Результат интеллектуальной деятельности: СПОСОБ ОТКАЗОУСТОЙЧИВОГО УПРАВЛЕНИЯ ДАТЧИКОМ ПОЛОЖЕНИЯ ВЕНТИЛЬНОГО РЕАКТИВНОГО ЭЛЕКТРОДВИГАТЕЛЯ
Вид РИД
Изобретение
Область техники
Настоящее изобретение относится к способу отказоустойчивого управления датчиком положения вентильного реактивного электродвигателя, в особенности подходящего для отказоустойчивого управления датчиком положения в многофазных, роторных или линейных вентильных реактивных электродвигателях, реализованных во множестве геометрий.
Уровень техники
Датчики положения, которые обеспечивают базис сигналов положения ротора для расчета скорости вращения и изменения фазы двигателя в системах вентильного реактивного электродвигателя, могут отказывать из-за ряда причин, таких как пыль и столкновения и т.д., что приводит к потере фронта импульсов, сбою при изменении фазы двигателя и сбою нормальной эксплуатации. Поэтому очень важно восстанавливать выходные сигналы датчиков положения в системе вентильного реактивного электродвигателя и осуществлять отказоустойчивое управление датчиками положения. Известные способы отказоустойчивого управления для восстановления выходных сигналов датчиков положения не учитывали условий изменяющейся скорости или изменяющегося ускорения/замедления вентильных реактивных электродвигателей. Поэтому восстановленные выходные сигналы датчиков положения имеют большое отклонение в условиях изменяющейся скорости или изменяющегося ускорения/замедления электродвигателей, отражающееся на эффекте отказоустойчивого управления.
Раскрытие сущности изобретения
Техническая проблема
Для того чтобы преодолеть указанные недостатки уровня техники, настоящее изобретение предоставляет способ отказоустойчивого управления датчиком положения вентильного реактивного электродвигателя, который является простым, имеет высокую отказоустойчивую способность и высокую надежность, и может достичь хорошего эффекта.
Техническое решение
Способ отказоустойчивого управления датчиком положения вентильного реактивного электродвигателя, предоставляемого настоящим изобретением, состоит в следующем.
Когда датчики положения в вентильном реактивном электродвигателе работают без сбоев, в выходном сигнале датчиков положения, в режиме реального времени регистрируют четыре последовательных равноотстоящих или обладающих одинаковым наклоном фронта импульса, при этом
четвертый фронт импульса является текущим фронтом импульса, а, в хронологическом порядке,
третий фронт импульса является более ранним, чем четвертый фронт импульса,
второй фронт импульса является более ранним, чем третий фронт импульса,
первый фронт импульса является более ранним, чем второй фронт импульса,
временной интервал между первым фронтом импульса и вторым фронтом импульса обозначен как Т1,
временной интервал между вторым фронтом импульса и третьим фронтом импульса обозначен как Т2,
временной интервал между третьим фронтом импульса и четвертым фронтом импульса обозначен как Т3, а
временной интервал между фронтом импульса, следующим сразу за текущим фронтом импульса, и текущим фронтом импульса обозначен как Т4, который вычисляют по следующим формулам




Если происходит отказ датчика положения вентильного реактивного электродвигателя и потерян фронт импульса, следующий сразу после текущего фронта импульса, то следующий фронт импульса восстанавливается на временном интервале Т4 по истечении времени текущего фронта импульса; таким образом, реализуют отказоустойчивую эксплуатацию датчиков положения в вентильном реактивном электродвигателе.
Положительный эффект:
Способ, предоставляемый в настоящем изобретении, применим для отказоустойчивого управления одним датчиком положения или несколькими датчиками положения в многофазных, роторных или линейных вентильных реактивных электродвигателях, реализованных в различных топологиях, в условиях эксплуатации при постоянной скорости, постоянном ускорении или замедлении, переменном ускорении или замедлении. Когда датчики положения вентильного реактивного электродвигателя работают без сбоев, в выходном сигнале датчиков положения, в режиме реального времени, регистрируют четыре последовательных, равноотстоящих или обладающих одинаковым наклоном, фронта импульса, при этом четвертый фронт импульса является текущим фронтом импульса; интервал времени между каждыми двумя соседними фронтами импульсов определяется последовательно, а интервал времени между фронтом импульса, следующим сразу после текущего фронта импульса, и текущим фронтом импульса рассчитывается в соответствии с временными интервалами. Если происходит отказ датчика положения вентильного реактивного электродвигателя и теряется фронт импульса, следующего сразу после текущего фронта импульса, следующий фронт импульса восстанавливается на этом временном интервале по истечении времени текущего фронта импульса в выходном сигнале датчика положения; таким образом, система вентильного реактивного электродвигателя может осуществлять отказоустойчивую эксплуатацию, даже если происходит отказ датчика положения, и срок службы системы улучшается. В настоящем изобретении восстановленный сигнал положения точен по времени, алгоритм может быть легко реализован, а выходной сигнал отказавшего датчика положения может быть восстановлен посредством выходного сигнала датчика положения, работающего в нормальном режиме. Способ обладает высокой отказоустойчивой способностью и высокой надежностью, дополнительно повышает надежность системы и обладает хорошими перспективами применения.
