Результат интеллектуальной деятельности: Способ и система определения координат цели в системе запрос-ответ
Вид РИД
Изобретение
Изобретение относится к области радиолокации и может быть использовано в системах вторичной радиолокации, преимущественно имеющих в своем составе антенну, раскрыв которой образован одномерной линейкой излучателей, при определении координат цели в системе запрос-ответ.
Из уровня техники известны различные способы определения координат цели. Одним из способов является обзор окружающего пространства лучом радиолокатора, имеющим форму иглы, фиксация отраженных сигналов и определение координат цели по факту наличия отраженного сигнала как текущего направления луча в пространстве и дальности до цели, пропорциональной задержке прихода отраженного от цели сигнала. Недостатком этого способа является сложность антенной системы, формирующей луч радиолокатора в форме иглы, и большая мощность передатчика радиолокатора, так как способ относится к системам первичной (пассивной) радиолокации.
Другим способом является определение координат самой целью с помощью оборудования цели и передача координат запрашивающему объекту. Недостатком этого способа является низкая помехоустойчивость системы запросчик-ответчик.
Наиболее близким к предлагаемому техническому решению является изобретение «Способ и система для определения координат цели в системе запрос-ответ» (патент US №6,933,879, опубл. 23.08.2005 г., МПК: G01S 13/78, G01S 13/75, G01S 13/06), которое выбрано в качестве прототипа. Для определения координат цели используют следующие параметры: высота цели, сообщаемая целью, высота носителя, на котором расположена система для определения координат цели в системе запрос-ответ, сообщаемая навигационной системой носителя, и значение разницы между направлением на цель и направлением прицеливания антенны. Посредством математических соотношений определяют: сферу с радиусом, равным измеренной дальности до объекта (сфера равной дальности); плоскость в нормальной системе координат (НСК) по ГОСТ 20058-80, параллельную плоскости XOZ НСК и расположенную на высоте цели (плоскость высоты цели); вертикальную (перпендикулярную плоскости XOZ НСК) плоскость, содержащую круг C1 и линию направления на отвечающую цель (плоскость азимутального пеленга на цель).
С помощью решения системы уравнений, составленной с использованием вышеуказанных математических соотношений, определяют точку, являющуюся местоположением цели.
Одним из недостатков способа и системы определения координат цели в системе запрос-ответ является возникновение ошибки в определении координат цели, связанной с различием направлений оси Y НСК (в которой задаются математическое соотношение для плоскости высоты цели и математическое соотношение для сферы равной дальности), и оси Y локальной системы координат (ЛСК) антенны, в которой измеряется отклонение направления на цель от направления антенны и в которой задается плоскость азимутального пеленга на цель. При значениях углов тангажа и(или) крена носителя в НСК, отличных от нуля, оси Y НСК и ЛСК не совпадают, что неизбежно приведет к ошибкам в определении координат цели.
Другим недостатком способа и системы определения координат цели в системе запрос-ответ является возникновение ошибки, связанной с тем, что для некоторых видов часто используемых антенн, например в виде одномерной линейки излучателей, диаграмма направленности антенны является не вертикальной плоскостью, перпендикулярной плоскости XOZ НСК или ЛСК, а воронкой, ось которой совпадает с линией раскрыва линейки излучателей. Поэтому действительный азимутальный пеленг на цель будет совпадать с измеряемым пеленгом лишь в том случае, когда направление на цель лежит в плоскости XOZ ЛСК.
Одним из способов устранения указанных недостатков может быть получение информации о текущем угловом положении антенны на носителе и носителя в пространстве (о положении осей координат координатных систем ЛСК и НСК), затем определение в ЛСК некоторой плоскости, в которой располагается цель, пересчет положения этой плоскости из ЛСК в НСК с использованием информации о текущем положении осей координат координатных систем, и, наконец, вычисление в НСК координат точек пересечения указанной плоскости, плоскости высоты цели и сферы равной дальности. В этом случае ошибки определения координат цели, связанные с тем, что используются значения координат из различных координатных систем, отсутствуют, так как все выражения, используемые при окончательном вычислении координат цели (для плоскости, в которой располагается цель, плоскости высоты цели и сферы равной дальности), используют значения координат в НСК.
Ошибки, связанные с тем, что фактическая диаграмма направленности антенны является воронкой, также будут отсутствовать, если плоскостью, в которой располагается цель, будет основание воронки (конуса), а не вертикальная (в ЛСК) плоскость азимутального пеленга, содержащая линию направления на цель.
Информация о текущем положении осей координат может быть получена от датчиков, входящих в рассматриваемую систему или внешних датчиков (из состава носителя системы), а определение математических выражений для плоскости основания воронки может быть получено по дальности до цели и отклонения направления на цель от направления раскрыва линейки излучателей антенны.
