Результат интеллектуальной деятельности: ТРЕХМЕРНОЕ ПОЛИЛИНЕЙНОЕ СОВМЕЩЕНИЕ С ИСПОЛЬЗОВАНИЕМ ОГРАНИЧЕНИЙ ФОРМЫ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к области медицинской визуализации, в частности к трехмерному совмещению с использованием подбора форм.
УРОВЕНЬ ТЕХНИКИ
Технология оптического измерения формы обеспечивает 3-мерную форму оптического волокна. Посредством интегрирования упомянутого волокна в интервенционные устройства можно получать представление о форме устройства вплоть до точки, очень близкой к наконечнику устройства. Однако знания одной только формы недостаточно: форму нужно помещать в контекст данных допроцедурной и/или внутрипроцедурной визуализации (т.е. совмещать с упомянутыми данными). Обеспечение правильного (т.е. точного) совмещения между системой координат системы измерения формы и системой координат данных допроцедурной и/или внутрипроцедурной визуализации имеет большое значение для применения и выбора технологии измерения формы.
В рамках одного применения технологии измерения формы, измеряющее форму оптическое волокно можно интегрировать в кабель-трос, прикрепленный к хирургическому инструменту, и/или в сам инструмент и использовать для отслеживания инструмента. Волоконно-оптически отслеживаемое устройство вводят эндоваскулярно или эндолюминально. Чтобы использовать оптическое волокно для отслеживания инструмента, требуется исходное совмещение системы координат оптического волокна с опорной системой координат. Опорная система координат может быть, например, 3-мерной анатомической моделью, полученной в результате сегментации изображения, полученного методом конусно-лучевой компьютерной томографии (КЛКТ-изображения).
Если используют исходное совмещение между виртуальным устройством из измеряющего форму волокна и данными допроцедурной и внутрипроцедурной визуализации, то несовмещение может вызываться различными эффектами. Упомянутые эффекты включают в себя: неточность реконструкции формы (даже незначительные погрешности реконструкции формы могут вызывать значительное несовмещение), перемещение точки старта (если точка старта системы измерения формы перемещается во время процедуры, то форма в целом будет перемещаться, вызывая несовмещение) и перемещение пациента (любое перемещение пациентом после исходного совмещения будет вызывать несовмещение координат измерения формы и координат данных изображения).
Одно решение по несовмещению, вызванному после или во время исходного совмещения, состоит в повторном совмещении систем координат на основании рентгеновской визуализации в реальном времени. Однако облучение рентгеновским излучением следует ограничивать из-за его вредных последствий. Кроме того, рентгеновская визуализация обеспечивает только 2-мерную проекцию устройства, и точная связь между 2-мерной проекцией и волокном внутри устройства не известна, но может быть только оценочной.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Предлагаются система и способ для совмещения системы координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации. В соответствии с одним вариантом осуществления, в ходе реконструкции для измерения формы обнаруживаются трехмерные формы, которые могут быть идентифицированы по их криволинейности и являются постоянными с течением времени, хотя не обязательно в одном и том же положении вдоль трехмерной формы. Если две формы с течением времени или из разных источников визуализации имеют упомянутую одинаковую обнаружимую криволинейность, их системы координат можно совместить на основе переноса и поворота посредством согласования криволинейностей.
В целях настоящей заявки, термины форма и кривая используются для описания трехмерной кривой из реконструкции формы, соответствующей форме измеряющего форму оптического волокна, расположенного в хирургическом инструменте или прикрепленного к нему. Термин криволинейность используется для описания формы составляющего сегмента трехмерной кривой. Термин изгиб используется для описания непрямой криволинейности с одиночным изменением или инверсией направления.
В соответствии с одним аспектом настоящего изобретения предлагается система для совмещения системы координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации. Система содержит один или более хирургический инструмент, включающий в себя оптическое волокно с измеряющими форму сенсорами. Оптическая консоль имеет рабочее соединение с оптическим волокном и опрашивает измеряющие форму сенсоры и определяет трехмерную форму инструмента по отраженным сигналам. Процессор совмещает систему координат измеряющего форму волокна с системой координат данных визуализации посредством подбора стабильной криволинейности в оптическом волокне соответственно криволинейности из другого источника и согласует подобранные криволинейности.
В соответствии с одним вариантом осуществления, другой источник является другим средством визуализации. В соответствии с одним вариантом осуществления, другое средство визуализации является вычисленным изображением из данных допроцедурной или внутрипроцедурной визуализации.
В соответствии с одним вариантом осуществления, процессор является также процессором, который обрабатывает данные допроцедурной или внутрипроцедурной визуализации.
В соответствии с одним вариантом осуществления, другой источник является осевой линией из сегментированной допроцедурной или внутрипроцедурной визуализации.
В соответствии с одним вариантом осуществления, другой источник является реконструкцией формы в другой момент времени.
В соответствии с одним вариантом осуществления, другой источник является реконструкцией формы из другого измеряющего форму волокна. Например, можно использовать многокабельное отслеживание для катетера с возможностью измерения формы и для проволочного направителя с возможностью измерения формы внутри катетера.
В соответствии с другим аспектом настоящего изобретения предлагается способ совмещения системы координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации. В реконструированном изображении инструмента, снабженного измеряющим форму волокном, идентифицируют стабильную криволинейность. Стабильную криволинейность подбирают соответственно криволинейности из другого источника. Затем подобранные криволинейности согласуют.
В соответствии с одним вариантом осуществления, стабильную криволинейность и криволинейность из другого источника подбирают сравнением радиусов изгибов.
