Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ В ПОЛЕТЕ ИЗГИБНЫХ НАПРЯЖЕНИЙ НА ВАЛУ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА С ТОРСИОННОЙ ВТУЛКОЙ НЕСУЩЕГО ВИНТА
Вид РИД
Изобретение
Изобретение относится к области авиации, в частности к системам мониторинга технического состояния летательных аппаратов, а именно мониторинга уровня изгибных напряжений вала несущего винта вертолета в полете, в частности для легкого многоцелевого вертолета с бесшарнирным креплением лопастей, например вертолетов: АНСАТ, ВК-117, ЕС-145.
Трансмиссия является наиболее сложным элементом конструкции вертолета. Известно, что наибольший процент катастроф вертолетов (до 39%) по статистике связан именно с отказом агрегатов трансмиссии вертолета.
На этапе разработки систем мониторинга наиболее важным является определение и установление диагностических признаков технического состояния агрегатов трансмиссии вертолета. Главная задача при разработке системы мониторинга - установление пороговых значений диагностических признаков, при достижении которых в эксплуатации должны быть приняты соответствующие решения о дальнейшей безопасности полетов. Если какой-либо диагностический признак достиг своего порогового значения, то далее принимается решение об ограничении ресурса, о внеочередной замене какой-либо детали, или об отстранении агрегата трансмиссии от эксплуатации. Как правило, подавляющее большинство диагностических признаков не выводятся на индикацию в кабине пилотов во время совершения полета. Их анализ проводится после завершения полета. Однако некоторые особо ответственные диагностические признаки могут выводиться на индикацию в процессе полета, если того требуют условия безопасности.
В последние десятилетия на перспективных вертолетах стали применяться так называемые бесшарнирные несущие винты, оснащенные бесшарнирной втулкой, в которой функции горизонтального, вертикального и осевого шарниров выполняет упругий элемент протяженного типа - торсион. Основной частью конструкции торсиона является упруго-деформируемый участок. Наличие переклейки слоев и прорезей обеспечивает ручьям торсиона нагружение преимущественно в одноосном напряженно-деформированном состоянии с поперечным сдвигом и изгибом при качании лопасти в плоскости вращения. Это позволяет снизить стоимость эксплуатации вертолета, но при этом увеличиваются начальные затраты на проектирование и изготовление таких конструкций. Поэтому точность прогнозирования нагружения и, соответственно, оценки ресурса несущей системы вертолета является на сегодняшний день одной из ключевых задач вертолетостроения.
Вал несущего винта нагружается силами и моментами от его втулки и крутящим моментом, создаваемым на выходе главного редуктора. Длина вала несущего винта определяется компоновочными, аэродинамическими и эксплуатационными соображениями.
Поскольку полужесткая втулка имеет больший изгибающий момент по сравнению с шарнирной, контроль изгибных напряжений вала несущего винта вертолета с бесшарнирной втулкой в полете является актуальной задачей.
Известна система мониторинга нагружения вала несущего винта (патент США №2010219987, SIKORSKY AIRCRAFT, дата публикации 02.09.2010, МПК G06F 15/00, G08B 21/00).
Способ виртуального контроля нагрузки на систему несущего винта вертолета в соответствии с одним из вариантов осуществления настоящего изобретения включает в себя отбор, по меньшей мере, одного параметра летательного аппарата за один полный оборот несущего винта. Расчет коэффициентов для получения совокупности высокочастотных сигналов от параметра, по меньшей мере, одного летательного аппарата. Умножение каждого из множества высокочастотных сигналов на коэффициент для получения совокупности проанализированных сигналов. Оценка нагрузки на несущий винт на основе проанализированных сигналов.
Система определения состояния несущего винта в режиме реального времени в соответствии с одним из вариантов осуществления настоящего изобретения включает в себя систему датчиков, предназначенную для измерения нагрузок для получения данных. Модуль выполнен с возможностью виртуального контроля нагрузок для получения расчетных данных и обнаружения неисправностей в режиме реального времени и получения алгоритма вычитания расчетных сигналов из измеренных сигналов для получения значений, которые затем сравниваются со стандартными значениями, чтобы выдать окончательный результат о состоянии несущего винта.
Датчики считывают такие параметры, как взлетная масса летательного аппарата, высота по плотности, скорость вращения несущего винта, скорость воздушного потока, нормальное ускорение, вертикальная скорость набора высоты, крутящий момент двигателя, угол тангажа, угол крена, угловая скорость рыскания, угловая скорость по тангажу, угловая скорость крена, отклонение в продольном направлении, поперечное положение, положение педали и совокупность позиций за один оборот несущего винта. Вектора заданных шестнадцати параметров умножаются на заданные значения матрицы, включающей в себя 10 строк и 16 столбцов, для получения десяти коэффициентов (c1, с2, с3, с4, с5, с6, с7, с8, с9, и с10) для определения десяти значений колебаний. Значения колебаний умножаются на коэффициент для получения усиленных колебаний. Если вектора колебаний обозначить как w1, w2, w3, w4, w5, w6, w7, w8, w9, и w10, а коэффициенты - c1, c2, c3, c4, c5, с6, c7, c8, c9, и с10, то расчетный сигнал усилия сдвига вала несущего винта запишется в виде:
L=c1*w1+c2*w2+c3*w3+c4*w4+c5*w5+c6*w6+c7*w7+c8*w8+c9*w9+c10*w10
Амплитуда и фаза усилия сдвига рассчитываются через преобразование Фурье.