Технический результат изобретения заключается в повышении точности определения координат цели (ответчика) при любом положении антенны запросчика относительно носителя запросчика и при любом положении носителя запросчика в пространстве, в случае использования антенны в виде одномерной линейки излучателей, для которой диаграмма направленности является воронкой.
Технический результат для способа достигается тем, что способ определения координат цели в системе запрос-ответ с использованием имеющей заданное направление прицеливания антенны, позволяет объединять как минимум три параметра, которые отражают положение цели, положение носителя антенны и направление прицеливания антенны, при этом в качестве параметров используют расстояние от носителя до цели, высоту цели и высоту носителя, отклонение направления на цель относительно направления прицеливания антенны.
Причем способ отличается от прототипа тем, что используют антенну, диаграмма направленности которой является воронкой, при этом в качестве параметров дополнительно используют угловое положение носителя в пространстве и заданное угловое направление антенны на цель относительно носителя, а также перпендикулярную направлению раскрыва антенны плоскость, в которой расположена цель (основание воронки), при этом способ включает следующие последовательно осуществляемые этапы:
- устанавливают антенну в направлении цели так, чтобы ответ от цели оказался в основном лепестке диаграммы направленности антенны;
- получают с помощью системы запрос-ответ ответные сигналы от цели и определяют с помощью ЦВУ, используя математическое описание ДН антенны, отклонение в ЛСК антенны направления ответных сигналов от плоскости, перпендикулярной направлению раскрыва антенны и проходящей через центр раскрыва антенны;
- определяют дальность до цели преобразованием интервала времени от выдачи запроса до получения ответа от цели;
- определяют в ЛСК антенны положение плоскости (основания воронки), в которой расположена цель, по отклонению направления ответных сигналов от плоскости, перпендикулярной направлению раскрыва антенны и проходящей через центр раскрыва антенны, и измеренной дальности до цели;
- определяют положение плоскости, в которой расположена цель, в системе координат НСК путем пересчета из ЛСК в НСК координат точки пересечения указанной плоскости с линией, вдоль которой расположен раскрыв антенны, и координат вектора, начинающегося в точке с координатами [0, 0, 0] и параллельного линии, вдоль которой расположена линейка излучателей антенны;
- определяют плоскость высоты цели в НСК, используя полученную от цели с помощью системы запрос-ответ информацию о высоте цели, и сферу равной дальности до цели;
