающим воздействиям и сигналам датчиков состояния управляющие воздействия на исполнительные приводы летательного аппарата [1].
Недостатком такой реализации являются ограниченность возможностей управления и невысокая статическая и динамическая точность.
Наиболее близким к предлагаемому изобретению – прототипом - является способ и устройство управления летательным аппаратом [2].
Известный способ включает в себя задание угла курса, измерение текущего значения сигнала угла курса, формирование сигнала рассогласования по курсу посредством вычитания из текущего значения сигнала угла курса заданного значения, ограничение сигнала управляющего воздействия по крену, измерение текущего значения сигнала угла крена, формирование сигнала рассогласования по крену посредством вычитания из текущего значения сигнала угла крена ограниченного сигнала управляющего воздействия по крену, измерение сигнала угловой скорости по курсу, измерение сигнала угловой скорости по крену, формирование выходного сигнала управления устройства посредством ограничения базового сигнала управления по крену.
Известное устройство содержит последовательно соединенные задатчик угла курса и первый блок вычитания, второй вход которого соединен с выходом датчика угла курса, последовательно соединенные первый ограничитель сигнала и второй блок вычитания, второй вход которого соединен с выходом датчика угла крена, датчик угловой скорости по курсу, датчик угловой скорости по крену и второй ограничитель сигнала, выход которого является выходом устройства управления.
Недостатками известных способа и устройства являются ограниченные функциональные возможности в условиях широкого высотно-скоростного диапазона траекторий полета и невысокая статическая и динамическая точность управления.
Техническим результатом предложенного решения являются расширение функциональных возможностей при полете в широком высотно-скоростном диапазоне траекторий, повышение статической и динамической точности, а также увеличение интенсивности управления с точки зрения маневренности ЛА.
Указанный технический результат достигается тем, что в известный способ, включающий в себя задание угла курса, измерение сигнала угла курса, формирование сигнала рассогласования по курсу посредством вычитания из сигнала угла курса заданного значения, ограничение сигнала управляющего воздействия по крену, измерение сигнала угла крена, формирование сигнала рассогласования по крену посредством вычитания из сигнала угла крена ограниченного сигнала координированного управляющего воздействия по крену, измерение сигнала угловой скорости по курсу, измерение сигнала угловой скорости по крену, формирование выходного сигнала управления устройства посредством ограничения базового сигнала управления по крену, дополнительно включены измерение сигнала скоростного напора адаптивное, в функции от сигнала скоростного напора, усиление сигналов рассогласования по курсу и угловой скорости по курсу и суммирование полученных сигналов, адаптивное, в функции от скоростного напора, инвертирующее корректирующее усиление сигнала рассогласования по курсу, адаптивное, в функции от скоростного напора, инвертирующее масштабирование суммарного сигнала, формирование задающего значения координирующего сигнала управления по крену посредством адаптивного, в функции от скоростного напора, ограничения инвертированного масштабированного сигнала, формирование корректирующей компоненты по крену посредством ограничения адаптивно скорректированного инвертированного с усилением сигнала рассогласования по крену, адаптивное, в функции от сигнала скоростного напора, формирование базового сигнала управления по крену адаптивным усилением сигналов рассогласования по крену и угловой скорости по крену и суммированием усиленных сигналов.
Указанный технический результат достигается также и тем, что в известное устройство, содержащее последовательно соединенные задатчик угла курса и первый блок вычитания, второй вход которого соединен с выходом датчика угла курса, последовательно соединенные первый ограничитель сигнала и второй блок вычитания, второй вход которого соединен с выходом датчика угла крена, датчик угловой скорости по курсу, датчик угловой скорости по крену и второй ограничитель сигнала, выход которого является выходом устройства, дополнительно введены последовательно соединенные датчик скоростного напора и первый адаптивный суммирующий усилитель, второй вход которого соединен с выходом первого блока вычитания, последовательно соединенные адаптивный корректирующий инвертирующий усилитель, первый вход которого соединен с выходом первого блока вычитания, второй - с выходом датчика скоростного напора, адаптивный ограничитель сигнала, второй вход которого соединен с выходом датчика скоростного напора, и второй адаптивный суммирующий усилитель, второй вход которого соединен с выходом датчика скоростного напора, третий вход - с выходом второго блока вычитания, четвертый - с выходом датчика угловой скорости по крену, а выход соединен со входом второго ограничителя сигнала, и инвертирующий масштабный усилитель, вход которого соединен выходом первого адаптивного суммирующего усилителя, а выход соединен со входом первого ограничителя сигнала.
Действительно, при этом обеспечивается отработка угла курса посредством маневров БЛА по крену с участием и функциональной избирательностью и с доопределением основных режимов режимами форсирующего сигнала, адаптации и функциональных ограничений сигналов при многофакторных условиях полета.