Известна система сбора данных, контроля и диагностики технического состояния агрегатов привода винтов вертолета (патент РФ на изобретение №2519583, опубл. 27.02.2014 г., МПК B64D 45/00), включающая пьезоэлектрические датчики вибрации, которые установлены на корпусе, по меньшей мере, одного из агрегатов привода винтов вертолета и расположены так, что получают данные с полнотой, достаточной для диагностики технического состояния деталей, узлов, по меньшей мере, одного агрегата привода винтов работающего вертолета, и бортовой электронный блок. Электронный блок связан с выходами датчиков вибраций и выполнен с возможностью цифровой обработки вибросигналов, управления и осуществления сбора, первичной обработки и оценки параметров сигналов отдельных датчиков и/или их комбинаций, накопления данных датчиков и сохранения их на внешних и/или съемных носителях, пригодных для считывания компьютером, и вторичной обработки в наземных условиях. Повышается эффективность сбора данных, информативность контроля и диагностики технического состояния агрегатов привода винтов работающего вертолета.
Недостатком данной системы контроля является невозможность по измеренным в полете вибрациям сделать однозначный вывод об уровне усталостных напряжений в агрегатах вертолета, в том числе и в вале несущего винта. Также недостатком является необходимость установки на вертолетах датчиков и электронных блоков, затраты времени для вторичной обработки данных в наземных условиях.
Известен способ эксплуатации вертолета (патент РФ №2543111, опубл. 27.02.2015, МПК В64С 27/04, B64F 5/00, G01L 3/24), заключающийся в том, что при каждом полете осуществляют контроль фактической тяги несущего винта вертолета, причем предварительно перед началом эксплуатации вертолета осуществляют сбор исходных данных по характеристикам двигателей силовой установки в соответствии с формулярами и сбор исходных данных по величине тяги несущего винта при контрольных висениях вертолета. В течение всего времени эксплуатации вертолета осуществляют сбор и фиксацию фактических данных по величине тяги несущего винта на режимах висения вертолета, сравнивают с помощью бортового вычислителя полученные статистические данные по тяге несущего винта с исходными величинами и, в случае снижения величины тяги несущего винта от исходной на заданную величину, формируют с помощью бортового вычислителя сигнал на монитор о необходимости регулировки параметров двигателей до значений, обеспечивающих отклонение тяги несущего винта в пределах 0,5% от исходной величины. Регулирование параметров двигателя осуществляется или в автоматическом режиме, или обслуживающим персоналом на земле. Достигается повышение эффективности применения вертолета.
Недостатком данного способа эксплуатации является невозможность по полученным результатам определить уровень усталостных напряжений на валу несущего винта, потому что усталостные напряжения на нем определяются напряжениями изгиба. Также недостатком является необходимость установки на вертолетах датчиков и электронных блоков, затраты времени для вторичной обработки данных в наземных условиях. Также недостатком является необходимость предварительно перед началом эксплуатации вертолета осуществляют сбор исходных данных по характеристикам двигателей силовой установки в соответствии с формулярами и сбор исходных данных по величине тяги несущего винта при контрольных висениях вертолета.
В качестве ближайшего аналога выбран патент США №2011112806, опубл. 2011.05.12, МПК G06F 17/10. Изобретение относится к способу предоставления информации о критическом состоянии компонента винтокрылого летательного аппарата, включающего в себя, по меньшей мере, один двигатель, приводящий в движение несущий винт, включающий в себя обтекатель, вал и множество лопастей. Датчик измерения изгибающих и циклических нагрузок, действующих на несущий винт летательного аппарата, включает в себя вычислительный блок, предназначенный для вычисления (а) текущей температуры подшипника узла несущего винта с использованием первой расчетной модели, (б) прогнозирование температуры подшипника с использованием первой расчетной модели и (в) приложение нагрузки на выбранный компонент узла несущего винта с использованием второй расчетной модели, первая и вторая расчетные модели выполнены с возможностью расчета, соответственно, прогнозируемого и текущего значения температуры подшипника и нагрузки, действующей на выбранный компонент на основе контрольных параметров полета; и блок отображения, предназначенный для отображения на единой шкале подвижного индикатора, который приводится в движение под воздействием наибольшего значения проецируемой температуры подшипника и нагрузки, действующей на выбранный компонент. Дисплей отображает другой подвижный индикатор, приводимый в действие текущей температурой подшипника.
Недостатком прототипа является необходимость установки внештатных датчиков, что представляет собой определенные трудности, поскольку конструкция серийных вертолетов не приспособлена к установке внештатных датчиков, кроме того, в процедурах технического обслуживания и полевого ремонта внештатные датчики не интегрированы в полной мере с остальным авиационным оборудованием, требуют дополнительных руководств и справочников по технической эксплуатации и дополнительно обученных специалистов.
Задачей заявляемого технического решения является создание способа контроля изгибных напряжений на валу несущего винта в течение всего времени выполнения полета (от взлета до посадки) для выявления усталостных повреждений вала и для предотвращения аварийных ситуаций.
Технический результат - определение остаточного ресурса и контроль допустимого уровня нагрузок.
