Результат интеллектуальной деятельности: Ультразвуковая система обнаружения препятствий движению подвижного объекта
Вид РИД
Изобретение
Изобретение относится к ультразвуковым системам обнаружения препятствий, предназначенным для регистрации и обработки сигналов, получаемых с акустических датчиков, и может быть использовано в подвижных дистанционно-управляемых объектах военного или двойного назначения для определения расстояний до препятствий.
Известна система управления (см. патент RU №2386507, B21D 5/02, B23Q 15/22, F16P 3/00, 20.04.2010 г.), принятая за прототип. Система управления содержит средства обнаружения объектов, расположенных на траектории движения или рядом с ней, и средства обработки данных и управления, выполненные с возможностью определения расстояния. Средства обнаружения объектов на траектории движения содержат светоизлучающие средства, выполненные с возможностью освещения области около указанной траектории, и светоприемные средства, выполненные с возможностью приема света, прошедшего через указанную область, так что находящиеся в ней объекты отбрасывают тени на светоприемные средства, которые находятся во взаимодействии со средствами обработки данных и управления, так что они определяют наличие препятствий в упомянутой области на основе изображений, полученных указанными светоприемными средствами. Средства обработки данных и управления содержат средства запоминания, которые выполнены с возможностью хранения изображений, полученных светоприемными средствами, в качестве известных изображений.
Недостатками прототипа являются:
- недостаточная точность констатации конфигуративной сложности обнаруженного объекта;
- необходимость проведения большого объема регулировочных работ при настройке системы;
- невозможность обеспечить четкое обнаружение объектов при наличии атмосферных осадков;
- невозможность обеспечить обнаружение объектов различной структуры (твердых, жидких, зернообразных и порошкообразных), прозрачности и цвета.
Предлагаемым изобретением решается задача по повышению степени автономности дистанционно-управляемых подвижных объектов и безопасности во время движения при выполнении задач по назначению.
Технический результат, получаемый при осуществлении изобретения, заключается в создании ультразвуковой системы обнаружения препятствий движению подвижного объекта, устанавливаемой на самодвижущейся платформе дистанционно-управляемого объекта и обладающей способностью определять расстояние до препятствия с высокой точностью, обеспечивать работу в режиме локатора с возможностью измерения как очень малых, так и больших расстояний.
Указанный технический результат достигается тем, что в предлагаемой ультразвуковой системе обнаружения препятствий движению подвижного объекта, содержащей имеющие излучающие и приемные приборы средства обнаружения объектов, которые находятся во взаимодействии со средствами обработки данных и управления таким образом, что они определяют наличие препятствий, новым является то, что излучающие и приемные приборы средств обнаружения объектов выполнены в виде n приемо-передающих преобразователей, располагающихся по периметру подвижного объекта, приемо-передающие преобразователи выполнены с возможностью поочередного излучения зондирующих ультразвуковых импульсов, сканирующих поверхность идентифицируемого объекта, а после отражения от нее - их параллельного во времени приема и регистрации впоследствии в блоке обработке данных, блок обработки данных состоит из независимых каналов оцифровки аналоговых сигналов приемо-передающих преобразователей, содержащих предварительные широкополосные операционные усилители, выполненные с возможностью обеспечения высокой величины входного сопротивления каналов, усилители для согласования по уровню сигналов предварительных усилителей и аналого-цифровых преобразователей и аналого-цифровые преобразователи, обеспечивающие оцифровку аналоговых сигналов, устройства дальнейшей реализации алгоритма цифровой обработки и регистрации сигналов, выполненного на базе программируемой логической интегральной схемы, генератора тактовой частоты, импульсного преобразователя напряжения, преобразователя интерфейса USB 2.0 для передачи результатов измерений, транзисторных ключей, предназначенных для реализации цифрового управления приемо-передающими преобразователями по сигналам, поступающим с программируемой логической интегральной схемы.
