Результат интеллектуальной деятельности: ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ
Вид РИД
Изобретение
Изобретение относится к подъемным устройствам специального назначения, в частности, к гидравлическим приводам мобильных установок с подъемной мачтой (качающейся частью).
Известен гидравлический привод по авт. св. SU 1201216 А (В66F 11/04, 1985). Известный гидравлический привод содержит систему управления, установленные на шасси транспортного средства гидродомкраты и насосный агрегат с баком. Насосный агрегат через трехпозиционный гидрораспределитель, напорные и сливные магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра подъема подъемной мачты (качающейся части), включающей рычаги с взаимным шарнирным сочленением, образующие верхнюю и нижнюю секции подъемной мачты. На верхней секции подъемной мачты с возможностью поворота в вертикальной плоскости шарнирно закреплена опорная платформа. Гидроцилиндр подъема шарнирно соединен соответственно со смонтированным на транспортном средстве поворотным основанием и нижней секцией подъемной мачты. Между гидроцилиндром подъема и трехпозиционным гидрораспределителем подключен гидрозамок. Подобный гидравлический привод может быть использован в мобильной установке в качестве гидравлического привода для вывешивания шасси транспортного средства и для подъема подъемной мачты с антенной на заданный уровень по высоте.
Однако известный гидравлический привод имеет ограниченные функциональные возможности. В частности, он не решает задачу обеспечения достаточного точного горизонтирования шасси, что существенно для обеспечения устойчивости мобильной установки в рабочем положении.
Наиболее близким по совокупности существенных признаков с заявляемым изобретением является гидравлический привод мобильной установки с подъемной мачтой (качающейся частью) по патенту RU 2281244 С1 (В66F 11/04, 2006.01i, Н01Q 1/32, 2006.01i, 2006). Известный гидравлический привод мобильной установки (МУ) с качающейся частью (КЧ) содержит систему управления, включающую сигнализаторы давления, датчики продольного и поперечного горизонтирования, установленные на шасси мобильной установки передние и задние гидродомкраты и насосный агрегат с баком, трехпозиционные гидрораспределители с электромагнитным управлением, причем сигнализаторы давления гидравлически связаны с поршневыми полостями гидродомкратов. Насосный агрегат через первый трехпозиционный гидрораспределитель с электромагнитным управлением, напорные и сливные магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра подъема качающейся части (подъемной мачты) и через систему управления - электрически связан с упомянутыми датчиками горизонтирования. Гидроцилиндр подъема качающейся части (КЧ) шарнирно соединен соответственно с основанием, смонтированным на упомянутом шасси, и с КЧ. Подобный гидравлический привод может быть использован в мобильной, например, пусковой установке для вывешиваения шасси и подъема КЧ в вертикальное положение.
Однако известный гидравлический привод не предполагает решения задачи обеспечения достаточно точного горизонтирования и стабильного положения шасси, а также не предполагает возможности достаточно длительное время обеспечивать стабильное положения качающейся части в условиях изменения температуры и ветровых нагрузок.
Задачей настоящего изобретения является создание гидравлического привода мобильной установки с качающейся частью, обеспечивающего достаточно точное горизонтирование и стабильное положение шасси МУ, а также - способного во время дежурства МУ (т.е. в рабочем положении) длительное время обеспечивать стабильное положение качающейся части в вертикальном положении (т.е. поддерживать вертикальность КЧ) независимо от влияния климатической температуры и ветровых нагрузок.
Указанная задача решается благодаря тому, что известный гидравлический привод мобильной установки с качающейся частью, содержащий систему управления, включающую сигнализаторы давления, Датчики продольного и поперечного горизонтирования, установленные на шасси МУ передние и задние гидродомкраты и насосный агрегат с баком, трехпозиционные гидрораспределители с электромагнитным управлением, причем сигнализаторы давления гидравлически связаны с поршневыми полостями гидродомкратов, при этом насосный агрегат через первый трехпозиционный гидрораспределитель с электромагнитным управлением, напорные и сливные магистрали гидравлически связан со штоковой и поршневой полостями гидроцилиндра подъема КЧ и через систему управления - электрически связан с упомянутыми датчиками горизонтирования, согласно изобретению содержит односторонние гидрозамки, соответственно штоковой и поршневой полостей гидроцилиндра подъема КЧ, которые выполнены каждый с возможностью фиксации в открытом положении с помощью соответствующих шариковых замков при подаче управляющего давления от насосного агрегата через первый трехпозиционный гидрораспределитель с электромагнитным управлением. Передние гидродомкраты выполнены с возможностью гидравлического сообщения с насосным агрегатом через второй трехпозиционный гидрораспределитель с электромагнитным управлением, а задние гидродомкраты - через третий и четвертый трехпозиционные гидрораспределители с электромагнитным управлением соответственно. К магистралям, соединяющим поршневые полости гидродомкратов с соответствующими трехпозиционными гидрораспределителями с электромагнитным управлением, подключены сигнализаторы давления и температурные компенсаторы. Температурные компенсаторы гидравлически связаны со штоковыми полостями соответствующих гидродомкратов. Гидродомкраты выполнены каждый с гидровинтовым приводом, включающим гидромотор, кинематически связанный с винтовой парой, выполненной с возможностью обеспечения фиксации гидродомкрата в рабочем положении МУ. Гидромотор имеет возможность гидравлического сообщения с насосным агрегатом через пятый трехпозиционный гидрораспределитель с электромагнитным управлением. При этом гидравлический привод содержит двухпозиционный гидрораспределитель с электромагнитным управлением, через который поршневые полости гидродомкратов дополнительно имеют возможность сообщения с насосным агрегатом через соответствующие блокировочные обратные клапаны и настроенные на определенный расход ограничители расхода. Такое исполнение гидравлического привода мобильной установки позволяет обеспечить стабильное положение установки в рабочем положении. Кроме того, обеспечивается возможность исключения влияния рессор шасси на горизонтирование, что, в конечном счете, повышает стабильность и точность горизонтирования МУ.
В варианте выполнения качающаяся часть выполнена с возможностью установки транспортно-пусковых контейнеров (ТПК). Это расширяет область использования гидравлического привода.
Вместе с этим гидравлический привод содержит установленные на шасси МУ гидромеханические устройства фиксации в транспортировочном положении соответственно КЧ и ТПК. Насосный агрегат имеет возможность гидравлического сообщения с гидроцилиндром подъема КЧ посредством упомянутых устройств фиксации и шестого трехпозиционного гидрораспределителя с электромагнитным управлением. Гидромеханическое устройство фиксации КЧ включает установленные на шасси МУ два гидроцилиндра со стопорами и золотник. Стопора и золотник выполнены с возможностью взаимодействия с КЧ в транспортировочном положении. Гидроцилиндры гидромеханического устройства фиксации КЧ и золотник гидравлически связаны между собой. Гидромеханическое устройство фиксации ТПК включает два двухштоковых гидроцилиндра, штоковые полости которых через соответствующие дроссели, седьмой и восьмой трехпозиционные гидрораспределители с электромагнитным управлением, напорные и сливные магистрали гидравлически связаны с насосным агрегатом. У каждого из двухштоковых гидроцилиндров корпус закреплен на шасси МУ, один шток - кинематически соединен со смонтированным на шасси МУ рычажным механизмом, включающим элементы зацепления, выполненные с возможностью взаимодействия с ответными элементами зацепления ТПК, а другой шток - выполнен с возможностью взаимодействия с соответствующим нажимным клапаном, установленным в напорной магистрали, связывающей гидромеханическое устройство фиксации КЧ с насосным агрегатом. Благодаря такому исполнению подъем КЧ может производиться только после последовательного освобождения от фиксации относительно шасси ТПК и собственно КЧ. Это исключает возможность случайного, несанкционированного подъема КЧ с ТПК, что значительно повышает надежность гидравлического привода.
Кроме того, гидравлический привод содержит гидромеханическое устройство вертикализации КЧ, включающее регулируемый по длине подкос, который состоит из двух шарнирно соединенных частей, которые выполнены с возможностью расположения на одной прямой в рабочем положении МУ. Подкос оснащен устройством сламывания и устройством для регулирования длины, один из концов подкоса шарнирно соединен с шасси МУ, а другой - с КЧ. В плане (т.е. на виде сверху) подкос расположен в вертикальной плоскости, в которой расположена продольная ось гидроцилиндра подъема КЧ. Устройство сламывания включает односторонний гидроцилиндр, корпус которого шарнирно соединен с подкосом, а шток - со смонтированным на подкосе рычажным механизмом, выполненным с возможностью взаимодействия с шасси МУ. Устройство для регулирования длины подкоса включает несамотормозящуюся винтовую передачу с фиксирующей фрикционной муфтой с гидроцилиндром. Упомянутый односторонний гидроцилиндр и гидроцилиндр фиксирующей фрикционной муфты гидравлически связаны с насосным агрегатом посредством девятого трехпозиционного гидрораспределителя с электромагнитным управлением с возможностью управления односторонним гидроцилиндром в одной позиции этого гидрораспределителя и с возможностью управления фиксирующей фрикционной муфтой в другой его позиции. Наличие в гидравлическом приводе гидромеханического устройства вертикализации КЧ позволяет стабилизировать КЧ в рабочем положении, исключив, практически полностью влияние ветровых нагрузок. Вместе с этим наличие регулируемого по длине подкоса (по существу - жесткой тяги) позволяет в рабочем положении КЧ держать односторонние гидрозамки штоковой и поршневой полостей гидроцилиндра подъема КЧ открытыми, что, в свою очередь, снимает влияние на гидравлический привод температурных колебаний, что также способствует стабилизации положения поднятой в рабочее положение КЧ с ТПК.
