Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ МОДЕЛИ В РАБОЧЕЙ ЧАСТИ АЭРОДИНАМИЧЕСКОЙ ТРУБЫ
Вид РИД
Изобретение
Изобретение относится к экспериментальной аэродинамике, в частности к устройствам для изменения положения испытываемой модели в рабочей части аэродинамической трубы.
Известны устройства для изменения положения модели в рабочей части аэродинамической трубы, содержащие узел крепления державки для установки модели, который посредством пилона соединен с кареткой, взаимодействующей с приводом и направляющими в виде сегмента окружности, обеспечивающими перемещение каретки и поворот державки модели в требуемом диапазоне углов в вертикальной плоскости - плоскости углов атаки модели α, причем указанные направляющие снабжены дополнительными приводами и направляющими для обеспечения продольного (по направлению потока - оси x) и вертикального (по оси y) перемещений пилона и державки модели и их поворота вокруг вертикальной оси - в плоскости углов скольжения β (см., например, В.А. Козловский, А.П. Косенко, В.И. Лагутин и др. Модернизация трансзвуковой аэродинамической трубы переменной плотности У-21. Космонавтика и ракетостроение, ЦНИИмаш, 2016, вып. 5 (90)).
Недостатком устройств такого типа является их сложность, громоздкость и значительная масса. Кроме того, задание углов β путем поворота пилона вокруг вертикальной оси приводит к нежелательному дополнительному загромождению потока в рабочей части аэродинамической трубы.
Известно устройство для изменения положения модели в рабочей части аэродинамической трубы (см. авт. свид. №636952, 1977 г., МПК G01M 9/00), выбранное в качестве прототипа и содержащее узел крепления державки для установки модели и три стойки, соединенные с одной стороны с шарнирами, установленными в двух точках, разнесенных по длине узла крепления державки, а с другой стороны - с тремя шарнирами, установленными на ползунах, размещенных на закрепленной в рабочей части продольной направляющей и взаимодействующих с автономными приводами.
Устройство обладает небольшой массой и обеспечивает изменение положений модели по осям x, y и углу атаки α.
Его недостатком является малая жесткость устройства в боковом (нормальном к плоскости углов атаки модели) и вертикальном направлениях (при больших углах атаки модели, когда точка крайнего шарнира на узле крепления державки значительно отклоняется от среднего положения и требуется значительное удлинение или укорочение связанных с этой точкой стоек (в зависимости от направления угла атаки α), приводящее к снижению жесткости. Кроме того, в этом устройстве не обеспечена возможность изменения положения модели по углу скольжения β.
Задачами, на решение которых направлено данное предложение, являются повышение жесткости устройства для задания положения модели в рабочей части аэродинамической трубы (и точности позиционирования модели) и расширение его функциональных возможностей.
Технический результат, который достигается данным предложением, заключается в создании простого в управлении механизма повышенной жесткости, обеспечивающего задание испытываемой модели в рабочей части аэродинамической трубы линейных положений по вертикальной y и продольной x осям и угловых положений по углам атаки α и крена ϕ (эквивалентных требуемым угловым положениям по углам атаки α и скольжения β и не связанных с дополнительным загромождением потока в рабочей части аэродинамической трубы).
Этот результат достигается тем, что известное устройство, выбранное в качестве прототипа и содержащее узел крепления державки для установки модели и три стойки, соединенные с одной стороны с шарнирами, установленными в двух точках, разнесенных по длине узла крепления державки, а с другой стороны - с тремя шарнирами, установленными на ползунах, размещенных на закрепленной в рабочей части продольной направляющей и взаимодействующих с автономными приводами, снабжено дополнительной направляющей, установленной в рабочей части симметрично относительно вертикальной плоскости к основной, с дополнительными тремя ползунами и установленными на них дополнительными шарнирами, дополнительными шарнирами в двух точках на узле крепления державки, симметричными относительно вертикальной плоскости к основным, и дополнительными тремя стойками, соединяющими соответствующие дополнительные шарниры на узле крепления державки и ползунах, при этом соответствующие пары основных и дополнительных ползунов соединены перпендикулярными к вертикальной плоскости каретками, взаимодействующими с автономными приводами, основной и дополнительный шарниры, размещенные на хвостовой части узла крепления державки, смещены по вертикали относительно продольной оси узла крепления державки на расстояние, соответствующее ее максимальному повороту в вертикальной плоскости, части стоек, размещаемые в потоке аэродинамической трубы, выполнены обтекаемой формы, а части стоек, находящиеся вне потока и размещенные на одинаковых каретках, соединены перемычками.