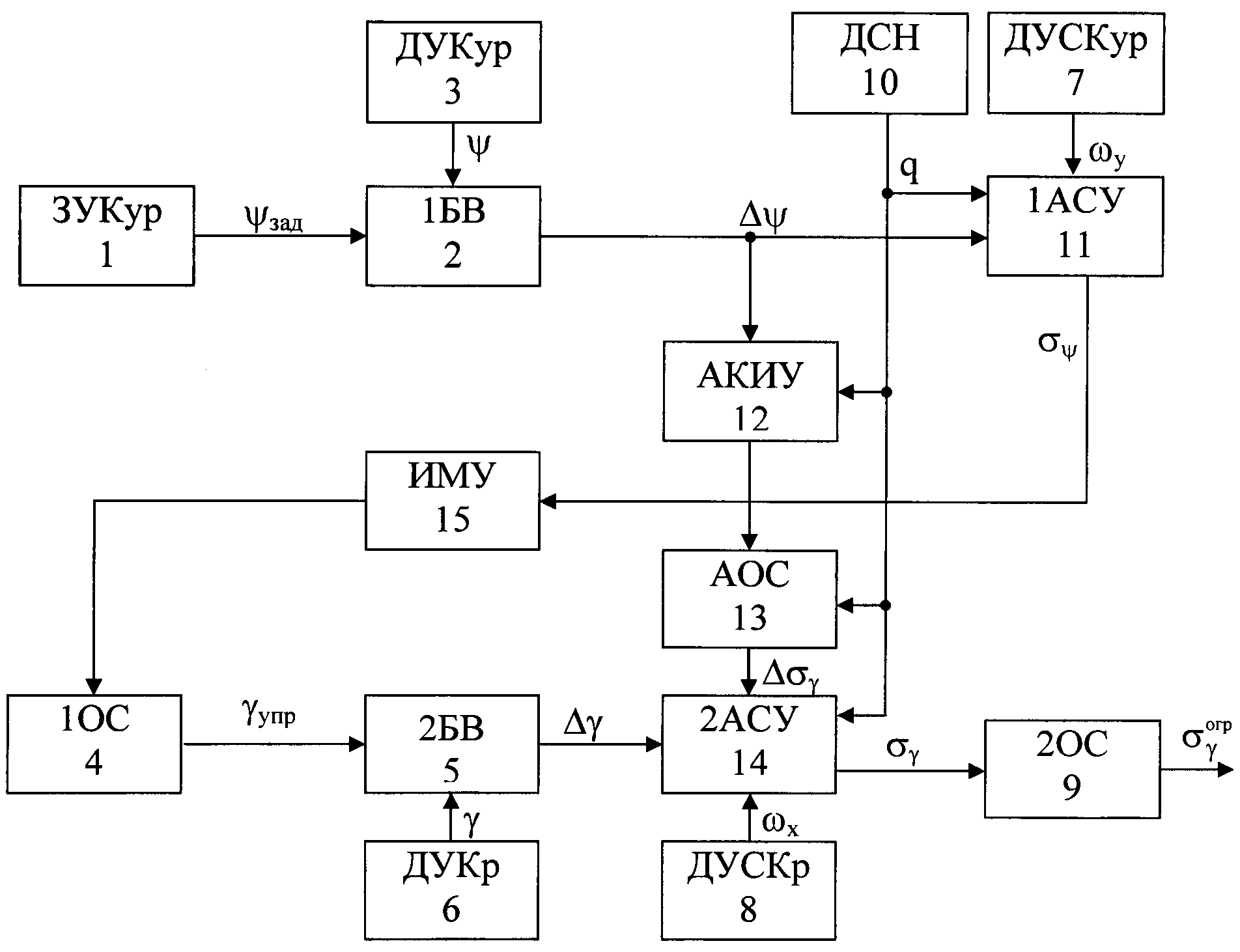
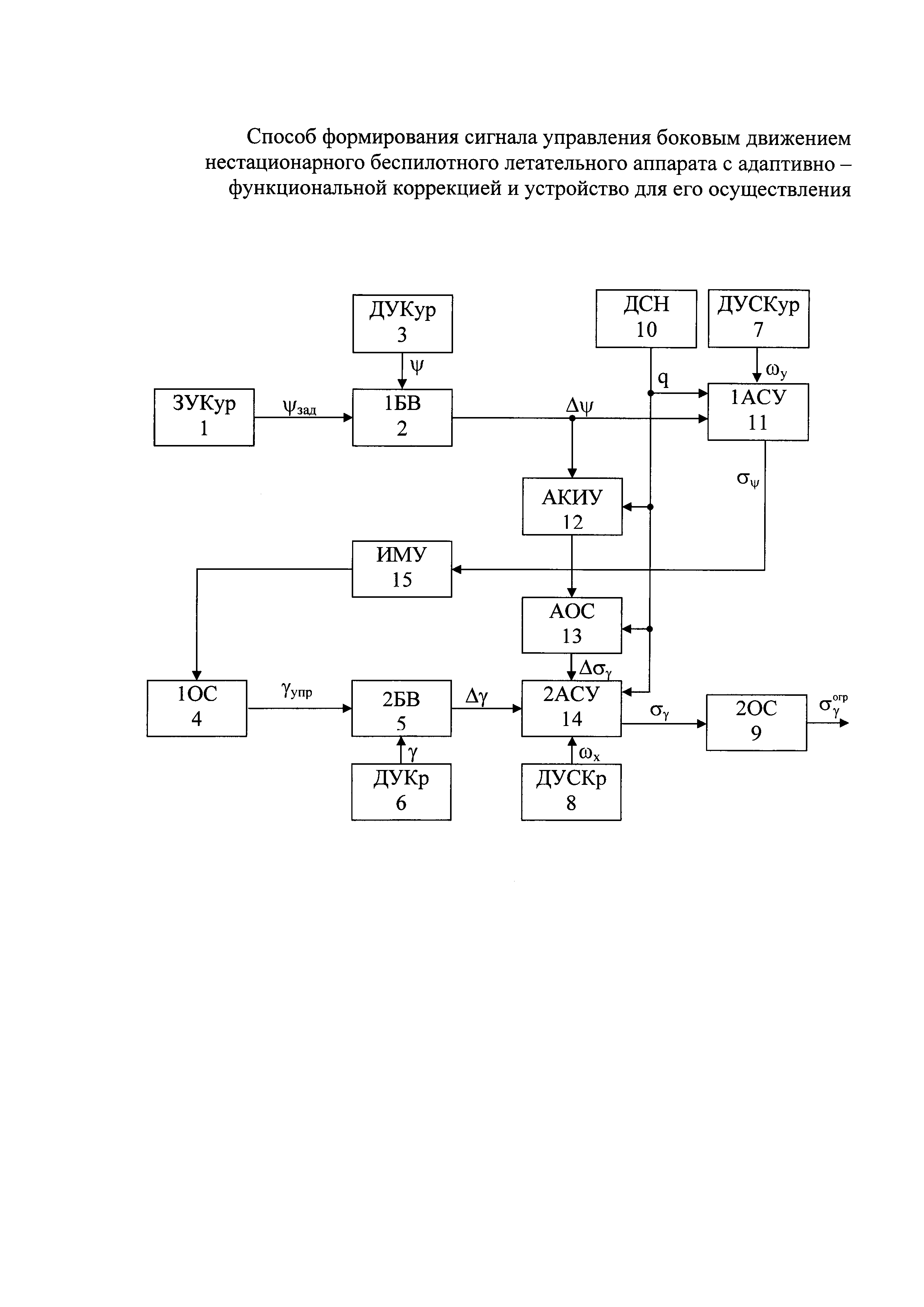
На чертеже представлена блок схема устройства формирования сигнала управления боковым движением БЛА с адаптивно-функциональной коррекцией.
Устройство управления БЛА с реализацией способа содержит последовательно соединенные задатчик угла курса 1 (ЗУКур) и первый блок вычитания 2 (1БВ), второй вход которого соединен с выходом датчика угла курса 3 (ДУКур), последовательно соединенные первый ограничитель сигнала 4 (1OС) и второй блок вычитания 5 (2БВ), второй вход которого соединен с выходом датчика угла крена 6 (ДУКр), датчик угловой скорости по курсу 7 (ДУСКур), датчик угловой скорости по крену 8 (ДУСКр) и второй ограничитель сигнала 9 (2OС), выход которого является выходом устройства, последовательно соединенные датчик скоростного напора 10 (ДСН) и первый адаптивный суммирующий усилитель 11 (1АСУ), второй вход которого соединен с выходом первого блока вычитания 2, последовательно соединенные адаптивный корректирующий инвертирующий усилитель 12 (АКИУ), первый вход которого соединен с выходом первого блока вычитания 2, второй - с выходом датчика скоростного напора 10, адаптивный ограничитель сигнала 13(АОС), второй вход которого соединен с выходом датчика скоростного напора 10, и второй адаптивный суммирующий усилитель 14 (2АСУ), второй вход которого соединен с выходом датчика скоростного напора, третий вход - с выходом второго блока вычитания 5, четвертый - с выходом датчика угловой скорости по крену 8, а выход соединен со входом второго ограничителя сигнала 9, и инвертирующий масштабный усилитель 15 (ИМУ), вход которого соединен выходом первого адаптивного суммирующего усилителя 11, а выход соединен со входом первого ограничителя сигнала 4.