Выполнение излучающих и приемных приборов средств обнаружения объектов в виде n приемо-передающих преобразователей, располагающихся по периметру подвижного объекта, позволяет:
- получить полную информацию о размещении препятствий вокруг дистанционно-управляемого подвижного объекта;
- исключить возникновение «мертвых» зон во время сканирования местности при движении.
Выполнение приемо-передающих преобразователей с возможностью поочередного излучения зондирующих ультразвуковых импульсов, сканирующих поверхность идентифицируемого объекта, а после отражения от нее - их параллельного во времени приема и регистрации в блоке обработке данных, позволяет:
- зафиксировать наиболее полную картину конфигуративной сложности обнаруженного объекта;
- подготовить формирование цифровых массивов данных для получения полной картины о форме и размерах возникшего препятствия;
- получить устойчивый поток «полезной» информации при различных метеорологических условиях.
Наличие в блоке обработки данных независимых каналов оцифровки аналоговых сигналов приемо-передающих преобразователей позволяет:
- регистрировать получаемые от приемо-передающих преобразователей аналоговые сигналы;
- обеспечить необходимую величину входного сопротивления каналов блока;
- обеспечить согласование по уровню сигналов входных усилителей и аналого-цифровых преобразователей;
- обеспечить первичную оцифровку аналоговых сигналов.
Включение в состав блока обработки данных программируемой логической интегральной схемы позволяет обеспечить регистрацию и дальнейшую цифровую обработку.
Включение в состав блока обработки даны преобразователя интерфейса USB 2.0 позволяет обеспечить передачу результатов измерений.
Включение в состав блока обработки данных транзисторных ключей позволяет обеспечить реализацию цифрового управления приемо-передающими преобразователями по сигналам, поступающим с программируемой логической интегральной схемы.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
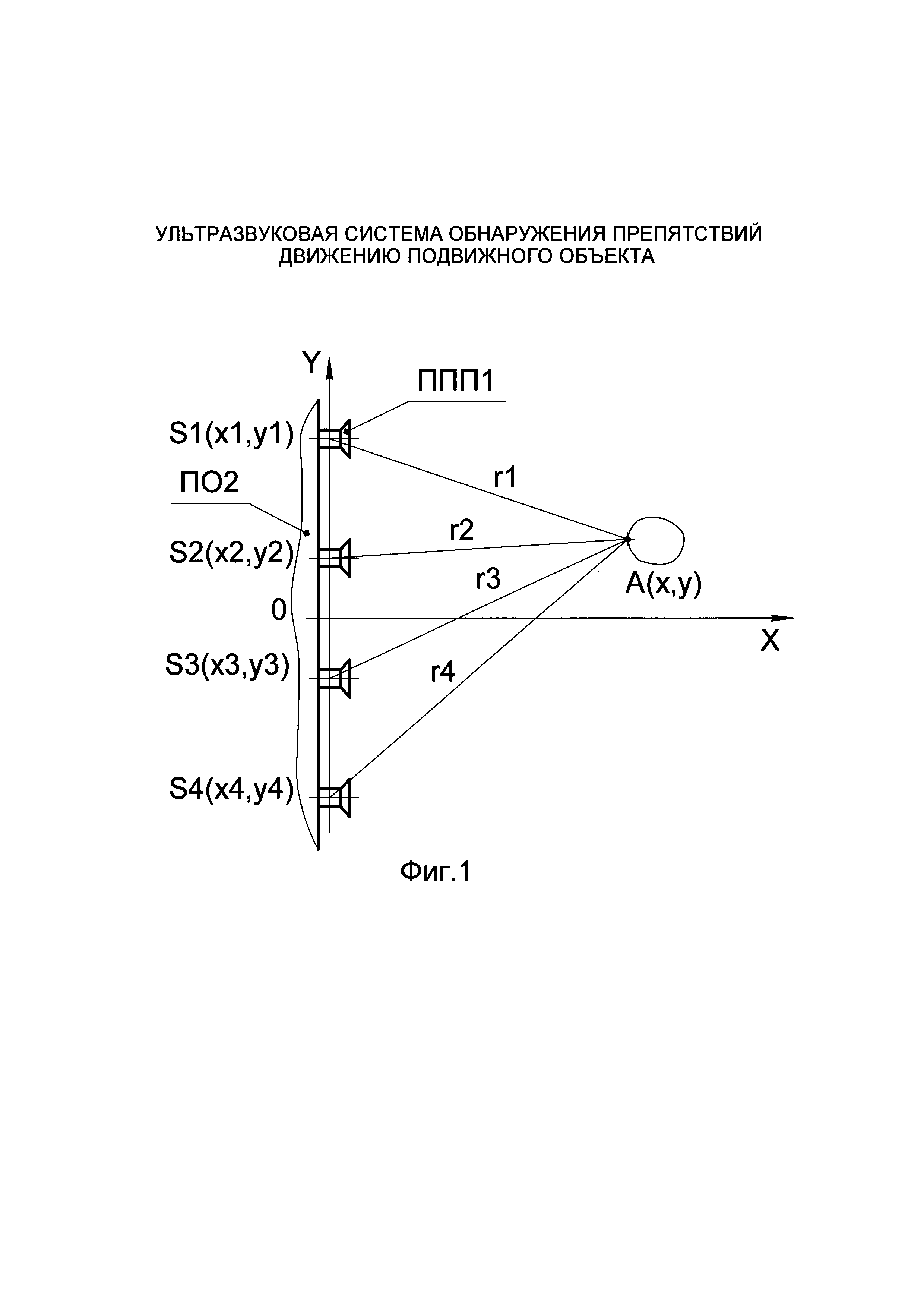
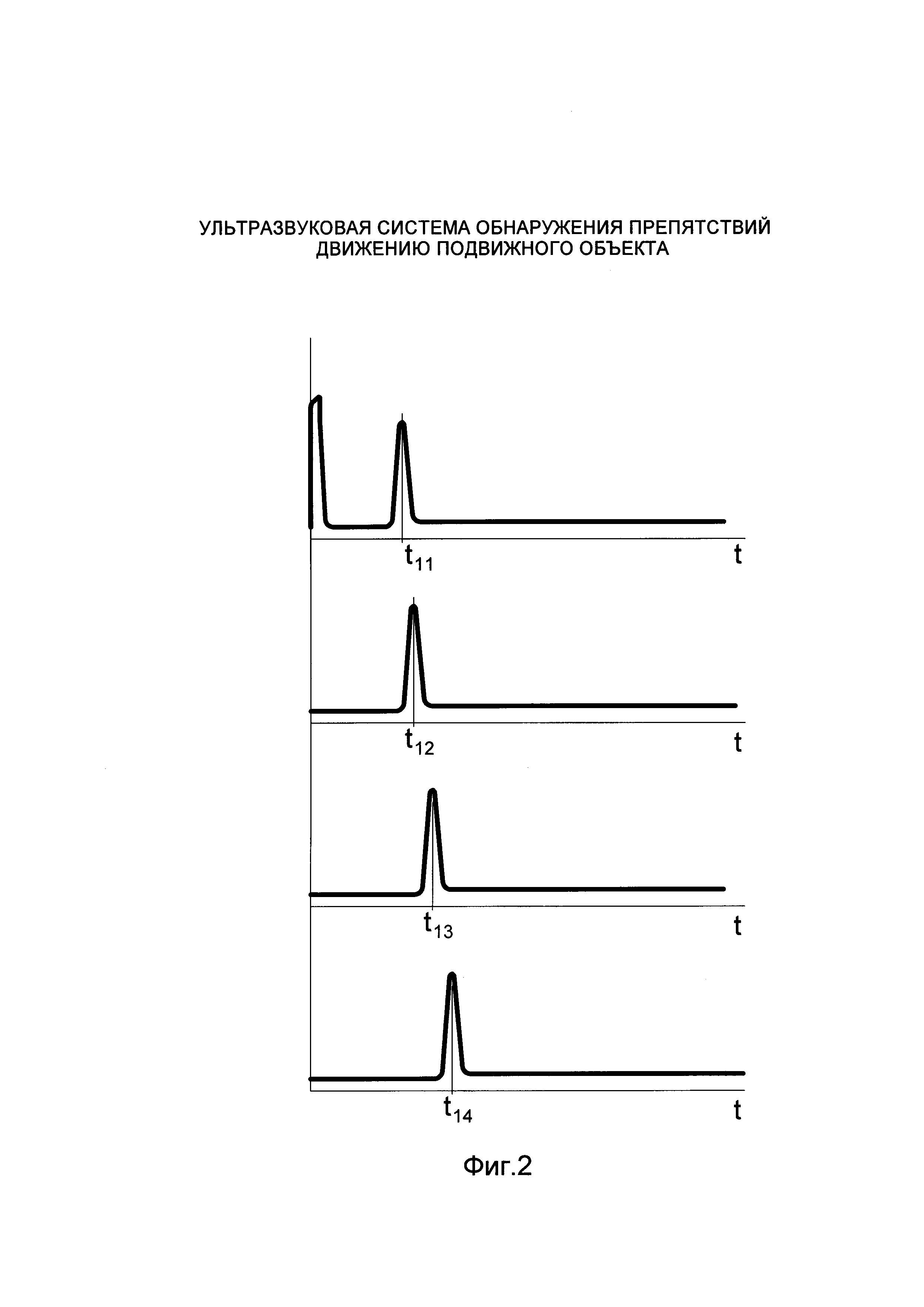
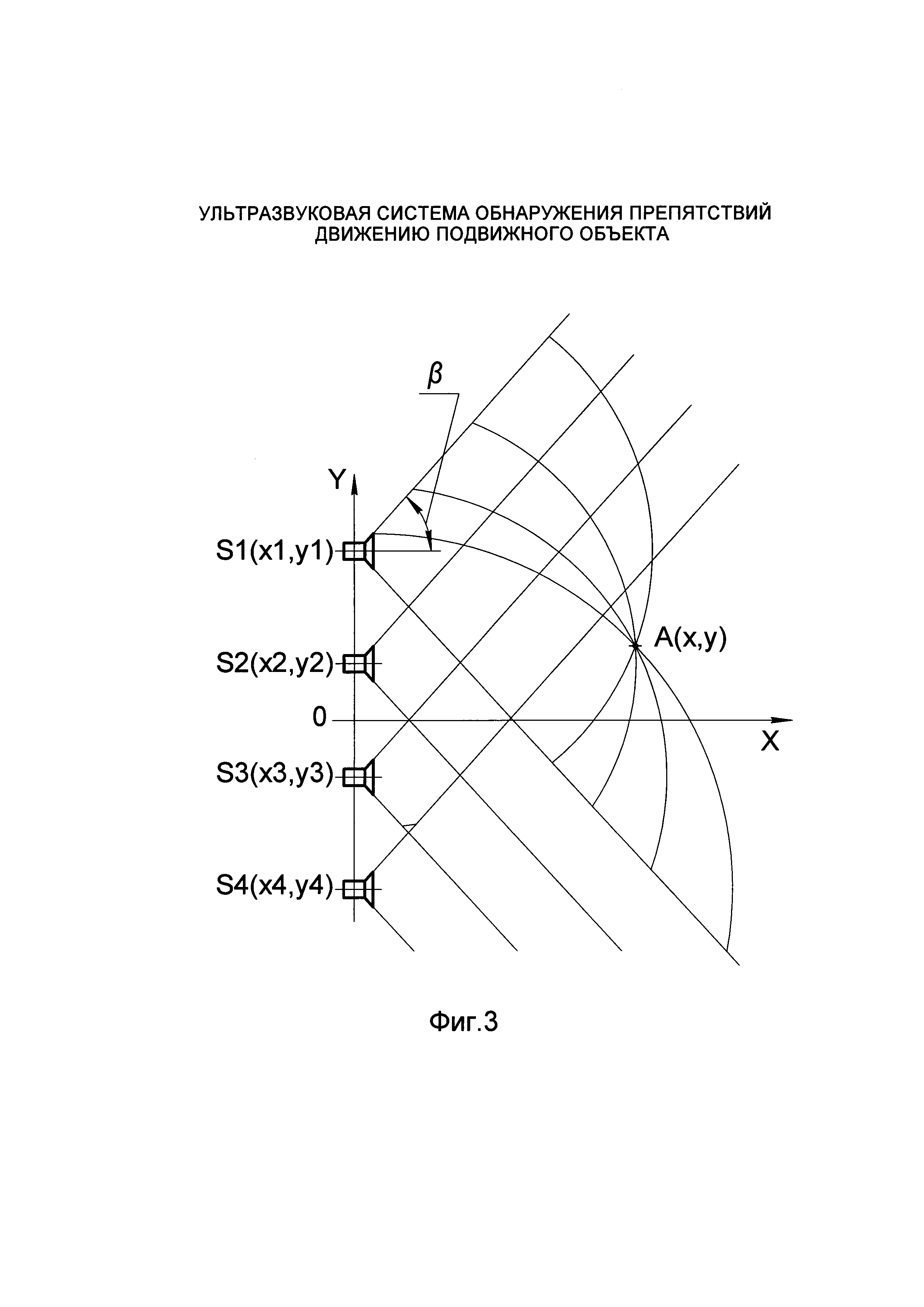
Сущность изобретения поясняется чертежами, где на фиг. 1 показан пример схемы расположения приемо-передатчиков S1…S4 относительно отражающей поверхности идентифицируемого объекта; на фиг. 2 - пример графиков регистрируемых