Описание чертежей
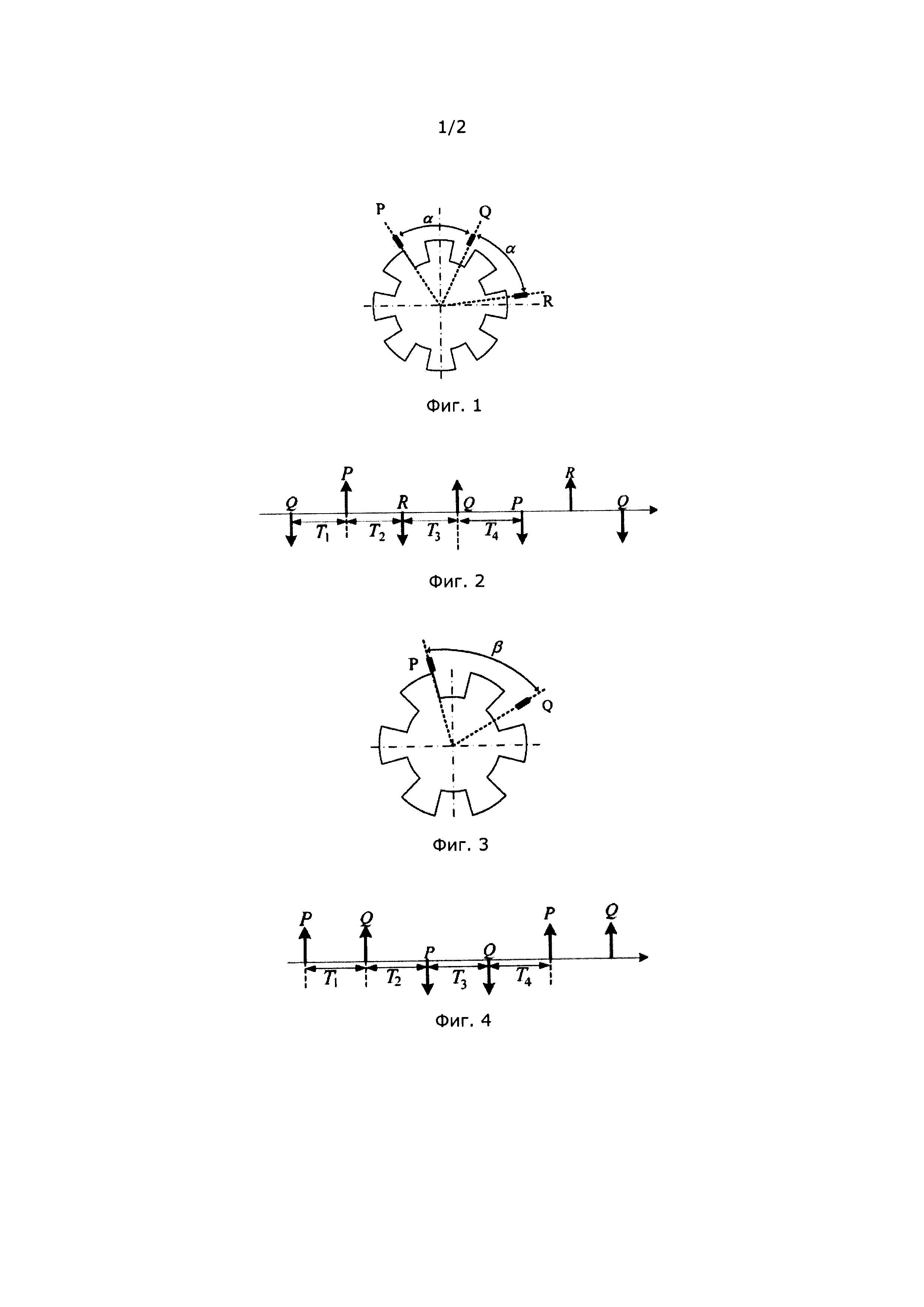
На Фиг. 1 показана схема установки датчиков положения в роторном вентильном реактивном электродвигателе в трехфазной конструкции 12/8.