Технический результат достигается тем, что способ определения в полете изгибных напряжений на валу несущего винта вертолета с торсионной втулкой несущего винта включает измерение в течение всего времени полета штатными средствами контроля летно-технических характеристик вертолета, расчет с помощью математической модели нагрузок на вал несущего винта и сигнализирование в случае их превышения, из числа измеренных летно-технических характеристик выбирают и систематизируют значимые параметры, оказывающие непосредственное влияние на уровень нагруженности вала несущего винта, определяют аппроксимирующие функции значимых параметров с целью определения итоговой функции зависимости напряжений в вале несущего винта σ(t) от выбранных параметров летно-технических характеристик, к итоговой функции добавляются абсолютные значения скоростей изменения углов поворота тарелки автомата перекоса в продольном и поперечном направлении:

Предлагаемый способ позволяет оценивать уровень нагруженности вала несущего винта в любой момент его летной эксплуатации. Основанный на использовании штатных средств контроля параметров полета вертолета, он позволяет определять уровень изгибных напряжений в течение всего времени выполнения полета, использовать его для регистрации полетных ограничений и сообщения экипажу о превышении допустимого уровня нагрузок, а также определения остаточного ресурса.
В заявляемом изобретении сделан анализ условий обоснованного установления предельных значений для особо ответственных диагностических признаков на примере индикации фактических действующих в полете изгибных напряжений вала несущего винта вертолета одновинтовой схемы, в частности для вертолетов АНСАТ.