- вычисляют возможные положения цели в НСК, как координаты точек пересечения плоскости, в которой расположена цель, плоскости высоты цели и сферы равной дальности до цели;
- определяют углы между вектором целеуказания и каждым из направлений на возможные местоположения цели;
- производят отбор местоположения, для которого указанный угол имеет наименьшее значение;
- координаты отобранного местоположения будут являться координатами цели.
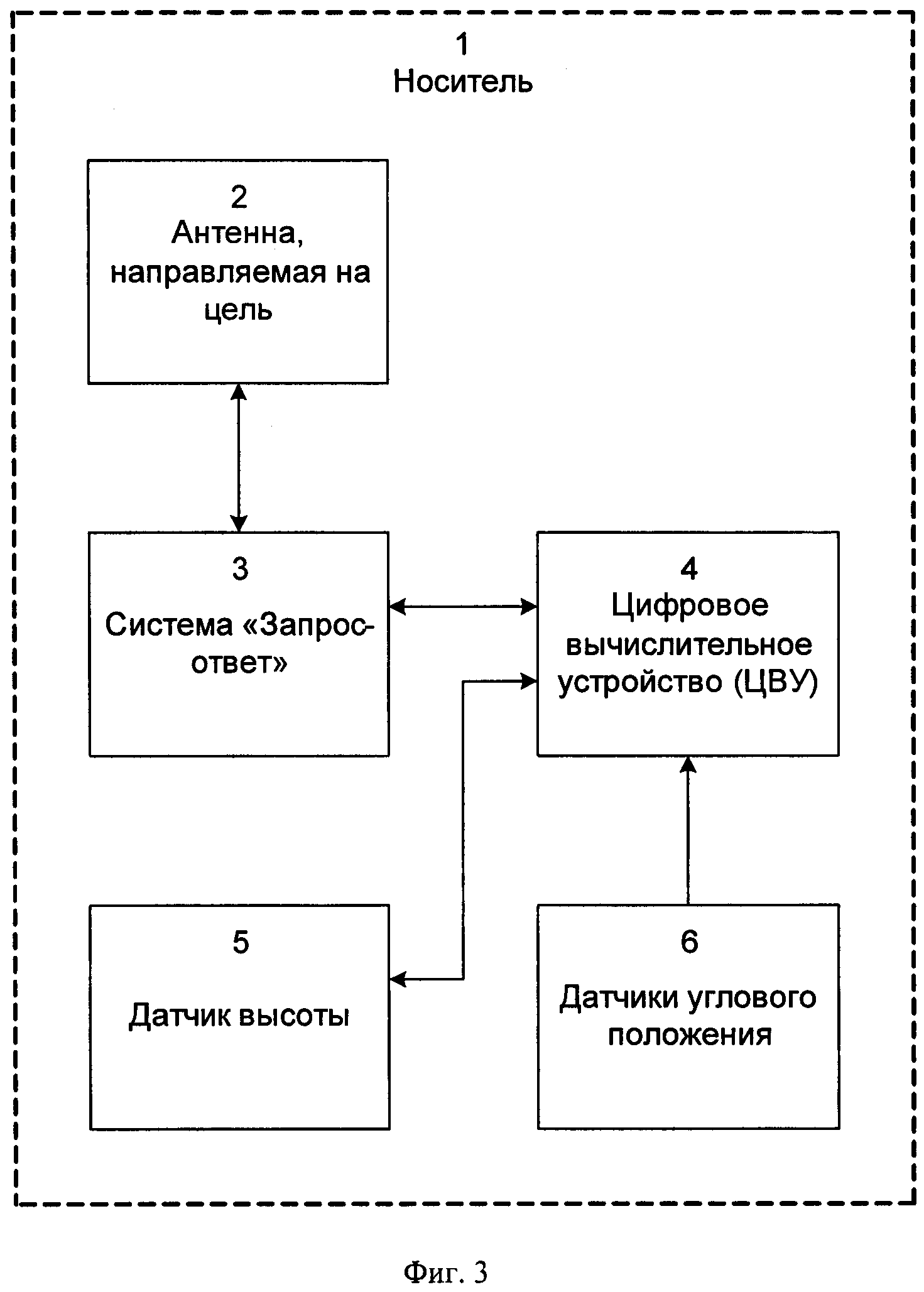
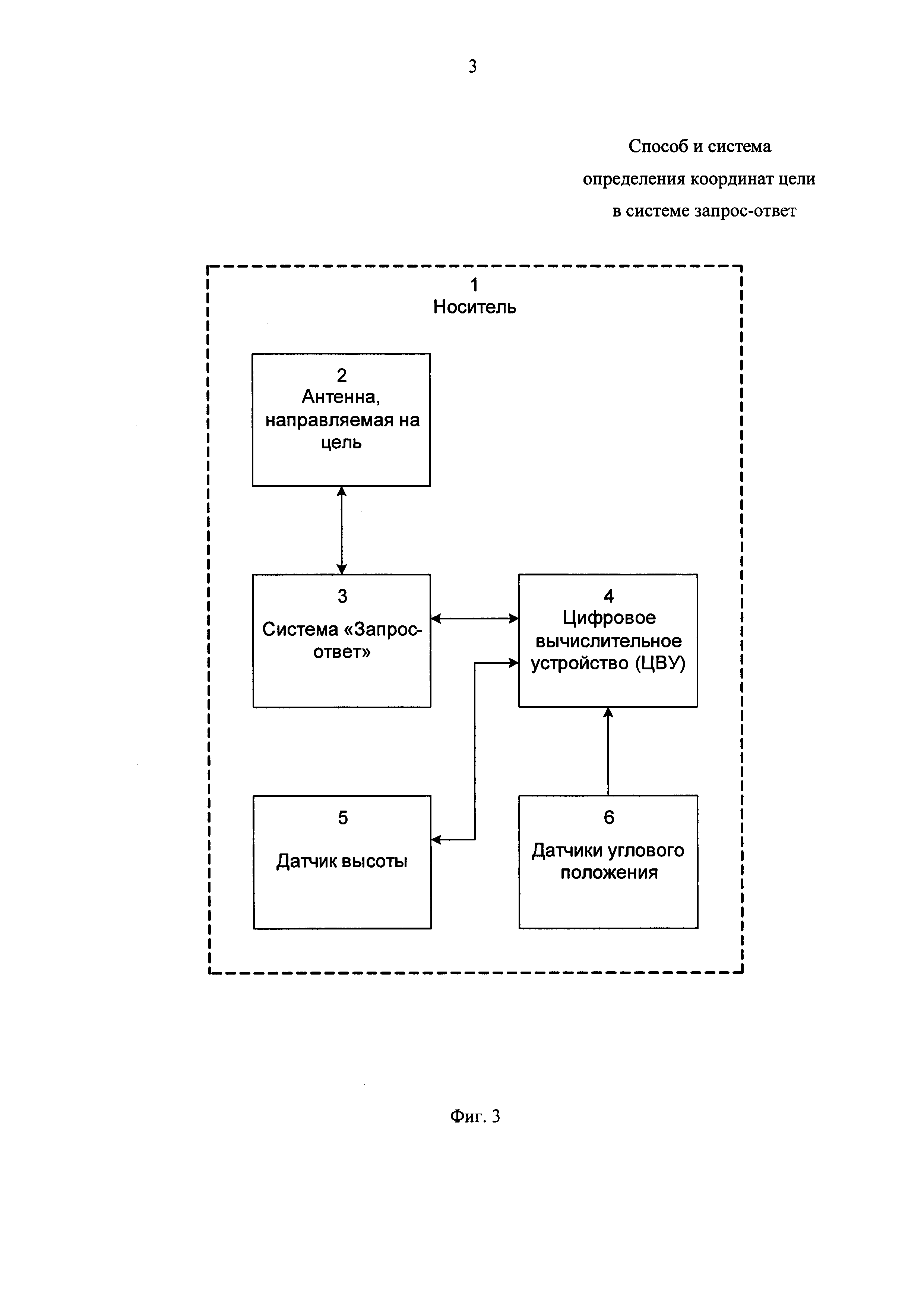
Технический результат системы для определения координат цели в системе запрос-ответ достигается тем, что система для определения координат цели в системе запрос-ответ, размещенная на носителе, включает антенну, направляемую на цель, систему запрос-ответ, выполненную с возможностью сопоставления как минимум трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, цифровое вычислительное устройство (ЦВУ), выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе, а также датчик высоты и датчики углового положения антенны, направляемой на цель. Причем первый вход-выход системы запрос-ответ связан с антенной, направленной на цель. Второй вход-выход системы запрос-ответ соединен с входом-выходом цифрового вычислительного устройства. Первый