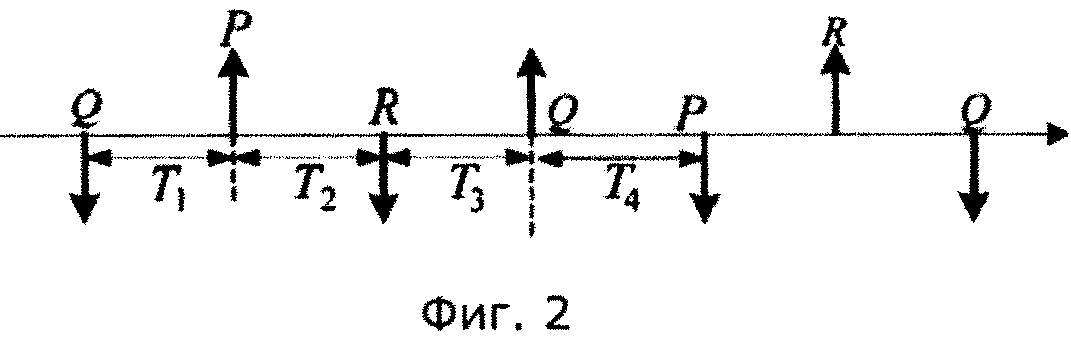
На Фиг. 2 показана схема обнаружения фронтов импульсов в выходных сигналах и восстановление сигнала датчиков положения в роторном вентильном реактивном электродвигателе в трехфазной конструкции 12/8.
На Фиг. 3 показана схема установки датчиков положения в роторном вентильном реактивном электродвигателе в четырехфазной конструкции 8/6.
На Фиг. 4 показана схема обнаружения фронтов импульсов в выходных сигналах и восстановление сигнала датчиков положения в роторном вентильном реактивном электродвигателе в четырехфазной конструкции 8/6.
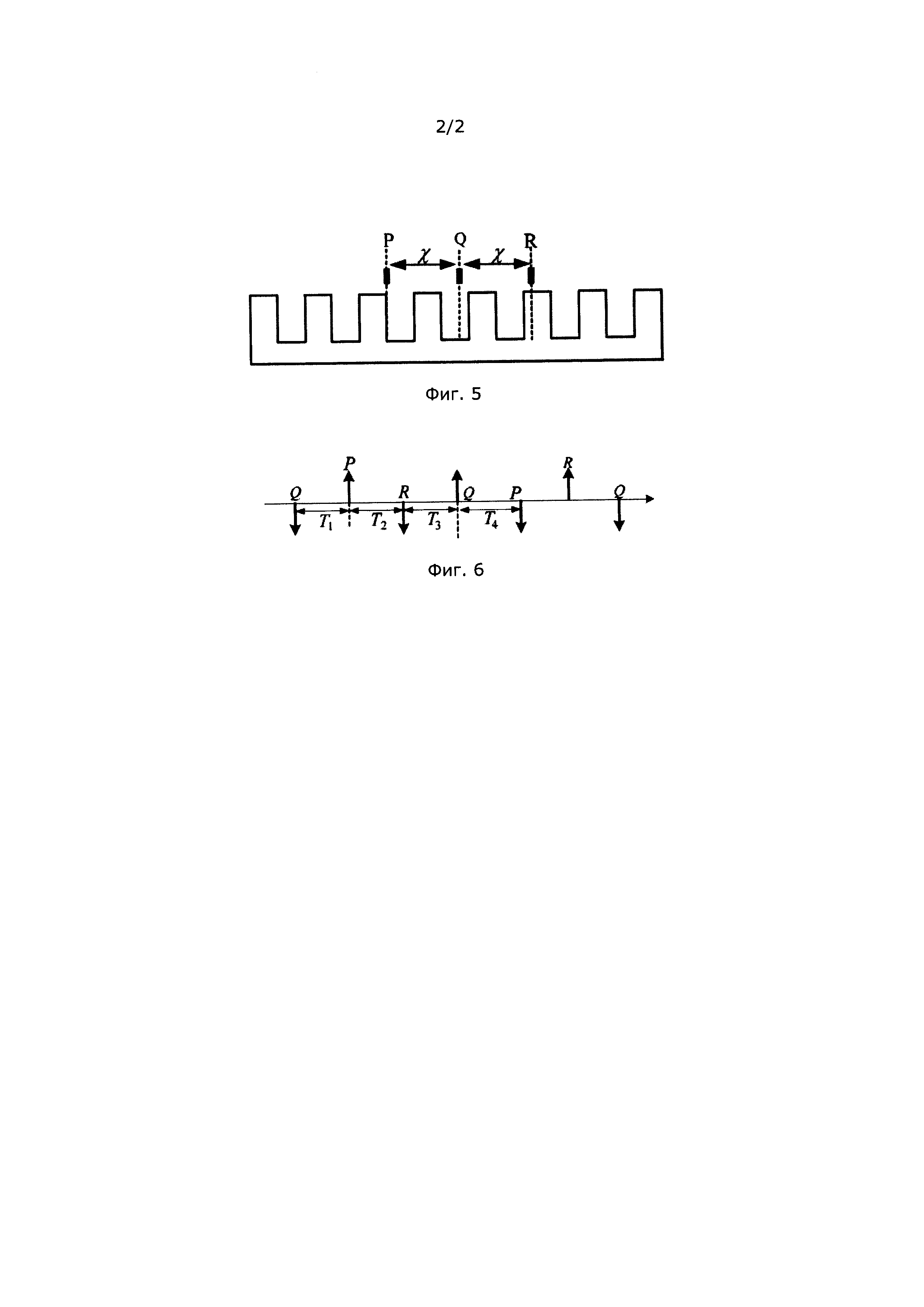
На Фиг. 5 показана схема установки датчиков положения в линейном вентильном реактивном электродвигателе в трехфазной конструкции 6/4.
