Результат интеллектуальной деятельности: ОПТИЧЕСКИЙ СПОСОБ ДЛЯ КОНТРОЛЯ ПРОЗРАЧНЫХ ИЛИ ПОЛУПРОЗРАЧНЫХ КОНТЕЙНЕРОВ С НАНЕСЕННЫМ ВИДИМЫМ ИЗОБРАЖЕНИЕМ
Вид РИД
Изобретение
Настоящее изобретение относится к области оптического контроля полупрозрачных или прозрачных контейнеров, для детектирования поглощения света, и/или преломления света, и/или отражения света от дефектов, если такие вообще присутствуют на таких контейнерах.
Изобретение, в частности, особо предпочтительно применять при детектировании дефектов контейнеров, изготовленных из стекла или пластикового материала и которые включают в себя видимые структуры в широком смысле, такие как украшения, гребни, ушки или выемки установки положения, и/или метки идентификации или аутентификации, такие как формованные номера или товарные знаки производителя и т.д.
На производственной линии известно выполнение автоматического контроля контейнеров, перемещающихся с высокой скоростью мимо станции оптического контроля, которая включает в себя систему визуализации, имеющую источник света, расположенный с одной стороны контейнера, и камеру, расположенную с другой стороны контейнера. Камера снимает изображения в результате пропускания света через контейнеры. Такая технология освещения называется технологией "пропускания". Естественно, множество станций контроля требуется для полного контроля контейнеров. Таким образом, известно использование оборудования, содержащего от шести до двадцати четырех камер для контроля вертикальных стенок контейнеров. Для контроля донышек контейнеров предусмотрена другая система визуализации, в которой камера расположена над контейнером, и источник света установлен под донышком контейнера. Изображение донышка контейнера снимают со стороны его горлышка. Используют другие оптические системы, в которых свет может, в случае необходимости, быть структурированным, в случае необходимости коллимированным, в случае необходимости поляризованным и т.д.
Дополнительные другие устройства можно использовать для детектирования дефектов, которые отражают свет, таких как, например, глазурь. Все эти оптические устройства имеют общий этап получения по меньшей мере одного изображения каждого контейнера для контроля.
В общем, изображения контейнеров анализируют с помощью системы электронной обработки, которая состоит в преобразовании в цифровую форму изображений, и затем в использовании компьютеров для их анализа, для определения наличия дефектов в контейнерах.
Для детектирования дефектов в контейнерах, из уровня техники, например, как описано в заявке на патент EP 1,560,018, известна подготовка цифровой маски и сравнение изображений, снятых с цифровой маской. В конкретной ситуации этого патента контейнеры устанавливают с вращением вокруг их осей симметрии, и снимают последовательность изображений. В этой системе контроля с вращением возникает недостаток использования цифровых масок, когда необходимо обрабатывать множество разных цифровых масок для того, чтобы учитывать конкретные особенности, такие как структуры на контейнерах, поскольку при съемке изображения эти особенности проявляются в разных положениях при вращении изделия вокруг его оси.
В соответствии с этим документом, следует учитывать, что цифровая маска представляет собой изображение, то есть массив значений или пикселей, который пригоден для наложения на изображение, предназначенное для обработки, при этом значения его пикселей модифицируют способ, в соответствии с которым обрабатывают пиксели в изображении, предназначенном для обработки. Например, значения пикселей в цифровой маске используют как карту локальных пороговых значений, с которыми сравнивают пиксели изображения, предназначенного для обработки. Однако значения цифровых масок также могут определять размер фильтра, усиление и т.д. для применения для каждого из этих пикселей в изображении, предназначенном для обработки.
Также из статьи, опубликованной в "Glass worldwide ", Issue 33, 2011, страница 32 "Quality control solutions for cosmetics", известен способ анализа изображений контейнеров, в котором цифровая маска построена путем обучения на основе фактического производства, причем такое обучение позволяет учитывать различные эффекты, которые рекуррентно возникают в бутылках, таких как, например, тени на кромках изделий.
Поскольку структуры, расположенные на контейнерах, ориентированы случайно в момент съемки изображений, эту технологию нельзя применять для зоны, в которой может присутствовать структура, поскольку обучение может привести к тому, что в этой области чувствительность детектирования будет полностью устранена.
Известно размещение определенных типов структуры в изображениях контейнеров и применение обработки изображения за пределами этих структур для исключения учета упомянутых структур, как дефектов. Однако, в таких обстоятельствах, сами структуры не анализируют, даже если они действительно содержат дефекты. Это представляет собой то же самое, что и установление зон "без обработки" поверх структур.
Когда упомянутые структуры вытравливают в стекле, как это делается при контроле стеклянных контейнеров непосредственно после их изготовления, в них также присутствует довольно большая изменчивость контраста, что означает, что их нельзя рассматривать просто, как двоичные геометрические формы.
