Результат интеллектуальной деятельности: СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ ПРИ ПОМОЩИ СИГНАЛОВ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ
Вид РИД
Изобретение
Изобретение относится к радионавигации, предназначено для повышения точности определения координат объектов в условиях плотной городской застройки и в гористой местности.
Суть способа заключается в повышении точности местоопредления с использованием сигналов глобальных спутниковых навигационных систем с помощью учета сигналов с прямой и непрямой линии видимости в условиях городской застройки и гористой местности.
Для реализации способа предложен алгоритм, который состоит из автономного этапа (1 фиг. 1) и активного этапа (2 фиг. 1).
В автономной фазе формируются границы зданий на сетки местоположений. Граница зданий строится с перспективы положения ГНСС пользователя, край здания определяется для каждого азимута (от 0 до 360°) в виде серии углов. Результат этого этапа показывает, где расположены края зданий в пределах небесной координатной сетки. Как только определена граница относительно небесной координатной сетки, она может быть сохранена и легко повторно использована в онлайн фазе для предсказания видимости спутника простым сравнением высоты спутника с высотой здания в том же азимуте. Кроме того, на данном шаге сохраняются последние доступные данные, полученные с помощью стандартного позиционирования (SPP). Данная информация необходима для получения эфемерид ГЛОНАСС и GPS, определения пространства, в котором необходимо производить поиск решения навигационной задачи.
В активной фазе поиска решения из 3D модели города (А фиг. 1) выгружаются здания на небесную координатную сетку (Е фиг. 1). Данные границы позволяют уменьшить область поиска решения навигационной задачи, так как принимается, что пользователь находится на улице (Д фиг. 1)
На первом шаге активной фазы поиска решения определяется область, в которой находятся вероятные решения местоположения в затененной области (Ж фиг. 1). Область поиска определяется на основе первоначального положения, генерируемого на первом шаге определения координат на ЛПВ спутниках (Б, В фиг. 1). Простейшей реализацией является фиксированная окружность с центром в известной координате, однако здесь могут применятся и более совершенные алгоритмы позиционирования (З фиг. 1).
Например, если исходное положение генерируется с использованием обычного решения ГНСС, геометрия сигнала и, следовательно, точность позиционирования будут намного лучше вдоль направления улицы, чем через улицу. Связано это с влиянием городского ландшафта на геометрию распространения сигнала. Сигналы, идущие перпендикулярно улице, имеют больше шансов быть заблокированными, чем сигналы, идущие вдоль улицы. Таким образом, традиционное решение GNSS имеет меньшую точность перпендикулярно улице и более высокую точность вдоль улицы, таким образом можно дополнить алгоритм поиска в затененной области.
На втором шаге полученная область разбивается на сетку, в узлах которой находятся предполагаемые решения навигационной задачи (И фиг. 1). Параметры шага определяются настройками пользователя в зависимости от требуемой точности решения. Однако они ограничены вычислительными возможностями техники по отношению к скорости решения навигационной задачи. В результате данного этапа получается матрица с возможными решениями навигационной задачи (кандидат-решениями) (К фиг. 1).
На третьем шаге осуществляется сравнение высоты спутника вероятной позиции с высотой границы зданий в том же азимуте (Л фиг. 1). Спутник будет виден, если он находится над границей определенного известного здания. Таким образом, получается конфигурация видимых и невидимых спутников для каждого кандидат-решения (Н фиг. 1).
На четвертом шаге оценивается сходство между прогнозируемой видимостью (Л фиг. 1) и фактически наблюдаемой (М фиг. 1). Кандидат позиции с лучшим совпадением будет взвешиваться выше в решении при затененной задаче (О фиг. 1). Существуют два этапа вычисления оценки для кандидата позиции. Во-первых, определение по оценочным схемам о наблюдаемом угле. Во-вторых, функция оценки выдает положение между наблюдаемым сигналом и его оценкой. Она описывается формулой 1.

где  - оценка позиции для точки сетки j,
- оценка позиции для точки сетки j,
 - оценка положения спутника i в сетке
- оценка положения спутника i в сетке  с помощью оценочной матрицы SS.
с помощью оценочной матрицы SS.
К концу этого этапа каждый кандидат положения должен иметь оценку, которая представляет угол, который указывает на видимость спутника, и, следовательно, насколько высока вероятность того, что данный кандидат позиции близок решению навигационной задачи (П фиг. 1). После определения конфигурации и оценки видимых спутников производится оценка невидимых спутников для каждого узла кандидата в решении навигационной задачи. Согласно получаемой конфигурации данных ГНСС возможно определить невидимые спутники для уже определенных высот.
Последний шаг в решении затененной навигационной задачи - определение положения с помощью полученных балльных оценок (Р фиг. 1). На этом шаге у каждого кандидат-решения присутствуют две матрицы с видимой и невидимой конфигурацией спутников для каждой из систем спутниковой навигации. Кроме того, присутствует реально наблюдаемая конфигурация видимых и невидимых спутников. В области поиска решения навигационной задачи определяются кандидаты с наибольшим совпадением предсказанной видимости спутников и реально наблюдаемой. Среди данных кандидат-решений выбирается решение навигационной задачи. Для этого используется метод соседних k-решений для определения местоположения путем усреднения максимальных значений в сетках позиционирования. При такой системе оценки баллы принимают целые или полуцелые значения. Таким образом, несколько точек сетки обычно разделяются высоким баллом. Точки сетки с наивысшими баллами считаются ближайшими соседями. Для вычисления координат для L ближайших соседей используются формулы (2) и (3)