В варианте исполнения устройства части стоек, находящиеся вне потока, размещены в плоскостях, параллельных вертикальной, выполнены с возможностью изменения длины относительно шарниров, установленных на ползунах, и снабжены механизмами с приводами, обеспечивающими такое изменение длины.
В дополнительном варианте этот результат достигается тем, что державка соединена с узлом ее крепления с возможностью поворота державки и модели вокруг продольной оси и снабжена механизмом такого поворота.
Сущность предложения заключается в обеспечении повышенной боковой жесткости за счет введения дополнительных стоек и образования управляемой жесткой структуры ферменного типа. При этом конструкция - легкая и простая, а обеспечение расширения функциональных возможностей устройства путем введения механизма задания угла крена модели не связано с дополнительным загроможденим потока в рабочей части аэродинамической трубы.
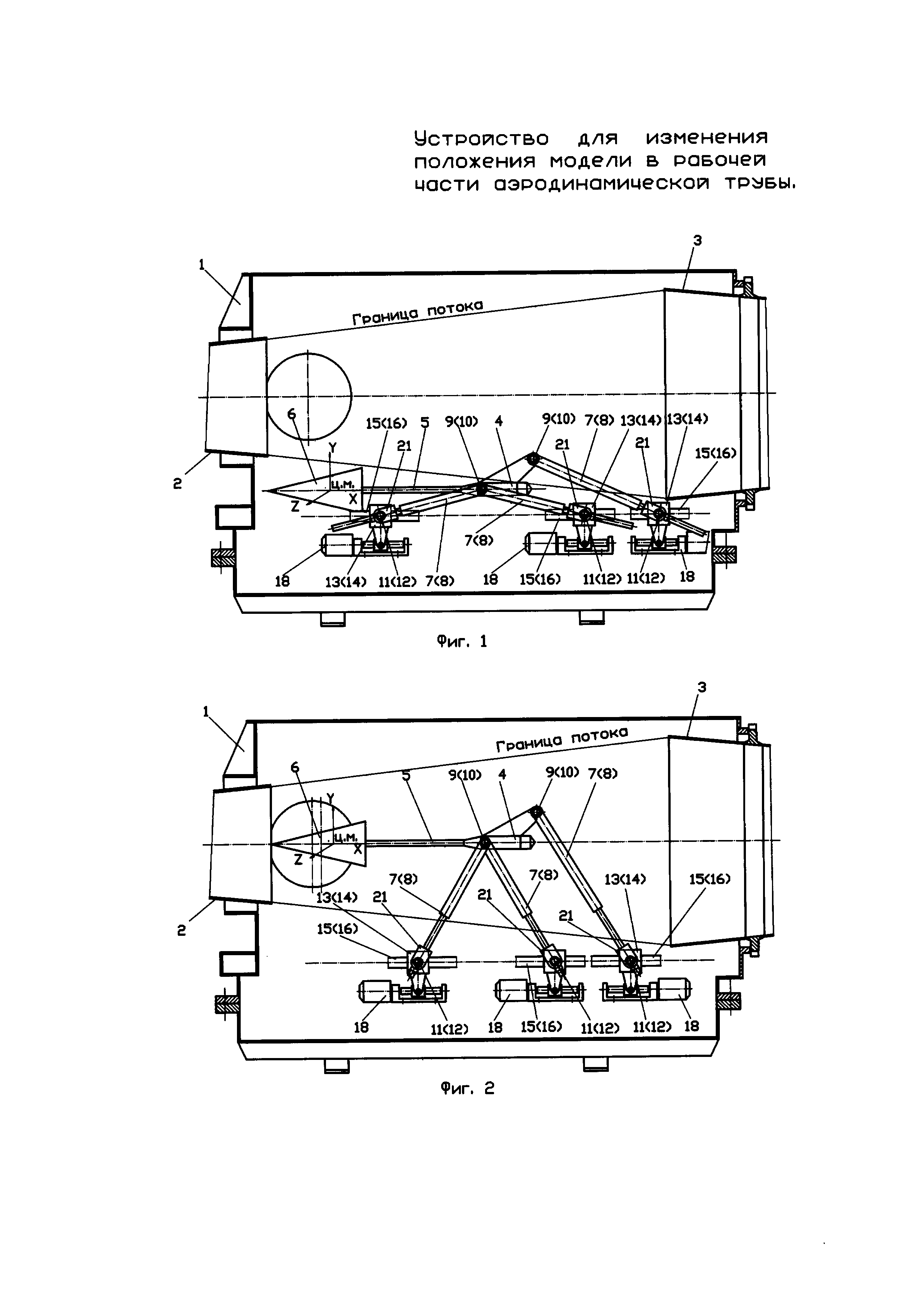
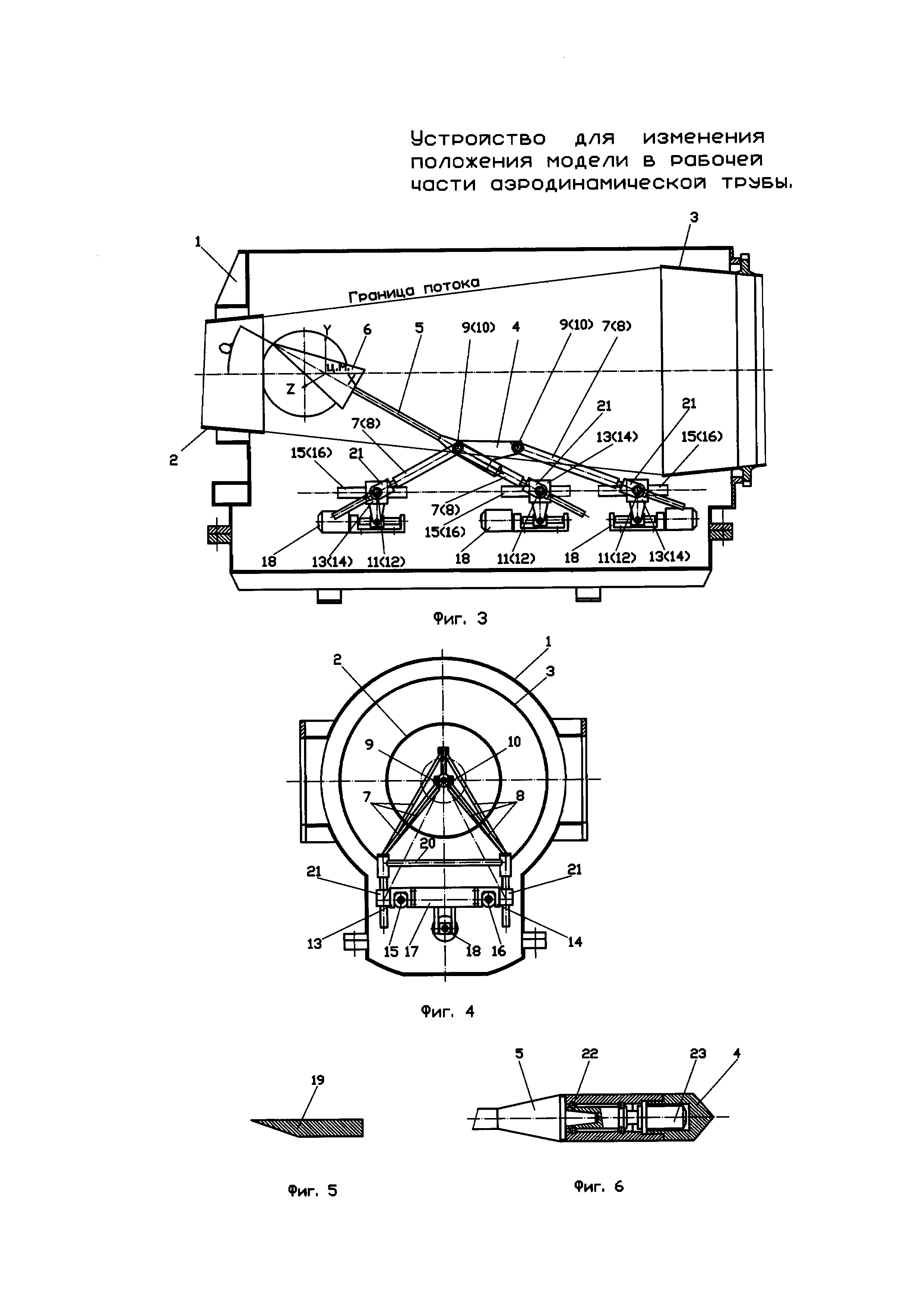
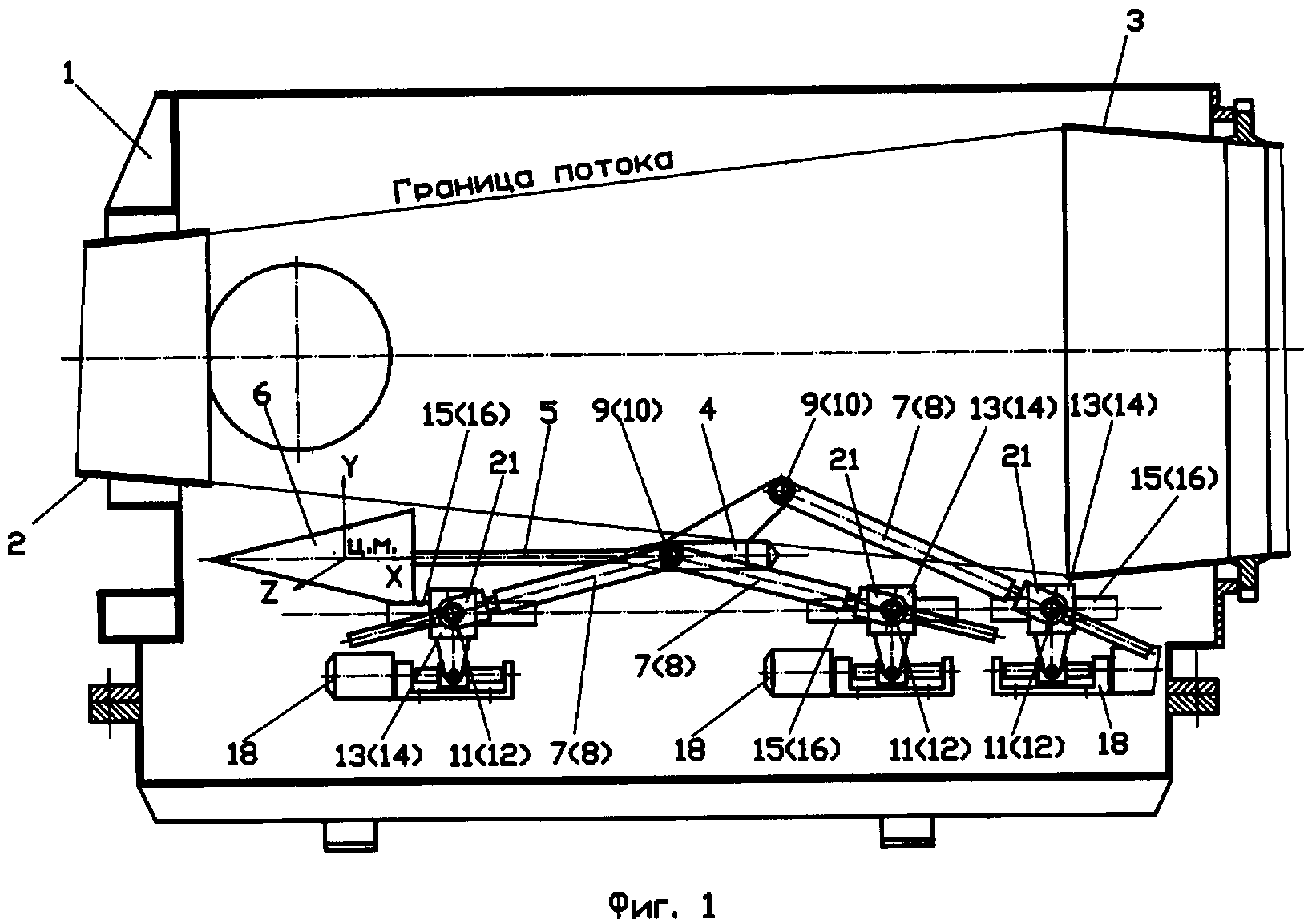
На фиг. 1-3 показан общий вид устройства для изменения положения модели в рабочей части аэродинамической трубы в различных конфигурациях: вне потока - фиг. 1; в потоке аэродинамической трубы при угле атаки α=0 - фиг. 2; в потоке аэродинамической трубы при максимальном угле атаки α=max - фиг. 3. На фиг. 4 представлен вид устройства сзади. На фиг. 5 показано типовое поперечное сечение стоек устройства, находящихся в потоке аэродинамической трубы; на фиг. 6 - продольный разрез варианта узла крепления модели.
Устройство размещается в рабочей части 1 аэродинамической трубы между соплом 2 и диффузором 3 и содержит узел крепления 4 державки 5, на которой устанавливается испытываемая