В соответствии с одним вариантом осуществления, стабильную криволинейность и криволинейность из другого источника подбирают сравнением градиентов координат в криволинейности.
В соответствии с одним вариантом осуществления, другой источник является другим средством визуализации.
В соответствии с одним вариантом осуществления, другое средство визуализации является вычисленным изображением из данных допроцедурной или внутрипроцедурной визуализации.
В соответствии с одним вариантом осуществления, другой источник является осевой линией из сегментированной допроцедурной или внутрипроцедурной визуализации.
В соответствии с одним вариантом осуществления, другой источник является реконструкцией формы в другой момент времени.
В соответствии с одним вариантом осуществления по меньшей мере два измеряющих форму волокна используют одновременно во время хирургической процедуры, и другой источник является реконструкцией формы из другого измеряющего форму волокна.
В соответствии с одним вариантом осуществления, этап идентификации стабильной криволинейности содержит этапы: измерения радиуса по меньшей мере одного изгиба в форме реконструированного изображения инструмента, снабженного измеряющим форму волокном; сравнения радиуса изгиба из последующего реконструированного изображения с радиусом изгиба из предыдущего реконструированного изображения инструмента, снабженного измеряющим форму волокном; определения, удовлетворяют ли радиусы изгибов предварительно заданным критериям подбора; и сохранения радиуса и местоположения изгиба, если критерии подбора удовлетворяются.
В соответствии с другим аспектом настоящего изобретения предлагается компьютерный программный продукт для совмещения системы координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации. Программный продукт кодирован: программными командами для идентификации стабильной криволинейности в инструменте, снабженном измеряющим форму волокном; программными командами для подбора стабильной криволинейности соответственно криволинейности из другого источника; и программными командами для согласования подобранных