где N, E - координаты приемника,
ni и еi - координаты точек сетки с наивысшей i оценкой позиции.
Способ местоопределения подвижных и неподвижных объектов при помощи сигналов глобальных навигационных спутниковых систем, отличающийся тем, что повышается точность позиционирования за счет учета сигналов спутников с прямой и непрямой линии видимости; при этом в предложенном способе учитываются конфигурации видимых и невидимых спутников для поиска возможных кандидат-решений с учетом ландшафта местности; данный способ состоит из автономной и активной фазы; на автономном этапе формируются границы зданий на сетки местоположений; в активной фазе определяется область, в которой находятся вероятные решения местоположения в затененной области, причем область поиска определяется на основе первоначального положения, генерируемого на первом шаге определения координат на ЛПВ (линия прямой видимости) спутниках; на третьем шаге осуществляется сравнение высоты спутника вероятной позиции с высотой границы зданий в том же азимуте; на четвертом шаге оценивается сходство между прогнозируемой видимостью и фактически наблюдаемой таким образом, что находится кандидат-решение с лучшей геопозицией, которая описывается формулой: , где - оценка позиции для точки сетки j, - оценка положения спутника i в сетке j с помощью оценочной матрицы SS; после определения конфигурации и оценки видимых спутников производится оценка невидимых спутников для каждого узла-кандидата в решении навигационной задачи; и последний шаг в решении навигационной задачи: определение положения с помощью полученных балльных оценок путем сопоставления их оценок.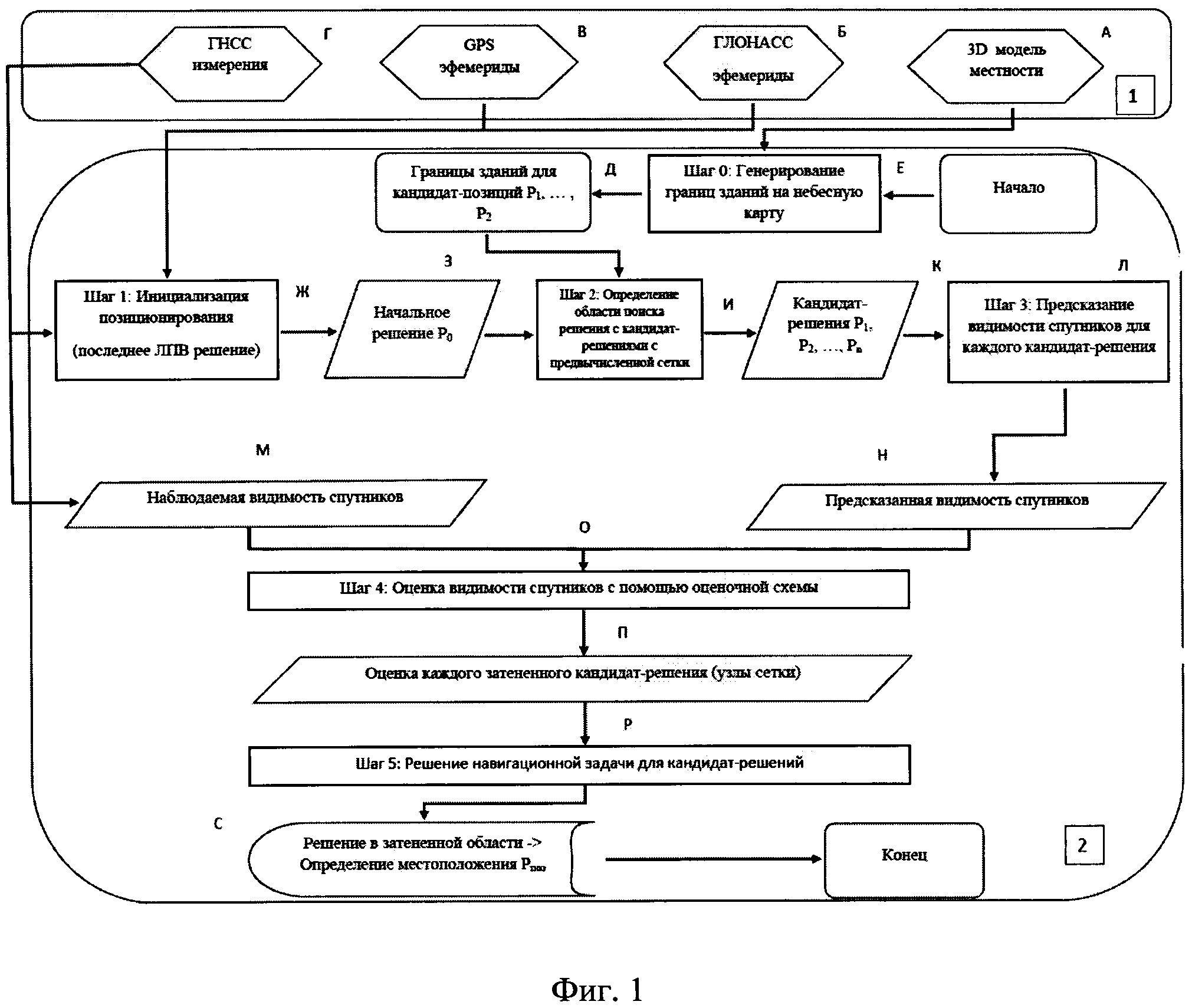




Способ отбора для занятий игровыми видами спорта
Цифровой синтезатор частот с высокой линейностью закона изменения частоты
Способ определения асимметрии зрительного восприятия движущихся объектов
Цифроаналоговый синтезатор сложных частотно-модулированных сигналов
Способ оценки способности восприятия расстояния и пространства человеком
Способ отбора лиц по разрешающей способности зрительных событий во времени
Цифровой вычислительный синтезатор с подавлением перекрестных помех
Аппаратно-программный радиокомплекс для дистанционного зондирования атмосферы