Устройство управления с реализацией Способа работает следующим образом.
Блоки 1, 2, 3, 7, 11 со связями образуют основной канал управления по курсу; блоки 4, 5, 6, 8, 14, 9 со связями образуют основной канал управления по крену; блок 15 со связями - канал перекрестной координирующей связи; блоки 12, 13, 14 со связями формируют дополнительную, форсирующую компоненту сигнала управления для канала крена; датчик скоростного напора 10 со связями формирует каналы и режимы адаптации; блоки 4, 9, 13 осуществляют ограничение сигналов.
В целом, канал управления с формированием выходного сигнала устройства  включает в себя соединенные каналы курса, крена и перекрестную координирующую связь. Сигналы формируются блоками 4, 5, 6, 7, 11 канала курса, 1, 2, 3, 8, 9, 10 канала крена:
включает в себя соединенные каналы курса, крена и перекрестную координирующую связь. Сигналы формируются блоками 4, 5, 6, 7, 11 канала курса, 1, 2, 3, 8, 9, 10 канала крена:




где K1ψ, К2ψ - адаптивные передаточные коэффициенты первого усилителя 11, адаптивно перестраиваемые в функции от сигнала скоростного напора q, получаемого от датчика скоростного напора 10;
Δψ - сигнал рассогласования по курсу на выходе первого блока вычитания 2;
ψ - сигнал датчика угла курса 3;
ψзад - задающий сигнал по курсу на выходе задатчика сигнала управления по курсу 1;
ωу- сигнал датчика угловой скорости по курсу 7;
K1γ, К2γ - адаптивные передаточные коэффициенты второго усилителя 14;
Δγ - сигнал рассогласования по крену на выходе второго блока вычитания 5;
γ - сигнал датчика угла крена 6;
γупр - управляющий сигнал по крену на выходе звена с ограничением 4;
ωх - сигнал датчика угловой скорости по крену 8.
Сигнал γупр формируется специальным каналом координированного управления, подключенным входом по сигналу σψ к выходу второго суммирующего усилителя 11, а выходом - ко входу ограничителя 4 через инвертирующий масштабный усилитель 15.
Устройство управления работает в режимах стабилизации и управления задающих сигналов ψзад через основной канал, сочетающий соединенные каналы курса и крена, и дополнительный (второй) корректирующий канал, формирующий дополнительную компоненту Δσγ в непосредственной функции от сигнала Δψ.
Для этого в основной сигнал управления по крену по (2) добавляется компонента Δσγ, т.е.

При отработке сигналов ψзад канал курса формирует сигнал σψ, канал крена - в режиме координированного управления с отработкой сигнала γупр с ограничением сигнала σγ в блоке 9, сигнал с выхода которого является выходным сигналом устройства. Инвертирование в усилителях 15 и 12 реализует принцип координированного управления и оптимальное значение степени усиления. Ограничитель сигнала 9 обеспечивает выполнение функции ограничения координированного сигнала управления для подачи на рулевой привод летательного аппарата.
Все блоки устройства управления являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники, например, по [3, 4].
Таким образом, предложенное техническое решение позволяет расширить функциональные возможности устройства в условиях изменения задающих воздействий в широких пределах, существенно расширить высотно-скоростной диапазон траекторий полета БЛА и повысить статическую и динамическую точность управления.
Источники информации
1. И.А. Михалев и др. Системы автоматического управления самолетом. - М.: Машиностроение, 1987 г., с. 174.
2. Патент РФ №2532720 от 10.09.2014 г.
3. В.Б. Смолов. Функциональные преобразователи информации. - Л.: Энергоиздат, Ленинградское отделение, 1981, с. 22, 41.
4. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. - М.: Машиностроение, 1981, с. 107, 126.
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой
Способ управления системой терморегулирования радиационных панелей космического аппарата при сбоях и отказах датчиков температур
Способ формирования сигнала управления угловым движением беспилотного летательного аппарата при широком спектре возмущающих воздействий и система управления для его осуществления
Способ парирования перегрузок по току в электронном блоке космического аппарата, обусловленных внешними воздействующими факторами, включая тиристорный эффект, и устройство для его осуществления
Способ формирования сигнала угловой стабилизации по крену летательного аппарата с оценкой и компенсацией внешнего возмущения и устройство для его осуществления
Способ формирования нелинейного адаптивного цифроаналогового сигнала стабилизации углового положения беспилотного летательного аппарата и система стабилизации для его осуществления
Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата
Способ управления пространственной ориентацией космического аппарата и система управления для его реализации
Радиоэлектронный блок
Устройство отвода тепла
Матричное устройство выдачи команд с оптической развязкой