Сущность изобретения заключается в том, что из числа контролируемых в полете параметров выбирают и систематизируют те параметры, которые оказывают непосредственное влияние на уровень нагруженности вала НВ. Определяются аппроксимирующие функции значимых параметров с целью определения итоговой функции зависимости напряжений в вале НВ от выбранных параметров ЛТХ. К итоговой функции добавляются абсолютные значения скоростей изменения углов поворота тарелки автомата перекоса в продольном и поперечном направлении.
Проводят летный эксперимент. Выбор критичного параметра определяется из текущих значений летно-технических характеристик (ЛТХ) вертолета. Для этого на вал вертолета устанавливается тензодатчик и в реальном полете повременно фиксируются значения напряжений σист(t), а также значения траекторных параметров, измеряемых штатными средствами контроля параметров полета вертолета, например: продольный и поперечный угол наклона тарелки автомата перекоса, общий шаг несущего винта, скорость вертолета, угол тангажа вертолета, угол крена вертолета, темп изменения угла наклона тарелки автомата перекоса в продольном и поперечном направлении и др.
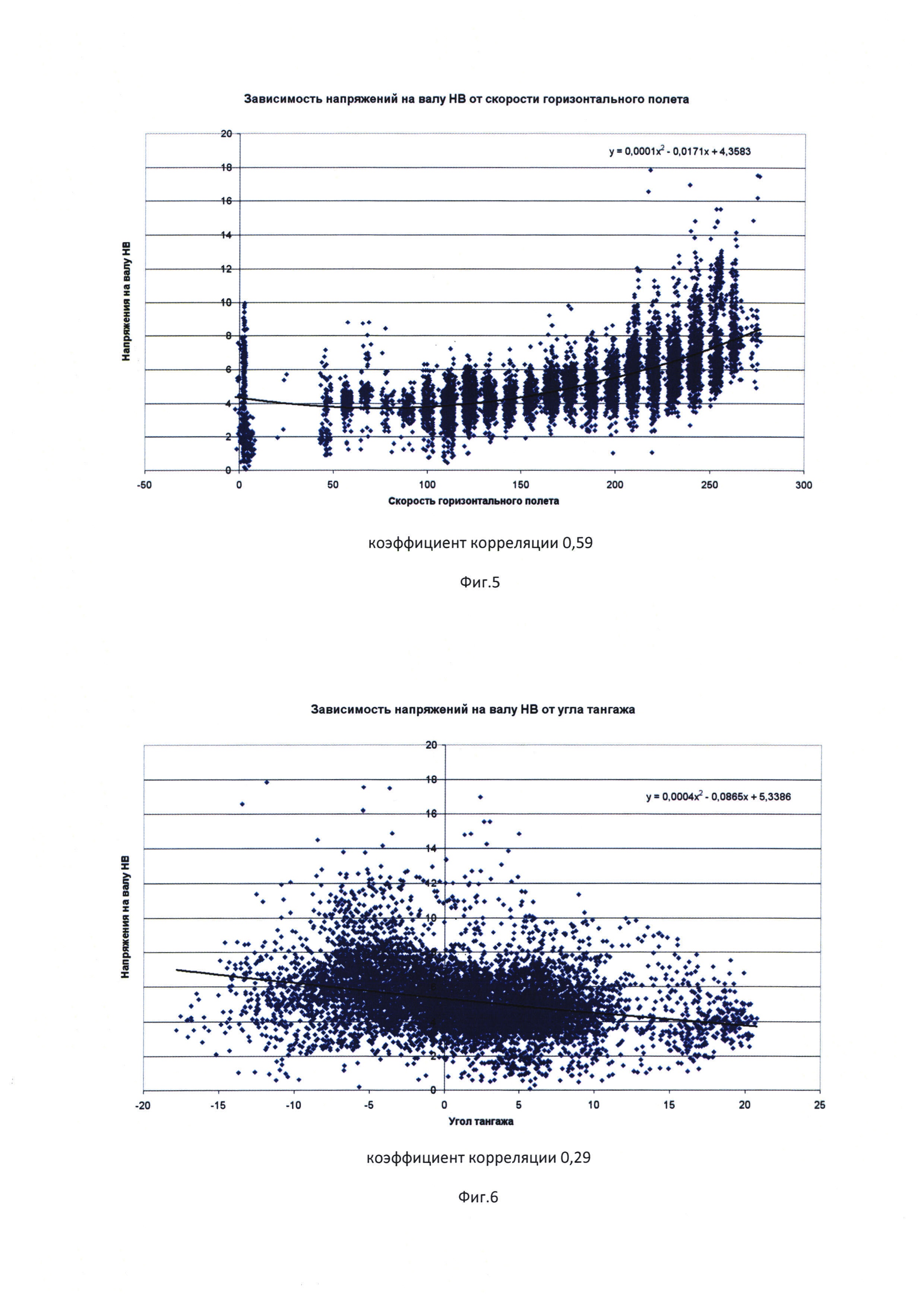
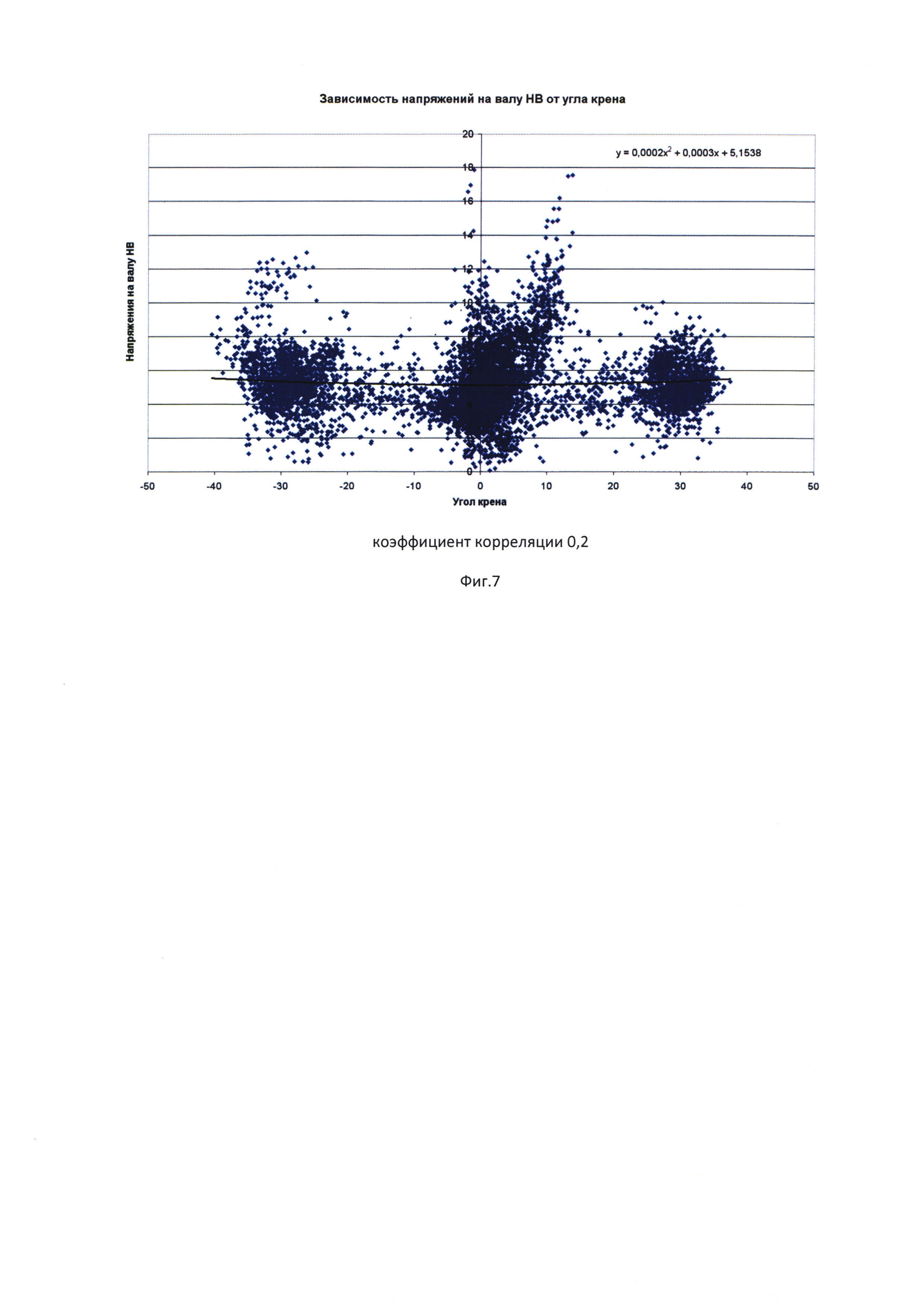
Предварительным анализом выбираются параметры ЛТХ, наиболее максимально влияющие на напряжения на валу НВ, для чего строятся графики изменения напряжения на валу в зависимости от значения параметров, регистрируемых штатными средствами контроля, и находят и оценивают коэффициенты корреляции с целью фильтрации параметров ЛТХ.
В качестве значимых выбирают траекторные параметры ЛТХ с коэффициентом корреляции более 0,2.