вход ЦВУ соединен с выходом датчика высоты. Система для определения координат цели в системе запрос-ответ отличается от прототипа тем, что дополнительно включает датчики углового положения антенны, направляемой на цель, выход которых соединен со вторым входом ЦВУ, при этом антенна выполнена с раскрывом в виде одномерной линейки излучателей, в которой равным углам отклонения направления на цель от плоскости, перпендикулярной линии раскрыва антенны, соответствует воронка.
Датчики углового положения антенны, направляемой на цель, отслеживают направление, однозначно определенное в ЛСК антенны (направление вдоль биссектрисы полезного сектора ДН антенны в плоскости, проходящей через середину раскрыва антенны и перпендикулярной линии раскрыва антенны), то есть измеряют угловые рассогласования указанного направления в азимутальной и угломестной плоскости от направления строительной оси носителя и передают измеренные значения в ЦВУ для использования в вычислениях.
Сущность изобретения поясняется чертежами, где на
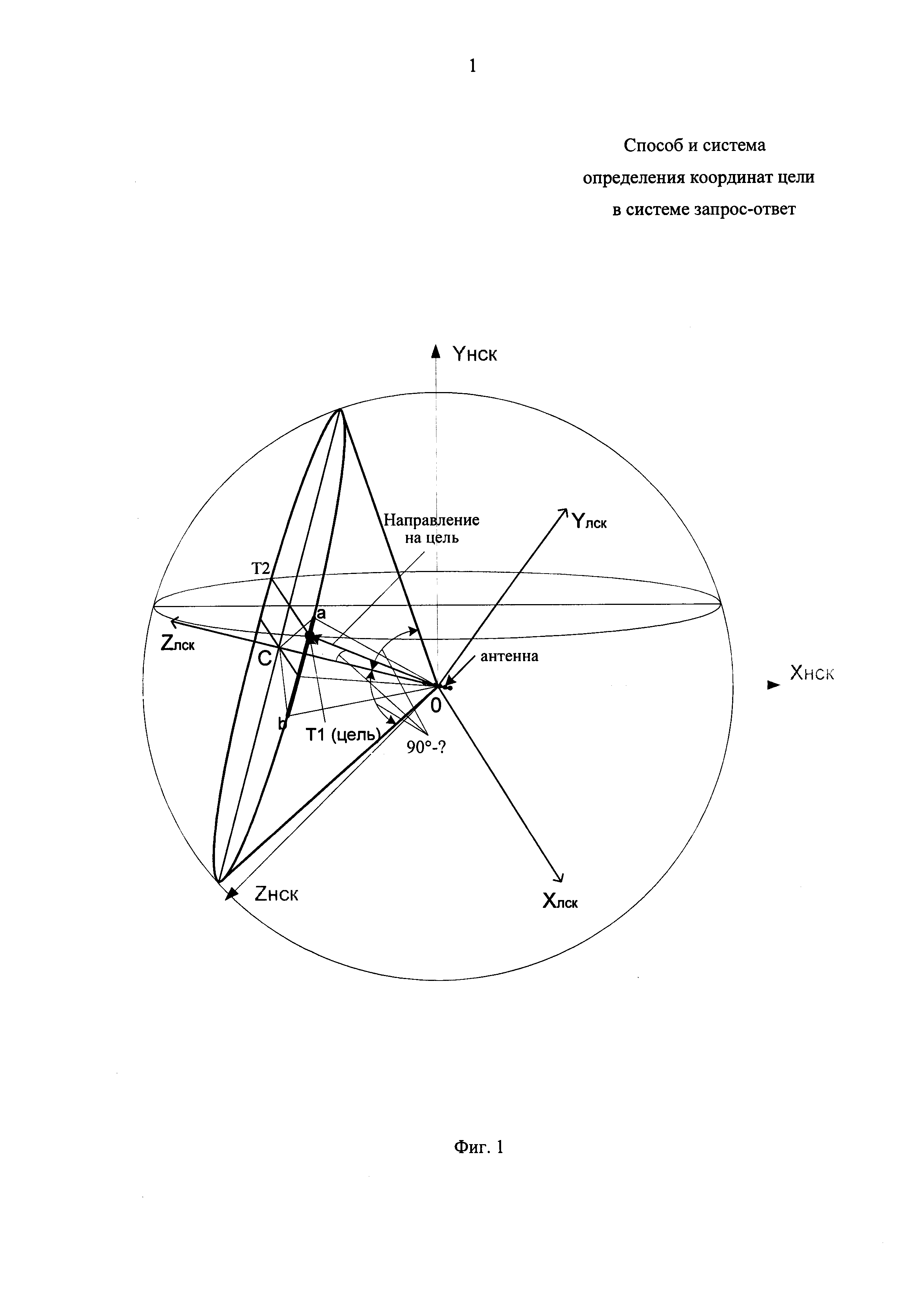
Фиг. 1 приведена локальная система координат (ЛСК) антенны;
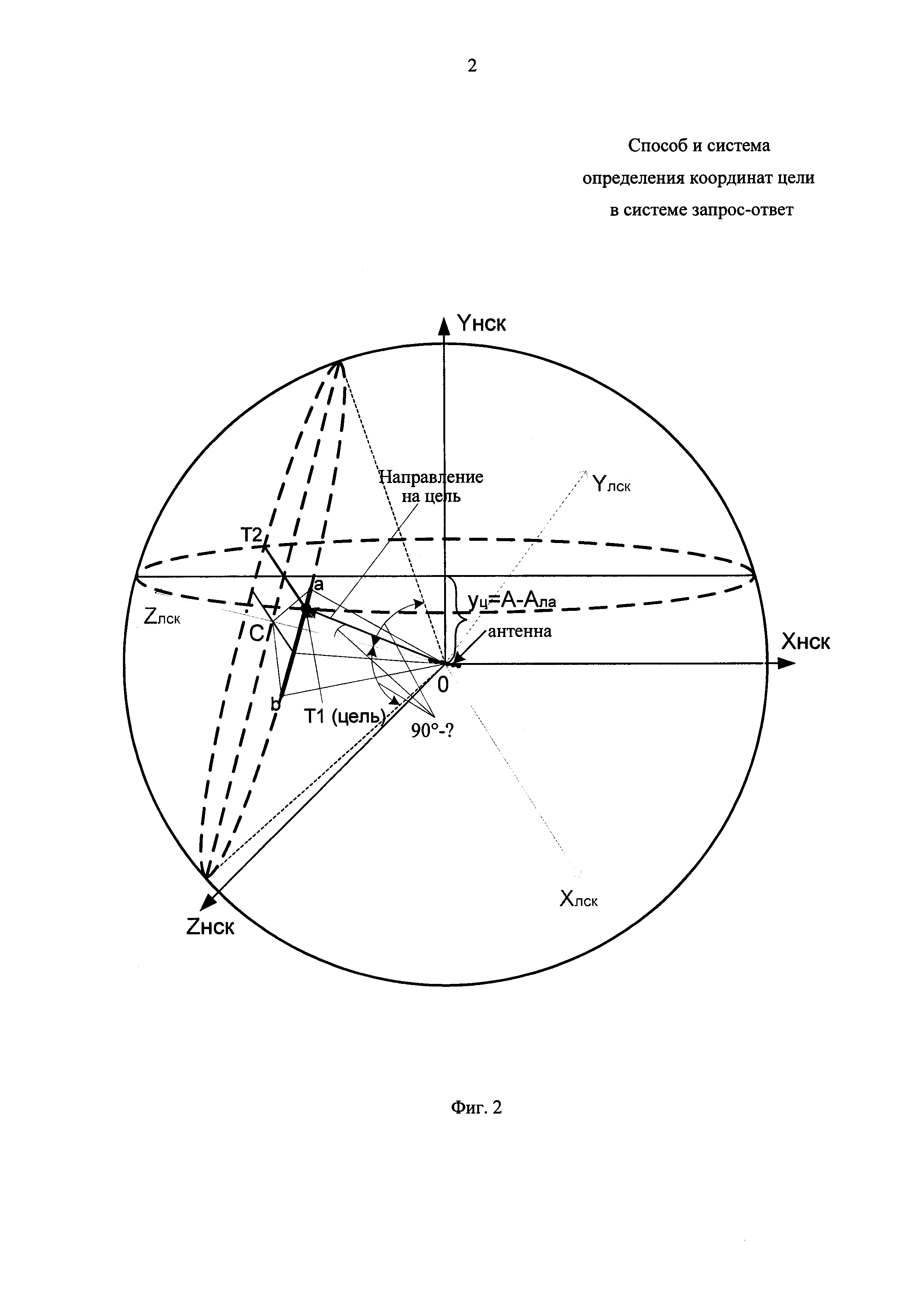
Фиг. 2 - нормальная система координат (НСК) носителя;
Фиг. 3 - структурная схема системы для определения координат цели в системе запрос-ответ.