модель 6. Узел крепления 4 с помощью трех основных 7 и трех дополнительных 8 стоек (элементы, указанные на фиг. 1 цифрами в скобках, находятся за основными) и основных 9 и дополнительных 10 шарниров, установленных симметрично в вертикальной плоскости на узле крепления державки в двух точках, разнесенных по его длине, соединен с основными 11 и дополнительными 12 шарнирами, установленными на основных 13 и дополнительных 14 ползунах, размещенных на основной 15 и дополнительной 16 направляющих, закрепленных в рабочей части 1 аэродинамической трубы параллельно оси сопла 2 вне границ рабочего потока симметрично вертикальной плоскости рабочей части. Соответствующие пары основных 13 и дополнительных 14 ползунов соединены между собой с помощью кареток 17, взаимодействующих с автономными приводами 18 их продольного перемещения по направляющим 15 и 16. Основной и дополнительный шарниры 9 и 10, размещенные на хвостовой части узла крепления 4 державки, смещены по вертикали относительно продольной оси узла крепления и державки на расстояние, соответствующее ее максимальному повороту в вертикальной плоскости. Части стоек 7 и 8, размещаемые в потоке аэродинамической трубы, выполнены обтекаемой формы 19 (фиг. 5), а их части, находящиеся вне потока и размещенные на одинаковых каретках, соединены жесткими перемычками 20.
В варианте исполнения устройства части стоек 7 и 8, находящиеся вне потока, размещены в плоскостях, параллельных вертикальной (фиг. 4), и выполнены с возможностью перемещения относительно соответствующих шарниров 11 и 12 (с целью изменения эффективной длины стоек), установленных на ползунах 13 и 14, при этом устройство снабжено механизмами и приводами 21 такого изменения длины стоек.