сигналов; на фиг. 3 - пример схемы определения положения подвижного объекта; на фиг. 4 - пример схемы перекрытия диаграмм направленности; на фиг. 5 - функциональная схема блока обработки данных.
Ультразвуковая система обнаружения препятствий движению подвижного объекта содержит излучающие и приемные приборы средств обнаружения объектов, выполненые в виде n приемопередающих преобразователей (ППП) 1, располагающихся по периметру подвижного объекта (ПО) 2, блок обработки данных состоит из независимых каналов оцифровки (НКО) 3 аналоговых сигналов ППП 1, содержащих предварительные широкополосные операционные усилители (ШОУ) 4, усилители (У) 5 для согласования по уровню сигналов предварительных усилителей и аналого-цифровых преобразователей и аналого-цифровые преобразователи (АЦП) 6, обеспечивающие оцифровку аналоговых сигналов, устройства дальнейшей реализации алгоритма цифровой обработки и регистрации сигналов, выполненного на базе программируемой логической интегральной схемы (ПЛИС) 7, генератора тактовой частоты (ГТЧ) 8, импульсного преобразователя напряжения (ИПН) 9, преобразователя интерфейса USB 2.0 (ПИ) 10 для передачи результатов измерений, транзисторных ключей (К) 11, предназначенных для реализации цифрового управления ППП 1 по сигналам, поступающим с ПЛИС 7.
Ультразвуковая система обнаружения препятствий движению подвижного объекта функционирует следующим образом. Работа системы заключается в поочередном излучении n ППП 1 ультразвуковых сканирующих импульсов с последующей регистрацией и обработкой эхо-сигналов, получаемых с объекта обнаружения. Рассмотрим работу системы на примере, когда n=4. В момент времени t=0 i-м ППП 1 излучается зондирующий ультразвуковой импульс длительностью τ. Пройдя расстояние ri импульс достигает точки на поверхности идентифицируемого объекта, и, отразившись от нее, проходит расстояние rj до j-ого приемо-передатчика. При этом зондирующий импульс проходит путь:

где (x, y) - координаты идентифицируемого объекта A;
(xi, yi) - координаты i-ого приемопередатчика;
(xj, yj) - координаты j-ого приемопередатчика.
Распространяясь, в пространстве зондирующий импульс приобретает задержку:

где c - скорость звука в среде.
Сигналы ППП 1 регистрируются параллельно во времени - оцифровываются и записываются в цифровые массивы данных с частотой fАЦП.
