Результат интеллектуальной деятельности: СПОСОБ ПЕРЕДАЧИ ПРЯМЫХ СИГНАЛОВ УПРАВЛЕНИЯ В СИСТЕМАХ РАДИОСВЯЗИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящая заявка относится в общем к способу и устройству в системе радиосвязи и, в частности, к способу и устройству для передачи прямых сигналов управления в такой системе.
Уровень техники
Прямая связь между устройствами или межмашинная связь (device-to-device (D2D) communication) представляет собой хорошо известный и широко используемый компонент многих существующих технологий радиосвязи, включая самоорганизующиеся сети и сети сотовой связи. К примерам межмашинной связи относятся система Bluetooth и несколько вариантов систем согласно группе стандартов IEEE 802.11, таких как WiFi Direct. Эти системы работают в нелицензируемом спектральном диапазоне.
Системы межмашинной связи в качестве основы для систем сотовой связи были предложены как средство, которое позволяет использовать преимущества близкого взаимного расположения устройств связи и в то же время дает этим устройствам возможность работать в среде с контролируемыми помехами. Обычно предполагается, что такая межмашинная связь использует тот же самый спектральный диапазон, в котором работает сотовая связь, например, путем резервирования некоторых ресурсов восходящей связи в системе сотовой связи для целей межмашинной связи. Выделение специального спектрального диапазона только для целей межмашинной связи является менее вероятной альтернативой, поскольку спектральная область представляет собой дефицитный ресурс. Кроме того, (динамическое) совместное использование спектра сервисами межмашинной связи и сервисами сотовой связи является более гибким и обеспечивает более высокую эффективность использования спектра.
Устройства, которые хотят установить связь или даже просто обнаружить и идентифицировать одно другого, обычно должны обмениваться разного рода сигналами управления непосредственно одно с другим. Сигналы управления, передаваемые непосредственно между устройствами (т.е. по принципу межмашинной связи), именуются здесь прямыми сигналами управления. Одним из примеров таких прямых сигналов управления является так называемый сигнал обнаружения и идентификации (также известный как сигнал маяка). Сигнал обнаружения и идентификации несет по меньшей мере некоторую форму идентификации и передается устройством, которое хочет быть обнаруженным и идентифицированным другими устройствами. Другие устройства могут сканировать эфир в поисках сигнала обнаружения и идентификации. Когда другие устройства приняли сигнал обнаружения и идентификации, они могут совершить необходимые действия. Например, другие устройства могут попытаться инициировать установление соединения с устройством, передавшим сигнал обнаружения и идентификации.
Когда несколько устройств передают прямые сигналы управления (сигналы обнаружения и идентификации или прямые сигналы управления какого-либо другого типа), передачи различных устройств могут быть синхронизированными (выровнены по времени) или несинхронизированными. Синхронизация может быть достигнута, например, путем приема подходящих сигналов из сети сотовой связи, в зоне действия которой находятся устройства, или из спутниковой глобальной навигационной системы, такой как система глобального местоопределения (global positioning system (GPS)). Сигналы обнаружения и идентификации, передаваемые устройством, находящимся в какой-либо ячейке системы сотовой связи, например, обычно синхронизированы со специфичным для этой ячейки опорным сигналом, передаваемым ячейкой. Даже в несинхронизированных конфигурациях развертывания может быть выгодно для разных ячеек синхронизироваться одной с другой, поддерживая разрешение по времени вплоть до уровня, получаемого из транзитных соединений. Если источником синхронизации является сетевой протокол синхронизации времени (network time protocol (NTP)), типовая величина дрейфа синхронизации имеет величину порядка +/-5 мс.
Несинхронность может иметь место, когда сигналы обнаружения и идентификации передают между несинхронизированными ячейками, провайдерами и/или наземными сетями мобильной связи общего пользования (public land mobile network (PLMN)). Согласно требованиям ProSe устройства радиосвязи, принадлежащие к одной ячейке, должны быть способны обнаружить и идентифицировать устройства радиосвязи, зарегистрированные в другой ячейке. Кроме того, расположенные близко одно от другого устройства радиосвязи могут быть зарегистрированы в разных сетях PLMN или у разных провайдеров. Там где разные ячейки, провайдеры или сети PLMN не синхронизированы между собой, с точки зрения межмашинной связи, там нет границ между ячейками.
Документ ProSe Study Item рекомендует поддержку межмашинной связи для устройств радиосвязи с внесетевым охватом. В такой ситуации возможны разные варианты синхронизации: устройство радиосвязи может синхронизироваться по глобальному опорному сигналу (например, сигналу GPS), который в общем случае отличается от опорного синхросигнала развернутых сетей связи. В качестве альтернативы устройства радиосвязи могут работать полностью асинхронным образом (нет опорного синхросигнала). Еще один вариант состоит в том, что кластер устройств радиосвязи синхронизируется со специальным устройством радиосвязи, именуемым головной станцией кластера (Cluster Head (СН)). Эта головная станция СН обеспечивает локальную синхронизацию для соседствующих с ней устройств радиосвязи. Разные кластеры не обязательно синхронизированы один с другим.
Устройства радиосвязи могут найти несинхронизированные сигналы обнаружения и идентификации на конкретной несущей (или в поддиапазоне) посредством поиска сигналов обнаружения и идентификации во времени с использованием своих конфигурированных/предварительно заданных ресурсов. Это может быть сделано, например, путем корреляции во временной области принимаемого сигнала с формами сигналов обнаружения и идентификации. Это аналогично способу, каким устройства радиосвязи осуществляют поиск ячеек согласно стандарту долговременной эволюции (long-term evolution (LTE)). Стандарт LTE использует первичный синхросигнал (primary synchronization signal (PSS)) и вторичный синхросигнал (secondary synchronization signal (SSS)).
Устройства радиосвязи могут поочередно переходить между активным («бодрствующим») состоянием и неактивным («спящим») состоянием (т.е. работать в режиме прерывистого приема (discontinuous reception (DRX))). Во время неактивного состояния запоминающее устройства и встроенные часы остаются активными, но устройство радиосвязи конфигурировано так, чтобы не контролировать никаких прямых сигналов управления. Во время активного состояния (или во время «пробуждения») устройство конфигурировано для того, чтобы действительно контролировать прямые сигналы управления. Не осуществление контроля прямых сигналов управления во время неактивного состояния уменьшает потребление энергии в устройстве.
Раскрытие изобретения
Один или несколько рассматриваемых здесь вариантов признают, что обмен несинхронизированными прямыми сигналами управления между устройствами радиосвязи угрожает им чрезмерным расходом энергии. Действительно, несинхронизированная природа прямых сигналов управления предполагает, что устройство должно контролировать передачи прямых сигналов управления от другого устройства (т.е. оставаться в активном состоянии) в течение продолжительного периода времени для того, чтобы обеспечить нахождение таких прямых сигналов с приемлемой задержкой. Один или несколько рассматриваемых здесь вариантов, однако, с успехом позволяют контролировать несинхронизированные прямые сигналы управления без того, чтобы оставаться в активном состоянии в течение продолжительного периода времени.
Более конкретно, в этом смысле описываемые здесь варианты содержат первое устройство радиосвязи в первой из нескольких групп устройств радиосвязи в системе радиосвязи. Устройства в любой конкретной группе синхронизированы с одним и тем же опорным синхросигналом. Напротив, устройства в разных группах не синхронизированы с одним и тем же опорным синхросигналом.
В некоторых вариантах, например, группы соответствуют разным кластерам устройств. Каждый кластер имеет свою головную станцию, представляющую собой устройство, соответствующее своему кластеру и назначающее ресурсы, с использованием которых устройства в кластере должны передавать прямые сигналы управления другим устройствам. В других вариантах, однако, группы соответствуют разным ячейкам в системе сотовой связи. Радиоохват для устройств в соответствующих ячейках обеспечивают узлы сети радиосвязи.
Независимо от того, соответствуют ли группы кластерам или ячейкам, первое устройство в некоторых вариантах конфигурировано для приема сообщения, указывающего для каждой из одной или нескольких групп диапазон возможных значений расхождения между опорным синхросигналом группы и общим опорным синхросигналом, где такой диапазон учитывает неопределенность этого расхождения. На основе одного или нескольких таких диапазонов, указанных в принятом сообщении, первое устройство определяет интервалы времени, в течение которых можно ожидать прием этим первым устройством прямых сигналов управления от одного или нескольких других устройств в одной или нескольких других группах. После такого определения первое устройство предпочтительно реконфигурирует интервалы времени, в течение которых это первое устройство конфигурировано для работы в активном состоянии, таким образом, чтобы с достаточно небольшим «припуском» (достаточно плотно) охватывать интервалы времени, когда ожидается прием прямых сигналов управления. При таком подходе первое устройство контролирует прямые сигналы управления от других устройств, когда это первое устройство работает в активном состоянии, но не контролирует такие прямые сигналы управления, будучи в неактивном («спящем») состоянии. В некоторых вариантах, например, устройство с небольшим припуском подгоняет интервалы времени, когда оно находится в неактивном состоянии, вокруг моментов времени потенциального приема прямых сигналов управления между группами таким образом, чтобы максимально увеличить продолжительность времени нахождения в неактивном состоянии, но при этом избежать пропуска прямых сигналов управления между группами.
Независимо от этого, в одном из вариантов принятое сообщение указывает диапазон возможных величин расхождения между опорным синхросигналом какой-либо конкретной группы и общим опорным синхросигналом путем обозначения максимальной из этих возможных величин.
В одном из вариантов общий опорный синхросигнал представляет собой опорный синхросигнал одной из этих групп.
В одном из вариантов это сообщение указывает по меньшей мере для одной из групп различные диапазоны возможных величин расхождения между опорным синхросигналом этой группы и общим опорным синхросигналом. Эти разные диапазоны ассоциированы с разными ресурсами, конфигурированными для передачи сигналов управления непосредственно между устройствами.
В других вариантах первое устройство конфигурировано для того, чтобы автономно оценивать интервалы времени, во время которых ожидается прием прямых сигналов управления, вместо или в сочетании с приемом указанного выше сообщения. В одном из вариантов, например, первое устройство конфигурировано для приема прямых сигналов управления от второго устройства, входящего во вторую группу. На основе приема этих прямых сигналов управления первое устройство оценивает интервалы времени, в которых ожидается прием прямых сигналов управления первым устройством от устройств второй группы. После этого первое устройство подстраивает интервалы времени, в которых первое устройство конфигурировано для работы в активном состоянии (для приема прямых сигналов управления от второй группы), чтобы с минимальным припуском охватывать эти найденные интервалы времени, как было ранее.
В некоторых вариантах эти оценки охватывают идентификацию прямых сигналов управления, принятых от второго устройства, как сигналов, принятых от устройства именно из второй группы, на основе выделения идентификатора второй группы из прямых сигналов управления. После этого первое устройство определяет опорный синхросигнал или диапазон возможных опорных синхросигналов из данных о моментах времени приема прямых сигналов управления от второго устройства. Наконец, эта оценка осуществляется на основе предположения, что устройства второй группы передают прямые сигналы управления в соответствии с найденным таким образом опорным синхросигналом или диапазоном возможных опорных синхросигналов.