В последнем варианте выполнения гидравлического привода система управления может включать датчик вертикализации КЧ, который установлен на КЧ и электрически связан с шестым и девятым трехпозиционными гидрораспределителями с электромагнитным управлением.
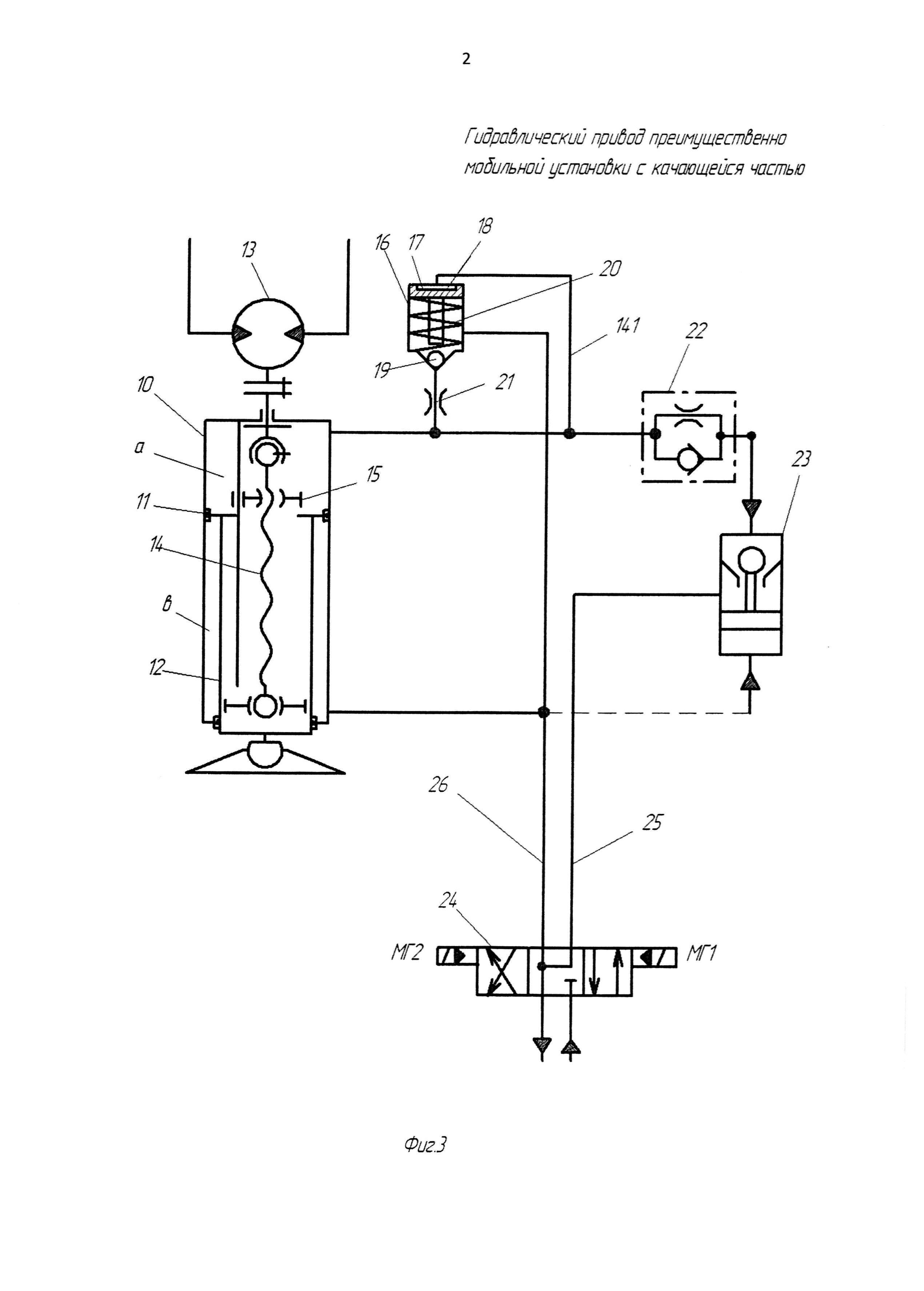
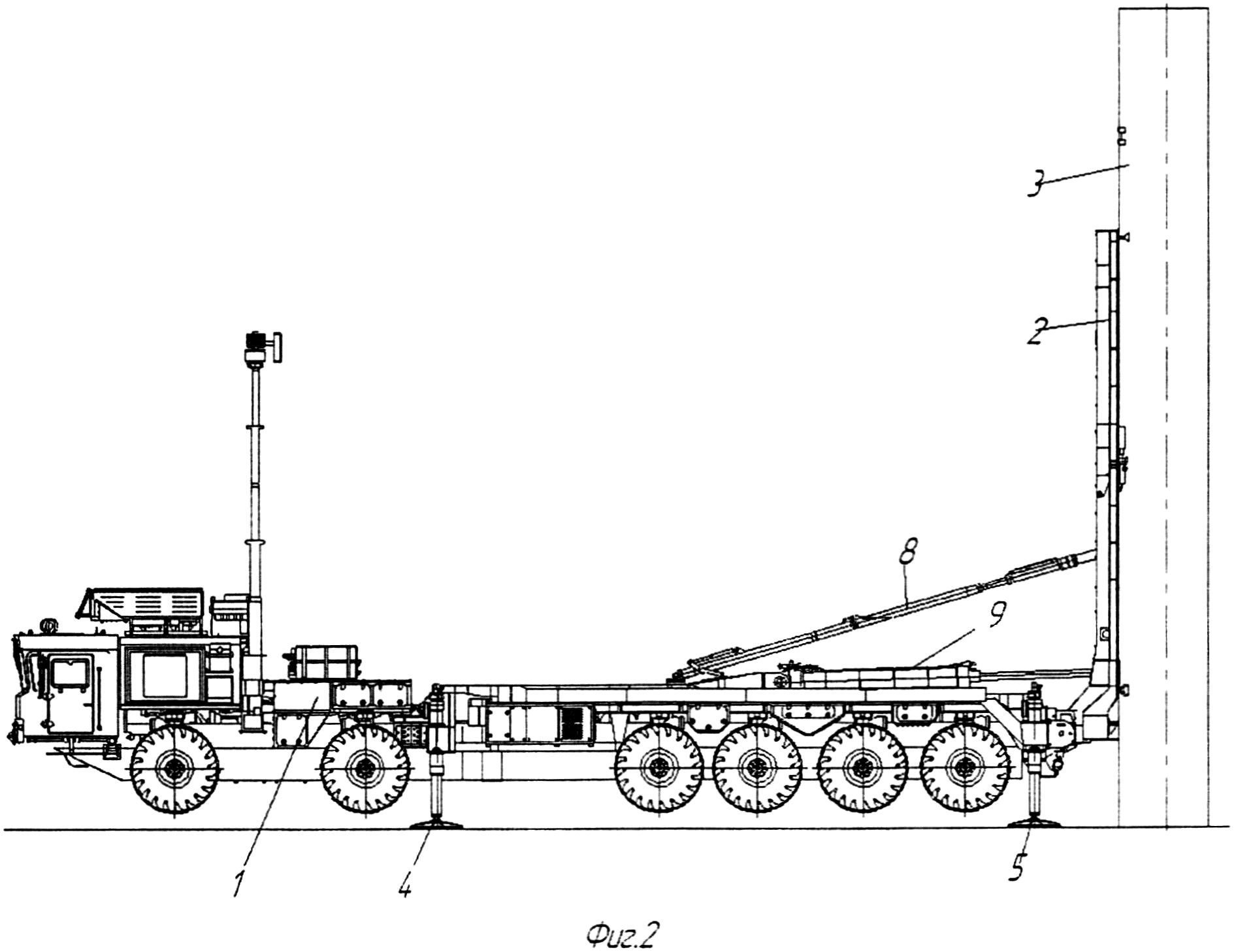
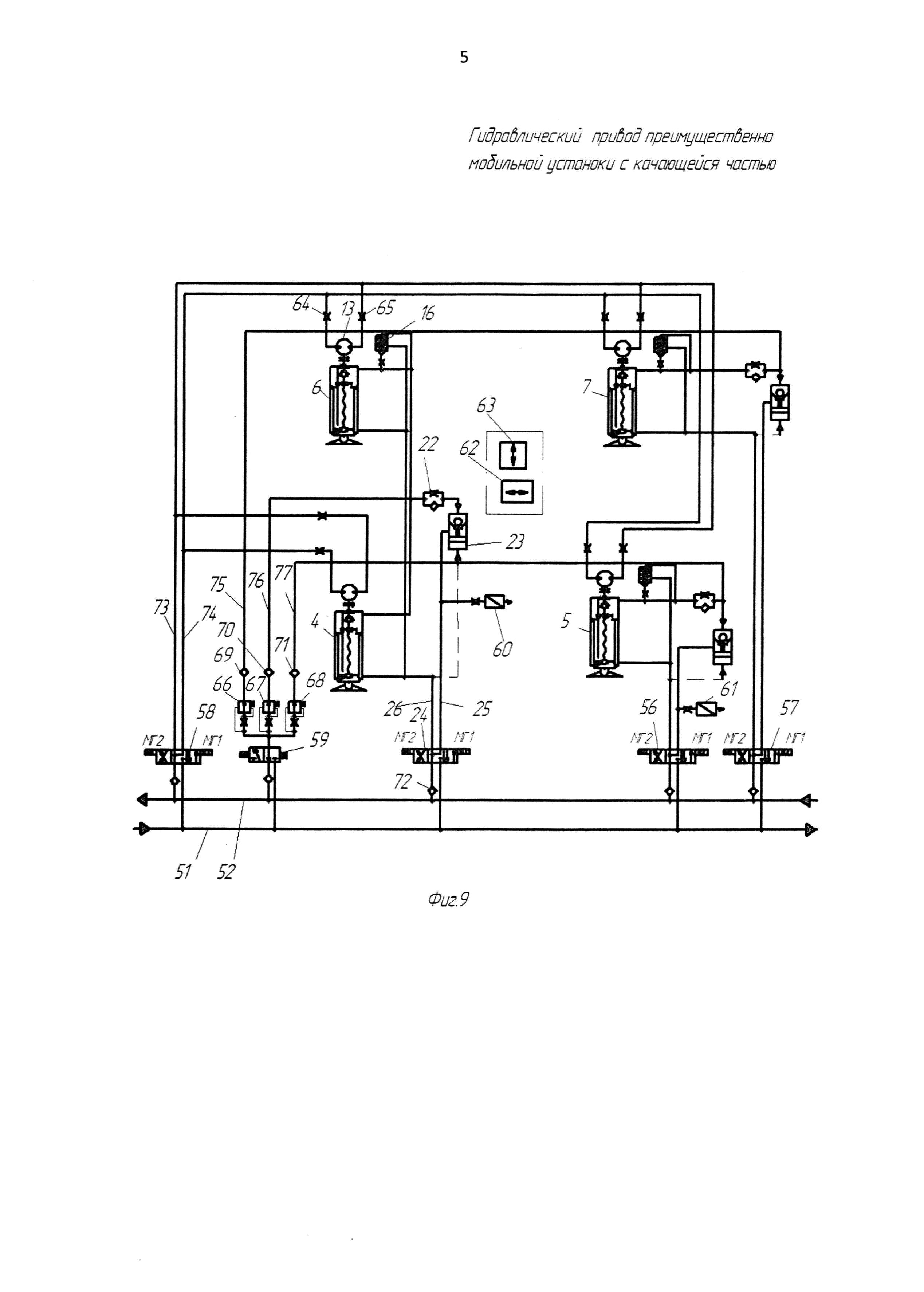
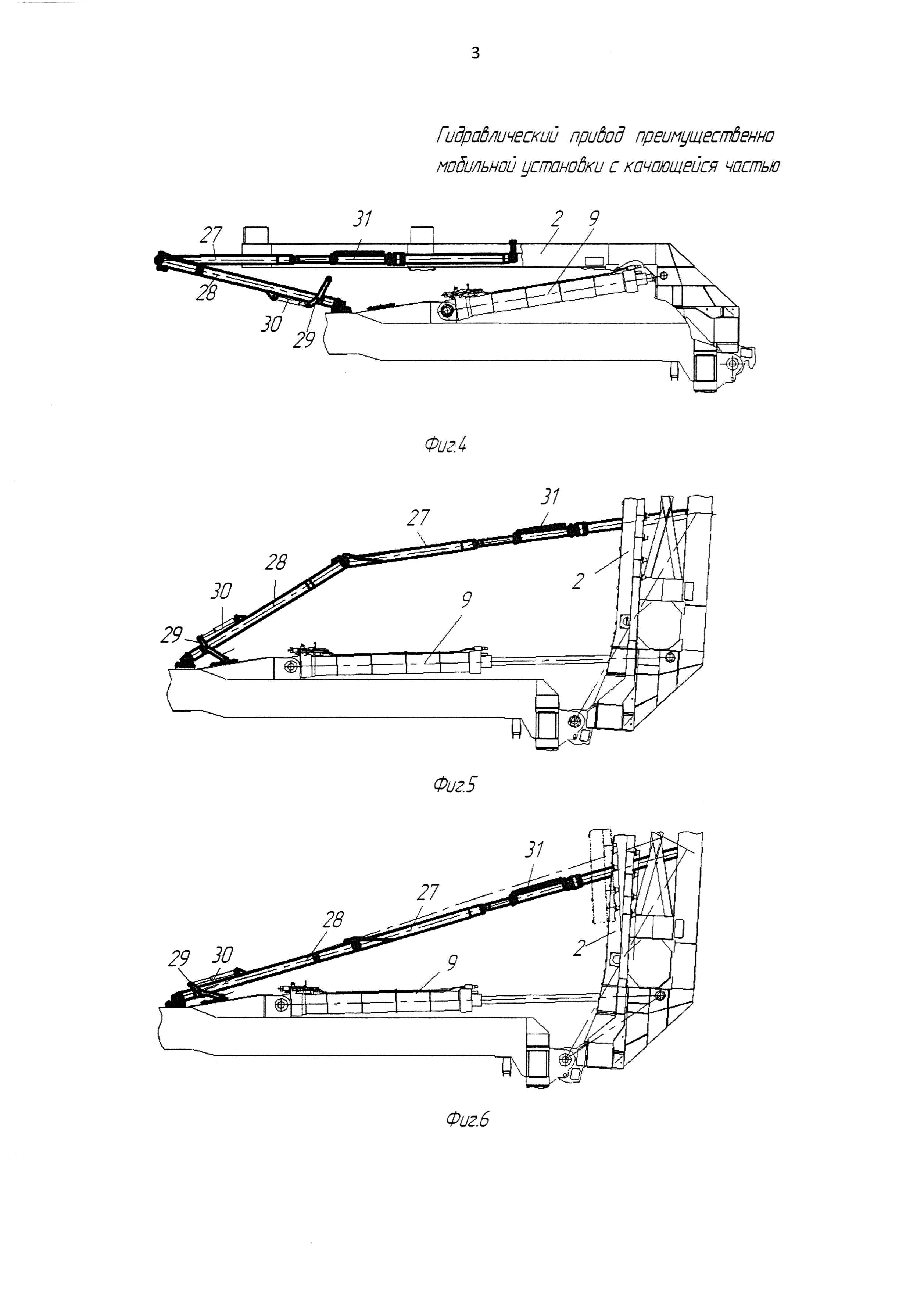
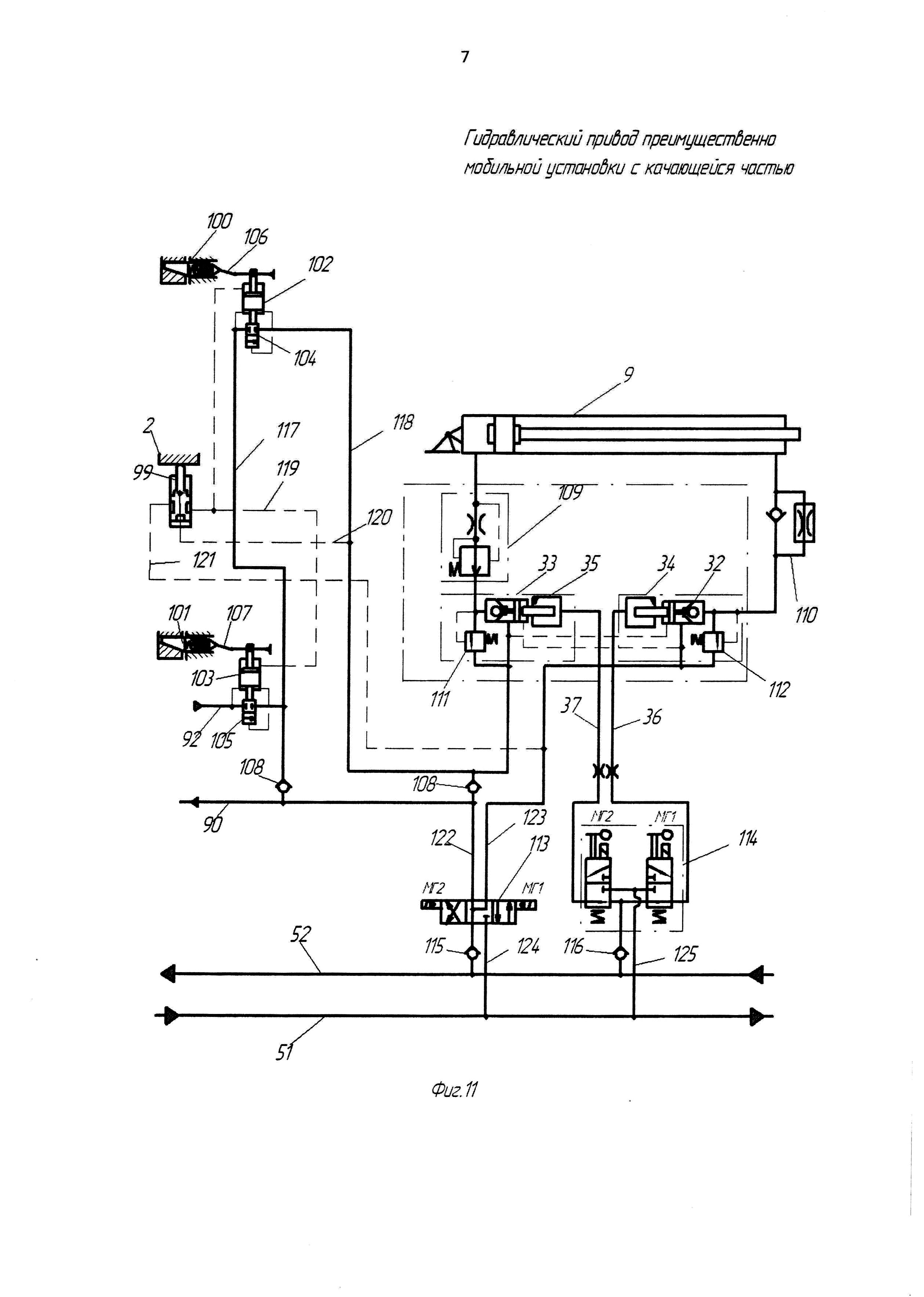
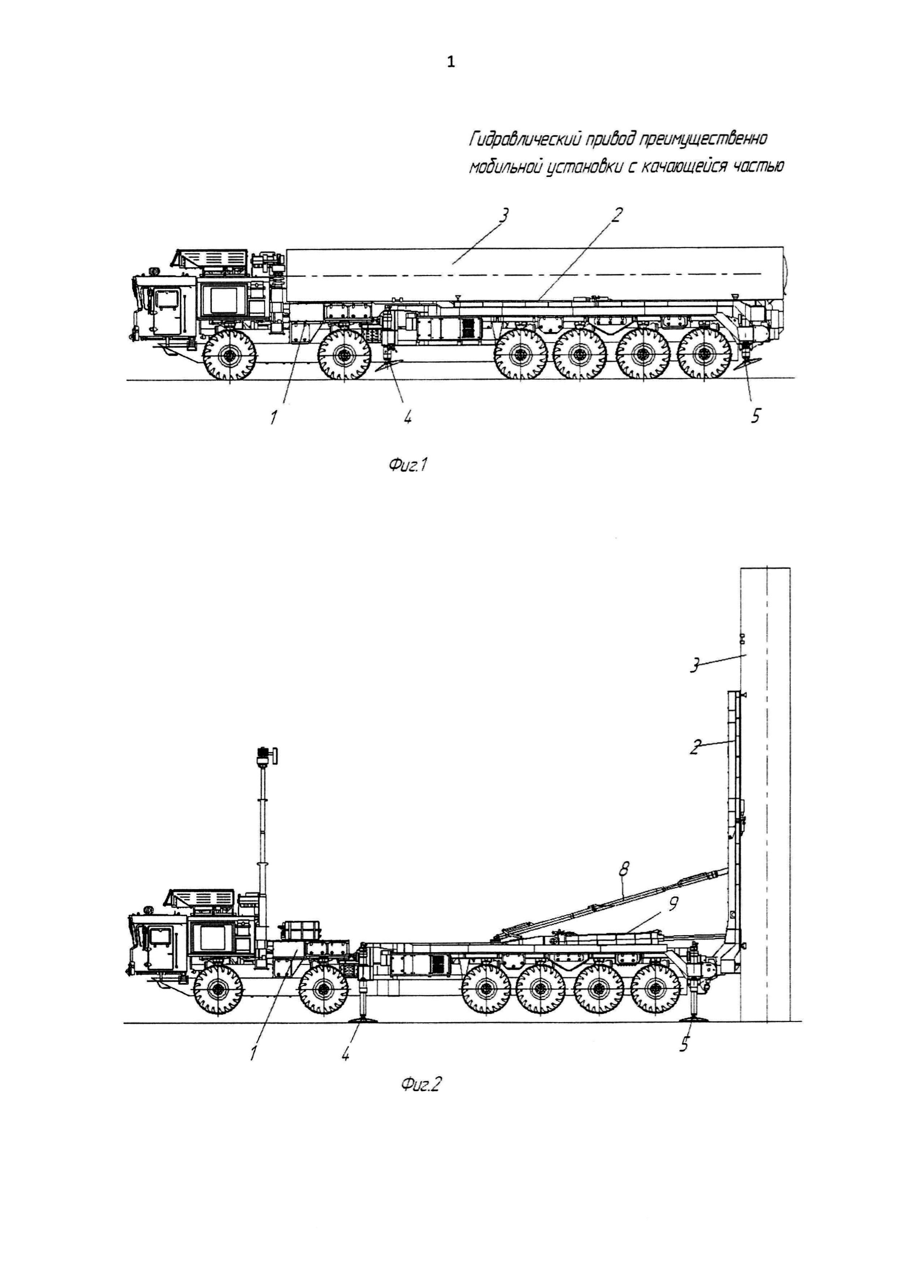
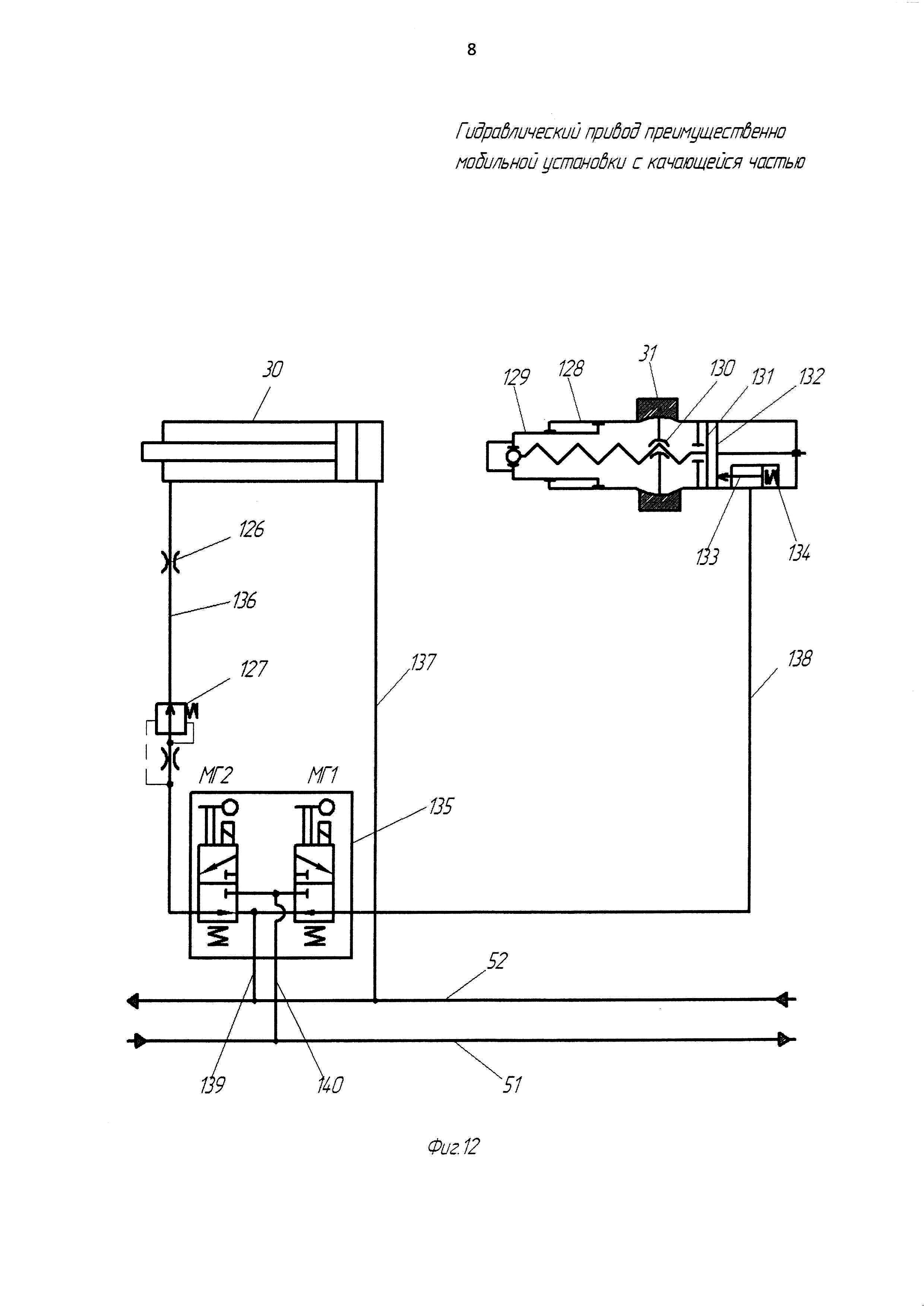
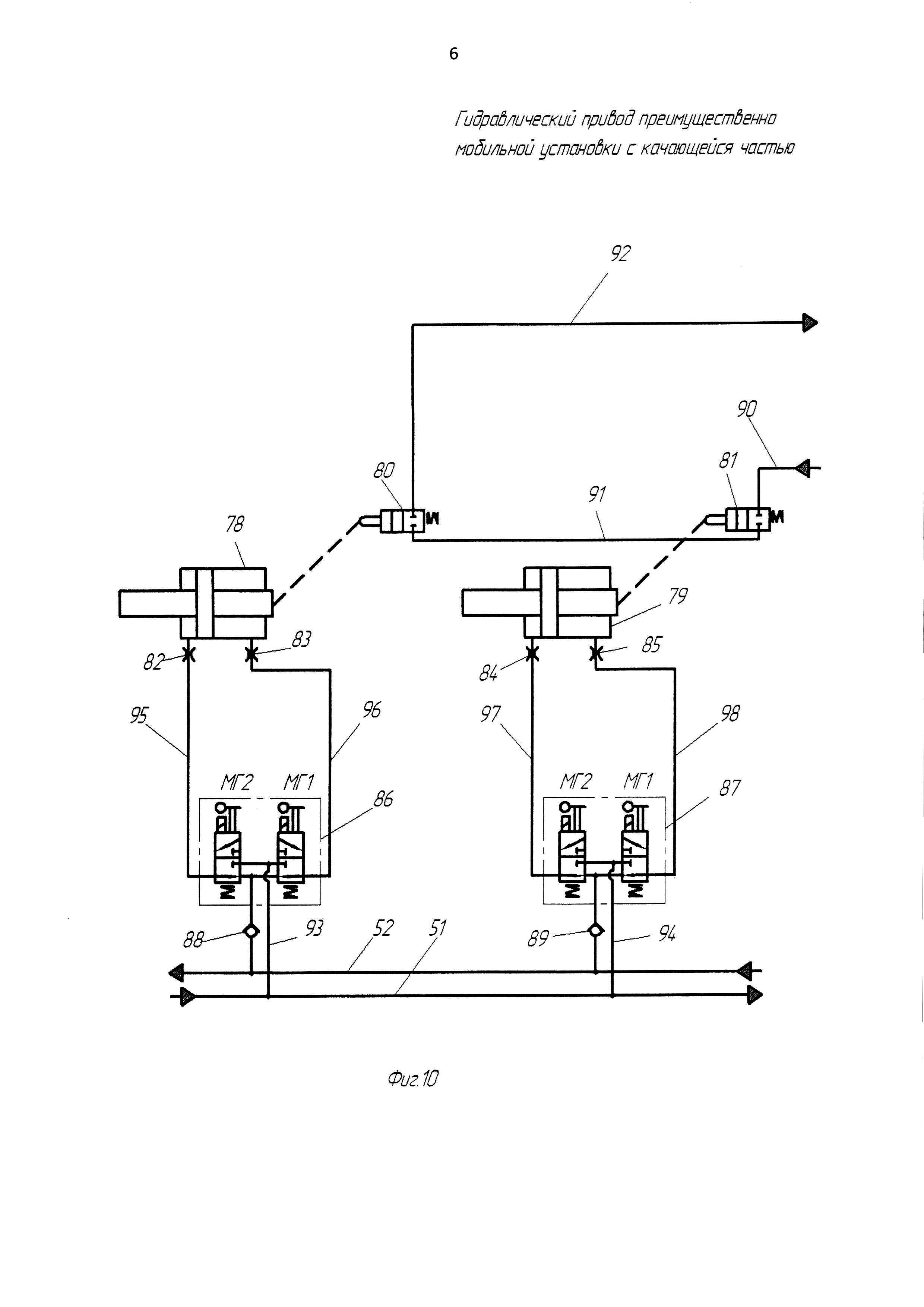
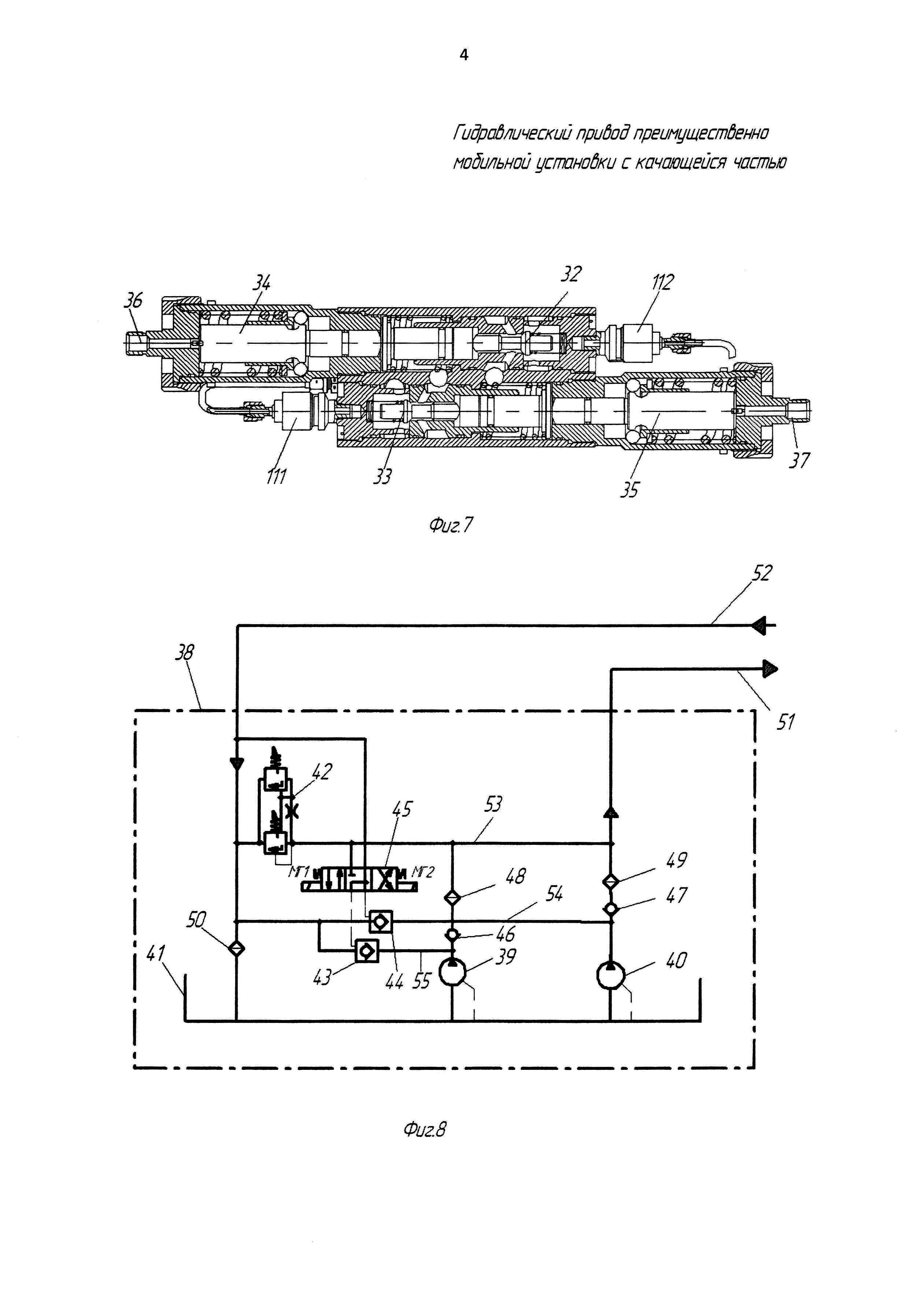
На фиг. 1 схематично показана мобильная пусковая установка (МПУ) с качающейся частью в транспортировочном (походном) положении, общий вид; на фиг. 2 - то же в рабочем положении, МПУ вывешена на гидродомкратах, КЧ с ТПК поднята в вертикальное положение; на фиг. 3 - часть принципиальной