Строятся аппроксимирующие кривые (зависимости напряжений на валу несущего винта от выбранных параметров ЛТХ) и составляется система уравнений с целью определения аппроксимации функции для изгибного напряжения по времени σрасч(t):

и находятся соответствующие весовые коэффициенты A1, А2, A3, …, An.
Коэффициенты A1, А2, A3 находят полиномиальной аппроксимацией по методу наименьших квадратов (для конкретного вертолета с конкретными ЛТХ).
Окончательная формула принимает вид:

где Dпрод - угол наклона тарелки автомата перекоса в продольном направлении,
Dпоп - угол наклона тарелки автомата перекоса в поперечном направлении,
Dош - общий шаг несущего винта,
Хn - иные значимые летно-технические параметры,
 - абсолютное значение скорости изменения угла поворота тарелки автомата перекоса в продольном направлении,
- абсолютное значение скорости изменения угла поворота тарелки автомата перекоса в продольном направлении,
 - абсолютное значение скорости изменения угла поворота тарелки автомата перекоса в поперечном направлении.
- абсолютное значение скорости изменения угла поворота тарелки автомата перекоса в поперечном направлении.
Расчет изгибного напряжения вала несущего винта вертолета осуществляется в режиме реального времени в течение всего времени полета в вычислительном блоке бортового компьютера на основании заложенной программы. При превышении безопасного уровня напряжений осуществляется сигнализирование летчику и начинается вычисление израсходованного ресурса в часах по формуле:

где Пр – повреждаемость, вносимая уровнем напряжений, превышающим безопасный;
Пт.п. - повреждаемость за час типового полета, принятая при расчете ресурса для нормальных условий эксплуатации.
Повреждаемость, вносимая уровнем напряжений, превышающим безопасный Пр, определяется по следующей методике:
- для каждого уровня нагружения, превышающего безопасный, с использованием кривой усталости (кривая принимается по результатам испытаний на усталость вала несущего винта) определяется соответствующее количество циклов до разрушения (Ni);
- повреждаемость, вносимая уровнем напряжений, превышающим безопасный Пр, определяется как отношение количества циклов на этом уровне к количеству циклов до разрушения (Ni).