Таким образом, в частности, трудно детектировать дефекты в контейнерах, которые представляют визуальные структуры, такие как, например, гребни или метки идентификации или положения. Обработка изображений должна учитывать присутствие таких видимых структур в снимаемых изображениях. Основная трудность также проявляется при детектировании дефектов, которые расположены в видимой структуре контейнера.
В уровне техники также известен оптический способ из заявки на патент WO 97/06429, который используется для детектирования дефектов резьбы контейнеров, в таком способе стремятся получить множество изображений контейнеров и найти определенные зоны обработки для детектирования дефектов. Для каждой зоны обработки все пиксели в зоне сравнивают с пороговым значением. Пороговое значение рассчитывают исключительно на основе общей статистики для каждой зоны. Эта технология не позволяет выполнять тонкий анализ сложных изображений и детектировать дефекты в контейнерах, которые представляют видимые структуры, такие как, например, гребни или метки идентификации или положения.
В документе US 2005/259868 описан оптический способ контроля объектов, который состоит в получении последовательности изображений объекта и в сравнении по меньшей мере одного изображения из полученной последовательности с изображением, снятым в предварительно записанной последовательности изображений. В этом документе описана установка изображений для геометрической операции, содержащей сдвиг и перевод и/или движение с поворотом перед сравнением изображений друг с другом. Такой способ не пригоден для контроля рельефных структур, присутствующих на прозрачных объектах, когда структуры переменны и когда их изображения также сильно изменяются, как функция положения объекта относительно источника освещения и устройств наблюдения, поскольку преломление не происходит в том типе объектов, которые наблюдают, используя этот способ.
Настоящее изобретение направлено на устранение недостатков предшествующего уровня техники, предлагая новый оптический способ для контроля прозрачных или полупрозрачных контейнеров, имеющих видимые структуры, способ разработан, в частности, для детектирования дефектов в зонах контейнеров, которые включают в себя такие видимые структуры, при этом возможно успешно выполнять инспекцию, независимо от положений видимых структур в снимаемых изображениях.
Для достижения такой цели оптический способ, в соответствии с изобретением, направлен на использование системы визуализации для контроля контейнеров, изготовленных из прозрачного или полупрозрачного материала и включающих в себя по меньшей мере одну видимую структуру.
В соответствии с изобретением способ состоит из следующего:
- освещают контейнеры, перемещающиеся вдоль системы визуализации;
- формируют по меньшей мере одно изображение каждого контейнера, перемещающегося вдоль системы визуализации, причем каждое изображение содержит заданное количество пикселей, каждый пиксель имеет соответствующий уровень интенсивности;
- определяют в изображении контейнера по меньшей мере одну зону обработки, включающую в себя по меньшей мере одну видимую структуру для контроля и по меньшей мере одну зону поиска, в которой появляется по меньшей мере одна видимая структура маркера;
- подготавливают цифровую маску, по меньшей мере, для зоны обработки изображений;
- определяют положения и ориентацию видимой структуры маркера в упомянутой зоне поиска изображения контейнера;
- применяют геометрическое преобразование для цифровой маски или для зоны обработки, причем такое преобразование представляет собой функцию положения и ориентации видимой структуры маркера для обеспечения возможности во время этапа обработки размещения маски и зоны обработки в положение, в котором они совпадают;
- применяют обработку изображения для каждого пикселя зоны обработки, обработка зависит от значения интенсивности совпадающего пикселя цифровой маски для детектирования присутствия каких-либо дефектов в контейнере; и
- обновляют цифровую маску путем:
- учета по меньшей мере одного изображения контейнеров; и
- определения, следует или нет модифицировать цифровую маску как функцию упомянутого изображения, модификация маски, состоящая в следующем:
- определяют положение и ориентацию видимой структуры для контроля в зоне обработки изображений;
- применяют геометрическое преобразование для зоны обработки изображения или для маски для обеспечения возможности размещения маски и зоны обработки в положении, в котором они совпадают; и
- объединяют, по меньшей мере, зоны обработки изображения и маски для обновления цифровой маски.
Кроме того, способ, в соответствии с изобретением, может также присутствовать в комбинации по меньшей мере одной и/или другой из следующих дополнительных характеристик:
- подготавливают цифровую маску на этапе инициализации из по меньшей мере одного изображения контейнера;
- применяют обработку изображения к каждому пикселю зоны обработки, при такой обработке каждый пиксель зоны обработки сравнивают с совпадающим пикселем цифровой маски;
- анализируют изображения для детектирования дефектов в видимой структуре;
- применяют сдвиг при переводе, и/или вращении, и/или анаморфозе в виде геометрического преобразования; и
- перед этапом обработки выполняют этап фильтрации для снятых изображений контейнеров и учитывают изображения, в которых упомянутый этап фильтрации был применен на этапе обновления маски.
Различные другие характеристики будут понятны из следующего описания, которое представлено со ссылкой на приложенные чертежи, на которых показаны варианты осуществления изобретения, как неограничительные примеры.