криволинейностей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества изобретения будут очевидны из нижеследующего подробного описания предпочтительных вариантов осуществления при истолковании в связи с чертежами:
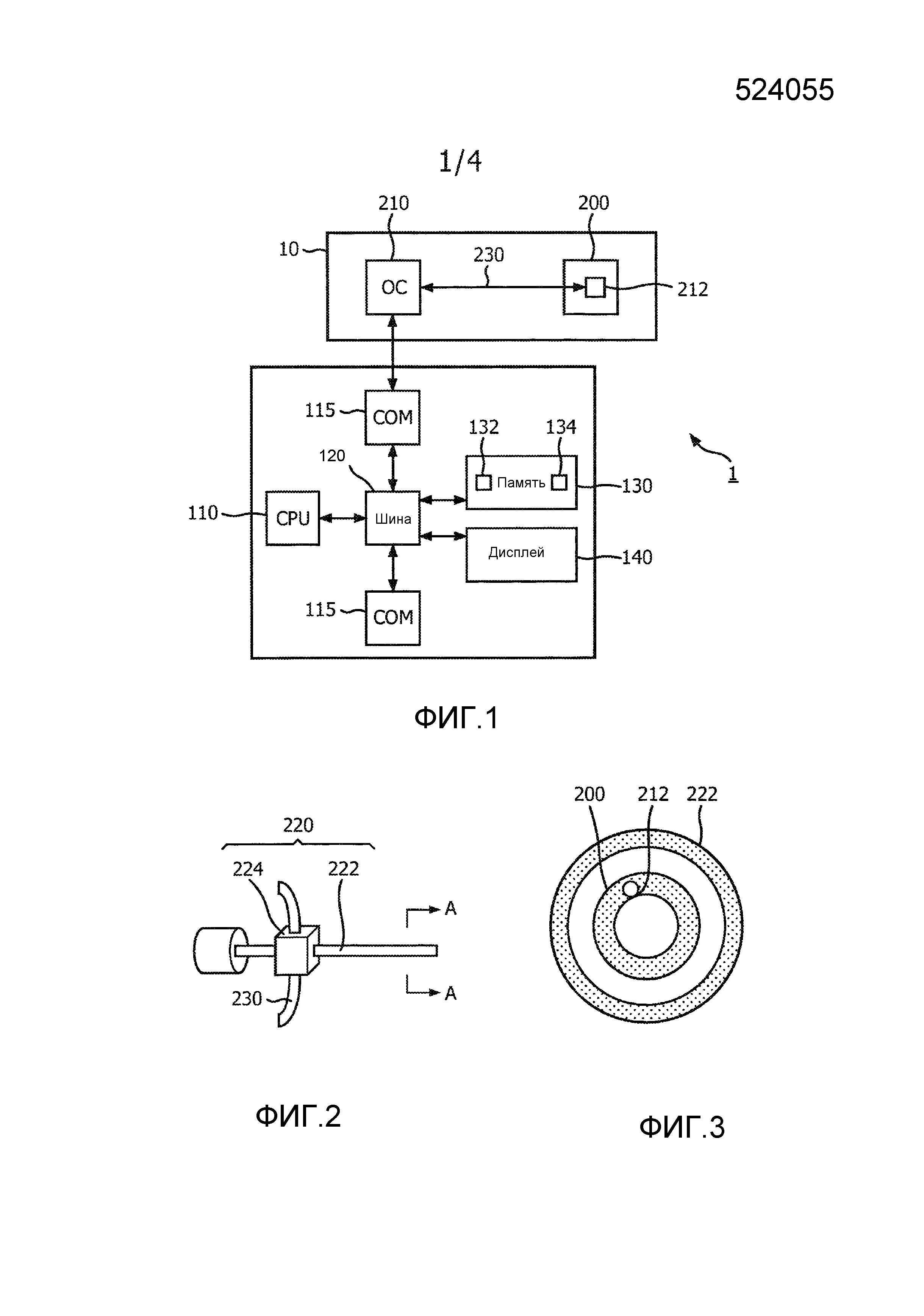
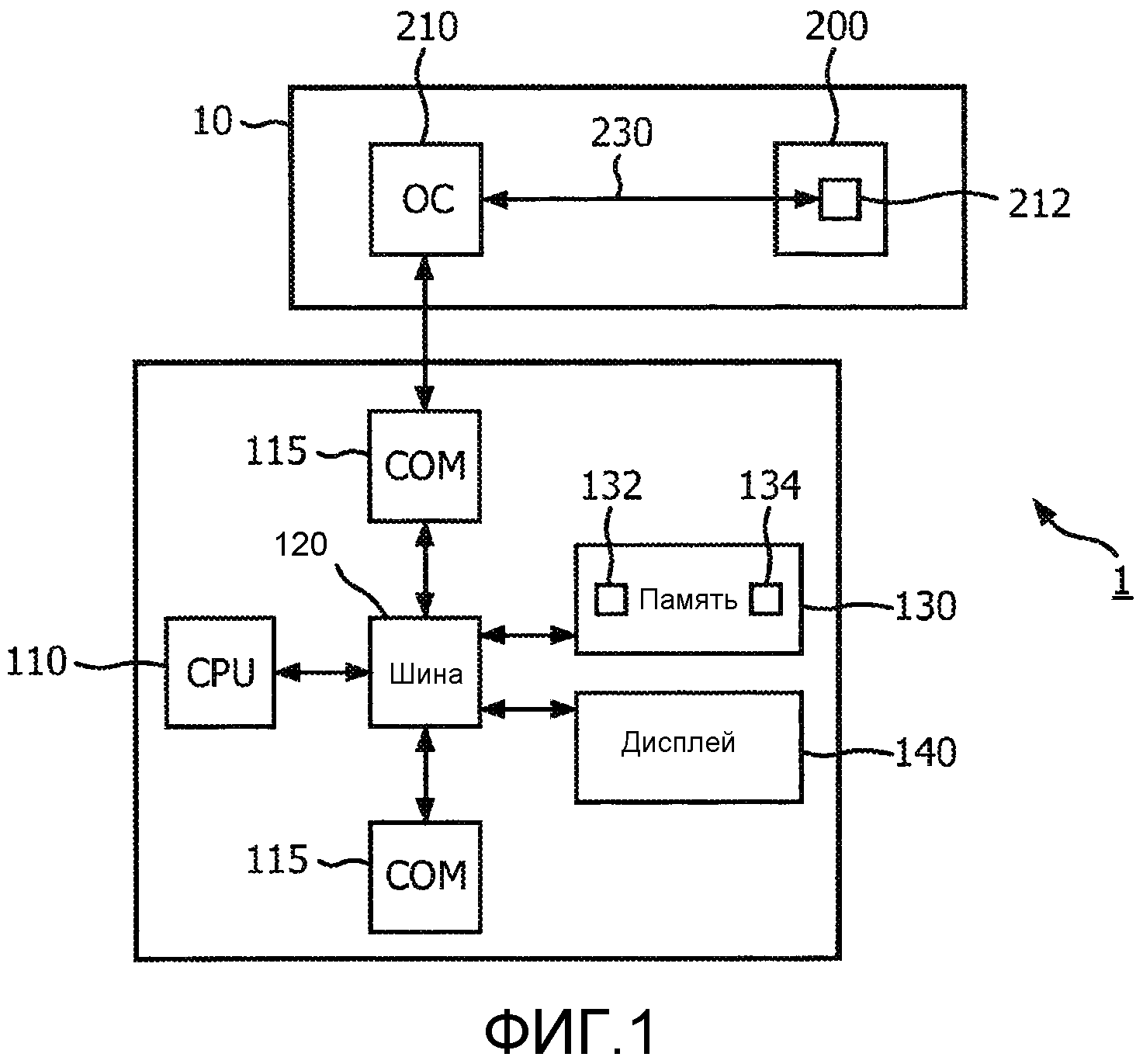
Фиг. 1 - блок-схема системы для совмещения системы координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации посредством подбора и согласования стабильной формы из разных источников в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 2 - вид сбоку инструмента и интродуктора из системы на фиг. 1 в соответствии с вариантом осуществления настоящего изобретения;
Фиг. 3 - сечение инструмента и интродуктора, показанных на фиг. 2, взятое по линии сечения A-A на фиг. 2;
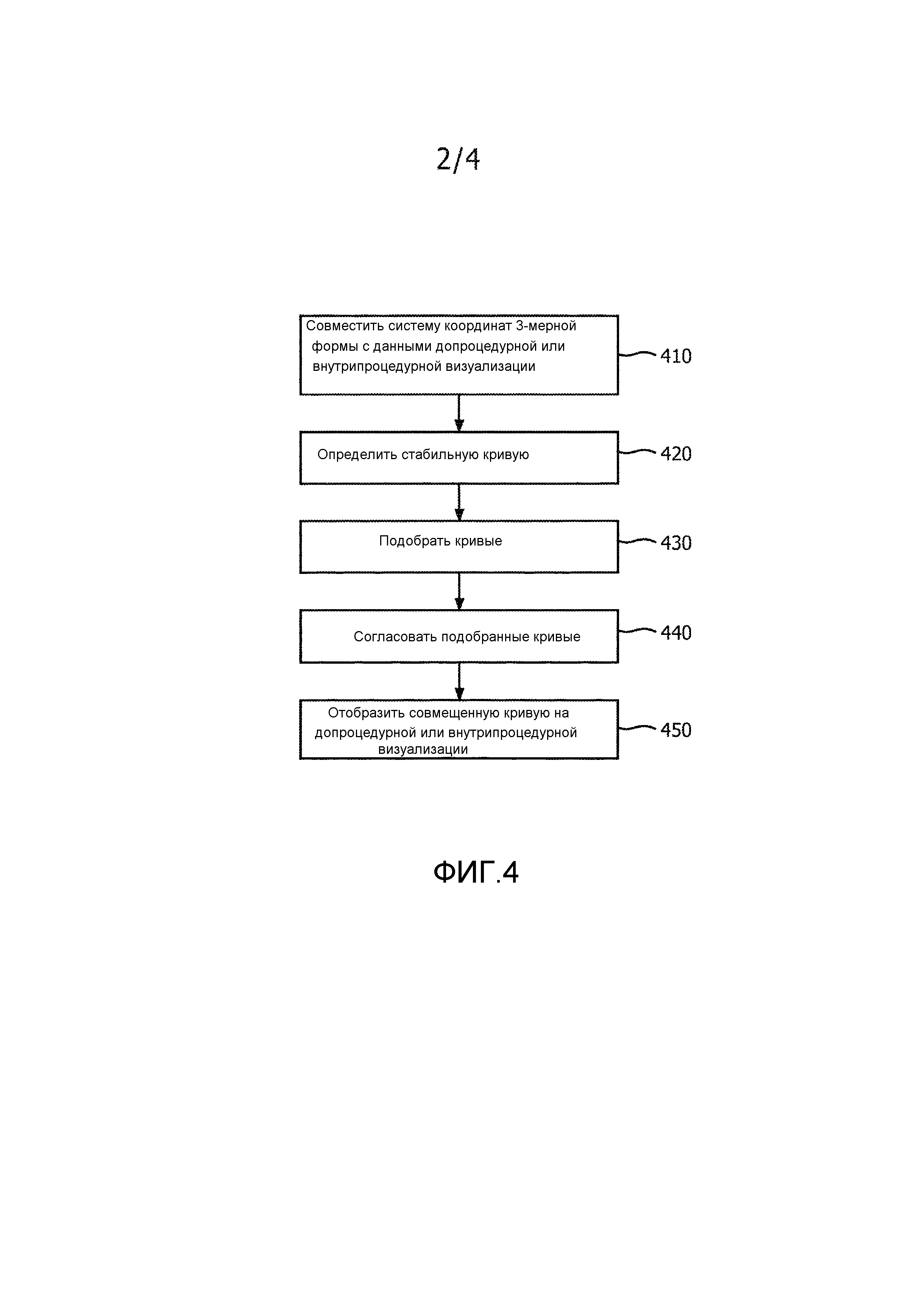
Фиг. 4 - блок-схема последовательности операций способа совмещения системы координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации посредством подбора и согласования стабильной формы из разных источников в соответствии с вариантом осуществления настоящего изобретения;