На Фиг. 1 (в ЛСК антенны) представлены:
- оси ХЛСК, YЛСК, ZЛСК системы координат ЛСК, начало которой совпадает с началом системы координат НСК, оси которой ХНСК, YНСК, ZНСК также обозначены на чертеже. Ось ХЛСК всегда направлена в направлении разворота антенны перпендикулярно плоскости ее раскрыва, ось YЛСК направлена вверх от плоскости раскрыва антенны, ось ZЛСК также лежит в плоскости раскрыва антенны так, чтобы с осями ХЛСК, YЛСК образовалась правая прямоугольная система координат. Система координат ЛСК жестко связана с антенной, поэтому оси этой системы координат поворачиваются вместе с антенной при повороте антенны на носителе. Определение направления на цель, благодаря свойствам диаграммы направленности антенны, производится всегда в ЛСК, при этом диаграмма направленности антенны такова, что позволяет определить направление α на цель с требуемой погрешностью только в виде отклонения от плоскости, перпендикулярной раскрыву антенны и проходящей через его центр;
- конус, образованный линиями равного отклонения от плоскости, проходящей через центр раскрыва антенны, и перпендикулярной ему. Образующая конуса имеет длину D, равную расстоянию до цели, а плоскость его основания пересекает ось OZЛСК в точке С на расстоянии D*sin(α) от центра координат ЛСК;
- окружность а - Т1 - b - Т2 от пересечения образующей и основания конуса, а также от пересечения сферы одинаковой дальности D от носителя до цели с плоскостью основания конуса;
- часть окружности ab, показывающая полезный сектор ДН антенны в угломестной плоскости ЛСК;
- местоположение цели Т1, расположенной на сфере одинаковой дальности D и, следовательно, на окружности а - Т1 - b - Т2.
На Фиг. 2 (в НСК носителя) представлены:
- локальная система координат (ЛСК) антенны и нормальная система координат (НСК) носителя, начала координат ЛСК и НСК совпадают, а сам носитель расположен в точке начала координат НСК;
- окружность а - Т1 - b - Т2 от пересечения образующей и основания конуса, а также от пересечения сферы одинаковой дальности D от носителя до цели с плоскостью основания конуса, в общем случае не является перпендикулярной плоскости XOZ НСК;
- точка С пересечения плоскости окружности а - Т1 - b - Т2 с осью OZЛСК, расположенная на расстоянии D*sin(α) от центра координат, в совокупности с направлением оси OZЛСК, пересчитанным в НСК, полностью определяющая положение плоскости указанной окружности в НСК;
- окружность Т1-Т2 от пересечения плоскости одинаковой высоты цели yц=А-Ала со сферой одинаковой дальности. Плоскость, в которой лежит окружность, параллельна плоскости XОZ НСК.
Способ определения координат цели в системе запрос-ответ осуществляется следующим образом.
1. При выполнении циклов «Запрос носителя» - «Ответ цели» система определяет отклонение направления на цель от плоскости, перпендикулярной раскрыву антенны и проходящей через его центр. Результатом является значение угла α отклонения направления на цель от плоскости, перпендикулярной раскрыву антенны и проходящей через его центр. При этом, вследствие свойств диаграммы направленности антенны, определение направления на цель относительно других векторов или плоскостей затруднено или невозможно. Это означает, что цель может находиться на окружности а - Т1 - b - Т2 в любом месте. В процессе выполнения циклов «Запрос носителя» - «Ответ цели» используются запросы носителя определенного вида, ответы на которые содержат информацию об абсолютной высоте цели. Абсолютная высота носителя принимается от датчика высоты, установленного на носителе.