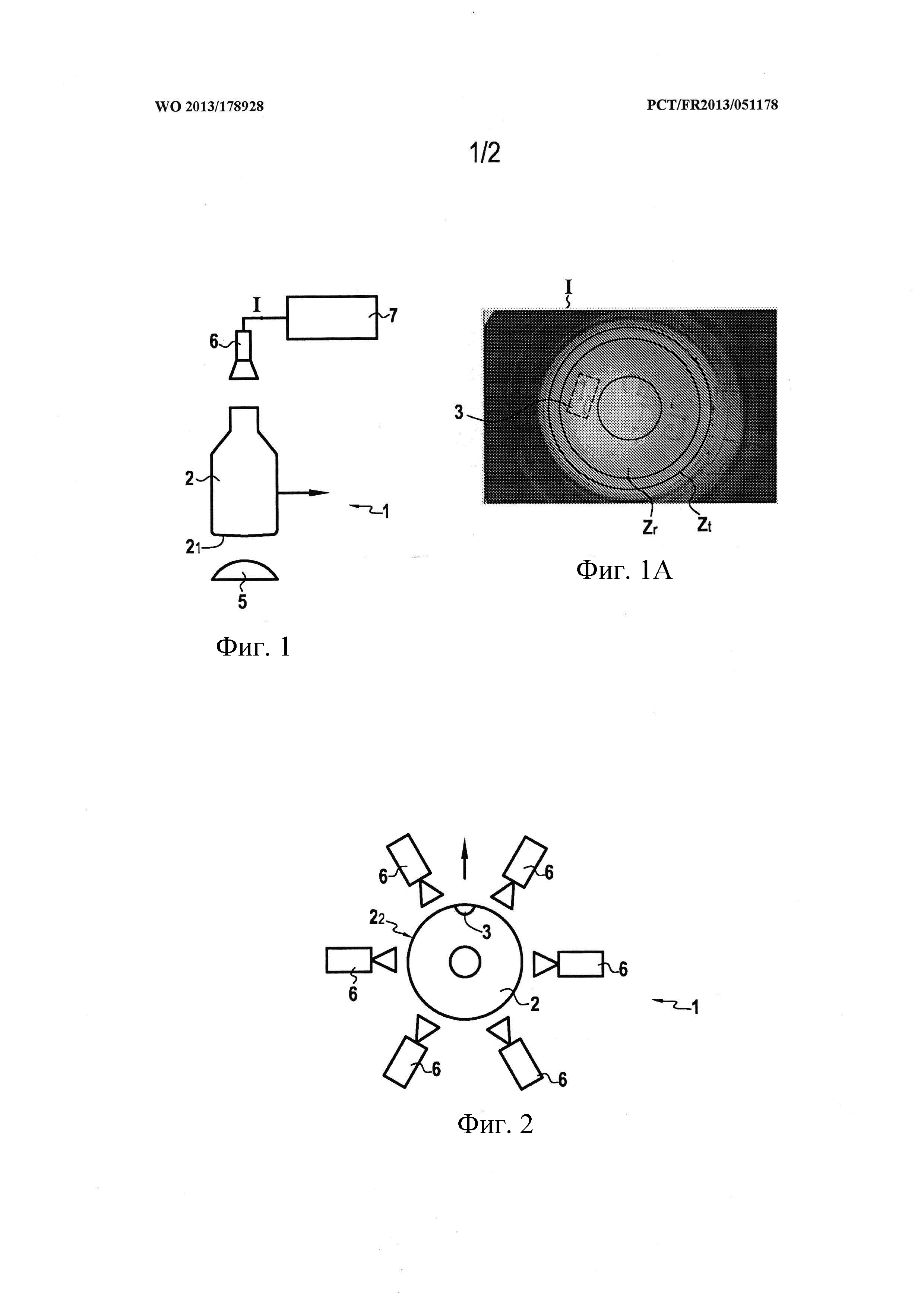
Фиг. 1 - схематичный вид системы визуализации, в частности, предназначенной для контроля донышек контейнеров, каждое из которых включает в себя по меньшей мере одну видимую структуру.
Фиг. 1А - пример изображения донышка контейнера, в котором можно видеть видимую структуру.
Фиг. 2 - схематичный вид системы визуализации, выполненной с возможностью, в частности, контроля стенки контейнера, в которой предусмотрена по меньшей мере одна видимая структура.