Расстояние, проходимое зондирующим импульсом, определяется по его временной задержке, исходя из (2):

Пройденному lij расстоянию соответствует объект, местоположение которого определяется эллипсом, ограниченным перекрытием диаграмм направленности соответствующих ППП 1.
Определение положения объекта по величинам l11, l12, l13, l14 рассмотрим на примере. Фокусы эллипса соответствуют точкам расположения i-ого излучателя и j-ого приемника с большей полуосью, определяемыми выражениями:

Местоположение объекта и его контуры определяются по пресечению двух и более эллипсов. Общее (максимальное) число эллипсов определяется квадратом числа ППП 1 n2, из них независимых 1/2(n2+n).
Для системы из четырех ППП 1 n=4:
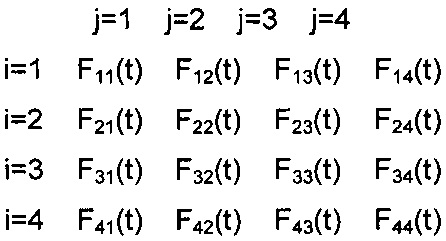
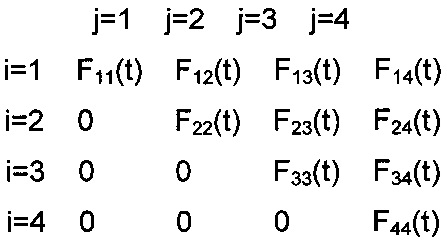
В силу тождественности сигналов Fij(t)=Fji(t):

Для построения ультразвукового изображения объекта достаточно анализа лишь независимых сигналов 1/2(n2+n)=10:
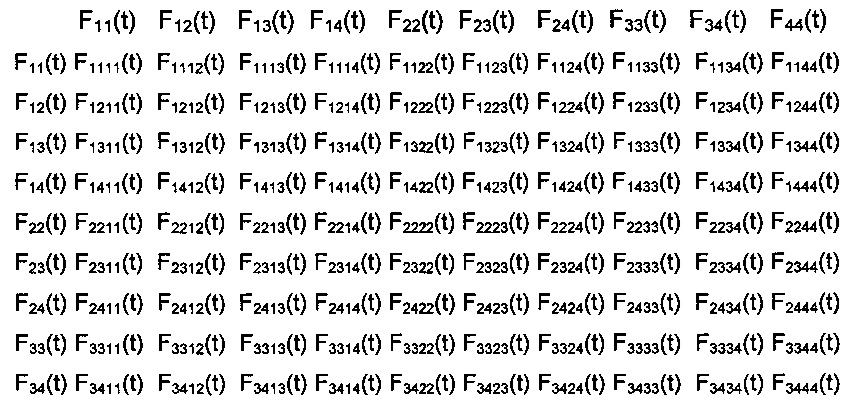
При этом число пересечений всех независимых сигналов 1/4(n2+n)2=100:

В силу тождественности сигналов Fijkl(t)=Fklji(t) и вырожденности Fijij(t) число пересечений уменьшается до n/8(n3+2n2-n-2)+45:
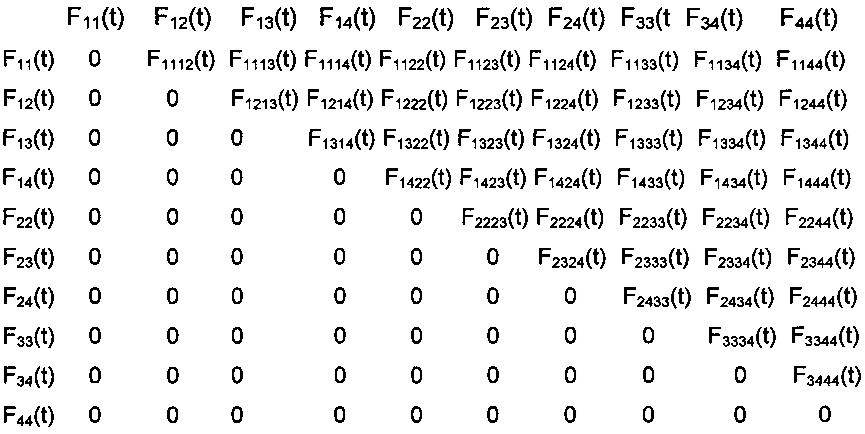
Для получения ультразвуковой картинки производится суммирование независимых пересечений.