В одном или нескольких вариантах оценка содержит определение диапазона возможных величин расхождения между опорными синхросигналами первой и второй групп, причем этот диапазон учитывает неопределенность такого расхождения. Этот диапазон в некоторых вариантах определяют, например, на основе одного или нескольких параметров: (i) запас по погрешности, допустимой для устройств в первой или второй группах, для того, чтобы можно было их считать синхронизированными с одним и тем же опорным синхросигналом; (ii) собственной задержкой распространения сигнала между узлом сети радиосвязи, ассоциированным с первой или второй группой, и устройствами и этой же группы; и (iii) собственной задержкой распространения сигнала между устройствами в различных группах. По меньшей мере часть диапазона возможных величин расхождения может быть определена на основе протокола связи, используемого для связи в и/или между разными группами.
Независимо от того, каким образом определены или оценены указанные выше интервалы времени, применяемая здесь подстройка содержит в некоторых вариантах сокращение интервалов времени, в которых первое устройство конфигурировано для работы в активном состоянии, по сравнению с ситуацией, имевшей место до того, как это первое устройство определило или оценило интервалы времени, в которых ожидается прием прямых сигналов управления.
В одном или нескольких вариантах первое устройство в результате такой подстройки предпочтительно работает в неактивном состоянии в течение интервалов времени, в которых не ожидается прием прямых сигналов управления этим первым устройством.
В некоторых вариантах первое устройство переходит в неактивное состояние раньше, чем это конфигурировано номинально в соответствии с подстройкой. Первое устройство делает это в ответ на прием и декодирование прямых сигналов управления в течение интервала времени, когда это первое устройство находится в активном состоянии.
По меньшей мере в одном из вариантов первое устройство время от времени или периодически удлиняет интервалы времени, в которых это устройство номинально конфигурировано для работы в активном состоянии согласно подстройке, так что припуск, с каким эти интервалы времени охватывают моменты, когда ожидается прием прямых сигналов управления, более не является небольшим. Но когда происходит прием прямых сигналов управления в пределах этих удлиненных интервалов времени, первое устройство вновь подстраивает интервалы времени, в которых оно конфигурировано для работы в активном состоянии, с целью с небольшим припуском охватывать интервалы времени, когда ожидается прием прямых сигналов управления, учитывая прямые сигналы управления, принятые в течение этих удлиненных интервалов времени.
Еще в одной группе других вариантов первое устройство номинально конфигурируют согласно результатам подстройки для работы в активном состоянии в соответствии с использованием периодически повторяющихся ресурсов времени, с небольшим припуском охватывающих интервалы времени, когда оно ожидает прием прямых сигналов управления. В ответ на определение, что прямые сигналы управления не были приняты с использованием указанных временных ресурсов для заданного количества времени, это первое устройство увеличивает периодичность используемых временных ресурсов. Но в ответ на определение, что произошел перезапуск прямых сигналов управления с использованием этих временных ресурсов, первое устройство уменьшает периодичность использования этих временных ресурсов.
Описываемые здесь варианты далее содержат соответствующую аппаратуру, компьютерные программы, носители и компьютерные программные продукты.
Безусловно, настоящее изобретение не ограничивается описываемыми здесь признаками и преимуществами. Действительно, специалисты в рассматриваемой области должны понять дополнительные признаки и преимущества настоящего изобретения после прочтения последующего подробного описании и просмотра прилагаемых чертежей.
Краткое описание чертежей
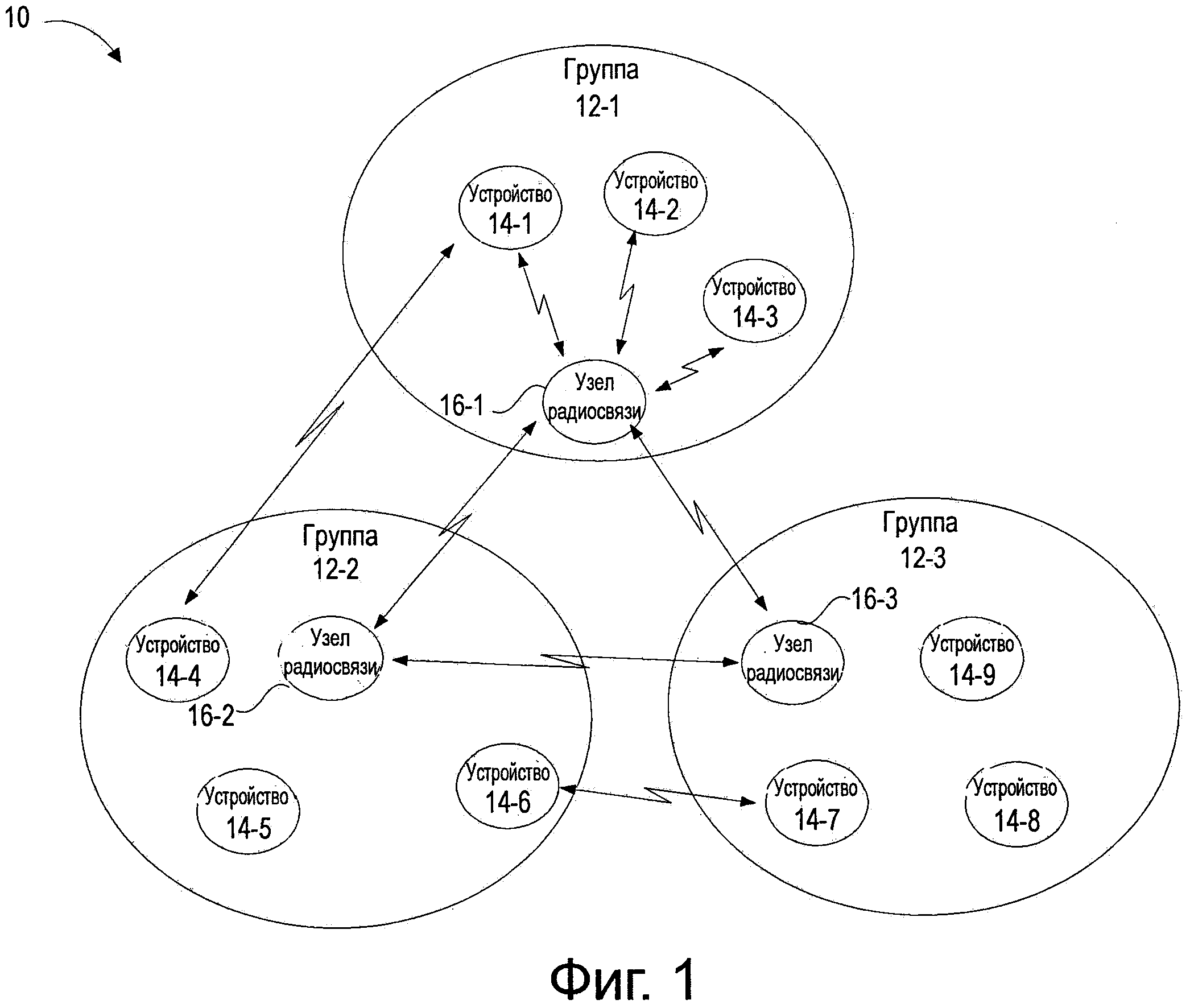
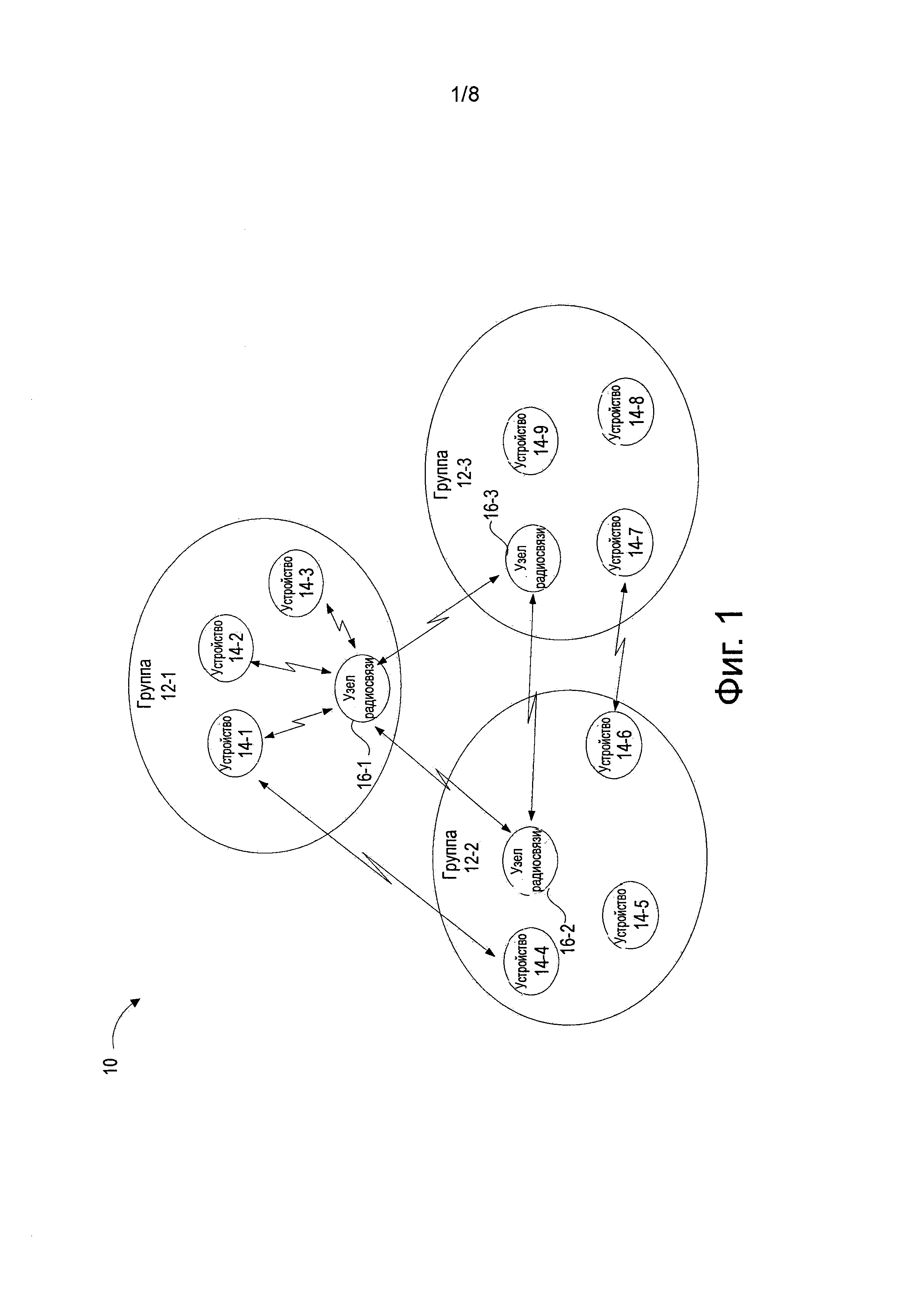
Фиг. 1 представляет блок-схему системы радиосвязи согласно одному или нескольким вариантам, содержащей несколько групп устройств радиосвязи.