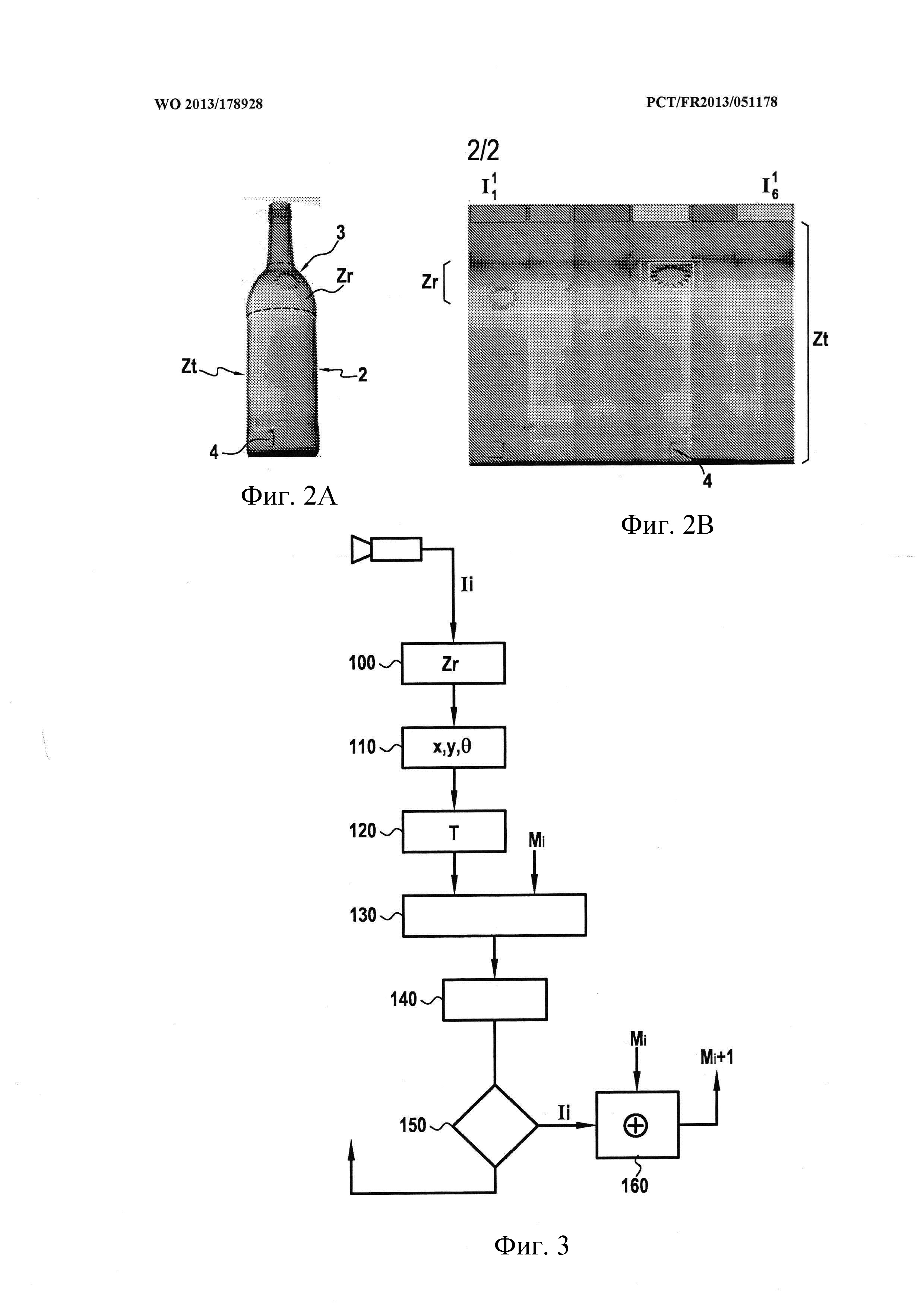
Фиг. 2А - пример изображения контейнера, имеющего видимую структуру на его стенке.
Фиг. 2В - последовательность составных анаморфных изображений и снимки контейнера, показанного на фиг. 2А, движущегося вдоль системы визуализации.
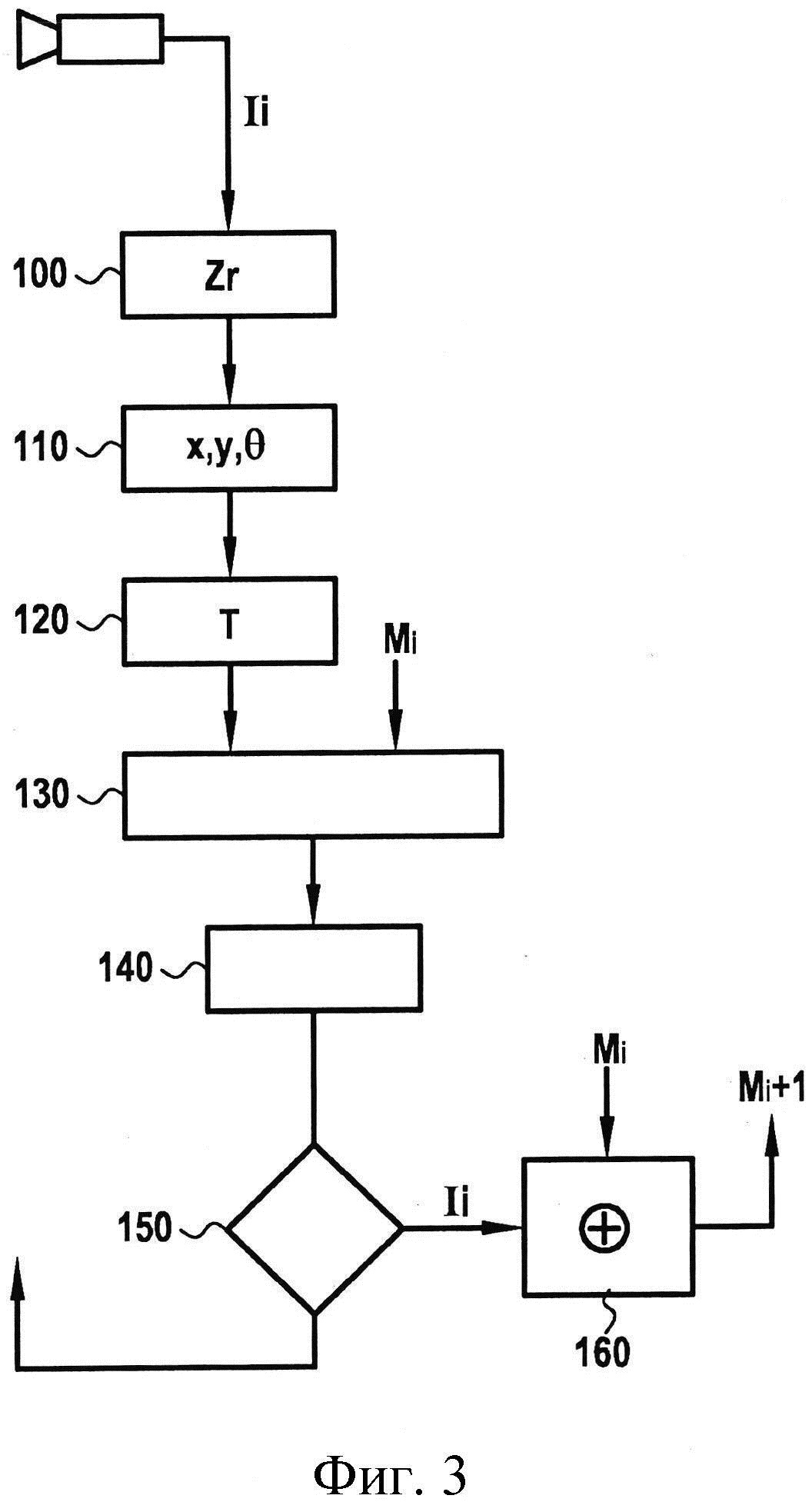
Фиг. 3 - упрощенная блок-схема последовательности операций способа в соответствии с изобретением.
Как можно видеть на фиг. 1 и 2, изобретение относится к использованию системы 1 визуализации для контроля контейнеров 2, изготовленных из прозрачного или полупрозрачного материала, таких как бутылки, банки или флаконы, изготовленные из стекла и на которых предусмотрена по меньшей мере одна видимая структура 3, такая как декорация, гребень, ушко или выемка установки положения и/или метка идентификации или аутентификации, такая как номер формы. Такая видимая структура может быть получена, в частности, путем формования, вытравливания или печати.
Изобретение направлено на инспекцию контейнеров для детектирования дефектов, расположенных, в частности, в зонах контейнеров, в которых присутствует по меньшей мере одна видимая структура 3. Способ контроля, более конкретно, направлен на инспекцию контейнеров, для которых не гарантируется повторная обработка, то есть для которых положения и ориентации контейнеров 2 относительно системы 1 визуализации могут изменяться от одного контейнера к другому. В общем, контейнеры 2 представляют собой тела вращения вокруг вертикальной оси, и их представляют в станцию контроля в случайной ориентации вокруг их оси симметрии.
Обычным образом система 1 визуализации применятся для съемки одного или больше изображения каждого контейнера 2, последовательно перемещающегося с высокой скоростью вдоль системы визуализации. Естественно, система 1 визуализации выполнена с возможностью или сконфигурирована так, чтобы снимать изображения контейнеров 2, причем каждое изображение, имеющее по меньшей мере одну зону Zt обработки, определенную в ней, в которой появляется по меньшей мере одна выбранная видимая структура 3, также называемая видимой структурой для контроля. Зона Zt обработки соответствует зоне контейнера, которую инспектируют для определения, соответствует ли этот контейнер. Такая зона Zt обработки, которая включает в себя по меньшей мере одну выбранную визуальную структуру 3, может быть ограничена областью, покрытой этой визуальной структурой 3, или она может охватывать область, которая больше, чем область, занятая визуальной структурой 3. Назначение определения зоны обработки состоит в том, чтобы обеспечить возможность выполнения контроля в пределах визуальной структуры 3 и/или в непосредственной близости к упомянутой визуальной структуре.