схемы гидравлического привода МПУ, включающая гидромотор, кинематически связанный с гидродомкратом, и температурный компенсатор; на фиг. 4 - качающаяся часть и гидромеханическое устройство вертикализации КЧ в транспортировочном (походном) положении, общий вид; на фиг. 5 - то же в промежуточном положении; на фиг. 6 - то же в рабочем положении МПУ; на фиг. 7 - односторонние гидрозамки штоковой и поршневой полостей гидроцилиндра подъема КЧ и их шариковые замки, продольный разрез; на фиг. 8 - часть принципиальной схемы гидравлического привода МПУ, включающая элементы насосного агрегата; на фиг. 9 - часть принципиальной схемы гидравлического привода МПУ, включающая элементы гидросистемы, посредством которых производится вывешивание и горизонтирование МПУ; на фиг. 10 - часть принципиальной схемы гидравлического привода МПУ, включающая элементы гидросистемы, посредством которых производится фиксация ТПК в транспортировочном (походном) положении; на фиг. 11 - часть принципиальной схемы гидравлического привода МПУ, включающая элементы гидросистемы, посредством которых производится подъем и опускание КЧ, и элементы, посредством которых производится фиксация КЧ в транспортировочном (походном) положении; на фиг. 12 - часть принципиальной схемы гидравлического привода МПУ, включающая элементы гидросистемы, посредством которых производится вертикализация КЧ.
В варианте осуществления изобретения гидравлический привод используется в мобильной, например, пусковой установке. МПУ содержит шасси 1 с качающейся частью 2, которая выполнена с возможностью установки, например, двух транспортно-пусковых контейнеров 3. Гидравлический привод МПУ содержит установленные на шасси 1 гидродомкраты 4-7, гидромеханические устройства фиксации в транспортировочном (походном) положении соответственно КЧ 2 и ТПК 3, гидроцилиндр 9 подъема КЧ и гидромеханическое устройство 8 вертикализации КЧ.
Гидродомкраты 4-7 (фиг. 3) выполнены каждый с гидровинтовым приводом. Каждый гидродомкрат имеет корпус 10, поршень 11, шток 12, поршневую «а» и штоковую «b» гидравлические полости, гидромотор 13 и винтовую пару, включающую винт 14 с фиксирующей гайкой 15. Поршневая полость «а» гидродомкрата гидравлически связана с соответствующим температурным компенсатором 16, содержащим поршень 17 со штоком 18, шарик 19 и пружину 20. Каждый гидродомкрат снабжен односторонним гидрозамком 23, гидравлически связанным с поршневой полостью «а» гидродомкрата Режимы работы гидродомкрата обеспечиваются элементами гидросистемы: дросселем 21, обратным клапаном с дросселем 22, односторонним гидрозамком 23, трехпозиционным гидрораспределителем 24 с электромагнитным управлением, а также - посредством магистралей 25, 26 и 141.