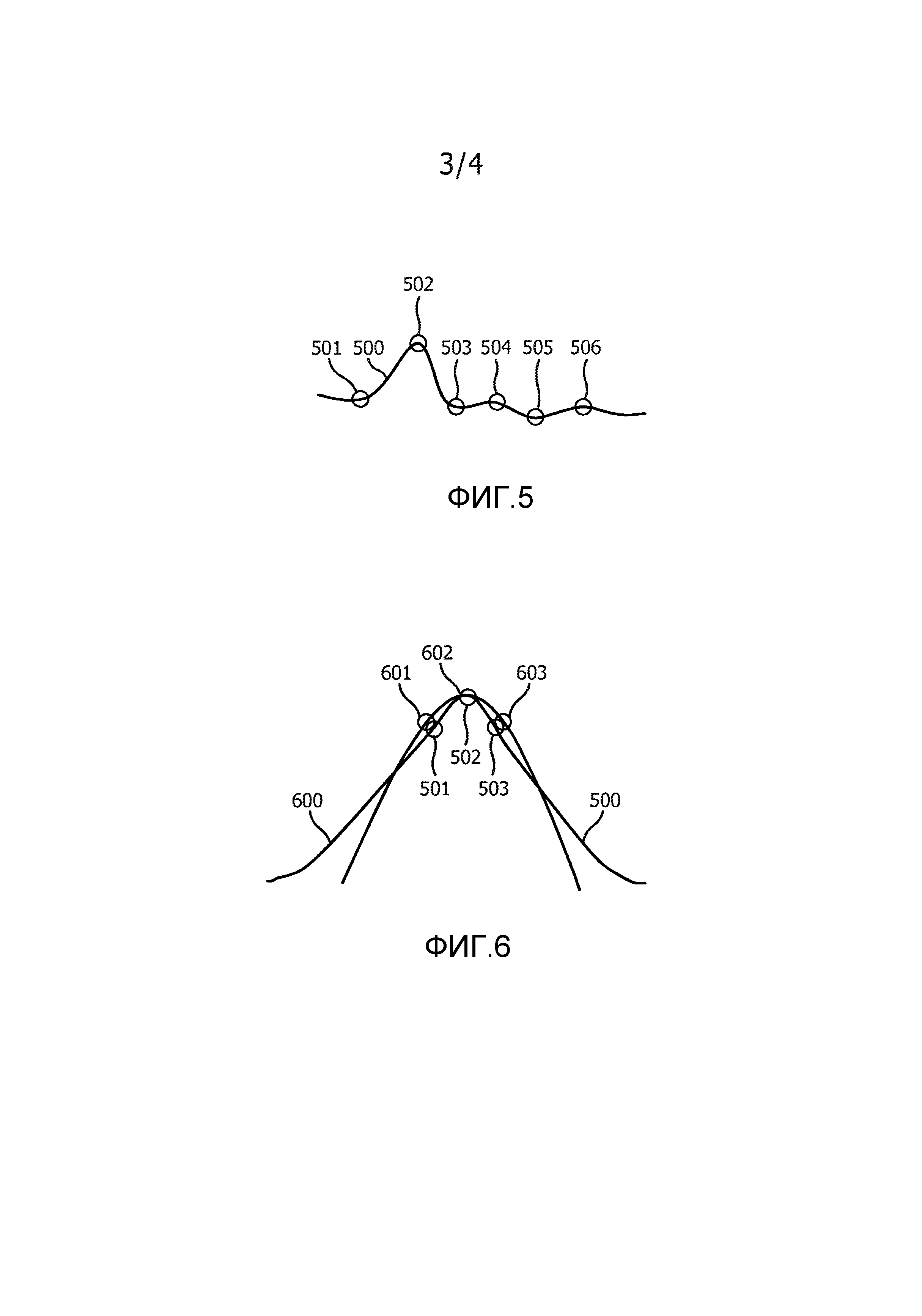
Фиг. 5 - вид полилинейной кривой, представляющей различные изгибы измеряющего форму волокна;
Фиг. 6 - представление этапа согласования подобранных кривых в соответствии с вариантом осуществления настоящего изобретения; и
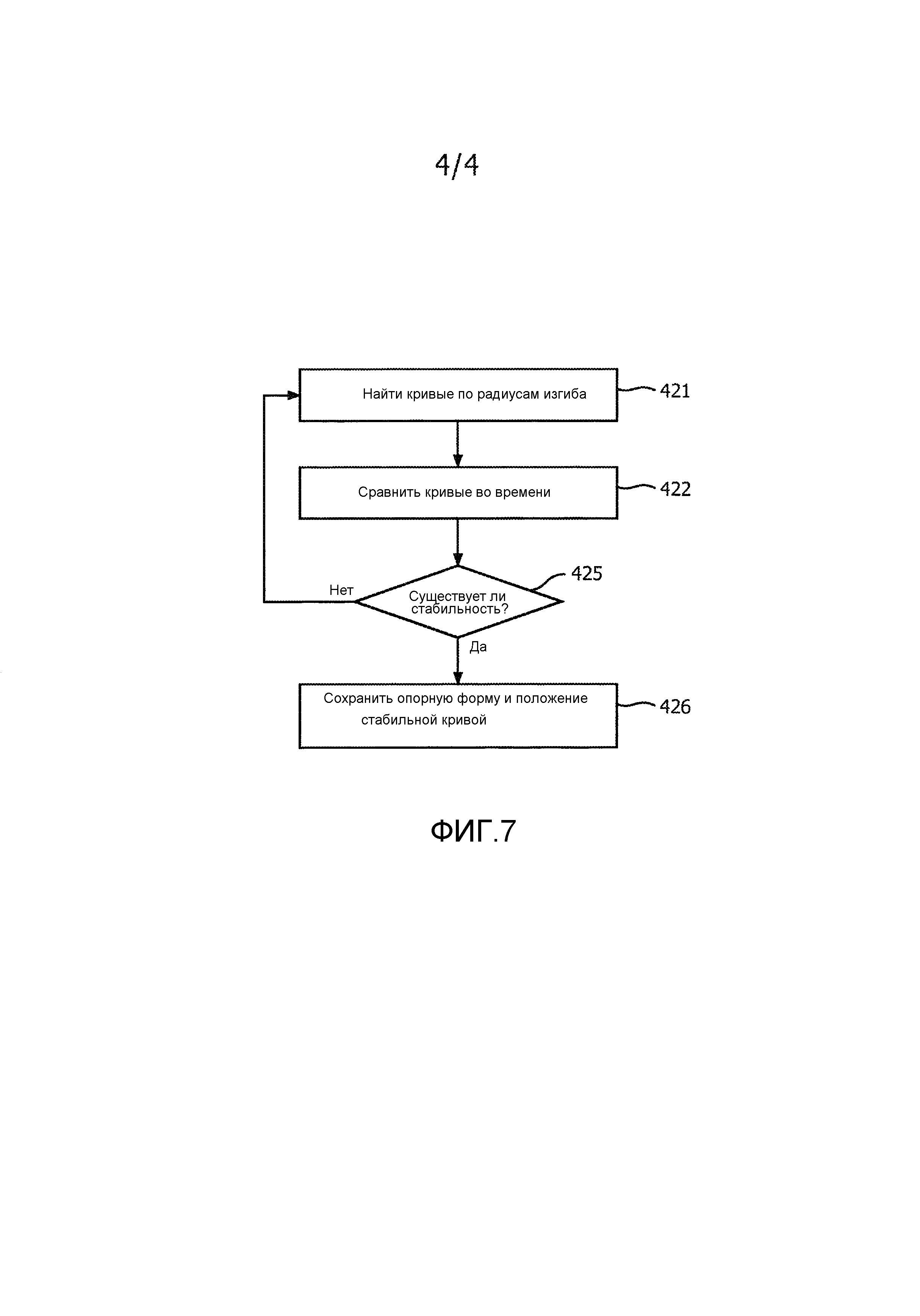
Фиг. 7 - блок-схема последовательности операций способа стабильной кривой в соответствии с вариантом осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение обеспечивает способ и систему для совмещения системы координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации посредством подбора и согласования стабильных криволинейностей из разных источников. Стабильность криволинейности выводят из физических ограничений на измеряющее форму волокно, расположенное в хирургическом инструменте или прикрепленное к нему. Физические ограничения могут обеспечиваться, например, жесткой изогнутой гильзой интродуктора или анатомическими структурами, которые не деформируются вследствие введения инструмента.