На фиг. 1 и 1А показан вариант осуществления изобретения, в котором система 1 визуализации выполнена с возможностью контроля донышка 21 контейнеров 2, каждое из которых включает в себя по меньшей мере одну визуальную структуру 3. В этом примере система 1 визуализации имеет источник 5 света, расположенный над донышком 21 контейнера 2, и камеру 6, в которой предусмотрен объектив, расположенную над контейнером 2. Камера 6 соединена с модулем 7 для получения и обработки изображений I, снимаемых камерой для каждого контейнера 2. На фиг. 1А показан пример изображения I донышка контейнера для контроля, в котором определена по меньшей мере одна зона Zt обработки, включающая в себя по меньшей мере одну выбранную видимую структуру 3 для контроля, а именно товарный знак изготовителя или обозначение содержания.
На фиг. 2А к 2В показан другой вариант осуществления изобретения, в котором система 1 визуализации выполнена с возможностью контроля стенки 22 контейнеров 2. В этом примере зона Zt обработки относится к участку стенки, на котором представлен гребень, в качестве визуальной структуры 3 для контроля. В этом примере система 1 визуализации включает в себя по меньшей мере один источник света (не показан) и последовательность камер 6, каждая из которых имеет свой собственный объектив (в представленном примере присутствует шесть из них), и эти камеры распределены под углом таким образом, что изображения, снимаемые разными камерами 6, охватывают весь внешний контур каждого контейнера 2, перемещающегося мимо станции 1 визуализации. Предпочтительно камеры 6 расположены таким образом, что изображения, снимаемые двумя расположенными рядом камерами, охватывают общую зону контейнера так, что обеспечивается возможность надежного контроля всей окружности контейнера 2. На фиг. 2В показан пример шести миниатюрных изображений images  ,
,  ,
,  , …,
, …,  для одного и того же контейнера, причем некоторые из миниатюрных изображений включают в себя визуальную структуру 3 для контроля, а именно гребень.
для одного и того же контейнера, причем некоторые из миниатюрных изображений включают в себя визуальную структуру 3 для контроля, а именно гребень.
Естественно, что система 1 визуализации может быть изготовлена любым соответствующим способом, кроме описанного в этом примере. Независимо от способа, в соответствии с которым она изготовлена, система 1 визуализации позволяет для каждого контейнера 2, перемещающегося последовательно через систему визуализации, освещать контейнер и снимать по меньшей мере одно изображение Ii контейнера. Каждое снятое изображение Ii содержит определенное множество пикселей, каждый из которых имеет заданный уровень интенсивности.
Способ контроля, в соответствии с изобретением, таким образом, состоит в выборе по меньшей мере одной зоны Zt обработки, включающей в себя по меньшей мере одну визуальную структуру 3 для контроля последовательности контейнеров 2, которые перемещают последовательно через станцию 1 визуализации.
Кроме того, и как показано на фиг. 3, способ, в соответствии с изобретением, состоит в этапе 100 выбора визуальной структуры 3 "маркера" и учета по меньшей мере одной зоны Zr поиска в снятых изображениях Ii, зона Zr поиска, имеющая по меньшей мере одну выбранную визуальную структуру 3 "маркера", появляющуюся в ней. Следует заметить, что визуальная структура 3 маркера, расположенная в зоне Zr поиска, в случае необходимости, может соответствовать визуальной структуре 3 для контроля, присутствующей в зоне Zt обработки. В примере, показанном на фиг. 2А, зона Zr поиска соответствует зоне ограниченной высоты в изображениях, соответствующей, по существу, плечам контейнеров и в которой в качестве визуальной структуры 3 расположен гребень, который также формирует часть зоны Zt обработки. Естественно, как упомянуто выше, визуальная структура 3 маркера, которая расположена в зоне Zr поиска, не соответствует видимой структуре 3 для контроля, которая присутствует в зоне Zt обработки. Таким образом, в качестве примера, может быть предусмотрено, чтобы зона обработки включала в себя гребень в качестве видимой структуры для контроля, в то время, как зона поиска включает в себя выемку 4 установки положения, в качестве ее визуальной структуры 3 маркера. В предпочтительном варианте осуществления зона Zr поиска и зона Zt обработки имеют общую видимую структуру 3, то есть визуальная структура для контроля соответствует визуальной структуре маркера.
Способ, в соответствии с изобретением, включает этап 110 определения места выбранной визуальной структуры 3 (или маркера) в зоне Zr поиска. Другими словами, такой этап определения места положения состоит в определении положения и ориентации визуальной структуры 3 маркера в изображении Ii. Следует понимать, что этот этап позволяет в заданных рамках рассмотрения определять координаты х, у и ориентацию θ визуальных структур 3, которые появляются в различных изображениях Ii контейнеров 2.
Положения визуальных структур 3 в изображениях Ii могут изменяться, поскольку контейнеры 2 занимают разные положения и/или ориентации при их поступлении в систему 1 визуализации, в частности во время съемки изображения.
Более точно, во время этапа обучения, этот этап определения местоположения состоит в записи морфологических, и/или структурных, и/или фотометрических характеристик выбранной визуальной структуры 3 (или маркера). Для определения местоположения выбранной визуальной структуры (или маркера) способ состоит в использовании любого обычного способа поиска (например, используя сопоставление со структурой) для поиска таких характеристик, присутствующих в зоне Zr поиска.