Гидравлический привод содержит гидромеханическое устройство вертикализации качающейся части 2 (фиг. 4-6), которое включает регулируемый по длине подкос, состоящий из двух шарнирно соединенных частей 27, 28, которые выполнены с возможностью расположения на одной прямой в рабочем положении МПУ. Подкос оснащен устройством сламывания и устройством 31 для регулирования длины. Один из концов подкоса шарнирно соединен с шасси 1 МПУ, а другой - с качающейся частью 2. В плане (т.е. на виде сверху) подкос расположен в вертикальной плоскости, в которой расположена продольная ось гидроцилиндра 9 подъема КЧ. Устройство сламывания включает смонтированный на подкосе (по существу - на одном из концов части 28 подкоса) рычажный механизм 29, выполненный с возможностью взаимодействия с шасси 1, и односторонний гидроцилиндр 30, корпус которого шарнирно соединен с подкосом (по существу - с частью 28 подкоса), а шток - с рычажным механизмом 29. Скоростной режим работы одностороннего гидроцилиндра 30 (фиг. 12) обеспечивается дросселем 126 при выдвижении штока гидроцилиндра 30 и ограничителем 127 расхода при втягивании штока внутрь этого гидроцилиндра. Устройство 31 для регулирования длины представляет собой телескопическое соединение двух трубных элементов 128, 129, соединенных между собой посредством несамотормозящейся винтовой передачи 130. Последняя выполнена с возможностью фиксации с помощью фрикционной муфты, включающей фрикционные диски 131, 132 и гидроцилиндр 133 с пружиной 134. Односторонний гидроцилиндр 30 и гидроцилиндр 133 фиксирующей фрикционной муфты гидравлически связаны с насосным агрегатом 38 посредством трехпозиционного гидрораспределителя 135 (МГ1, МГ2) с электромагнитным управлением с возможностью управления односторонним гидроцилиндром 30 в одной позиции гидрораспределителя 135 (МГ2) и с возможностью управления фиксирующей фрикционной муфтой в другой его позиции (МГ2). Гидрораспределитель 135 магистралями 51, 52 гидравлически связан с насосным агрегатом 38. К элементам гидросистемы, посредством которых производится вертикализация КЧ, относятся также магистрали 136-140 (фиг. 12). Система управления гидравлического привода включает датчик вертикализации КЧ (на чертеже не показано), который установлен на КЧ и электрически связан с трехпозиционными гидрораспределителями 113, 135 с электромагнитным управлением.
Гидравлический привод содержит односторонние гидрозамки 32 и 33 (фиг. 7) соответственно штоковой и поршневой полостей гидроцилиндра 9 подъема КЧ. Гидрозамки 32 и 33 выполнены каждый с возможностью фиксации в открытом положении с помощью соответствующих шариковых замков 34 и 35 при подаче управляющего давления от установленного на шасси 1 насосного агрегата 38 (фиг. 8) через трехпозиционный гидрораспределитель 45 с электромагнитным управлением. Подача давления на открывание шариковых замков производится подачей давления в каналы 36 и 37. Гидроцилиндр 9 подъема КЧ имеет ограничитель 109 расхода и дроссель 110 с обратным клапаном, которые обеспечивают скоростной режим подъема и опускания гидроцилиндра подъема. Гидроцилиндр подъема также имеет температурные клапаны 111, 112. Управление гидроцилиндром 9 подъема обеспечивается с помощью трехпозиционных гидрораспределителей 113, 114 с электромагнитным управлением, которые имеют блокировочные обратные клапаны 115, 116. Гидрораспределители 113, 114 магистралями 51, 52 гидравлически связаны с насосным агрегатом 38.
В насосном агрегате 38 (фиг. 8) имеются два насоса 39 и 40, бак 41, предохранительный клапан 42, клапаны 43 и 44 разгрузки насосов, трехпозиционный гидрораспределитель 45 с электромагнитным управлением (МГ1, МГ2), обратные клапаны 46, 47 и напорные фильтры 48, 49, установленные в напорных магистралях насосов 39, 40, сливной фильтр 50, напорная магистраль 51, сливная магистраль 52, а также - магистрали 53-55. В качестве трехпозиционного гидрораспределителя 45 с электромагнитным управлением может быть использован, например, гидрораспределитель типа ГА163Т/16, ГА-163Т СТУ (со схемой распределения потока №34).
Вывешивание и горизонтирование МПУ обеспечивается с помощью гидродомкратов 4-7 (фиг. 9). Передние гидродомкраты 4, 6 выполнены с возможностью гидравлического сообщения с насосным агрегатом 38 через трехпозиционный гидрораспределитель 24 с электромагнитным управлением, а задние гидродомкраты 5, 7 - через трехпозиционные гидрораспределители 56, 57 с электромагнитным управлением. Гидравлический привод содержит двухпозиционный гидрораспределитель 59 с электромагнитным управлением, через который поршневые полости «а» гидродомкратов дополнительно имеют возможность сообщения с насосным агрегатом 38 через блокировочные обратные клапаны 69-71 и настроенные на одинаковый расход ограничители 66-68 расхода.
В гидравлическом приводе МПУ принята трехточечная схема вывешивания на гидродомкратах, поэтому управление передними гидродомкратами 4 и 6 осуществляется одним гидрораспределителем 24 общим для этих гидродомкратов. К магистралям, соединяющим поршневые полости «а» гидродомкратов с гидрораспределителями 24, 56, 57, подключены сигнализаторы 60, 61 давления и температурные компенсаторы 16. При этом последние гидравлически связаны со штоковыми полостями «b» соответствующих гидродомкратов. Сигнализаторы 60, 61 давления электрически связаны с системой управления гидравлического привода (на чертеже не показано). Система управления включает установленные на шасси 1 МПУ датчики 62, 63 соответственно продольного и поперечного горизонтирования. Режимы работы гидромоторов 13 обеспечиваются дросселями 64, 65. В гидроприводе имеются блокировочный обратный клапан 72 и магистрали 73-77.
Гидравлический привод содержит установленные на шасси 1 МПУ гидромеханические устройства фиксации в транспортировочном (походном) положении соответственно ТПК и КЧ.
Гидромеханическое устройство фиксации ТПК (фиг. 10) включает два двухштоковых гидроцилиндра 78, 79 (соответственно левого и правого ТПК по ходу движения МПУ), штоковые полости которых через дроссели соответственно 82, 83 и 84, 85 и соответствующие трехпозиционные гидрораспределители 86, 87 с электромагнитным управлением, напорные и сливные магистрали гидравлически связаны с насосным агрегатом 38. Дроссели 82-85 обеспечивают скоростной режим работы гидроцилиндров 78, 79. В качестве трехпозиционных гидрораспределителей 86, 87 могут быть использованы гидрораспределители с электромагнитным управлением типа ГА163Т/16, ГА-163 СТУ. Гидрораспределители 86, 87 снабжены блокировочными обратными клапанами 88, 89 и гидравлически связаны с насосным агрегатом 38 магистралями 51, 52. Посредством магистралей 90, 92 гидромеханическое устройство фиксации ТПК гидравлически связано с гидромеханическим устройством фиксации КЧ. Корпус каждого из двухштоковых гидроцилиндров 78, 79 закреплен на шасси 1 МПУ, один шток - кинематически соединен со смонтированным на шасси 1 МПУ рычажным механизмом, включающим элементы зацепления, выполненные с возможностью взаимодействия с ответными элементами зацепления ТПК (на чертеже не показано), а другой шток - выполнен с возможностью взаимодействия с соответствующим нажимным клапаном 80, 81, установленным в напорной магистрали, связывающей гидромеханическое устройство фиксации КЧ 2 с насосным агрегатом 38 через трехпозиционный гидрораспределитель 113 с электромагнитным управлением. К элементам гидросистемы, посредством которых производится фиксация ТПК в транспортировочном (походном) положении, относятся также магистрали 93-98 (фиг. 10).
Гидромеханическое устройство фиксации в транспортировочном (походном) положении КЧ содержит установленные на шасси 1 МПУ два гидроцилиндра 102, 103 (фиг. 11) со стопорами 100, 101 и золотник 99 (по существу - нажимное золотниковое устройство). Стопора 100, 101 и золотник 99 выполнены с возможностью взаимодействия с КЧ 2 в транспортировочном (походном) положении МПУ. Гидроцилиндры 102, 103 и золотник 99 гидравлически связаны между собой. Гидроцилиндры 102 и 103 снабжены переключающими золотниками соответственно 104 и 105. Штоки гидроцилиндров 102, 103 кинематически связаны со стопорами соответственно 100, 101 посредством рычажных механизмов, включающих шатуны соответственно 106, 107. Гидромеханическое устройство фиксации КЧ также содержит два блокировочных обратных клапана 108.
Благодаря установке гидромеханического устройства фиксации КЧ в магистраль подачи жидкости от насосного агрегата в поршневую полость гидроцилиндра 9 подъема КЧ, подъем КЧ может производиться только после освобождения КЧ от фиксации относительно шасси 1 (т.е. после отстопоривания КЧ). Таким образом, исключается возможность поломки устройства фиксации в случае несанкционированного включения привода подъема КЧ, что повышает надежность.
В гидравлическом приводе имеются также магистрали 117-125 (фиг. 11).
В варианте осуществления изобретения гидравлический привод мобильной пусковой установки работает следующим образом.
На месте развертывания МПУ при переводе ее из транспортировочного (походного) положения в рабочее положение вначале производят вывешивание МПУ. По команде системы управления включают насос 39 (фиг. 8) насосного агрегата 38. Вначале насос работает в режиме разгрузки, и весь расход идет по магистрали 55, через клапан 43 разгрузки, через сливной фильтр 50 в бак 41. Через 3-5 секунд после включения насоса 39 срабатывает реле времени (на чертеже не показано) и по команде системы управления включаются гидрораспределители (фиг. 8, 9) 45 (МГ1), 24 (МГ1), 56 (МГ1), 57 (МГ1).