В соответствии с одним вариантом осуществления в ходе реконструкции для измерения формы обнаруживаются трехмерные формы, которые могут быть идентифицированы по их криволинейности и являются постоянными с течением времени, хотя не обязательно в одном и том же положении вдоль трехмерной формы. Если две формы с течением времени или из разных источников визуализации имеют упомянутую одинаковую обнаружимую криволинейность, то их системы координат можно совместить на основе переноса и поворота посредством согласования криволинейностей.
Фиг. 1 представляет блок-схему системы 1 визуализации, которая совмещает систему координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации посредством подбора и согласования стабильной формы из разных источников. В соответствии с одним вариантом осуществления настоящего изобретения, система 1 визуализации включает в себя систему 10 измерения формы, которая используется при совмещении системы координат для измерения формы с другой системой координат. Другая система координат может быть, например, системой координат данных допроцедурной или внутрипроцедурной визуализации.
Система 10 измерения формы содержит измеряющее форму волокно 212, расположенное в хирургическом инструменте 200 или прикрепленное к нему. Инструмент 200 может быть любым инструментом, применяемым во время вмешательства, включая, но без ограничения: механический скальпель (ланцет), лазерный скальпель, эндоскоп, микроскопические видеозонды, хирургический сшивающий аппарат, ретрактор, устройство каутеризации (электрическое или оптическое), катетер, медицинское долото, зажим, зонд, троакар, ножницы или подобный инструмент. Инструмент 200 поддается манипуляциям, производимым врачом, для выполнения интервенционной процедуры. В ходе многих интервенционных процедур врач будет использовать по меньшей мере два инструмента. Следовательно, в соответствии с одним вариантом осуществления, система 10 измерения формы содержит по меньшей мере два инструмента 200.
Инструмент 200 можно вводить в пациента эндолюминально или эндоваскулярно посредством интродуктора 220, который может содержать одну или более гибких и/или жестких гильз, по которым можно вводить или отводить инструмент 200. В соответствии с одним вариантом осуществления, показанным на фиг. 2 и 3, инструмент 200 расположен в гибкой гильзе 222, которая расположена в более короткой жесткой гильзе 224, используемой для введения инструмента и гибкой гильзы в просвет или сосудистую систему тела.
Измеряющее форму волокно 212 формирует вместе с оптической консолью 210 систему 10 измерения формы, которая обеспечивает информацию о деформации. Оптическая консоль 210 имеет рабочее соединение с измеряющим форму волокном 212. Например, измеряющее форму волокно 212 может соединяться с оптической консолью в оптическом соединителе. Измеряющее форму волокно 212 является оптическим волокном. Множество оптических рассеивателей (например, волоконных брэгговских дифракционных решеток или релеевских рассеивателей) может быть распределено по длине оптического волокна в сердцевине или оболочке, чтобы сформировать сенсоры или датчики для измерения деформации. Оптическая консоль 210 опрашивает оптическое волокно посредством посылки широкополосного оптического сигнала по сердцевине оптического волокна и измерения отраженных длин волн, чтобы определять деформацию по длине волны в сердцевине оптического волокна. В качестве альтернативы, спектр отражения можно получать от узкополосного источника света, в соответствии с чем осуществляют качание длины волны во времени. Затем данные по деформации используют для вычисления локальной криволинейности в каждом сенсоре, и данные по криволинейности компилируют для вычисления трехмерной формы измеряющего форму волокна 212, которая соответствует форме инструмента, в котором расположено измеряющее форму волокно или к которому прикреплено измеряющее форму волокно. Оптическая консоль 210 может включать в себя процессор и может обрабатывать данные по длинам волн и деформациям из сенсоров. В качестве альтернативы, оптическая консоль может пересылать данные по длинам волн и деформациям в систему обработки данных, отдельную от оптической консоли, для обработки.
Система 1 визуализации дополнительно содержит процессор 110, память 130, имеющую рабочее соединение с процессором, например, по системной шине 120, и соединители 115 ввода/вывода (I/O-соединители), которые функционально соединяют систему 10 измерения формы с процессором 110. Процессор 110 может быть любым устройством, способным выполнять программные команды, например, одним или более микропроцессорами. Кроме того, процессор 110 может быть встроен в универсальный компьютер.
Память 130 может быть любым энергозависимым или энергонезависимым запоминающим устройством, пригодным для хранения данных и программных команд, например съемным диском, жестким диском, компакт-диском (CD), оперативной памятью (RAM), постоянной памятью (ROM) и т.п. Кроме того, память 130 может содержать одно или более запоминающих устройств.
I/O-соединители 115 могут быть любым аппаратным обеспечением, которое функционально соединяет процессор 110 с системой 210 измерения формы, другим компьютером или источником данных. I/O-соединители могут включать в себя, но без ограничения, последовательный интерфейс RS232, сеть Ethernet и порты USB.
Система 100 обработки данных дополнительно содержит программу 132 визуализации, хранящуюся в памяти 130 и выполняемую процессором 110, для приема и обработки данных визуализации из системы 10 измерения формы и для отображения изображений на дисплее 140. Программа 132 визуализации может включать в себя модули или блоки для различных функций обработки изображений.