Такой этап 110 определения местоположения используется для обеспечения правильного применения цифровой маски Mi для изображения Ii, которое сняли во время этапа 130 обработки. Таким образом, способ, в соответствии с изобретением, состоит в использовании цифровой маски Mi по меньшей мере для одной зоны Zt обработки в изображениях, которые включают в себя, по меньшей мере, видимую структуру 3 для контроля. Зона Zt обработки соответствует зоне Zr поиска или только части зоны Zr поиска или полностью охватывает зону поиска и также продолжается за пределы зоны поиска. Видимая маска Mi, таким образом, содержит определенное количество пикселей, каждый из которых имеет определенный уровень интенсивности (или уровень серого) в пределах его зоны Zt обработки. Подготовка цифровой маски Mi более подробно описана ниже.
Способ, в соответствии с изобретением, затем содержит этап 120, который состоит в применении геометрического преобразования Т таким образом, что во время этапа 130 обработки цифровую маску Mi и зону Zt обработки изображений размещают так, чтобы они совпадали. Следует понимать, что применяемое геометрическое преобразование Т получают из или оно зависит от результата определения местоположения визуальной структуры 3 (или маркера), которое выполняют во время этапа 110.
В примере, показанном на фиг. 3, геометрическое преобразование Т применяют для изображений Ii. При этом возможно предусмотреть воплощение, при котором геометрическое преобразование T применяют для цифровой маски Mi, вместо изображений Ii. Этот этап цифрового преобразования T позволяет сделать так, чтобы пиксели цифровой маски Mi совпадали с или были наложены на пиксели зоны Zt обработки изображений Ii. Таким образом, в общем смысле, пиксели m цифровой маски Mi и пиксели p зоны Zt обработки размещают в общей системе координат X, Y таким образом, что координаты пикселей могут быть записаны соответственно как m (x, y) для цифровой маски Mi и p (x, y) для зоны Zt обработки. Примеры такого геометрического преобразования Т приведены в представленном ниже описании.
Способ, в соответствии с изобретением, затем содержит этап 130 обработки, состоящий в применении обработки изображения для каждого пикселя зоны Zt обработки в изображениях Ii, причем эта обработка зависит от значения интенсивности совпадающего пикселя цифровой маски Mi. Следует учесть, что обработку изображения выполняют для каждого пикселя р (x, y) в зоне Zt обработки изображения, учитывая соответствующий или совпадающий пиксель m (x, y) цифровой маски Mi.
Обработка изображения может содержать, по меньшей мере, этап сравнения пикселей р (x, y) изображения с пикселями m (x, y) цифровой маски Mi или действительное выполнение следующих операций обработки:
- р (x, y) - m (x, y);
- р (x, y)/m (x, y);
- а⋅р (x, y)+b⋅m (x, y), где а и b представляют собой коэффициенты.
Способ, в соответствии с изобретением, затем содержит этап 140, состоящий в анализе результатов этапа обработки для определения, представляет ли контейнер объект, в частности, в зоне Zt обработки.
Способ, в соответствии с изобретением, затем содержит этап 150, состоящий в определении, следует или нет обновить цифровую маску Mi. На этапе 160 способ, в соответствии с изобретением, состоит в обновлении цифровой маски Mi как функции уровней интенсивности пикселей в зоне Zt обработки. Такой этап 160 обновления позволяет, например, используя статистические или математические правила, обеспечить разворачивание цифровой маски Mi в большей или меньшей степени.
Выбор (этап 150), следует или нет модифицировать цифровую маску Mi, может зависеть от разных факторов, таких как рассматриваемое изображение, текущее состояние производства контейнера, например, определяемое по статистическому анализу, и/или более, или менее строгие требования управления качеством. В упрощенном первом варианте изобретения, для каждого инспектируемого контейнера, все изображения непрерывно способствуют развитию цифровой маски. В другом варианте осуществления цифровая маска Mi должна развиваться только в течение ограниченного периода, соответствующего началу производства контейнера. В другом варианте осуществления цифровую маску Mi обновляют, учитывая только изображения контейнеров, которые, вероятно, не содержат каких-либо дефектов. В этом конкретном варианте осуществления цифровую маску Mi модифицируют так, чтобы она стала Mi+1, когда этап анализа определяет, что контейнер 2 не имеет какого-либо дефекта. В таких обстоятельствах цифровую маску Mi модифицируют так, чтобы она содержала пиксель за пикселем по меньшей мере часть значений интенсивности пикселей в зоне Zt обработки. Преимущество составления цифровой маски путем объединения большого количества (несколько десятков) изображений и, таким образом, контейнеров состоит в том, что это позволяет автоматически получить среднее изображение контейнеров, и это среднее изображение можно рассматривать как представляющее собой изображение контейнеров без дефектов, что, таким образом, автоматически формирует локальную переменную, чувствительную к детектированию.