Фиг. 2 представляет собой блок-схему сети радиодоступа, содержащей несколько ячеек, соответствующих группам, показанным на Фиг. 1, согласно одному или нескольким вариантам.
Фиг. 3 представляют логическую схему способа, осуществляемого первым устройством радиосвязи согласно одному или нескольким вариантам.
Фиг. 4 иллюстрирует пример способа, каким первое устройство радиосвязи подстраивает интервалы времени, в которых оно конфигурировано для работы в активном состоянии, согласно одному или нескольким вариантам.
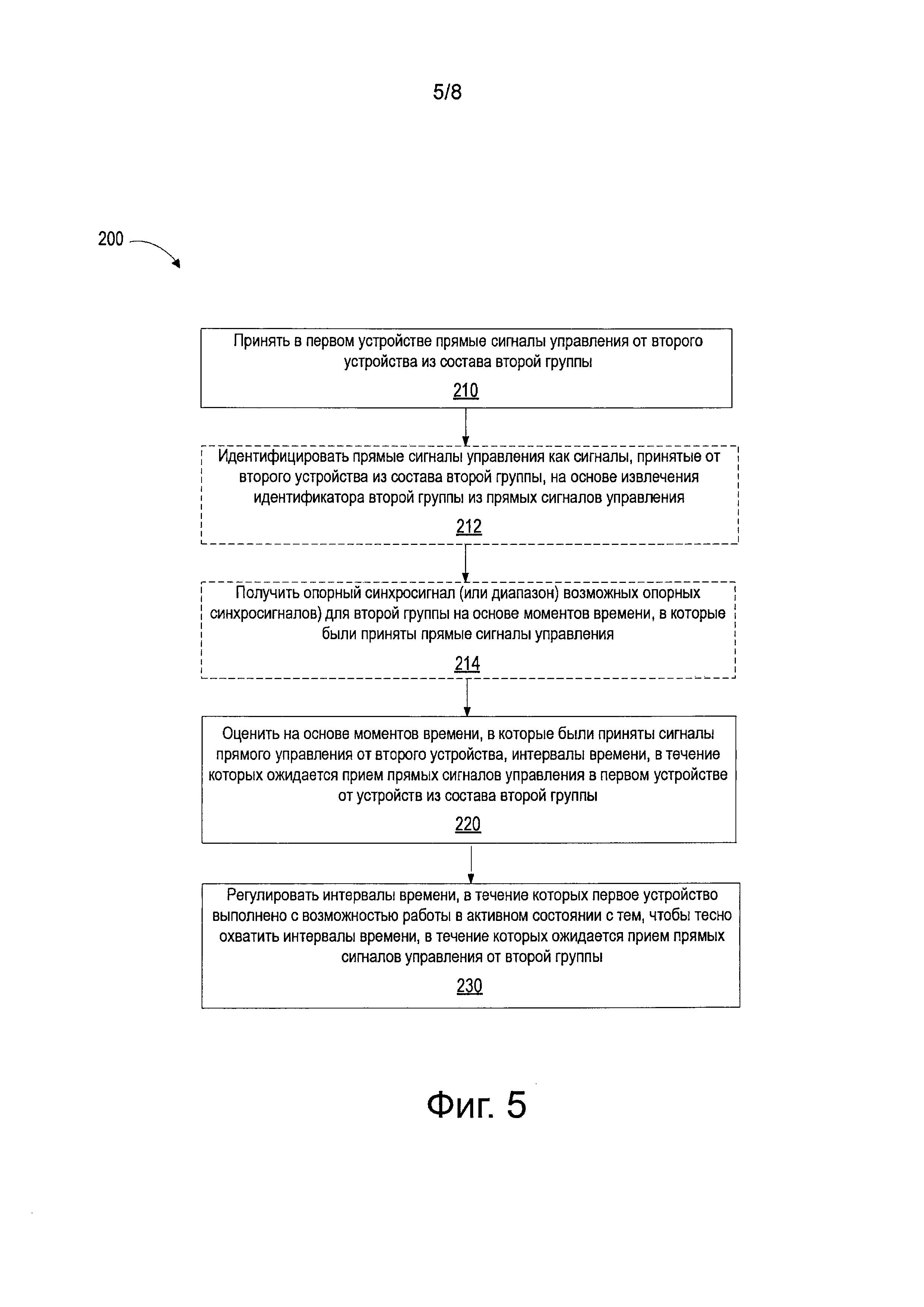
Фиг. 5 представляют логическую схему способа, осуществляемого первым устройством радиосвязи согласно одному или нескольким другим вариантам.
Фиг. 6 и 7 иллюстрируют примеры способа, каким первое устройство радиосвязи подстраивает интервалы времени, в которых оно конфигурировано для работы в активном состоянии, согласно одному или нескольким другим вариантам.
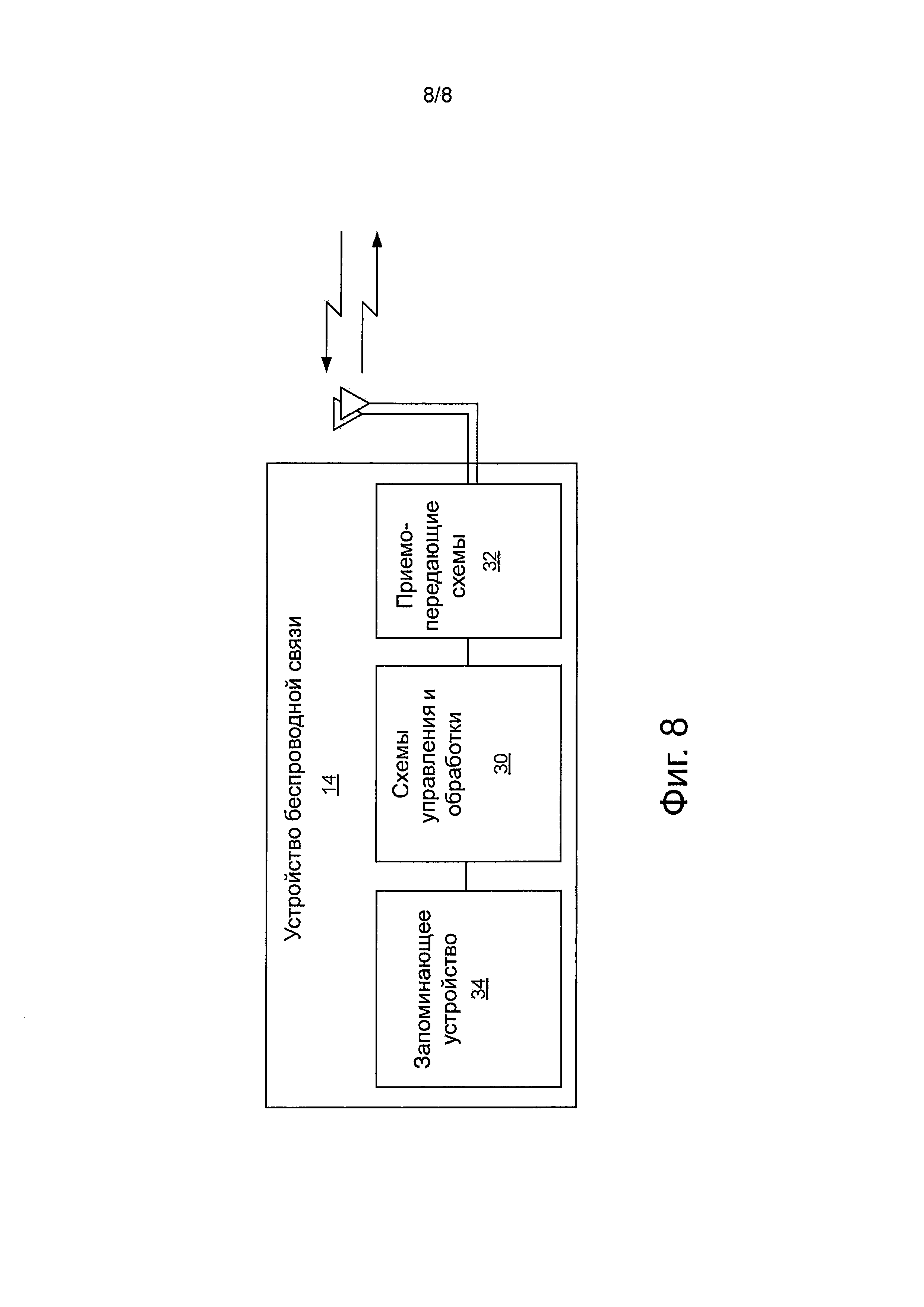
Фиг. 8 представляет блок-схему первого устройства радиосвязи согласно одному или нескольким вариантам.
Осуществление изобретения
На Фиг. 1 представлена система 10 радиосвязи, содержащая несколько групп 12 устройств 14 радиосвязи. Более конкретно, Фиг. 1 иллюстрирует в качестве примера одну группу 12-1 из трех устройств с 14-1 по 14-3, другую группу 12-2 из трех устройств с 14-4 по 14-6 и еще одну группу 12-3 из трех устройств с 14-7 по 14-9. Устройства 14 в любой конкретной группе 12 синхронизированы с одним и тем же опорным синхросигналом, по меньшей мере в пределах заданного «приемлемого» запаса погрешности. Будучи синхронизированы таким способом, устройства 14 в любой конкретной группе 12 выбирают моменты своих передач и приема ими сигналов в соответствии с одним и тем же опорным синхросигналом. Устройства 14 из разных групп 12, напротив, не синхронизированы с одним и тем же опорным синхросигналом, а это означает, что для опорных синхросигналов разных групп 12 (и тем самым моментов передачи и приема сигналов в разных группах 12) существует риск расхождения.
С каждой группой 12 ассоциирован свой узел 16 радиосвязи. Как показано, например, узел 16-1 радиосвязи ассоциирован с группой 12-1, узел 16-2 радиосвязи ассоциирован с группой 12-2 и узел 16-3 радиосвязи ассоциирован с группой 12-3. Узел 16 радиосвязи, как он используется здесь, конфигурирован для передачи и приема радиосигналов и для управления одним или несколькими устройствами 14 в ассоциированной с ним группе 12 в некоторой степени (например, путем управления опорным синхросигналом, используемым группой 12).
В некоторых вариантах, например, различные группы 12 соответствуют разным ячейкам в системе сотовой связи. В таком случае узлы 16 радиосвязи, показанные на Фиг. 1, представляют собой узлы сети радиосвязи (например, базовые станции), каждый из которых обеспечивает радиосвязь для групп 12 устройств в своей ячейке. Поэтому такой случай, где это подходит, именуется случаем сетевого (NW) покрытия, где устройства 14 находятся в зоне покрытия сети радиосвязи и осуществляют связь с этой сетью через узлы радиосвязи, обеспечивающие радиосвязь для своих соответствующих ячеек.