Система 100 обработки данных дополнительно содержит программу 134 совмещения, хранящуюся в памяти 130 и выполняемую процессором 110, для совмещения системы координат системы 10 измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации. Данные визуализации могут быть записанными в памяти данными визуализации или данными визуализации в реальном времени из системы магнитно-резонансной визуализации (МРВ), рентгеновской, ультразвуковой или любого другого типа визуализации, пригодной для получения изображений анатомических структур. В соответствии с одним вариантом осуществления, данные системы визуализации содержат объем трехмерного изображения.
Программа 134 совмещения может быть частью программы 132 визуализации, автономной программой или подпрограммой, вызываемой программой визуализации.
Программа 134 совмещения определяет стабильную криволинейность. Затем, программа 134 совмещения подбирает криволинейность из другого источника соответственно стабильной криволинейности и согласует подобранные криволинейности. Другим источником могут быть данные из системы 10 измерения формы в другое время (временное сравнение). В качестве альтернативы, другим источником могут быть данные визуализации из другого средства визуализации.
В соответствии с другим вариантом осуществления, другим источником может быть реконструкция из другого измеряющего форму волокна, расположенного или прикрепленного в/к конструкции, подчиняющегося таким же ограничениям в отношении формы, как первое измеряющее форму волокно. Например, одно измеряющее форму волокно может располагаться в инструменте, например катетере, или быть прикрепленным к нему, и другое измеряющее форму волокно может быть встроено в проволочный направитель внутри катетера и тем самым подчиняться таким же ограничениям в отношении формы.
Фиг. 4 представляет блок-схему последовательности операций способа совмещения системы координат системы измерения формы с системой координат данных допроцедурной или внутрипроцедурной визуализации посредством подбора и согласования стабильной криволинейности из разных источников в соответствии с вариантом осуществления настоящего изобретения.
В соответствии с одним вариантом осуществления, программа 134 совмещения выполняет исходное согласование системы координат системы 10 измерения формы с системой координат из данных допроцедурной или внутрипроцедурной визуализации (этап 410). Исходное совмещение можно выполнять с использованием любого из множества различных известных способов. Например, исходное совмещение можно выполнять посредством прикосновения инструментом с возможностью измерения формы к реперной метке или анатомической опорной точке, соответствующей идентифицируемым точкам в данных визуализации.
Программа 134 совмещения определяет стабильную криволинейность (этап 420). Для определения стабильной криволинейности программа совмещения сначала идентифицирует кривую в измеряющем форму волокне 212. Измеряющее форму волокно 212 обеспечивает полилинейную кривую 500, как показано на фиг. 5. Полилинейная кривая является кривой, сформированной несколькими точками (соответствующими местоположениям сенсоров), при каждой точке, следующей на измеряющем форму волокне 212 за предыдущей точкой.
Этап 420 определения стабильной криволинейности подробно показан на фиг. 5. Программа 134 совмещения идентифицирует изгибы 501-506 на полилинейной кривой 500 (этап 421). Чтобы идентифицировать изгибы, программа совмещения определяет радиусы изгибов полилинейной кривой 500. Радиусы изгибов можно определить проверкой скорости изменения и направления криволинейности вдоль точек полилинейной кривой 500. Скорость изменения и направление криволинейности можно определять, например, из данных по деформации. В качестве альтернативы, программа 134 совмещения может определять радиусы изгибов путем взятия трех точек на полилинейной кривой с предварительно заданным(ой) интервалом или частотой отсчетов и вычисления расстояния от средней точки до вектора от первой точки до последней точки в качестве показателя криволинейности.
В соответствии с другим вариантом осуществления, криволинейности можно определять вычислением градиента координат на полилинейной кривой.
Программа 134 совмещения сравнивает криволинейности во времени (т.е. по последовательным реконструкциям формы) для убеждения в том, что изгиб является стабильным (этап 422). Для клинических целей предпочтителен изгиб, расположенный как можно более дистально вдоль формы, так как смещение наконечника инструмента относительно изгиба будет минимизироваться. Если расстояние от начала формы до стабильного физического ограничения на инструмент (и измеряющее форму волокно) известно, например, благодаря использованию изогнутого интродуктора, то окно поиска радиусов изгиба может ограничиваться положениями на геодезическом расстоянии для известного стабильного физического ограничения.
Программа совмещения определяет, является ли или нет криволинейность или изгиб стабильной(ым) (этап 425). Если радиусы изгиба из последующих реконструкций формы совпадают в пределах предварительно заданного допуска на погрешность, то криволинейность определяется как стабильная (переход «Да» с этапа 4125). Если криволинейность не является стабильной (переход «Нет» с этапа 425), то проверяются дополнительные изгибы (этап 421).
Возвращаясь к фиг. 4, после того, как определяют стабильную криволинейность (этап 420), для стабильной криволинейности подбирают криволинейности из другого источника (этап 430). Другим источником может быть другая реконструкция формы в другое время. В качестве альтернативы, другим источником могут быть данные допроцедурной или внутрипроцедурной визуализации, например реконструкции анатомического объема из компьютерного томографа. В другом варианте осуществления другим источником может быть другое измеряющее форму волокно, подчиняющееся таким же ограничениям формы, как первое измеряющее форму волокно.