2. Для получения математического выражения плоскости, в которой расположена окружность а - Т1 - b - Т2, используются координаты в НСК точки С, принадлежащей указанной плоскости. Эта же точка принадлежит вектору ОС, перпендикулярному указанной плоскости. Пересчет координат точки С из ЛСК [XC_LSK, YC_LSK, ZC_LSK] в НСК [XC_NSK, YC_NSK, ZC_NSK] производится в соответствии с ГОСТ 20058-80 путем использования матрицы преобразования составляющих вектора:

Матрица преобразования составляющих вектора, в свою очередь, образуется последовательным перемножением матриц поворотов системы координат ЛСК, отражающих поворот системы координат ЛСК на углы угломестного и азимутального смещения ЛСК относительно ССК, на углы крена, тангажа и рыскания ССК относительно НСК (информация о соответствующих углах принимается от датчиков углового положения антенны, установленных на носителе):

где ψ, ϑ, γ, β, ε - значения поворотов на углы рыскания, тангажа и крена системы координат ССК относительно НСК, на углы азимутального и угломестного поворота ЛСК относительно ССК соответственно.
Математическое выражение, описывающее (в НСК) плоскость, в которой расположена окружность а - Т1 - b - Т2, определяется по координатам точки, принадлежащей этой плоскости, и по координатам вектора, перпендикулярного этой плоскости:
XC_NSK⋅(x-XC_NSK)+YC_NSK⋅(y-YC_NSK)+ZC_NSK⋅(z-ZC_NSK)=0.
После преобразований математическое выражение для плоскости имеет вид:
ХС_NSK⋅x+YC_NSK⋅y+ZC_NSK⋅z-(XC_NSK2+YC_NSK2+ZC_NSK2)=0.
3. Точки возможного местонахождения цели должны одновременно принадлежать:
- плоскости, в которой расположена окружность а - Т1 - b - Т2;
- сфере с радиусом D одинаковой дальности до цели;
- плоскости одинаковой высоты цели.
Математически это описывается системой уравнений:

где
- первое уравнение - уравнение плоскости, в которой расположена окружность а - Т1 - b - Т2, в системе координат НСК;
- второе уравнение - уравнение сферы одинаковой дальности до цели в системе координат НСК;
- третье уравнение - уравнение плоскости одинаковой высоты цели относительно носителя в системе координат НСК.
После замены переменных
a=XC_NSK,
b=YC_NSK,
c=ZC_NSK.
е2=ХС_NSK2+YC_NSK2+ZC_NSK2,
h=A-АЛА
система уравнений принимает вид:

Можно показать, что решением указанной системы уравнений будут значения координат возможных местоположений T1, Т2 цели:


4. Отбор одного из двух возможных местоположений цели производится по заданному критерию, например - по наименьшему отклонению направления на цель от направления разворота антенны (от направления целеуказания). Направление целеуказания может быть задано изначально или может определяться (как направление разворота антенны) исходя из предположения, что направление разворота антенны является направлением вектора оси ХЛСК, имеющим в ЛСК координаты [1, 0, 0]T. Во втором случае пересчет координат вектора направления разворота антенны из ЛСК в НСК производится с использованием матрицы преобразования составляющих вектора, пересчитанные координаты вектора принимаются в качестве координат вектора направления целеуказания:

Углы между двумя векторами (направлением целеуказания и направлениями на возможное местоположение цели) определяются, например, вычислением косинусов этих углов по формуле (выводится из формулы для скалярного произведения векторов)

где χi, [TiX_NSK, TiY_NSK, TiZ_NSK] - угол между вектором целеуказания и направлением на i-e местоположение цели и координаты i-го местоположения цели соответственно.
После определения углов между вектором целеуказания и каждым из направлений на возможные местоположения цели производится отбор того местоположения, для которого указанный угол имеет наименьшее значение. Координаты отобранного местоположения будут являться координатами цели.
Система для определения координат цели в системе запрос-ответ (Фиг. 3), размещенная на носителе 1, включает направляемую на цель антенну 2, раскрыв которой выполнен в виде одномерной линейки излучателей, систему запрос-ответ 3, выполненную с возможностью сопоставления как минимум трех параметров, представляющих положение цели, положение носителя и направление прицеливания антенны для определения местоположения цели, а также цифровое вычислительное устройство 4 (ЦВУ) (в частном случае может быть составной частью системы запрос-ответ), выполненное с возможностью вычисления координат цели при любом положении носителя и антенны на носителе, датчик высоты 5 и датчики углового положения антенны 6, направляемой на цель. При этом первый вход-выход системы запрос-ответ 3 связан с антенной 2, направляемой на цель. Второй вход-выход системы запрос-ответ 3 соединен с входом-выходом цифрового вычислительного устройства 4. Первый вход ЦВУ 4 соединен с выходом датчика высоты 5. Второй вход ЦВУ 4 соединен с выходом датчиков углового положения 6.