Таким образом, после каждого полета вычисляется израсходованный ресурс вала несущего винта. В случае, если превышений предельного уровня нагружения не было, то израсходованный ресурс вала несущего винта равен фактическому времени полета, в случае, если были зафиксированы превышения безопасного уровня нагружения, то к фактическому времени полета добавляется время, определенное по описанной выше методике.
Поскольку всегда имеет место процедура измерения, необходимая для получения достоверной информации для каждого диагностического признака, то, соответственно, также требуется учет неизбежных погрешностей измерения для каждого диагностического признака. Тогда принятие решения о превышении или о непревышении его предельных значений должно приниматься также с учетом верхнего (или нижнего) допуска области предельных состояний.
Должна быть установлена некоторая предельная величина σПР, превышение которой влечет за собой быстрое исчерпание усталостной долговечности вала несущего винта и возможное его разрушение в последующем времени полета. Поскольку данный параметр, или диагностический признак, является особо ответственным, то необходима индикация в кабине пилотов его текущего значения. Обозначим как  - допустимое по индикатору значение текущего измеренного значения σф.
- допустимое по индикатору значение текущего измеренного значения σф.
Фактическое текущее значение σф можно представить в виде суммы:

где mσ - математическое ожидание изгибных напряжений в наиболее нагруженном сечении вала несущего винта на рассматриваемом режиме полета, Δσ - отклонение фактического значения σф от его математического ожидания.
Описание осуществления изобретения
Практическое определение параметров, влияющих на уровень нагруженности вала.
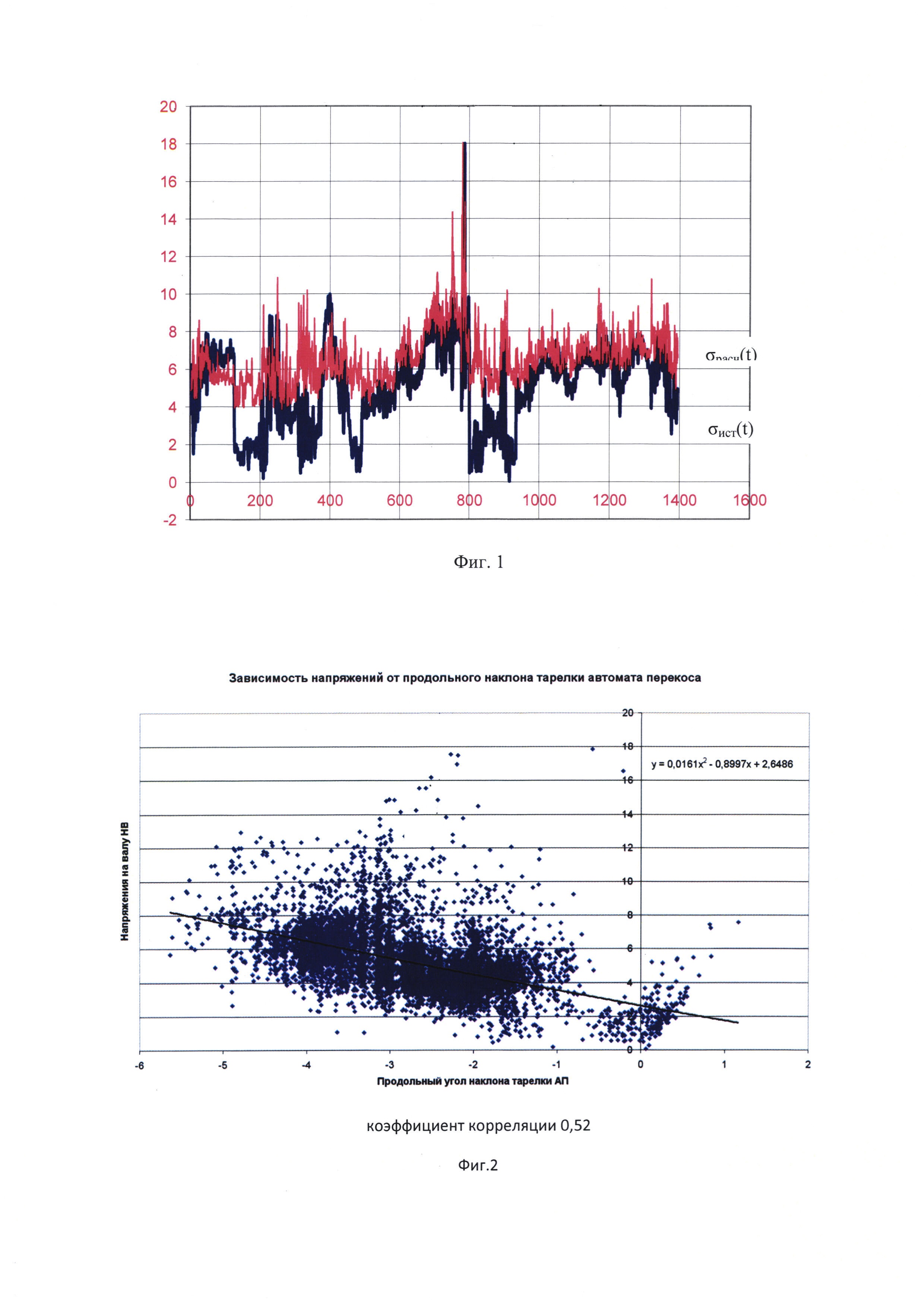
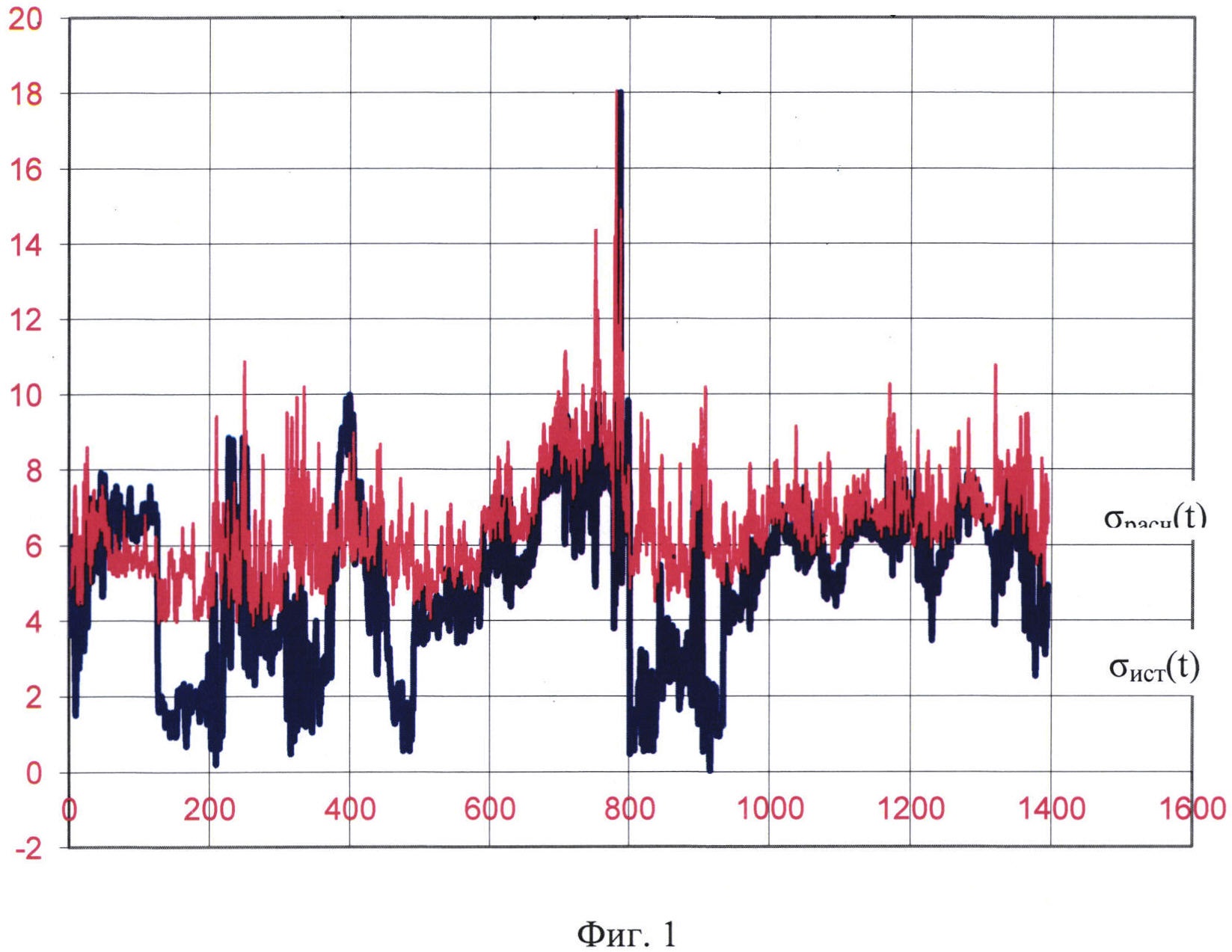
1. Проводился летный эксперимент на вертолете с одновинтовой схемой АНСАТ, в ходе которого измерялись значения изгибных нагрузок в конкретный отрезок времени с помощью тензодатчика, установленного на валу несущего винта. Экспериментальная зависимость σист(t) приведена на фиг. 1 (кривая 1). Данная зависимость получена на типовом режиме полета, включающего следующие режимы:
а) Висение (в том числе развороты на висении)
б) Разгон
в) Малые скорости у земли
г) Набор высоты
д) Горизонтальный полет с разными скоростями
е) Виражи
ж) Моторное планирование
з) Торможение
В течение полета с помощью штатных средств контроля вертолета были измерены во времени следующие траекторные параметры.