Способ изобретения состоит в обновлении описанных выше этапов обработки для следующего контейнера 2 с цифровой маской Mi+1, которая, вероятно, может быть модифицирована.
Способ изобретения, таким образом, устанавливает принцип детектирования дефектов, который основан на выполнении накопления предварительно обработанных изображений, которые сравнивают с изображением инспектируемого контейнера. Такой принцип детектирования предназначен для устранения информации, которая многократно возникает (тени или структуры), и, таким образом, для получения лучшей чувствительности измерений в зонах обработки, которые нарушаются присутствием визуальных структур, и возможно даже использовать те же критерии детектирования для всей зоны обработки, включая в себя разные визуальные структуры.
Способ, в соответствии с изобретением, таким образом, состоит в подготовке цифровой маски Mi путем:
- учета по меньшей мере одного изображения контейнера 2;
- определения положения и ориентации визуальной структуры 3 (или маркера) в зоне Zr поиска по меньшей мере упомянутого изображения;
- применения геометрического преобразования, которое представляет собой функцию положения и ориентации визуальной структуры 3 маркера либо в отношении зоны Zt обработки упомянутого изображения, или маски так, чтобы поместить зону Zt обработки и цифровую маску в положение, где они совпадают друг с другом; и
- объединения по меньшей мере зоны обработки изображения и цифровой маски для обновления цифровой маски Mi.
Из представленного выше можно видеть, что цифровая маска Mi изготовлена путем объединения зон Zt обработки изображения. В общем, объединение изображения с цифровой маской состоит в модификации значений совпадающих пикселей в цифровой маске. Эта модификация может быть выполнена различными способами, такими как, например систематическая или условная линейная комбинация значений пикселя в цифровой маске и пикселя изображения, с или без порогового значения, учитывая соседние пиксели или группу соседних пикселей.
В варианте воплощения способ состоит в подготовке цифровой маски на этапе инициализации, которая начинается от по меньшей мере одного изображения контейнера, который, в качестве примера, не включает в себя каких-либо дефектов.
Из представленного выше описания можно видеть, что случайные ориентации и расположение контейнеров 2 корректируют так, чтобы пиксели изображений строго совпадали с пикселями цифровой маски. Такое геометрическое преобразование может быть выполнено различными путями.
Когда изображения Ii снимают на донышке 21 контейнера 2 (фиг. 1 и 1А), изображения могут быть исправлены путем выполнения геометрического преобразования для изображения на основе определения угла поворота и сдвига визуальной структуры 3 относительно исходного положения или фиксированной опорной точки.
Когда изображения Ii снимают на стеках контейнера с помощью последовательности камер 6 (фиг. 2, 2А, 2В), геометрическое преобразование изображений позволяет выполнить по меньшей мере одну обработку анаморфоза. Учитывая, что контейнер 2 выполнен в форме тела вращения, каждая камера 6 выполняет обработку анаморфоза таким образом, что все полученные снимки имеют общие опорные рамки для обработки. Расчеты анаморфоза используются для получения представления в плоскости стенки контейнера, которая сама по себе, в общем, является цилиндрической. Способ обеспечивает возможность съемки миниатюрных изображений, получаемых после анаморфоза, которые должны быть составлены так, чтобы обеспечивать разворачиваемое представление всей стенки контейнера (фиг. 2В). После этого становится возможным определить местоположение видимой структуры 3 в одном из составленных миниатюрных изображений, которые были подвергнуты анаморфозу.
В соответствии с предпочтительными характеристиками изобретения способ состоит в формировании этапа фильтрации снятых изображений контейнеров перед выполнением этапа обработки. Таким образом, для улучшения качества снятых изображений может быть предусмотрена коррекция их гистограммы для уменьшения шумов, используя фильтры низкой частоты, или для усиления локального контраста дефектов в изображении, используя фильтры высокой частоты. Такая фильтрация может быть выполнена перед или после этапа геометрического преобразования.
Этот этап фильтрации применяется для изображений, которые учитывают при обновлении цифровой маски.
Изобретение не ограничено примерами, описанными и представленными выше, поскольку различные модификации могут применяться к нему без выхода за пределы его сущности. Изобретение также применяется для анализа инфракрасных изображений, полученных непосредственно по излучению, излучаемому горячими бутылками.
Способ и устройство для обнаружения дефектов в распределении материала прозрачного контейнера
Способ и установка для обнаружения, в частности, преломляющих дефектов
Устройство для измерения толщины стенки емкости
Способ и устройство для измерения вертикальности на сосуде
Устройство контроля размерности сосуда с оптическим обнаружением контакта
Способ и устройство для наблюдения и анализа оптических особенностей стеклянных сосудов
Способ и устройство для обнаружения дефектов в распределении материала прозрачного контейнера
Способ и установка для обнаружения, в частности, преломляющих дефектов
Устройство для измерения толщины стенки емкости
Способ и устройство для измерения вертикальности на сосуде