Фиг. 2 широко иллюстрирует случай сетевого покрытия, показывая устройства 14, находящиеся в зонах, где радиосвязь обеспечивают узлы 18 сети радиосвязи (например, базовые станции) в сети 20 радиооступа. Ячейки 22, создаваемые этими узлами 18 сети радиосвязи, соответствуют группам 12, показанным на Фиг. 1, и могут соответствовать разным ячейкам 22 одной и той же сети мобильной связи общего пользования (PLMN), разным провайдерам или разным сетям PLMN. Устройства 14, расположенные в одной и той же ячейке 22 (зарегистрированные в одной и той же ячейке 22), синхронизированы с одним и тем же опорным синхросигналом и обычно получают синхронизацию из нисходящих передач этой ячейки 22. Это обеспечивает, что передачи от разных устройств 14 синхронизированы по времени и, следовательно, прием в каком-либо конкретном устройстве 14 грубо синхронизирован. Разница синхронизации пропорциональна расстоянию и может быть «поглощена» циклическим префиксом в системе с ортогональным частотным уплотнением (orthogonal frequency-division multiplexing (OFDM)), например. В любом случае, ситуация сетевого покрытия предполагает, что рассматриваемые устройства 14 располагаются достаточно близко одно к другому, чтобы осуществлять связь непосредственно одно с другим, например, через межмашинную связь, независимо от того, обслуживаются ли эти устройства 14 разными узлами 18 сети радиосвязи. Такое предположение часто оказывается справедливым, например, в гетерогенных сетях связи, использующих макроузлы радиосвязи, а также пико, микро и т.д. узлы радиосвязи.
В других вариантах различные группы 12, показанные на Фиг. 1, соответствуют разным кластерам устройств 14, синхронизированных с одним и тем же опорным синхросигналом. Это может быть случай, например, когда устройства 14 либо не конфигурированы для связи с какой-либо сетью радиосвязи, либо просто находятся не в зоне покрытия такой сети связи, но устройства 14, входящие в какой-либо конкретный кластер, находятся, тем не менее, в пределах диапазона связи каждого из этих устройств для межмашинной связи. В таком случае, который здесь подходящим образом именуется случаем отсутствия сетевого покрытия, узлы 16 радиосвязи, показанные на Фиг. 1, являются так называемыми головными станциями кластеров.
Головная станция кластера, как она используется здесь, представляет собой устройство 14 радиосвязи, которое не только принадлежит к одной из групп 12 устройств 14, но также управляет устройствами 14 в этой группе 12 в некоторой степени; иными словами, головная станция кластера служит главой кластера устройств 14, синхронизированных с одним и тем же опорным синхросигналом. Головная станция кластера в некоторых вариантах, например, имеет специальные управляющие полномочия для назначения ресурсов «прямого управления», используемые устройствами 14 в кластере для передачи прямых сигналов управления другим устройствам 14. Иными словами, вместо того, чтобы устройства 14 автономно решали, какие ресурсы использовать для передачи прямых сигналов управления (например, возможно в рамках подмножества предварительно конфигурированных ресурсов, таких как некоторый поддиапазон), головная станция кластера принимает такое решение от имени кластера в целом. Головная станция в качестве альтернативы или дополнительно управляет устройствами 14 в группе 12 посредством управления опорным синхросигналом, используемым группой 12.
Независимо от того, составляют ли группы 12, показанные на Фиг. 1, ячейки или кластеры, устройства 14 обмениваются так называемыми прямыми сигналами управления 14 из той же самой или другой группы 12. Прямые сигналы управления здесь обозначают сигналы управления, передаваемые непосредственно между устройствами 14, т.е. посредством межмашинной связи (D2D), не использующей каких-либо промежуточных узлов. Одним из примеров таких прямых сигналов управления является так называемый сигнал обнаружения и идентификации (также известный как сигнал маяка), который устройство 14 передает, чтобы быть обнаруженным и идентифицированным другими устройствами 14, находящимися поблизости. Любые описываемые здесь варианты, фокусируемые на таких сигналах обнаружения и идентификации, в равной степени применимы к другим типам прямых сигналов управления, если не указано иначе. По меньшей мере в некоторых вариантах узел 16 радиосвязи для группы 12 конфигурирует ресурсы для передачи прямых сигналов управления, таких как сигналы обнаружения и идентификации, согласно периодической, регулярной, разреженной во времени или другой заранее заданной схеме. Временные (и возможно частотные) ресурсы для передачи/приема прямых сигналов управления в какой-либо конкретной группе 12 определяют с учетом опорного синхросигнала для этой группы 12. Для устройств 14 из какой-либо конкретной группы, синхронизирующих свои передачи и прием по одному и тому же опорному синхросигналу, обмен прямыми сигналами управления между этими устройствами 14 синхронизирован уже по самой своей природе. Напротив, поскольку устройства 14 из разных групп 12 синхронизируют свои передачи и прием по разным опорным синхросигналам, передачи прямых сигналов управления между устройствами 14 из разных групп 12 несинхронизированы одни с другими уже по самой своей природе.
Для повышения энергетической эффективности любое конкретное устройство 14 радиосвязи работает либо в активном («бодрствующем») состоянии, либо в неактивном («спящем») состоянии в соответствии с циклом «активное-неактивное состояние» (например, циклом прерывистого приема (DRX)). В активном состоянии устройство 14 контролирует прямые сигналы управления от других устройств 14, например, путем включения одного или нескольких приемников. В неактивном состоянии, напротив, устройство 14 не контролирует эти прямые сигналы управления, например, путем выключения одного или нескольких приемников. Соответственно, устройство 14 сберегает больше энергии при работе в неактивном состоянии, чем при работе в активном состоянии. Несинхронизированная природа прямых сигналов управления между группами угрожает, однако, способности устройства сберегать энергию таким способом.
Устройство 14 согласно одному или нескольким рассматриваемым здесь вариантам контролирует, однако, прямые сигналы управления между группами энергетически эффективным способом, несмотря на несинхронизированную природу таких сигналов. В этом отношении, любое конкретное устройство 14 номинально передает и контролирует прямые сигналы управления в соответствии с опорным синхросигналом своей группы 12. В противном случае это должно было бы привести к предположению, что устройство 14 должно контролировать прямые сигналы управления между группами в течение продолжительного периода времени (поскольку устройство 14 в противном случае не имеет информации о том, когда следует ожидать прямые сигналы управления между группами, вследствие несинхронизированной природы таких сигналов). Один или несколько из предлагаемых здесь вариантов предпочтительно позволяет устройству 14 контролировать несинхронизированные прямые сигналы управления без необходимости оставаться в активном состоянии в течение столь продолжительного периода времени.
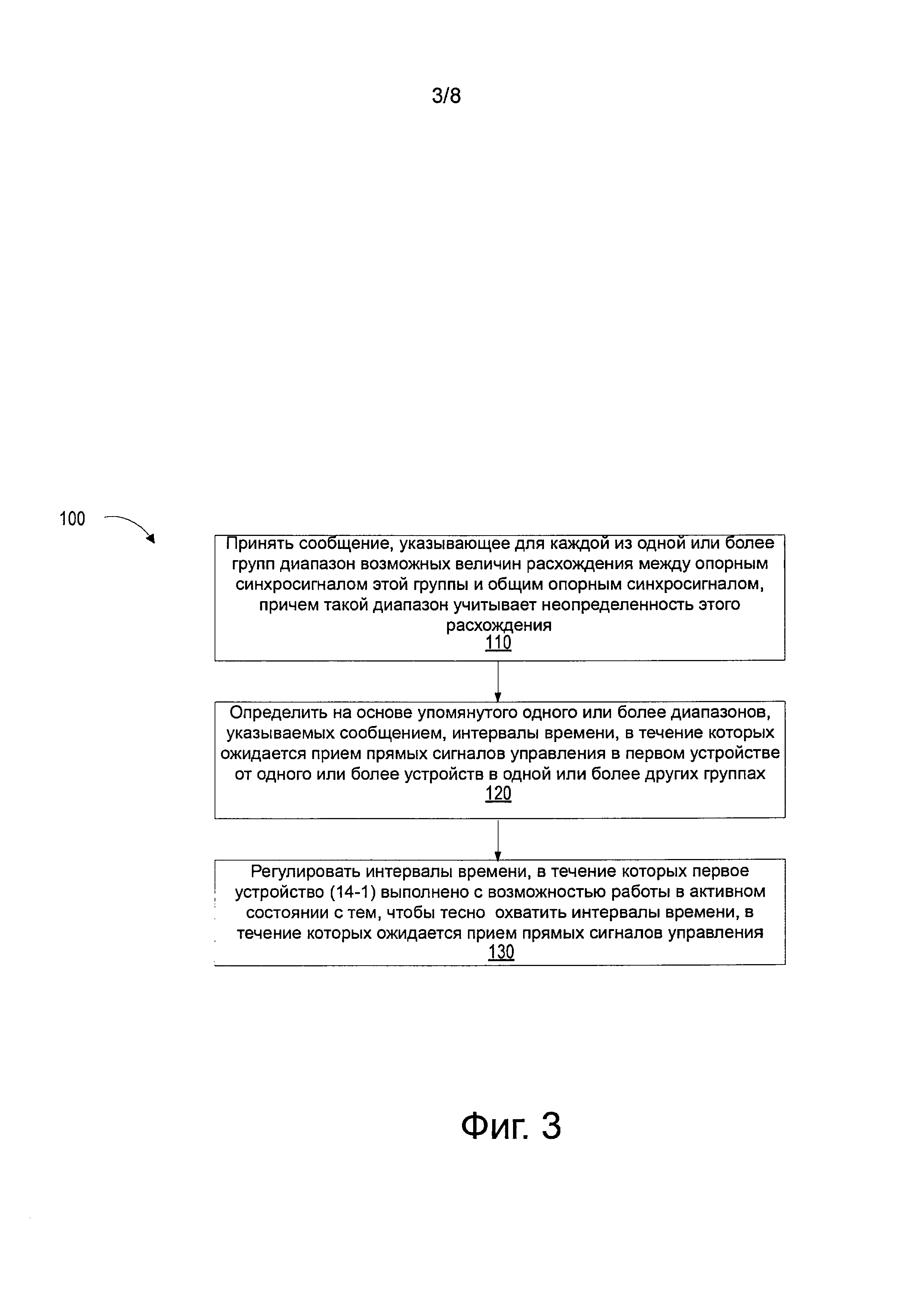
Фиг. 3, например, иллюстрирует варианты, позволяющие устройству 14 сделать это, путем передачи устройству 14 некоего сообщения специального вида. В частности, в этом отношении, первое устройство 14-1 радиосвязи в группе 12-1 конфигурировано для осуществления способа 100, показанного на Фиг. 3, согласно одному или нескольким вариантам. Первое устройство 14-1 конфигурировано для приема конкретного сообщения (блок ПО), например, от узла 16-1 радиосвязи (т.е. от базовой станции или от головной станции кластера), ассоциированного с группой 12-1 устройств. Это конкретное сообщение указывает, для каждой из одной или нескольких групп 12, диапазон возможных величин расхождения между опорным синхросигналом рассматриваемой группы 12 и общим опорным синхросигналом, где такой диапазон учитывает неопределенность этого расхождения. В некоторых вариантах указанный общий опорным синхросигнал представляет собой опорный синхросигнал для некой группы 12, означая, что сообщение прямо указывает диапазон возможных величин расхождения между опорными синхросигналами разных групп. В других вариантах общий опорный синхросигнал является абсолютным опорным синхросигналом (например, глобальным или универсальным опорным синхросигналом, отдельным от какой-либо группы 12). В таком случае, сообщение по-прежнему указывает диапазон возможных величин расхождения между опорными синхросигналами разных групп, но это сообщение указывает этот диапазон лишь косвенно, чем абсолютный опорный синхросигнал или в сочетании с другой информацией. В любом случае, поэтому, сообщение предоставляет информацию, позволяющую первому устройству 14-1 определить диапазон возможных величин расхождения между опорными синхросигналами разных групп 12 (например, между группой 12-1 и группой 12-2 и/или между группой 12-1 и группой 12-3) с учетом неопределенности такого расхождения. Если группы 12 соответствуют ячейкам 22, например, сообщение по меньшей мере в некоторых вариантах содержит указание погрешности синхронизации между обслуживающей ячейкой и другими ячейками поблизости, устройства 14 из которых передают интересующие прямые сигналы управления.