Криволинейности подбирают сравнением радиусов изгиба из разных криволинейностей разных кривых, как показано на фиг. 6. Радиус изгиба кривой 500 (сохраненной в памяти с этапа 420), заданной точками 501, 502, 503, подгоняют к радиусу изгиба кривой 600 (из другого источника), заданной точками 610, 602, 603. Если радиусы изгибов совпадают в пределах предварительно заданного допуска на погрешность, то криволинейности определяются как подобранные. Поскольку точки расположены на дискретных расстояниях, то кривая новой формы может быть сдвинута между положениями опорной формы. В соответствии с различными вариантами осуществления можно применить очень мелкую частоту отсчетов или можно выполнять интерполяцию кривыми или сплайнами Эрмита для совершенствования обнаружения.
Программа 134 совмещения согласует подобранные криволинейности (этап 440). Для приведения трехмерной криволинейности из другого источника с подобранным радиусом кривизны в положение согласования с трехмерной криволинейностью записанной в памяти стабильной криволинейностью вычисляют перенос и поворот. Перенос и поворот, необходимые для согласования, можно выразить в форме матрицы преобразования, которую можно применить к реконструкции формы, чтобы согласовать ее с данными визуализации. Матрицу можно вычислить по координатам точек на подобранных криволинейностях.
В соответствии с одним вариантом осуществления, программа 134 совмещения согласует криволинейности путем взятия трех точек (точки изгиба, проксимальной точки и дистальной точки) от каждой криволинейности для формирования треугольников, которые лежат в плоскостях соответствующих изгибов, и затем согласования треугольников.
В соответствии с одним вариантом осуществления, программа 134 совмещения отображает реконструкцию формы для новой совмещенной криволинейности на допроцедурной или внутрипроцедурной реконструкции изображения, соответствующей совмещению (этап 450).
Изобретение может принимать форму полностью аппаратного варианта осуществления или варианта осуществления, содержащего как аппаратное, так и программное обеспечение. В примерном варианте осуществления изобретение реализовано в форме программного обеспечения, которое включает в себя, но без ограничения, аппаратно реализованное программное обеспечение, резидентное программное обеспечения, микрокод и т.п.
Кроме того, изобретение может принимать форму компьютерного программного продукта, вызываемого из используемого компьютером или машиночитаемого запоминающего устройства, обеспечивающего программный код для использования непосредственно или в связи с компьютером или любой(ым) системой или устройством для выполнения команд. В целях настоящего описания, используемое компьютером или машиночитаемое запоминающее устройство может быть любым устройством, которое может содержать или хранить программу для использования непосредственно или в связи с системой или устройством для выполнения команд.
Вышеописанный способ может быть реализован машиночитаемым запоминающим устройством, содержащим программный продукт, содержащий машиноисполняемую программную команду, кодированную в упомянутом устройстве на постоянном машиночитаемом носителе, которая, при выполнении машиной, например компьютером, выполняет этапы способа. Упомянутый программный продукт может храниться в любом из множества различных известных машиночитаемых запоминающих устройств, включая, но без ограничения, компакт-диски, гибкие диски, устройства памяти USB и т.п.
Запоминающее устройство может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или устройством). Примеры машиночитаемого запоминающего устройства включают в себя полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативную память (RAM), постоянную память (ROM), жесткий магнитный диск и оптический диск. Современные примеры оптических дисков включают в себя постоянную память на компакт-диске (CD-ROM), компакт-диск для чтения/записи (CD-R/W) и универсальный цифровой видеодиск (DVD).
Вышеприведенное описание и прилагаемые чертежи предназначены только для пояснения и не для ограничения изобретения. Предполагается, что объем изобретения должен охватывать эквивалентные варианты и конфигурации в полном объеме нижеследующей формулы изобретения.
После изучения чертежей, раскрытия и прилагаемой формулы изобретения специалистами в данной области техники в процессе практической реализации заявленного изобретения могут быть разработаны и выполнены другие варианты раскрытых вариантов осуществления. В формуле изобретения, формулировка «содержащий» не исключает других элементов или этапов, и форма единственного числа не исключает форму множественного числа. Единственный процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Очевидное обстоятельство, что некоторые признаки упомянуты во взаимно различающихся пунктах формулы изобретения, не означает невозможность применения комбинации упомянутых признаков в подходящем случае. Никакие позиции в формуле изобретения нельзя считать ограничивающими объем изобретения.
Система и способ генерации отчета на основании входных данных от радиолога
Лоткообразная накладка, которая имеет боковые стабилизаторы
Механизм наклона с прямым приводом для медицинских устройств для ухода за детьми раннего возраста
Устройство для направления гибкого шнура, выходящего из устройства для ухода за одеждой
Устройство и способ для преобразования динамического диапазона изображений
Насос с пружинным приводом для выдачи отдельных выбросов жидкости
Ультразвуковая система и способ измерения с использованием сдвиговой волны
Длинные жесткие спейсеры для улучшения кинетики связывания в иммуноанализах
Датчик силы, обеспечивающий непрерывную обратную связь для приводимой в действие посредством резонанса зубной щетки с использованием датчика холла
Устройство сопряжения с пациентом
Система и способ генерации отчета на основании входных данных от радиолога
Лоткообразная накладка, которая имеет боковые стабилизаторы
Механизм наклона с прямым приводом для медицинских устройств для ухода за детьми раннего возраста
Устройство для направления гибкого шнура, выходящего из устройства для ухода за одеждой
Устройство и способ для преобразования динамического диапазона изображений
Насос с пружинным приводом для выдачи отдельных выбросов жидкости
Ультразвуковая система и способ измерения с использованием сдвиговой волны
Длинные жесткие спейсеры для улучшения кинетики связывания в иммуноанализах
Датчик силы, обеспечивающий непрерывную обратную связь для приводимой в действие посредством резонанса зубной щетки с использованием датчика холла
Устройство сопряжения с пациентом