При этом клапан 43 разгрузки запирается давлением жидкости, поступающей из напорной магистрали 53 через включенный гидрораспределитель 45 (МГ1). Одновременно жидкость от насоса 39 под давлением, определяемым нагрузкой на гидродомкраты 4-7, но не выше давления срабатывания предохранительного клапана 42 насосного агрегата 38 (например, 20 МПа), через обратный клапан 46, напорный фильтр 48, по магистралям 53, 51, через включенные гидрораспределители 24 (МГ1), 56 (МГ1), 57 (МГ1), по магистралям 25 (фиг. 3, 9), открыв односторонние гидрозамки 23, через обратные клапаны с дросселями 22 поступит в поршневые полости «а» гидродомкратов 4-7. В результате этого штоки 12 гидродомкратов 4-7 начнут выдвигаться (по существу - опускаться). Слив рабочей жидкости из штоковых полостей «b» гидродомкратов 4-7 происходит по магистралям 26, через гидрораспределители 24, 56 и 57, обратные клапаны 72, сливную магистраль 52, сливной фильтр 50 в бак 41. При опускании штоков 12 гидродомкратов, после упора опорных тарелей (на чертеже не показано) в грунт, шасси МПУ начинает вывешиваться и его рессоры (на чертеже не показано) начинают частично разжиматься. Таким образом, часть весовой нагрузки МПУ передается на гидродомкраты 4-7, вследствие чего давление в гидросистеме возрастает. Когда давление в гидросистеме достигнет величины срабатывания сигнализаторов 60, 61 давления (например, 5 МПа), по сигналу системы управления происходит отключение гидрораспределителей 24, 56, 57.
Чтобы исключить влияние рессор шасси 1 на последующее горизонтирование СПУ, целесообразно перед горизонтированием несколько приподнять МПУ над рессорами. С этой целью после срабатывания сигнализаторов 60, 61 давления по команде системы управления включается двухпозиционный гидрораспределитель 59 с электронным управлением (гидрораспределитель 45 и насос 39 не выключались). Жидкость под давлением по магистралям 53 и 51 через включенный гидрораспределитель 59 поступит в настроенные на одинаковые расходы ограничители 66-68 расхода. После ограничителей расхода жидкость под давлением равными объемами по магистралям 75-77 через обратные клапаны 69-71 поступит в поршневые полости «а» гидродомкратов 4-7. Штоки всех гидродомкратов выдвинутся на определенную величину (например, 0,20-0,25 м) и приподнимут МПУ над рессорами. Слив рабочей жидкости из штоковых полостей «b» гидродомкратов 4-7 будет осуществляться по магистралям 26, через гидрораспределители 24, 56 и 57, обратные клапаны 72, сливную магистраль 52, сливной фильтр 50 в бак 41. Через 3-5 секунд после включения гидрораспределителя 59 срабатывает реле времени (на чертеже не показано) и по команде системы управления гидрораспределитель 59 отключается.
После вывешивания и подъема на определенную высоту над рессорами шасси, производят горизонтирование МПУ в продольной и поперечной плоскостях. По сигналу датчика 62 продольного горизонтирования и команде системы управления, в зависимости от наклона шасси в сторону передних 4, 6 (по чертежу) или задних 5, 7 гидродомкратов, остаются включенными соответствующие гидрораспределители 24, 56, 57, связанные с гидродомкратами 4, 6 или 5, 7. При этом жидкость в поршневые полости «а» гидродомкратов 4, 6 или 5, 7 будет поступать так же, как и при вывешивании МПУ.
После горизонтирования в продольной плоскости по сигналу датчика 63 поперечного горизонтирования и команде системы управления, в зависимости от направления крена шасси МПУ (на правый или на левый борт, т.е. по чертежу в сторону гидродомкратов 6, 7, или гидродомкратов 4, 5), включают гидрораспределители 24, 56 или 24, 57, гидравлически связанные соответственно с гидродомкратами 4, 5 или 6, 7, и производят поперечное горизонтирование МПУ. После окончания процесса поперечного горизонтирования МПУ по сигналу датчика 63 поперечного горизонтирования и команде системы управления гидрораспределители 24, 56 и 57 отключают.
После горизонтирования МПУ в продольной и поперечной плоскостях, для исключения влияния ветровых нагрузок на МПУ и, как следствие, - возможности нарушения ее горизонтального положения, фиксируют положение гидродомкратов 4-7. С этой целью включают гидрораспределитель 58 (МГ1). Жидкость под давлением от насоса 39 (который не выключался) через гидрораспределитель 58, по магистрали 74 через соответствующие дроссели 65 поступает в гидромоторы 13. Гидромоторы приводят во вращение соответствующие винты 14 (фиг. 3), расположенные в корпусах 10 гидродомкратов 4-7. Посредством вращающихся винтов 14 фиксирующие гайки 15 опускаются на поршни 11 гидродомкратов, фиксируя штоки 12 гидродомкратов в неподвижном положении.
Для исключения возможности нарушения горизонтального положения МПУ вследствие влияния температуры в гидросистеме предусмотрены температурные компенсаторы 16, которые гидравлически связаны с поршневыми «а» и штоковыми «b» полостями гидродомкратов 4-7. При вывешивании и горизонтировании МПУ давление жидкости из поршневой полости «а» гидродомкрата по магистрали 141 будет поступать через дроссель 21 под шарик 19 температурного компенсатора 16 и одновременно - под поршень 17 температурного компенсатора. Поршень 17, который переместится вниз (по чертежу), сжав пружину 20 штоком 15, нажмет на шарик 19 герметично закрыв температурный компенсатор 16. После вывешивания и горизонтирования МПУ шток 12 гидродомкрата фиксируют в неподвижном положении с помощью гидромотора 13 посредством винтовой пары, включающей винт 14 с фиксирующей гайкой 15. При этом снимается нагрузка с поршня 11 гидродомкрата и падает давление в поршневой полости «а». Вследствие этого поршень 17 со штоком 18 под действием пружины 20 поднимется вверх (по чертежу), освободив шарик 19. Таким образом, во время дежурства МПУ (т.е. в рабочем положении) при изменении климатической температуры и расширении рабочей жидкости в поршневой полости «а» гидродомкрата часть жидкости, приподняв шарик 19, по магистрали 26 уйдет в сливную магистраль. Повышения давления в поршневой полости «а» гидродомкрата не будет и нарушения горизонтирования не произойдет.
После вывешивания, горизонтирования МПУ и фиксации положения гидродомкратов 4-7 производят подъем качающейся части с ТПК 3. Перед подъемом КЧ транспортно-пусковые контейнеры и качающуюся часть освобождают от фиксации относительно шасси 1 МПУ. С этой целью включают насос 39 (фиг. 8) насосного агрегата 38. Вначале насос работает в режиме разгрузки. Через 3-5 секунд после включения насоса 39 срабатывает реле времени (на чертеже не показано) и по команде системы управления включаются гидрораспределители (фиг. 11, 10) 45 (МГ1), 86 (МГ2) и 87 (МГ2). Жидкость под давлением от насоса 39 по магистралям 53, 51 через гидрораспределитель 113 (МГ2), по магистралям 122, 90 поступает к нажимному клапану 81. Обратные клапаны 108 (фиг. 11) являются блокировочными и не пропускают жидкость под давлением из магистрали 90 в магистраль 117 до момента, пока не снята фиксация ТПК в транспортировочном положении. После включения гидрораспределителей 86, 87 жидкость под давлением по магистралям 93, 94, 95, 97, через дроссели 82, 84 поступает в левые (по чертежу) полости двухштоковых гидроцилиндров 78, 79. Слив жидкости из правых (по чертежу) полостей гидроцилиндров 78, 79 производится через дроссели 83, 85, по магистралям 96, 98, через блокировочные обратные клапаны 88, 89, по магистрали 52 в бак 41 насосного агрегата. При срабатывании гидроцилиндров 78, 79 элементы зацепления транспортно-пусковых контейнеров освобождаются от элементов зацепления рычажных механизмов, смонтированных на шасси МПУ и соединенных со штоками гидроцилиндров 78, 79. Таким образом, правый и левый ТПК освобождают от фиксации относительно шасси МПУ (т.е. отстопориваются). Одновременно срабатывают нажимные клапаны 80, 81 и жидкость под давлением из магистрали 90 проходит в магистрали 91, 92 и далее - поступает к элементам гидромеханического устройства фиксации КЧ (фиг. 11). При освобождении от фиксации КЧ жидкость под давлением по магистрали 92 поступает в гидроцилиндр 103, например левого, стопора 101. Шток гидроцилиндра 103 воздействует на шатун 107, который производит выдвижение стопора 101 из ответного гнезда. При этом переключающий золотник 105 соединяет магистраль 92 с магистралью 117, по которой давление жидкости поступает к гидроцилиндру, например правого, стопора 100. Шток гидроцилиндра 102 воздействует на шатун 106, который производит выдвижение стопора 100 из ответного гнезда. Таким образом, КЧ освобождается от фиксации относительно шасси (т.е. КЧ отстопоривается). При выдвижении штока гидроцилиндра 102 переключающий золотник 104 соединяет магистраль 117 с магистралью 118 и жидкость под давлением поступает к одностороннему гидрозамку 33 поршневой полости гидроцилиндра 9 подъема КЧ. Далее жидкость под давлением через ограничитель 109 расхода поступает в поршневую полость гидроцилиндра 9 подъема КЧ. Происходит подъем КЧ с ТПК. Слив рабочей жидкости из штоковой полости гидроцилиндра 9 подъема будет осуществляться через дроссель 110 с обратным клапаном, односторонний гидрозамок 32, по магистрали 123, через включенный гидрораспределитель 113 и далее в сливную магистраль 52 насосного агрегата 38 и в бак 41.