Независимо от этого устройство 14-1 дополнительно конфигурировано для определения, на основе одного или нескольких диапазонов, указанных принятым сообщением, интервалов времени, в которых ожидается (или вероятен) прием прямых сигналов управления от одного или нескольких устройств 14 в одной или нескольких других группах 12 (т.е. в группе 12-2 и/или группе 12-3) (блок 120). Иными словами, первое устройство 14-1 определяет на основе указанного диапазона(ов), что если какое-либо устройство (например, устройство 14-4) из другой группы (например, из группы 12-2) передаст такие прямые сигналы управления, тогда эти прямые сигналы управления будут приняты первым устройством 14-1 в пределах интервалов времени, найденных в соответствии с указанным в сообщении диапазоном возможных величин расхождения опорных синхросигналов между рассматриваемыми группами (например, группами 12-1 и 12-2). В любом случае, определив таким способом новые величины интервалов времени, первое устройство 14-1 подстраивает интервалы времени, в которых оно конфигурировано для работы в активном состоянии, с целью с небольшим припуском охватывать интервалы времени, где ожидается (или вероятен) прием прямых сигналов управления (блок 130). В некоторых вариантах, например, первое устройство 14-1 предпочтительно работает в неактивном состоянии в течение интервалов времени, когда согласно описанному выше определению не ожидается или невероятен прием прямых сигналов управления между группами. Это эффективно сберегает энергию аккумуляторов в устройстве, по-прежнему обеспечивая приемлемую величину времени задержки при приеме прямых сигналов управления между группами.
По меньшей мере в общем смысле сообщение, принятое первым устройством 14-1 на Фиг. 3, эффективно описывает несинхронизированную природу прямых сигналов управления между группами в системе 10, учитывая неопределенность, присутствующую в этой несинхронизированной природе. Информация в этом смысле эффективно делает устройство 14-1 осведомленным о множестве временных ресурсов, где ожидается появление прямых сигналов управления (например, сигналов обнаружения и идентификации) даже от устройств из других (например, соседствующих) групп 12. Первое устройство 14-1 согласно Фиг. 3 предпочтительно использует эту информацию о несинхронизированной природе сигналов с целью более близкой (с меньшим припуском) подгонки интервалов времени, когда это устройство контролирует прямые сигналы управления (например, цикл активного-неактивного состояний или цикл DRX) к моментам потенциального приема прямых сигналов управления.
В некоторых вариантах принятое сообщение указывает диапазон возможных величин расхождения между опорным синхросигналом рассматриваемой группы 12 и общим опорным синхросигналом путем индикации максимальной из этих возможных величин. Иными словами, диапазон указан в терминах максимально возможного расхождения синхросигналов (например, при известном или предварительно заданном минимальном возможном расхождении синхросигналов). Когда группы 12 соответствуют ячейкам 22, например, диапазон синхросигналов может описывать максимальную величину расхождения синхросигналов между соседствующими ячейками 22.
Независимо от конкретной реализации сообщение, в частности, указывает диапазон расхождений синхросигналов, в противоположность единственной величине сдвига между синхросигналами, чтобы учесть один или несколько источников неопределенности в таком расхождении. В некоторых вариантах один из таких источников неопределенности проистекает из запаса погрешности, допустимого для устройств 14 в одной и той же группе 12, чтобы эти устройства считались синхронизированными с одним и тем же опорным синхросигналом. Действительно, этот запас погрешности эффективно позволяет существование диапазона возможных величин расхождения между реальными опорными синхросигналами, используемыми устройствами 14 в одной и той же группе 12. Диапазон величин расхождения синхросигналов, указанный сообщением, охватывает и иначе учитывает этот запас погрешности.
В качестве альтернативы или в дополнение к этому другой источник неопределенности проистекает из естественной задержки радиосигналов между узлом 16 радиосвязи, обслуживающим и организующим группу, (например, базовой станцией или головной станцией кластера) и устройствами 14 в этой группе 12. Действительно, эта задержка распространения сигнала влияет на восприятие опорного синхросигнала группы устройством в неизвестной степени.
В качестве еще одного примера, другой источник неопределенности проистекает из естественной задержки распространения радиосигналов между устройствами 14 из разных групп 12. Эта неизвестная задержка распространения сигналов влияет на восприятие устройством степени расхождения между опорными синхросигналами групп.
Источники неопределенности, учитываемые указанным сообщением, безусловно не ограничиваются приведенными выше примерами. Иными словами, в общем случае один или несколько вариантов, описываемых здесь, предполагают, что один или несколько диапазонов величин расхождения, указанные в сообщении, учитывают какой-либо или все источники такой неопределенности, включая те источники, которые не были очерчены в явном виде в приведенных выше примерах.
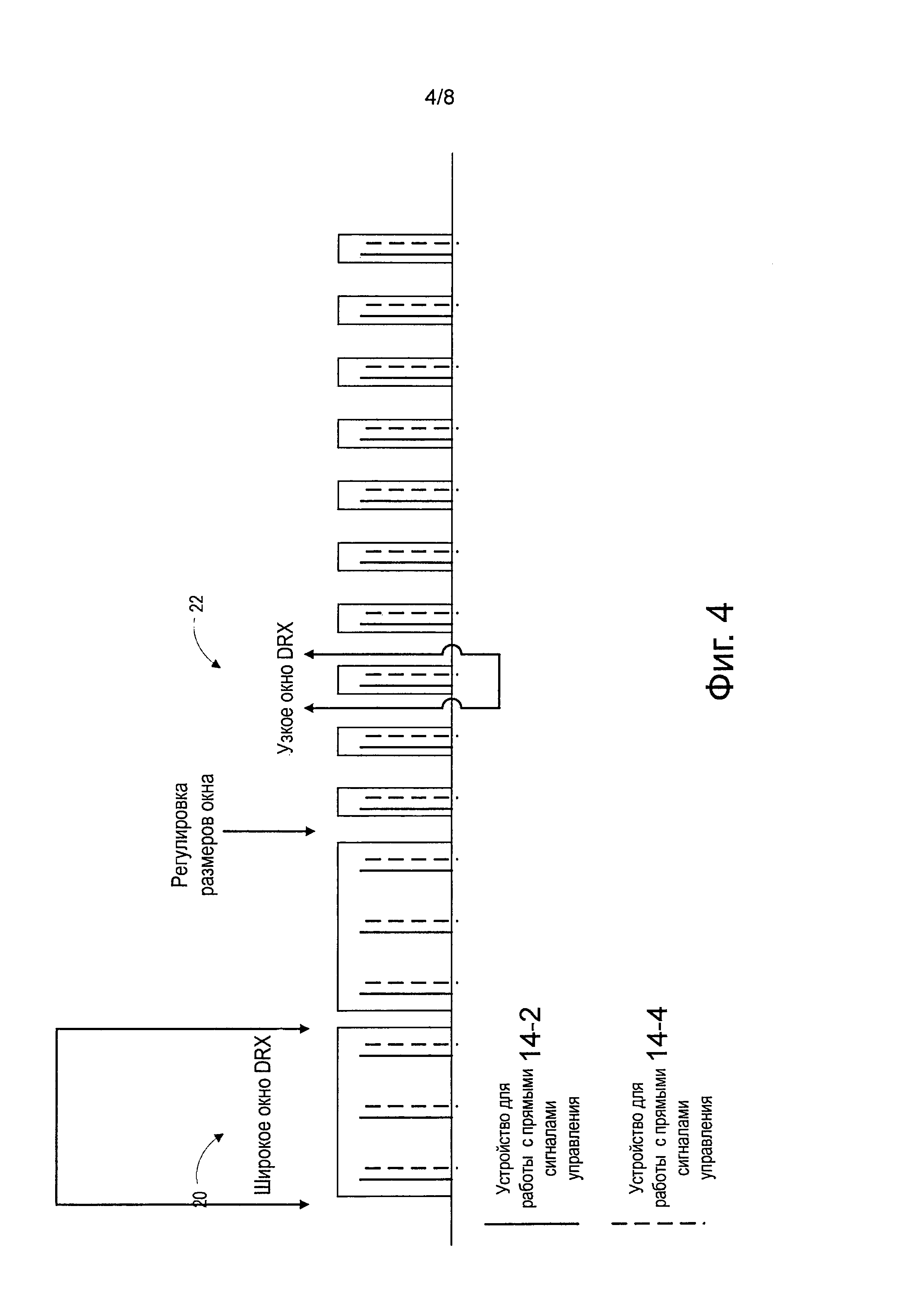
Понимая эту неопределенность, первое устройство 14-1 согласно некоторым вариантам предпочтительно укорачивает интервалы времени, в течение которых оно конфигурировано для работы в активном состоянии, например по сравнению с ситуацией, имевшей место до того, как первое устройство 14-1 определило интервалы времени, в которых ожидается прием прямых сигналов управления. Рассмотрим, например, цикл активного-неактивного состояния (т.е. цикл DRX), показанный на Фиг. 4. Как показано, время пребывания в активном состоянии в течение цикла подстроено первым устройством 14-1 от более энергетически неэффективного цикла 20, в котором устройство 14-1 работает в активном состоянии в течение продолжительных периодов времени, к более энергетически эффективному циклу 22, в котором устройство 14-1 работает в активном состоянии в течение более коротких периодов времени. Действительно, вместо того, чтобы интервалы времени пребывания в активном состоянии (именуемые здесь «окна для прерывистого приема» или «окна DRX» ("DRX Wndows")) широко (с большим «припуском») охватывали моменты времени, когда должны были бы быть приняты прямые сигналы управления, в наиболее консервативном варианте, первое устройство 14-1 подстраивает размер своего окна DRX таким образом, чтобы плотно, с минимальным припуском охватывать интервалы времени, в которых ожидается (или вероятен) прием прямых сигналов управления (например, от устройства 14-2 из группы 12-1 и устройства 14-4 из группы 12-2). Иными словами, устройство 14-1 подстраивает свой период прерывистого приема (DRX) таким образом, что это устройство активизировалось на время своих окон прямого управления (DC) и переходило в неактивное состояние («засыпало») на все остальное время, для целей приема прямых сигналов управления. Безусловно, устройство 14-1 может остаться в активном состоянии и в другие периоды времени для выполнения разного рода других операций, отличных от приема прямых сигналов управления, но при этом устройство 14-1 активно для приема прямых сигналов управления только в течение интервалов времени, в которых ожидается прием этих прямых сигналов управления. Эти интервалы времени, описываемые выше, в частности учитывают неопределенность расхождения опорных синхросигналов между группами 12-1 и 12-2. Когда группы 12, показанные на Фиг. 1, соответствуют ячейкам 22, ширина окон прямого управления может зависеть от запаса по синхронизации и/или от погрешности синхронизации между ячейками 22 и может иметь величину порядка +/- несколько миллисекунд. В любом случае, это означает, что может иметь место некоторая внутренняя, присущая самому осуществляемому первым устройством процессу контроля обмена сигналами между группами энергетическая неэффективность (например, окно DRX может быть все равно длиннее, чем оно должно было бы быть, если бы имела место абсолютная определенность величины расхождения между опорными синхросигналами). Однако описанная выше подстройка времени пребывания устройства в активном состоянии уменьшает эту энергетическую неэффективность в той степени, в какой такое уменьшение возможно при наличии указанной неопределенности.