В другом варианте исполнения устройства державка 5 для установки испытываемой модели размещена в узле крепления 4 с помощью подшипников 22 (фиг. 6), обеспечивающих возможность ее поворота вокруг продольной оси и снабжена управляемым приводом 23 осевого поворота державки для задания требуемого угла крена ϕ испытываемой модели 6.
Работа устройства осуществляется с помощью программно-управляемых приводов 18, 21 и 23 следующим образом.
Перед началом испытаний в аэродинамической трубе устройство с установленной на нем испытываемой моделью 6 находится в рабочей части аэродинамической трубы в положении α=0 - фиг. 1, при этом во время запуска и выхода аэродинамической трубы на расчетный режим модель изолирована от воздействия рабочего потока из сопла 2 и пусковых перегрузок.
Далее производят перемещение модели в поток. Для этого (по основному варианту предлагаемого технического решения) производят с помощью автономных приводов 18 синхронное программно-управляемое перемещение двух передних кареток 17 по направляющим 15 и 16 навстречу друг другу, а задней - вперед по направлению к соплу. При этом соответствующие стойки 7 и 8 воздействуют на узел крепления 4 державки, обеспечивая его подъем и перевод устройства и испытываемой модели в положение α=0 - фиг. 2.
Задание державке 5 и модели 6 требуемых углов атаки α (при фиксированном положении оси вращения модели, обусловленном местом расположения оптических окон в стенках рабочей части для регистрации картин обтекания модели) и положений вдоль осей x и y осуществляют соответствующим программно-управляемым смещением кареток 17 по направляющим 15 (16) с помощью автономных приводов 18. Показанное на фиг. 3 положение соответствует максимальному значению угла атаки α=max. В рассматриваемой конструкции предусмотрена возможность задания значения минимального угла атаки α, немного отличающегося от нулевого (~ - 5°); при необходимости полный диапазон отрицательных углов атаки α=min модели 6 может быть обеспечен ее поворотом на угол ϕ=180° в положении α=max. При этом для основного варианта предложенного технического решения (при неизменяемой длине стоек) положение ползунов 13(14) отмечено одной звездочкой *, а при использовании дополнительного варианта (с укорочением длины стоек 7 (8)) - двумя звездочками **. Очевидно, что при укорочении стоек 7 (8) реализуется более жесткая структура устройства, которую можно использовать и в начальном положении устройства (фиг. 1), при этом ввод модели в поток может осуществляться быстрее при совместной работе управляемых приводов 18 и 21.
Задание державке 5 и модели 6 требуемых углов крена ϕ осуществляется с помощью привода 23 в любом из положений модели по x, y и углу атаки α.
Перед сходом с режима аэродинамической трубы устройство соответствующим программно-управляемым смещением кареток 17 возвращают в положение фиг. 2 (при положении модели α=0), а затем переводят в исходное положение, фиг. 1, вне потока аэродинамической трубы.
Таким образом, разработанная конструкция устройства обеспечивает расширенные функциональные возможности при существенном повышении его жесткости и, как следствие, точность позиционирования испытываемой модели.
Модульная робототехническая технологическая установка
Механизм с тремя степенями свободы
Тензометрический динамометр
Композиция для приготовления комплексной добавки для бетонов и способ ее производства
Пространственный механизм с шестью степенями свободы
Пространственный механизм
Коробка передач
Способ получения покрытия
Пространственный механизм с тремя степенями свободы
Пространственный механизм с четырьмя степенями свободы
Модульная робототехническая технологическая установка
Механизм с тремя степенями свободы
Тензометрический динамометр
Композиция для приготовления комплексной добавки для бетонов и способ ее производства
Пространственный механизм с шестью степенями свободы
Пространственный механизм
Коробка передач
Способ получения покрытия
Пространственный механизм с тремя степенями свободы
Пространственный механизм с четырьмя степенями свободы