Для обеспечения требуемого времени подъема КЧ с ТПК, после освобождения от фиксации (отстопоривания) ТПК и КЧ по команде системы управления в насосном агрегате 38 включается второй насос 40, который, как и насос 39, вначале работает в режиме разгрузки через клапан 44 разгрузки (холостого хода), а через 3-5 сек. после включения гидрораспределителя 45 (МГ2) - подключается к напорной магистрали 51.
Одновременно с подъемом КЧ гидромеханическое устройство вертикализации КЧ автоматически переходит из транспортировочного (походного) положения (фиг. 4) в промежуточное положение (фиг. 5). При этом раздвигаются шарнирно соединенные части 27, 28 подкоса устройства вертикализации. Для перевода гидромеханического устройства вертикализации КЧ из промежуточного положения (фиг. 5) в рабочее положение (фиг. 6) включается гидрораспределитель 135 (МГ1). Жидкость под давлением от насосного агрегата 38 по магистрали 51, через включенный гидрораспределитель 135 (фиг. 12) по магистрали 138 поступает в гидроцилиндр 133 и воздействует на его поршень, который сжимает пружину 134. При этом освобождаются от давления фрикционные диски 131, 132 и несамотормозящаяся винтовая передача 130 устройства 31 для регулирования длины. В результате этого части 27 и 28 подкоса устройства вертикализации опускаются под собственным весом и занимают положение, при котором их продольные оси располагаются на одной прямой. Таким образом, подкос спрямляется. В процессе перемещения частей 27, 28 подкоса рычажный механизм 29 вступает во взаимодействие с шасси 1 и воздействует на шток одностороннего гидроцилиндра 30. Шток выдвигается из гидроцилиндра. Жидкость из штоковой полости вытесняется через дроссель 126 по магистралям 136, 139, 52 в бак насосного агрегата. При изменении взаимного положении частей 27, 28 подкоса за счет относительного взаимного перемещения трубных элементов 128, 129 устройства 31 автоматически происходит компенсация изменения длины подкоса. После этого гидрораспределитель 135 (МГ1) отключается, давление жидкости из гидроцилиндра 133 сбрасывается в сливную магистраль 52, фрикционная муфта фиксирует несамотормозящуюся винтовую передачу 130. В результате этого КЧ с ТПК закрепляется в неподвижном положении.
После подъема производят точную вертикализацию КЧ. По сигналу датчика вертикализации КЧ и команде системы управления (на чертеже не показано) включается гидрораспределитель 113 МГ1 или МГ2 (фиг. 11), в зависимости от требуемого направления перемещения КЧ. Например, включается электромагнит МГ1, тогда жидкость под давлением от насоса 39 по магистрали 51, через включенный гидрораспределитель 113, по магистрали 123, через односторонний гидрозамок 32 поступает в штоковую полость гидроцилиндра 9 подъема. При достижении требуемой точности вертикализации КЧ по сигналу датчика вертикализации гидрораспределитель 113 отключается. При вертикализации КЧ одновременно с гидрораспределителем 113 включается и гидрораспределитель 135 (МГ1) с целью включения в работу устройства 31 для регулирования длины. После завершения вертикализации КЧ гидрораспределители ИЗ и 135 отключают. Таким образом, КЧ с ТПК надежно фиксируют в вертикальном положении.
С целью исключения влияния на вертикализацию КЧ температурных факторов, на период дежурства МПУ открывают односторонние гидрозамки 32, 33 гидроцилиндра 9 подъема КЧ (фиг. 11). В этом случае КЧ удерживается в вертикальном положении с помощью гидромеханического устройства вертикализации КЧ. Открывание односторонних гидрозамков 32, 33 производится включением гидрораспределителя 114 (МГ1, МГ2). Жидкость под давлением от насоса 39 насосного агрегата 38 по магистрали 51 через включенный гидрораспределитель 114 одновременно по каналам 36, 37 поступает в полости шариковых замков 34, 35 (фиг. 7) и открывает односторонние гидрозамки 32, 33. После выключения гидрораспределителя 114 односторонние гидрозамки 32, 33 остаются открытыми, удерживаемыми в этом положении шариковыми замками 34, 35. Исключение влияния температурных факторов (по существу - защиту полостей гидроцилиндра 9 подъема от повышения давления) в случае, когда односторонние гидрозамки 32, 33 закрыты и М ПУ находится не в режиме дежурства, обеспечивают температурные клапаны 111, 112.
При приведении МПУ из рабочего положения в транспортировочное (походное) вначале МПУ переводят в промежуточное положение. Для этого посредством одностороннего гидроцилиндра 30 с помощью рычажного механизма 29 осуществляют сламывание подкоса гидромеханического устройства вертикализации КЧ. С этой целью включается гидрораспределитель 135 (МГ2, МГ1). Жидкость под давлением от насоса 39 по магистралям 51, 140, через гидрораспределитель 135, ограничитель 127 расхода, по магистрали 136, через дроссель 126 поступает в штоковую полость одностороннего гидроцилиндра 30. Шток гидроцилиндра 30, втягиваясь внутрь гидроцилиндра, с помощью рычажного механизма 29 сламывает подкос и приводит части 28, 27 подкоса в промежуточное положение. Одновременно включением гидрораспределителя 135 (МГ1) приводится в действие устройство 31 для регулирования длины, работа которого была описана выше. После сламывания подкоса производят опускание КЧ в транспортировочное положение. Работа гидравлического привода при опускании КЧ отличается от работы гидравлического привода при подъеме КЧ в рабочее положение лишь тем, что вместо включения электромагнита МГ2 гидрораспределителя 113 (фиг. 11) включается электромагнит МГ1. После опускания КЧ производится подъем гидродомкратов 4-7 (фиг. 3) в транспортировочное положение. В первоначальный момент производится подъем гаек 15, фиксирующих поршни 11 гидродомкратов в выдвинутом положении. С той целью включается гидрораспределитель 58 (МГ2). При этом жидкость под давлением от насоса 39 из магистрали 51, через включенный гидрораспределитель 58, по магистрали 74, через дроссели 64 поступает в гидромоторы 13, которые вращают винты 14, посредством которых фиксирующие гайки 15 поднимаются вверх. После подъема гаек 15 производится подъем штоков 12 гидродомкратов в транспортировочное положение. Работа гидравлического привода при подъеме штоков 12 отличается от работы гидравлического привода при их опускании лишь тем, что у гидрораспределителей 24, 56 и 57 вместо электромагнитов МГ1 включают электромагниты МГ2.
Благодаря выполнению гидродомкратов 4-7 с гидровинтовым приводом, включающим гидромотор 13, кинематически связанный с винтовой парой, выполненной с возможностью фиксации гидродомкрата в выдвинутом рабочем положении, также - наличию температурных компенсаторов 16, гидравлически связанных с поршневыми «а» и штоковыми «b» полостями соответствующих гидродомкратов, и - исключению влияния на вертикализацию КЧ (в рабочем положении установки) температурных факторов за счет использования в гидроцилиндре 9 подъема КЧ односторонних гидрозамков 32, 33 с шариковыми замками 34, 35 обеспечивается стабильное положение мобильной пусковой установки при длительном дежурстве (т.е. в рабочем положении). Обеспечение подачи в поршневые полости «а» гидродомкратов 4-7 равных определенных объемов рабочей жидкости при вывешивании мобильной установки позволяет приподнять шасси 1 установки над рессорами, что исключает влияние рессор на горизонтирование и, в конечном счете, повышает стабильность и точность горизонтирования МПУ.
Благодаря установке гидромеханических устройств фиксации транспортировочного положения ТПК и КЧ в магистраль подачи жидкости от насосного агрегата 38 в поршневую полость гидроцилиндра 9 подъема КЧ обеспечивается последовательность: сначала - отстопоривание ТПК, после этого - отстопоривание КЧ, а затем - подъем КЧ. Это исключает возможность случайного, несанкционированного подъема КЧ с ТПК, что значительно повышает надежность гидравлического привода.
Наличие в гидравлическом приводе гидромеханического устройства 8 вертикализации КЧ позволяет стабилизировать КЧ в рабочем положении, исключив, практически полностью влияние ветровых нагрузок.
Таким образом, благодаря особенности исполнения гидравлического привода мобильной установки с качающейся частью, изобретение позволяет обеспечить расширение функциональных возможностей и надежности гидравлического привода.
Универсальная мобильная авиационная система беспилотных летательных аппаратов
Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки
Способ оценки точности геометрической модели местности при ее автоматическом построении
Способ идентификации космических объектов искусственного происхождения в космическом пространстве
Вероятностная спутниковая система для мониторинга лесных пожаров
Способ заряда литий-ионной аккумуляторной батареи
Способ контроля герметичности корпуса космического аппарата
Способ территориального размещения мобильных командно-измерительных приёмопередающих станций
Способ и устройство для калибровки приемно-передающей активной фазированной антенной решетки
Регулятор давления
Способ питания импульсной нагрузки от источника переменного напряжения и устройства для его осуществления (варианты)
Универсальная мобильная авиационная система беспилотных летательных аппаратов
Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки
Способ оценки точности геометрической модели местности при ее автоматическом построении
Способ идентификации космических объектов искусственного происхождения в космическом пространстве
Вероятностная спутниковая система для мониторинга лесных пожаров
Способ вертикальной динамической балансировки изделия
Способ производства ферментированного напитка
Гидравлический привод преимущественно мобильной антенной установки с подъемной мачтой
Гидравлический привод люкового закрытия