Для уменьшения указанной неопределенности и тем самым повышения энергетической эффективности устройство 14 радиосвязи согласно одному или нескольким другим вариантам настоящего изобретения автономно оценивает интервалы времени, в которых ожидается (или вероятен) прием прямых сигналов управления, передаваемых между группами, вместо или в сочетании с приемом описанного выше сообщения. Первое устройство 14-1 радиосвязи согласно некоторым вариантам является, поэтому, «интеллектуальным» устройством, которое в качестве альтернативы или в дополнение осуществляет способ 200, показанный на Фиг. 5.
Как показано на Фиг. 5, первое устройство 14-1 принимает прямые сигналы управления от второго устройства 14-4 из второй группы 12-2 (блок 210). Это первое устройство оценивает, на основе моментов времени, когда были приняты прямые сигналы управления от второго устройства 14-4, интервалы времени, в которых это первое устройство 14-1 ожидает принять прямые сигналы управления от устройств 14 из второй группы 12-2 (блок 220). Аналогично рассмотренным выше вариантам первое устройство 14-1 затем подстраивает интервалы времени, в которых оно конфигурировано для работы в активном состоянии (для приема сигналов от устройств из второй группы 12-2), таким образом, чтобы с небольшим припуском охватывать интервалы времени, в которых ожидается прием прямых сигналов управления от устройств из второй группы 12-2 (блок 230).
В общем случае, поэтому, первое устройство 14-1 оценивает опорный синхросигнал приема прямых сигналов управления для конкретной рассматриваемой группы 12 на основе того, в какие моменты времени это устройство успешно приняло прямые сигналы управления от одного или нескольких устройств 14 в пределах этой группы 12. В одном из вариантов, например, первое устройство успешно принимает по меньшей мере некоторые прямые сигналы управления от устройств (например, устройства 14-4), принадлежащих к рассматриваемой конкретной группе 12. Затем первое устройство 14-1 оценивает опорный синхросигнал, ассоциированный с рассматриваемой группой 12, и укорачивает свое окно приема вокруг ожидаемых моментов времени приема (например, аналогично тому, как показано на Фиг. 4). Благодаря автономной оценке правильного опорного синхросигнала для различных групп (например, ячеек или кластеров) на основе реального приема прямых сигналов управления, окна приема на Фиг. 5 могут быть сделаны более узкими, чем аналогичные окна согласно Фиг. 3.
Как показано на Фиг. 5, первое устройство 14-1 в некоторых вариантах использует информацию идентификации групп, передаваемую посредством прямых сигналов управления, для осуществления описанной выше оценки. В частности, первое устройство 14-4 в этих вариантах идентифицирует прямые сигналы управления как сигналы, принятые от второго устройство 14-4 в одной из конкретных групп, т.е. группы 12-2, на основе выделенного из прямых сигналов управления идентификатора этой группы (например, идентификатора ячейки, идентификатора сети PLMN и/или идентификатора кластера) (блок 212). Этот подход, конечно же, опирается на то, что устройства 14 должны передавать информацию об идентификаторе своей группы, чтобы помочь другим устройствам 14 ассоциировать их группы с правильным опорным синхросигналом. В любом случае, осуществив такую идентификацию, первое устройство 14 затем получает опорный синхросигнал (или диапазон возможных опорных синхросигналов) для конкретной группы 12-2, на основе моментов времени, когда были приняты прямые сигналы управления (блок 214). На основе предположения, что устройства 14 из состава рассматриваемой конкретной группы 212 передают прямые сигналы управления в соответствии с полученным таким способом опорным синхросигналом, первое устройство 14-1 предпочтительно оценивает интервалы времени, в которых это первое устройство 14-1 ожидает прием прямых сигналов управления от устройств 14 из состава конкретной группы 12-2.
По меньшей мере в некоторых вариантах приведенная выше оценка задерживает начала работы с энергетически эффективным соотношением между активным и неактивным состояниями до момента, пока не будет принято достаточное количество прямых сигналов управления, чтобы осуществить рассматриваемую оценку опорного синхросигнала. В этом смысле способ автономной оценки оказывается менее энергетически эффективным, чем способ на основе передаваемых и принимаемых сигналов, описанный применительно к Фиг. 3. Однако приведенная выше оценка в некоторых вариантах создает больше определенности в расхождении синхросигналов между группами, а это означает, что устройство 14-1 радиосвязи может более близко (с меньшим «припуском») подстроить моменты времени своих активного и неактивного состояний к потенциальным моментам приема прямых сигналов управления по сравнению с тем, как это делается при использовании передаваемых и принимаемых сигналов. Действительно, по меньшей мере в некоторых вариантах первое устройство 14 осуществляет оценку в блоке 220, показанном на Фиг. 5, самостоятельно определяя диапазон возможных величин расхождения между опорными синхросигналами первой и второй групп 12-1, 12-2, где этот диапазон учитывает неопределенность величины такого расхождения, как это описано выше. Иными словами, само первое устройство 14-1 оценивает или иным способом характеризует неопределенность посредством учета одного или нескольких источников неопределенности, описанных выше. Например, в одном из вариантов первое устройство 14-1 само определяет диапазоне возможных величин расхождения на основе одного или нескольких из следующих факторов (i) запаса по погрешности, разрешенной для устройств 14 в первой или второй группе 12-1, 12-2, чтобы их можно было считать синхронизированными с одним и тем же опорным синхросигналом; (ii) естественная, собственная задержка распространения сигнала между узлом 16 радиосвязи, ассоциированным с первой или второй группой 12-1, 12-2, и устройствами 14 в этой же группе; и (iii) естественная, собственная задержка распространения сигнала между устройствами 14 из состава разных групп 12. Первое устройство 14-1 может, например, в некоторых вариантах определять часть диапазона величин расхождения, которая может быть отнесена к какому-либо конкретному источнику неопределенности, на основе одного или нескольких параметров, ассоциированных со связью внутри и/или между рассматриваемыми группами 12 (например, на основе используемого протокола связи).
Независимо от того, используется ли способ автономной оценки, показанный на Фиг. 5, или способ на основе принимаемых и передаваемых сигналов, показанных на Фиг. 3, первое устройство 14-1 в некоторых вариантах осуществляет некоторые других признаки с целью еще больше сберечь энергию и/или обеспечить прием прямых сигналов управления. В одном или нескольких вариантах, например, первое устройство 14-1 дополнительно сберегает энергию путем перехода в неактивное состояние раньше, чем это номинально конфигурировано согласно подстроенному циклу активного-неактивного состояния, в ответ на прием/декодирование прямых сигналов управления. В частности, первое устройство 14-1 в некоторых вариантах принимает и декодирует прямые сигналы управления в интервале времени, когда это первое устройство 14-1 находится в активном состоянии. Несмотря на то, что первое устройство 14-1 по-прежнему номинально конфигурировано так, чтобы находиться в активном состоянии (т.е. согласно более точно (с меньшим «припуском») подстроенному циклу активного-неактивного состояния), это первое устройство 14-1 совершает более ранний переход в неактивное состояние после декодирования таких прямых сигналов управления на основе предположения или знания, что больше не ожидается прием прямых сигналов управления. Например, когда первое устройство 14-1 правильно декодировало какой-либо из прямых сигналов управления в пределах окна прямого управления (DC) (или окна DRX), оно переходит в неактивный режим, даже если это окно DC еще не закончилось. Это происходит потому, что соответствующие прямые сигналы управления уже были приняты, так что первому устройству 14-1 больше нет необходимости оставаться в активном состоянии и расходовать энергию аккумулятора в этом окне DC (например, соответствующем некоторому случаю обнаружения и идентификации, где прямой сигнал управления представляет собой сигнал обнаружения и идентификации). Независимо от этого, по меньшей мере в некоторых вариантах этот более ранний переход в неактивное состояние не оказывает никакого иного влияния на номинально конфигурированный цикл активного-неактивного состояния в первом устройстве 14-1.
Согласно одному или нескольким другим вариантам первое устройство 14-1 время от времени или периодически удлиняет интервалы времени, в которых оно номинально конфигурировано для работы в активном состоянии, так что эти интервалы времени более не подстроены с небольшим припуском, как это описано выше. Первое устройство 14-1 делает это с целью последующего обновления такой точной (с небольшим припуском) подстройки интервалов времени активного состояния. Действительно, когда прием прямых сигналов управления происходит в течение этих удлиненных интервалов времени, первое устройство 14-1 заново подстраивает интервалы времени, в которых оно конфигурировано для работы в активном состоянии, чтобы более близко (с меньшим припуском) охватывать интервалы времени, в течение которых ожидается прием прямых сигналов управления, с учетом прямых сигналов управления, принятых в течение указанных расширенных интервалов времени. При таком подходе первое устройство 14-1 не пропустит прямых сигналов управления от новых групп 12 устройств 14, вошедших в пределы дальности связи с момента времени, когда это первое устройство последний раз осуществляло подстройку с небольшим припуском интервалов времени пребывания в активном состоянии (которая (последняя подстройка) не учитывала таких новых групп 12).