Система определения координат цели в системе запрос-ответ работает следующим образом:
- разворачивают антенну (или носитель с антенной, если антенна неподвижна относительно носителя) в направлении цели так, чтобы ответ от цели оказался в основном лепестке диаграммы направленности антенны;
- в процессе исполнения циклов «Запрос от носителя» - «Ответ от цели» система получает ответные сигналы от цели и с помощью ЦВУ, используя математическое описание ДН антенны, определяет отклонение в ЛСК антенны направления ответных сигналов от плоскости, перпендикулярной направлению раскрыва антенны и проходящей через центр раскрыва антенны;
- в процессе исполнения циклов «Запрос от носителя» - «Ответ от цели» система определяет дальность D до цели преобразованием интервала времени от выдачи запроса до получения ответа от цели;
- система с помощью ЦВУ определяет в ЛСК антенны положение плоскости, в которой расположена цель, по отклонению направления ответных сигналов от плоскости, перпендикулярной направлению раскрыва антенны и проходящей через центр раскрыва антенны, и измеренной дальности до цели;
- система с помощью ЦВУ определяет положение плоскости, в которой расположена цель, в системе координат НСК, путем пересчета из ЛСК в НСК координат точки С пересечения указанной плоскости с линией, вдоль которой расположен раскрыв антенны, и координат вектора, начинающегося в точке с координатами [0, 0, 0] и параллельного линии, вдоль которой расположена линейка излучателей антенны, используя, например, матрицу MLSK→NSK преобразования составляющих вектора (по ГОСТ 20058-80). При вычислении матрицы преобразования составляющих вектора используются значения рыскания, тангажа и крена носителя от датчиков, определяющих положение носителя, и значения рыскания, тангажа и крена антенны на носителе:

- система с помощью ЦВУ определяет положение плоскости высоты цели в НСК, используя полученную от цели с помощью системы запрос-ответ информацию А о высоте цели и полученную от датчиков носителя информацию АЛА о высоте носителя;
- система с помощью ЦВУ находит решения совокупности математических уравнений:

представляющие координаты  и
и  в НСК возможных положений Т1 и Т2 цели в пространстве;
в НСК возможных положений Т1 и Т2 цели в пространстве;
- из найденных решений (максимально - два решения) система отбирает одно, удовлетворяющее условию минимального отклонения положения цели в пространстве от заданного направления (например, от направления целеуказания или от направления, в которое установлена антенна), путем определения углов между направлениями на положение цели в пространстве и заданным направлением, с последующим отбором направления, для которого угол отклонения минимален:

Таким образом, повышение точности определения координат цели (ответчика) при любом положении антенны запросчика относительно носителя запросчика и при любом положении носителя запросчика в пространстве осуществляют путем получения информации от датчиков углового положения о текущем угловом положении антенны на носителе и носителя в пространстве (о положении осей координат координатных систем ЛСК и НСК), пересчета положения перпендикулярной раскрыву антенны плоскости, в которой лежит цель, из ЛСК в НСК с использованием информации о текущем положении осей координат координатных систем, и вычисления координат точек пересечения указанной плоскости, плоскости высоты цели и сферы равной дальности.
Разъёмное резьбовое соединение деталей, гайка разъёмного соединения
Способ измерения поляризационной матрицы рассеяния объекта с компенсацией искажений
Способ определения угловых координат цели с помощью линейной антенной решетки
Способ определения азимута цели с помощью интерполированной пеленгационной характеристики
Кожух прямоугольного разъёма
Устройство для лечения раневой инфекции и дерматологических заболеваний
Способ пассивной радиолокации движущегося источника радиоизлучения
Пороговое устройство для сигналов систем управления воздушным движением
Устройство для крепления и охлаждения активного прибора
Способ монтажа микросборок в корпус модуля
Разъёмное резьбовое соединение деталей, гайка разъёмного соединения
Способ измерения поляризационной матрицы рассеяния объекта с компенсацией искажений
Способ определения угловых координат цели с помощью линейной антенной решетки
Способ определения азимута цели с помощью интерполированной пеленгационной характеристики
Кожух прямоугольного разъёма
Устройство для лечения раневой инфекции и дерматологических заболеваний
Способ пассивной радиолокации движущегося источника радиоизлучения
Пороговое устройство для сигналов систем управления воздушным движением
Способ и устройство вычисления текущего значения углов атаки и скольжения летательного аппарата
Способ и система для определения координат цели в системе "запрос-ответ"