1. Скорость, единица измерения км/ч.
Измерялась прибором «Указатель скорости УСВИЦ-350 с цифровым выходом». Погрешность выдачи цифрового сигнала текущей приборной скорости в нормальных климатических условиях при номинальных значениях входных сигналов не превышает ±6 км/ч.
2. Высота, единица измерения м.
Измерялась приборами:
- «Указатель высоты ВМЦ-10» - высотомер механический с цифровым выходом. Погрешность выдачи цифрового сигнала относительной высоты полета, вариация показаний при установленном на счетчике атмосферном давлении 760 мм рт.ст. (1013 гПа) в нормальных климатических условиях в зависимости от высоты составляет: от ±10 м (на высоте Ом) до ±30 м (на высоте 6000 м);
- «Радиовысотомер А-053-05.02» - бортовая радиолокационная станция с непрерывным излучением частотно-модулированных радиоволн. Погрешность измерения высоты при полетах над любой гладкой поверхностью (типа ВПП) с горизонтальной скоростью до 120 м/с и вертикальной скоростью не более 8 м/с при углах крена и тангажа до ±20° в диапазоне высот от 0 до 1500 м в 95% измерений высоты, м: по цифровому выходу 0,45 или ±0,02Н (что больше).
3. Угол крена и угол тангажа вертолета, градус.
Измеряется прибором «Авиагоризонт АГБ-96Д» - выдает сигналы крена и тангажа вертолета. Погрешность авиагоризонта по крену и тангажу на вибрирующем основании - не более ±2,5°.
4. Положение органов управления, единица измерения градусы.
Измеряется прибором «Потенциометрические двухканальные датчики положения органов управления ДП-М». Погрешность измерения ±30'.
5. Положение выходных звеньев (штоков) рулевых приводов (углы наклона тарелки автомата перекоса в продольном и поперечном направлении) РП-14, мм.
Измеряется прибором «Потенциометрические датчики МУ-615А серии 1». Погрешность измерения углов в нормальных условиях: ±2% от номинального диапазона измерения.
6. Угловые скорости, рад/с.
Измеряется прибором «Блок датчиков первичной информации БДПИ-09» - выдает информацию о проекциях векторов угловой скорости и линейного ускорения.
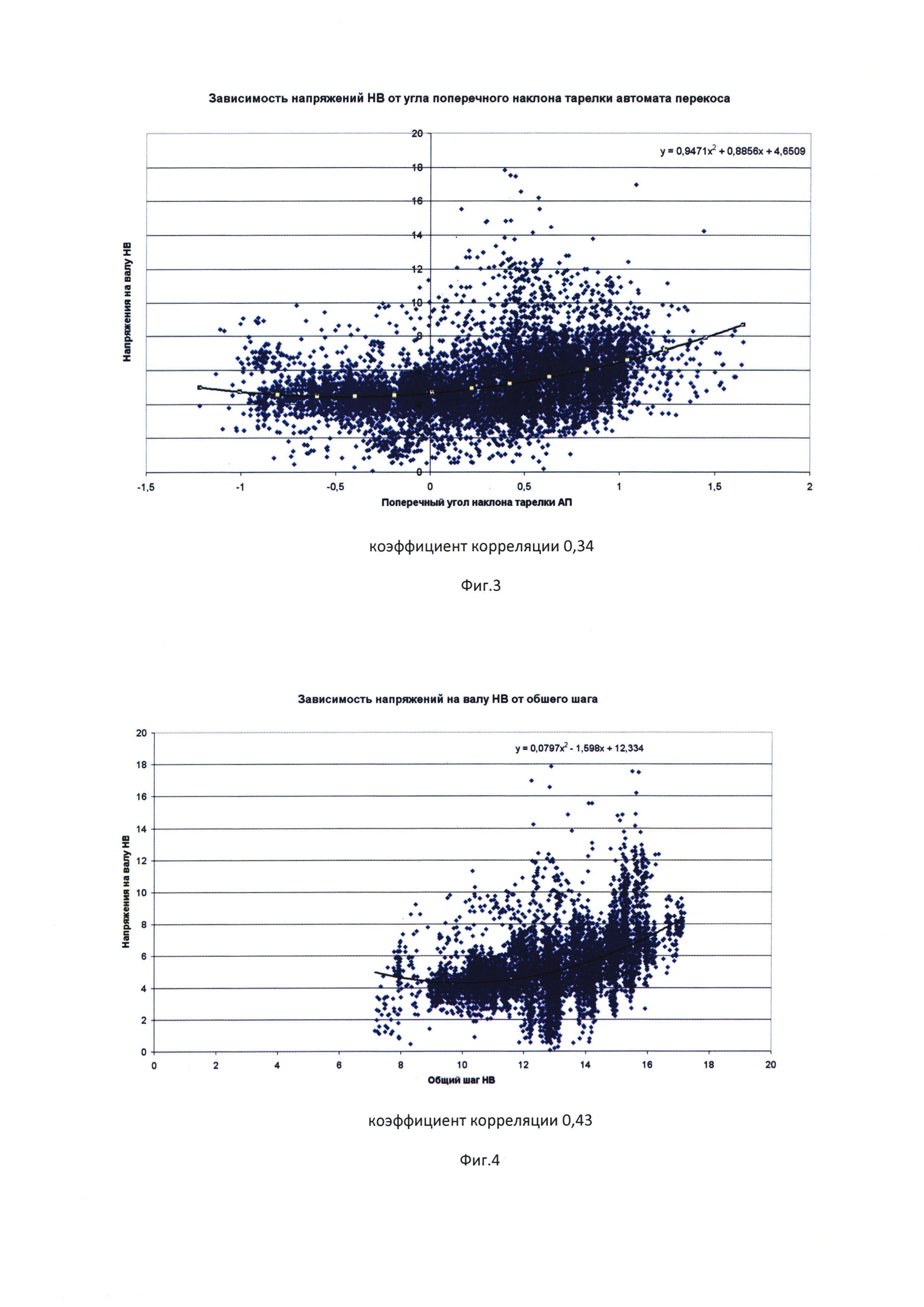