Действительно, когда окно приема было укорочено согласно, например, одному из описанных выше вариантов, первое устройство 14-1 рискует пропустить новые прямые сигналы управления, оказавшиеся вне узкого окна приема. Это может быть случай, например, когда первое устройство движется поблизости от новых ячеек или кластеров. Чтобы избежать этих проблем, как только что описано, первое устройство 14-1 периодически или время от времени осуществляет более протяженный поиск прямых сигналов управления на основе более продолжительного времени пребывания в активном состоянии. В течение такого продолжительного времени пребывания в активном состоянии первое устройство 14-1 вероятно способно получить опорные синхросигналы для всех или по меньшей мере для большинства находящихся поблизости устройств 14, передающих прямые сигналы управления. Более продолжительное время пребывания в активном состоянии в некоторых вариантах, использующих сигнал обнаружения и идентификации, например, соответствует приблизительно полному циклу обнаружения и идентификации, когда все устройства 14, вовлеченные в процесс обнаружения и идентификации, передают свои сигналы обнаружения и идентификации по меньшей мере по одному разу. После получения опорных синхросигналов для таких устройств 14 окно DRX в некоторых вариантах укорачивают соответствующим образом.
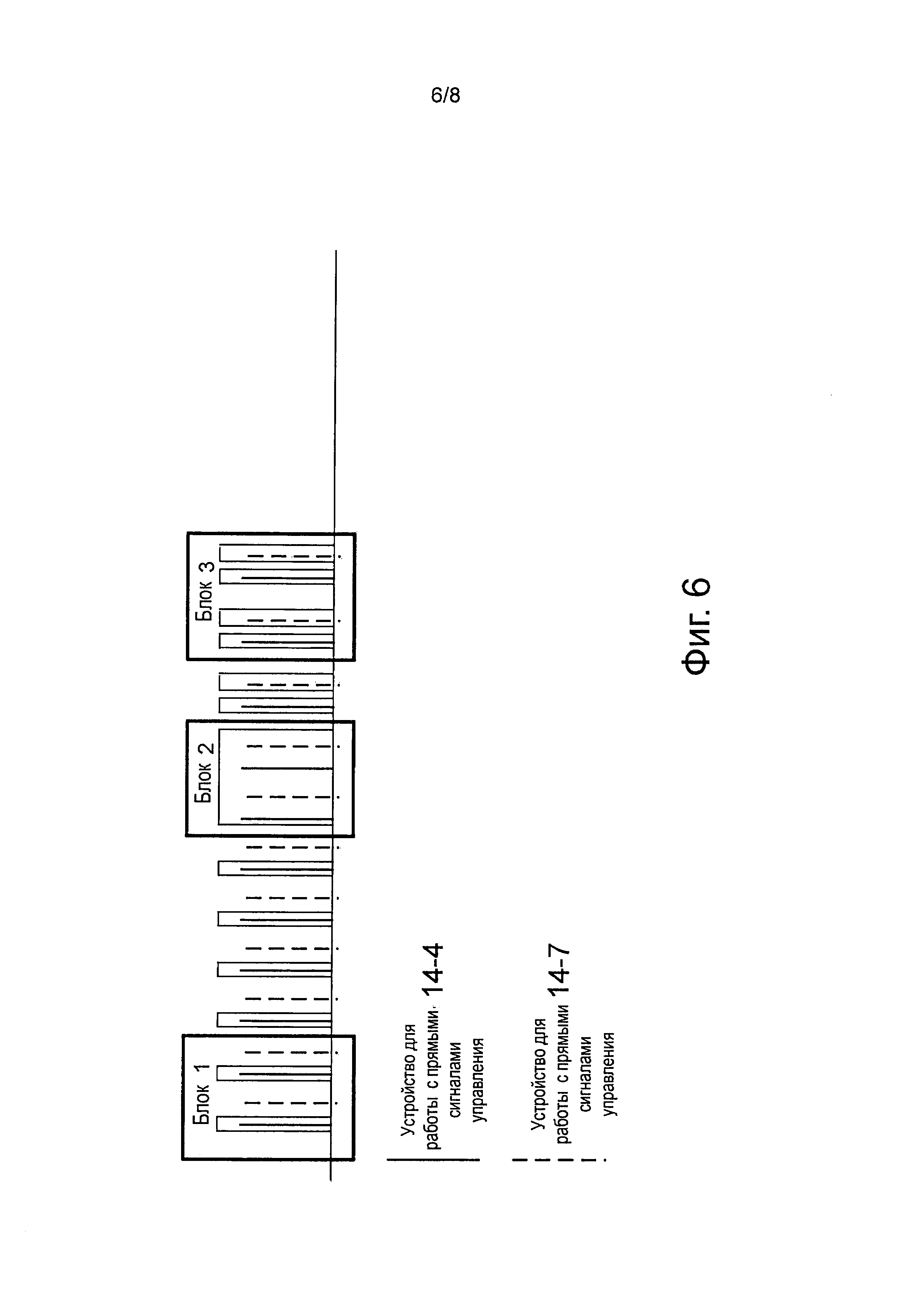
Рассмотрим пример на Фиг. 6, как показано в блоке 1, первое устройство 14-1 первоначально подстраивает интервалы времени, когда оно находится в активном состоянии, к ожидаемым моментам времени приема прямых сигналов управления от устройства 14-4 из состава второй группы 12-2. Пока оно делает это, первое устройство 14-1 входит в зону действия связи группы 12-3, членом которой, как предполагается здесь, является устройство 14-7. Для обеспечения, что первое устройство 14-1 примет прямые сигналы управления в такой ситуации, это первое устройство 14-1 конфигурируют для того, чтобы время от времени или периодически осуществлять более продолжительный цикл активности (DRX), как показано в блоке 2. В течение такого более продолжительного цикла активности первое устройство 14-1 принимает прямые сигналы управления от устройства 14-7 с другим опорным синхросигналом (поскольку устройство 14-7 принадлежит к группе, отличной от группы, куда входит устройство 14-4). После этого, первое устройство 14-1 подстраивает свои циклы активности (DRX) с меньшим припуском вокруг ожидаемых моментов приема прямых сигналов управления обеих групп 12-2 и 12-3 (т.е. для устройств 14-4 и 14-7). Как показано в блоке 3, например, первое устройство 14-1 в некоторых вариантах конфигурировано так, чтобы работать в неактивном состоянии между окнами ожидаемого приема для групп 12-2 и 12-3 (например, апериодическим образом).
Еще в одном или нескольких других вариантах в определенных обстоятельствах «выпадают» по меньшей мере некоторые интервалы времени, в течение которых первое устройство номинально конфигурировано для работы в активном состоянии. Эти варианты оказываются предпочтительными, например, из-за мобильности или по другим причинам, устройство 14 может перестать быть поблизости или может прекратить передачу прямых сигналов управления. В таком случае, продолжать контролировать ресурсы, где ни одно из устройств 14 ничего не передает, было бы бесполезным расходом энергии принимающего устройства 14.
Согласно этим вариантам, поэтому, первое устройство 14 номинально конфигурировано для работы в активном состоянии в течение периодически выделяемых временных ресурсов, которые близко (с небольшим припуском) охватывают интервалы времени, в которых первое устройство 14-1 ожидает приема прямых сигналов управления. В ответ на определение, что в течение рассматриваемого временного ресурса в продолжение заданного количества времени не было принято ни одного прямого сигнала управления, первое устройство 14-1 увеличивает период появления этого временного ресурса. Иными словами, устройство увеличивает интервал между периодическими появлениями временного ресурса (т.е. интервал между периодическими появлениями окон DRX) вместо того, чтобы полностью отменить контроль этого ресурса, так и в случае возобновления передач прямого сигнала управления. Действительно, в ответ на обнаружение, что передача прямых сигналов управления на этом временном ресурсе возобновилась, первое устройство 14-1 снова уменьшает период этого временного ресурса.
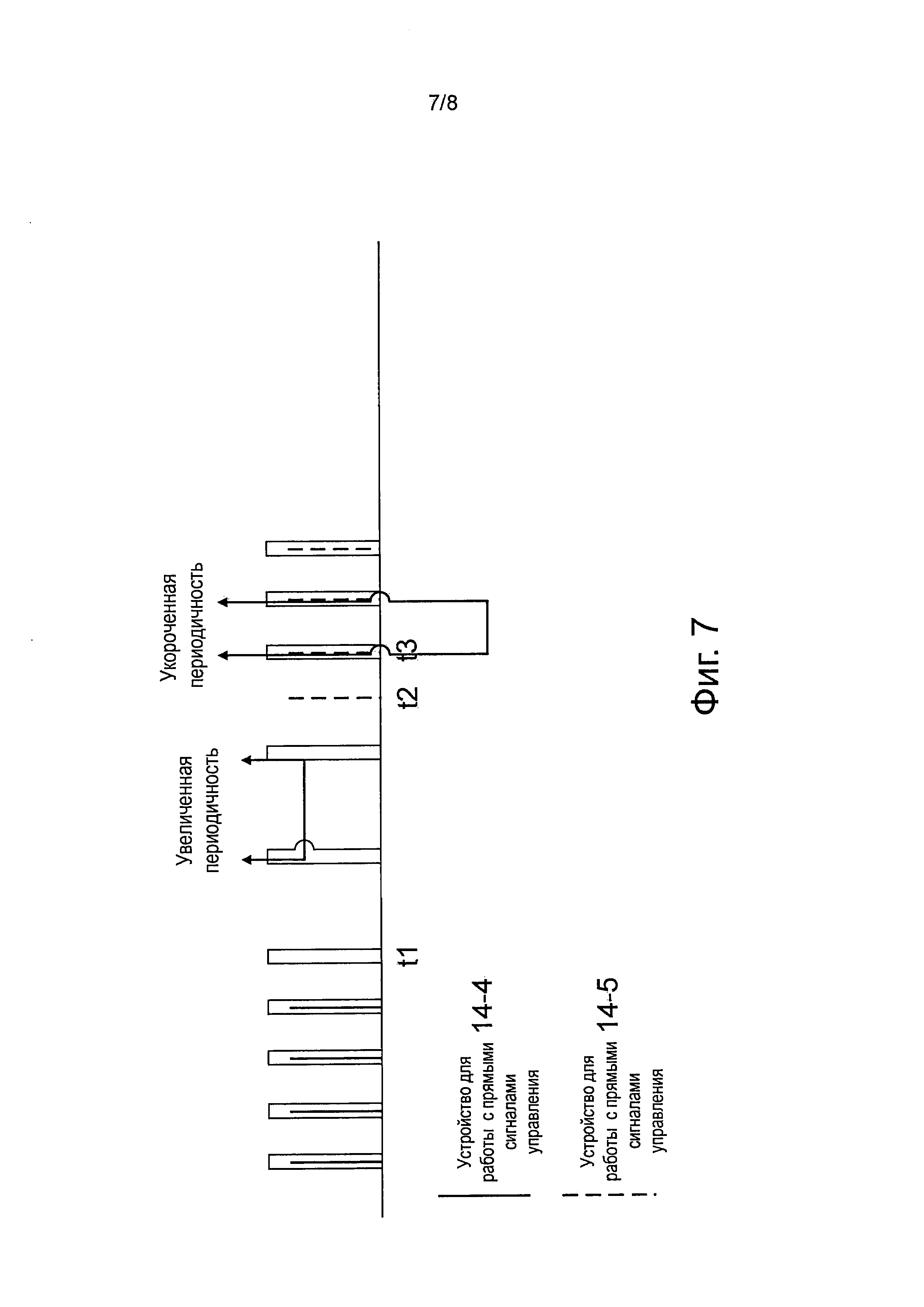
Фиг. 7 иллюстрирует эти варианты простым примером. Как показано, первое устройство 14-1 номинально конфигурировано для работы в активном состоянии в течение периодически появляющихся временных ресурсов, которые близко (с небольшим припуском) охватывают интервалы времени, в которых первое устройство 14-1 ожидает приема сигналов управления от устройств из состава группы 12-2 и в том числе от показанного устройства 14-4. В момент времени t1 первое устройство 14-1 определяет, что в течение этого временного ресурса не было принято ни одного прямого сигнала управления. В ответ на это, первое устройство 14-1 увеличивает период этого временного ресурса (т.е. этот период этого ресурса становится, как показано, длиннее). После этого, в момент времени t2, другое устройство 14-5 в группе 12-2 начинает передачу прямых сигналов управления. Первое устройство 14-1 пропускает первый из этих прямых сигналов управления, переданный именно в этот момент времени t2, поскольку первое устройство 14-1 сберегает энергию за счет увеличения периода. Однако в момент времени t3 первое устройство 14-1 принимает передачу прямого сигнала управления от устройства 14-5 и возобновляет активизацию с уменьшенным периодом, как и до этого.