Пример подобной картинки приведен на фиг. 4, при этом изображение получается лишь в зоне перекрытия диаграмм направленности ППП 1: S1*S2, S2*S3, S3*S4, S1*S2*S3, S2*S3*S4, S1*S2*S3*S4.
В данном примере отраженные от объекта идентификации сигналы ППП 1 поступают по четырем НКО 3 в ПЛИС 7, реализующие алгоритмы цифровой обработки аналоговых сигналов. Цифровое управление ППП 1 осуществляется транзисторными ключами К 11, сигналы управления поступают с ПЛИС 7. В состав каждого НКО 3 входят:
- предварительные ШОУ 4, обеспечивающие высокие величины входного сопротивления каналов;
- усилители У 5, которые обеспечивают согласование по уровню сигналов ШОУ 4 и АЦП 6;
- 12-ти разрядные АЦП 6, обеспечивающие оцифровку аналоговых сигналов с частотой дискретизации f=2,5 МГц.
Оцифрованные сигналы поступают в ПЛИС 7 для регистрации и дальнейшей цифровой обработки. Для передачи результатов измерений служит ПИ 10 USB-2.0.
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в создании ультразвуковой системы обнаружения препятствий движению подвижного объекта, устанавливаемой на самодвижущейся платформе дистанционно-управляемого объекта и обладающей способностью определять расстояние до препятствия с высокой точностью, обеспечивать работу в режиме локатора с возможностью измерения как очень малых, так и больших расстояний.
Ультразвуковая система обнаружения препятствий движению подвижного объекта, содержащая имеющие излучающие и приемные приборы средства обнаружения объектов, которые находятся во взаимодействии со средствами обработки данных и управления таким образом, что они определяют наличие препятствий, отличающаяся тем, что излучающие и приемные приборы средств обнаружения объектов выполнены в виде n приемо-передающих преобразователей, располагающихся по периметру подвижного объекта, приемо-передающие преобразователи выполнены с возможностью поочередного излучения зондирующих ультразвуковых импульсов, сканирующих поверхность идентифицируемого объекта, а после отражения от нее - их параллельного во времени приема и регистрации впоследствии в блоке обработке данных, блок обработки данных состоит из независимых каналов оцифровки аналоговых сигналов приемо-передающих преобразователей, содержащих предварительные широкополосные операционные усилители, выполненные с возможностью обеспечения высокой величины входного сопротивления каналов, усилители для согласования по уровню сигналов предварительных усилителей и аналого-цифровых преобразователей и аналого-цифровые преобразователи, обеспечивающие оцифровку аналоговых сигналов, устройства дальнейшей реализации алгоритма цифровой обработки и регистрации сигналов, выполненного на базе программируемой логической интегральной схемы, генератора тактовой частоты, импульсного преобразователя напряжения, преобразователя интерфейса USB 2.0 для передачи результатов измерений, транзисторных ключей, предназначенных для реализации цифрового управления приемо-передающими преобразователями по сигналам, поступающим с программируемой логической интегральной схемы.
Способ термообработки пенька ствола автоматического стрелкового оружия
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет
Способ термообработки пенька ствола автоматического стрелкового оружия
Способ стабилизации гальванического хромового покрытия стволов автоматического стрелкового оружия и шахтная печь сопротивления для его реализации
Способ формирования режима работы с цифровыми картами местности
Способ контроля функционирования топопривязчика
Программно-аппаратный комплекс
Кулачковый механизм с кинематическим замыканием и способ местной закалки роликового паза кулачка
Способ определения угла поворота мобильного робототехнического комплекса при преодолении препятствий
Механизм образования пакета для брикета правильной геометрической формы
Поворотная пусковая установка
Пулемет