На фигурах 2-7 приведены зависимости напряжений на валу несущего винта от измеренных параметров. Перечень приведенных параметров не ограничен приведенными параметрами и зависит от конкретного вертолета.
В ходе эксперимента были измерены следующие параметры во времени:
σ(t) - величина изгибного напряжения по времени, измеренная тензометрическим датчиком на валу,
Dпрод(t) - угол наклона тарелки автомата перекоса в продольном направлении,
Dпоп(t) - угол наклона тарелки автомата перекоса в поперечном направлении,
Dош(t) - общий шаг несущего винта,
V(t) - скорость вертолета,
fт(t) - угол тангажа вертолета,
fк(t) - угол крена вертолета.
Определены коэффициенты корреляции для каждого параметра
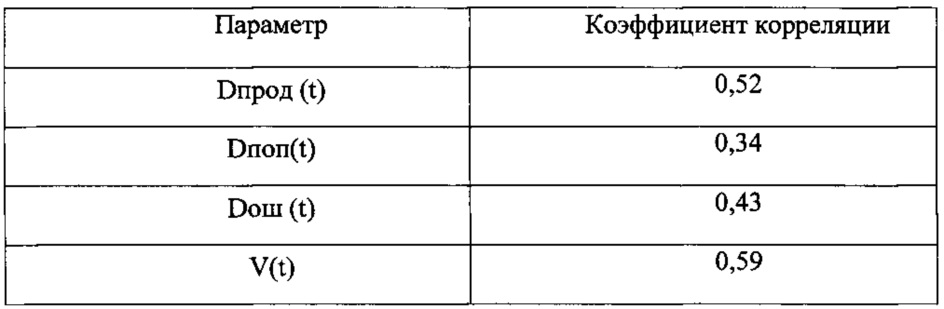

Все параметры (коэффициент корреляции >0,2) выбраны значимыми и для них построены аппроксимирующие кривые и составлены уравнения для каждого момента времени и для каждого параметра:






Согласно выбранным значимым параметрам окончательная формула принимает вид:

Коэффициенты A1, А2, A3, А4, А5, А6 найдены путем решения матричного уравнения:
А1=0,105864
А2=1,02273
A3=0,06855
А4=1,86659
А5=0,17941
А6=0,472461
Расчетные значения изгибного напряжения приведены на фигуре 1 (кривая σрасч(t)).
Предлагаемый способ позволяет оценивать уровень нагруженности вала НВ в любой момент его летной эксплуатации. Основанный на использовании штатных средств контроля параметров полета вертолета, он позволяет определять уровень изгибных напряжений в течение всего времени выполнения полета, использовать его для регистрации полетных ограничений и сообщения экипажу о превышении допустимого уровня нагрузок, а также определения остаточного ресурса.

Способ проведения усталостных испытаний тонкостенных конструкций
Способ сборки подвески дополнительных подвесных топливных баков на вертолете
Способ проведения усталостных испытаний тонкостенных конструкций
Способ сборки подвески дополнительных подвесных топливных баков на вертолете
Способ посадки вертолёта в режиме авторотации