В одной конкретной реализации таких вариантов первое устройство 14-1 «сбрасывает» таймер в начальное состояния, когда будут обнаружены прямые сигналы управления, соответствующие некоторым моментам времени и окно DRX. Если отсчет таймера превысит некоторую величину раньше, чем будет принят новый прямой сигнал управления в пределах того же самого окна DRX (т.е. в течение некоторого промежутка времени в пределах этого окна DRX не будут приняты какие-либо новые прямые сигналы управления), интервал между окнами DRX увеличивают. Это делается для сбережения энергии в устройстве и для обеспечения возможности обнаружить возобновление активности с использованием этого ресурса через некоторое время. Если активность возобновилась, то в некоторых вариантах снова уменьшают интервал контроля, т.е. интервал между окнами DRX.
Отметим, что в одном или нескольких вариантах могут быть различные диапазоны возможных величин расхождения между опорным синхросигналом какой-либо группы и общим опорным синхросигналом. Эти различные диапазоны могут быть, например, ассоциированы с разными ресурсами, конфигурированными для передачи прямых сигналов управления между устройствами.
На Фиг. 8 показан пример варианта устройства 14 радиосвязи в свете рассмотренных выше модификаций и изменений. Устройство 14 радиосвязи содержит одну или несколько процессорных схем 30, конфигурированных для осуществления способа, показанного на Фиг. 3 и/или Фиг. 5. Это устройство 14 радиосвязи содержит также одну или несколько радиоприемопередающих схем 32 для передачи и приема радиосигналов. Указанные одна или несколько радиоприемопередающих схем 32, например, содержат разнообразные высокочастотные компоненты (не показаны) для приема и обработки радиосигналов от других узлов радиосвязи через одну или несколько антенн с использованием известных способов обработки сигналов. Примечательно, что эти одна или несколько радиоприемопередающих схем 32 также конфигурированы для прямой передачи и приема радиосигналов к/от других устройств 14 радиосвязи, т.е. посредством межмашинной связи.
Устройство 14 радиосвязи в некоторых вариантах содержит также одно или несколько запоминающих устройств 34 для хранения программного обеспечения, которое должны выполнять, например, указанные одна или несколько процессорных схем 30. Это программное обеспечение содержит команды, позволяющие, одной или нескольким процессорным схемам 30 осуществлять способ, как показано на Фиг. 3 и/или Фиг. 5. Запоминающее устройство 34 может представлять собой накопитель на жестком диске, магнитный носитель для хранения информации, дискету или диск для портативного компьютера, устройство флэш-памяти, запоминающее устройство с произвольной выборкой (random access memory (RAM)) или другое подобное устройство. Кроме того, запоминающее устройство 34 может представлять собой внутреннюю регистровую память процессора.
Безусловно, не все этапы описываемых здесь способов обязательно выполнять в одном микропроцессоре или даже в одном модуле. Таким образом, более обобщенная схема управления, конфигурированная для осуществления описанных выше операций, может иметь физическую конфигурацию, соответствующую непосредственно процессорной схеме(ам) 30, или может быть реализована в виде двух или более модулей или блоков. Устройство 14 радиосвязи может, например, содержать различные функциональные блоки, каждый из которых конфигурирован для осуществления конкретного этапа, показанного на Фиг. 3 и/или Фиг. 5.
Специалисты в рассматриваемой области должны также понимать, что рассматриваемые здесь варианты содержат также соответствующую компьютерную программу. Эта компьютерная программа содержит команды, при выполнении которых по меньшей мере одним процессором в составе устройства 14 радиосвязи это устройство 14 осуществляет какие-либо из описываемых здесь процессов обработки сигналов и данных. В состав этих вариантов входит также носитель, содержащий такую компьютерную программу. Этот носитель может содержать электронный сигнал, оптический сигнал, радиосигнал или компьютерный носитель для хранения информации. Специалисты в рассматриваемой области должны также понимать, что такая компьютерная программа согласно некоторым вариантам содержит один или несколько модулей кода, записанных в запоминающем устройстве 34, где каждый модуль конфигурирован для осуществления какого-либо конкретного этапа, показанного на Фиг. 3 и/или Фиг. 5.
Как описано здесь, термин «устройство радиосвязи» 14 обозначает какое-либо устройство, конфигурированное для связи по радио с другим узлом связи и для непосредственной (прямой) связи с другим таким устройством 14 радиосвязи (т.е. посредством межмашинной связи). Поэтому устройство 14 радиосвязи может представлять собой абонентский терминал (user equipment (UE)), мобильный телефон, сотовый телефон, персональный цифровой помощник (Personal Digital Assistant (PDA)), оснащенный функциями радиосвязи, смартфон, портативный компьютер или персональный компьютер (personal computer (PC)), оснащенный внутренним или внешним мобильным широкополосным модемом, планшетный компьютер с функциями радиосвязи, портативное электронное устройство радиосвязи, сенсорное устройство, оснащенное функциями радиосвязи, устройство для межмашинной связи или другое подобное устройство.
Кроме того, как используется здесь, термин «узел сети радиосвязи» обозначает узел радиосвязи, являющийся частью сети 20 радиодоступа. Узел сети радиосвязи, например, представляет собой узел eNB согласно стандарту LTE, управляющий узел, осуществляющий управление одним или несколькими удаленными радиоблоками (remote radio unit (RRU)), базовую радиостанцию 16, точку доступа или другое подобное устройство. Такой узел сети радиосвязи в некоторых вариантах конфигурирован для работы в так называемой полосе частот системы. Часть этой полосы системы зарезервирована, статически или динамически, для межмашинной (D2D) связи. Следовательно, полоса прямых сигналов управления (DC) доступна для назначения, например, сообщениям относительно прямых сигналов управления.
Далее, как используется здесь, термин опорный синхросигнал охватывает любой опорный сигнал во временной области, служащий общим источником для синхронизации во временной области. Опорный синхросигнал может содержать, например, указание моментов времени, ограничивающих окно передачи или приема. В системе LTE, например, такой сигнал в некоторых вариантах содержит указание времени субкадра LTE.
Кроме того, различные ресурсы для передачи прямых сигналов управления, описываемые здесь, в некоторых вариантах имеют одинаковую ширину временного окна. В других же вариантах различные ресурсы для передачи прямых сигналов управления ассоциированы с временными окнами разной ширины.
Специалисты в рассматриваемой области должны также понимать, что разнообразные «схемы», описываемые здесь, могут обозначать сочетания аналоговых и цифровых схем, включая один или несколько процессоров, конфигурированных с использованием загружаемого программного обеспечения, сохраняемого в запоминающем устройстве, и/или встроенного программного обеспечения, сохраняемого в запоминающем устройстве, так что при выполнении этого программного обеспечения один или несколько процессоров осуществляют описанные выше способы. Указанные один или несколько процессоров, равно как и другая цифровая аппаратура, могут быть реализованы в виде одной специализированной интегральной схемы (application-specific integrated circuit (ASIC)), либо несколько процессоров и разнообразная цифровая аппаратура могут быть распределены между несколькими раздельными компонентами, независимо от того, смонтированы ли они в индивидуальных корпусах или собраны в одну систему на кристалле (system-on-a-chip (SoC)).
Таким образом, специалисты в рассматриваемой области должны понимать, что настоящее изобретение может быть также реализовано и другими способами, отличными от тех, какие конкретно описаны здесь, не отклоняясь от существенных признаков настоящего изобретения. Более того, указанные выше варианты могут быть осуществлены независимо или в сочетаниях одни с другими. Такими образом, представленные варианты следует считать во всех отношениях лишь иллюстративными, но никак не ограничивающими.

Способы и устройства в системе беспроводной связи
Способ и устройство в сети радиодоступа
Устройства и способы подстройки частоты в синтезаторе частот с множеством выходов
Идентификация процедуры ранжирования улучшенного беспроводного терминала
Способ и устройство управления ресурсами передачи в процессах автоматических запросов на повторную передачу
Способ и устройство для последовательного вычитания помех с помощью обработки матрицы корня ковариации
Повышение надежности протокола гибридного автоматического запроса на повторную передачу данных
Способ и устройство для осуществления связи по радиоканалу
Способ и устройство достоверного определения весовых коэффициентов в системе cdma с помехами
Способ связи между платформами
Способы и устройства в системе беспроводной связи
Способ и устройство в сети радиодоступа
Устройства и способы подстройки частоты в синтезаторе частот с множеством выходов
Идентификация процедуры ранжирования улучшенного беспроводного терминала
Способ и устройство управления ресурсами передачи в процессах автоматических запросов на повторную передачу
Способ и устройство передач по нисходящей линии связи с линейным предварительным кодированием для уменьшения влияния изменений помех во времени
Способ и устройство для последовательного вычитания помех с помощью обработки матрицы корня ковариации
Способы и устройства для уведомления о чрезвычайных ситуациях
Повышение надежности протокола гибридного автоматического запроса на повторную передачу данных
Способ и устройство для осуществления связи по радиоканалу