На Фиг. 6 показана схема обнаружения фронтов импульсов в выходных сигналах и восстановление сигнала датчиков положения в линейном вентильном реактивном электродвигателе в трехфазной конструкции 6/4.
Осуществление изобретения
В соответствии с настоящей заявкой, примеры реализации настоящего изобретения будут далее описаны со ссылками на прилагаемые чертежи.
Пример 1.
Как показано на схеме установки на Фиг. 1, три датчика положения Р, Q и R установлены симметрично в роторном вентильном реактивном электродвигателе в трехфазной конструкции 12/8, α угловой интервал а составляет 60°. Когда датчики положения в вентильном реактивном электродвигателе работают без сбоев, как показано на Фиг. 2, в режиме реального времени на выходах датчиков положения регистрируют четыре последовательных, обладающих одинаковым наклоном, фронта импульса Q, Р, R, Q, при этом
четвертый фронт импульса Q, отсчитанный слева, является текущим фронтом импульса, а, в хронологическом порядке,
третий фронт импульса R является более ранним, чем четвертый фронт импульса Q,
второй фронт импульса Р является более ранним, чем третий фронт импульса R,
первый фронт импульса Q является более ранним, чем второй фронт импульса Р,
временной интервал между первым фронтом импульса Q и вторым фронтом импульса Р обозначен как Т1,
временной интервал между вторым фронтом импульса Р и третьим фронтом импульса R обозначен как Т2,
временной интервал между третьим фронтом импульса R и четвертым фронтом импульса Q обозначен как Т3,
временной интервал Т4 между фронтом импульса Р, следующим сразу за текущим фронтом импульса Q, и текущим фронтом импульса Q рассчитывают по следующим формулам




если происходит отказ датчика положения в вентильном реактивном электродвигателе и потерян фронт импульса Р, следующий сразу после текущего фронта импульса Q, то следующий фронт импульса Р восстанавливают на временном интервале Т4 по истечении времени текущего фронта импульса Q; таким образом, реализуют отказоустойчивую эксплуатацию датчиков положения в роторном вентильном реактивном электродвигателе.
Пример 2.
Как показано на Фиг. 3, два датчика положения Р и Q установлены симметрично в роторном вентильном реактивном электродвигателе в четырехфазной конструкции 8/6, а угловой интервал В составляет 75°. Когда датчики положения в вентильном реактивном электродвигателе работают без сбоев, как это показано на Фиг. 4, в режиме реального времени регистрируют четыре последовательных, обладающих одинаковым наклоном, фронта импульса Р, Q, Р, Q, при этом
четвертый фронт импульса Q, отсчитанный слева, является текущим фронтом импульса, а, в хронологическом порядке,
третий фронт импульса Р является более ранним, чем четвертый фронт импульса Q,
второй фронт импульса Q является более ранним, чем третий фронт импульса Р,
первый фронт импульса Р является более ранним, чем второй фронт импульса Q,
временной интервал между первым фронтом импульса Р и вторым фронтом импульса Q обозначен как Т1,
временной интервал между вторым фронтом импульса Q и третьим фронтом импульса Р обозначен как Т2,
временной интервал между третьим фронтом импульса Р и четвертым фронтом импульса Q обозначен как Т3, а
временной интервал Т4 между фронтом импульса Р, следующим сразу за текущим фронтом импульса Q, и текущим фронтом импульса Q рассчитывают по следующим формулам




если происходит отказ датчика положения в вентильном реактивном электродвигателе и потерян фронт импульса Р, следующий сразу после текущего фронта импульса Q, то следующий фронт импульса Р восстанавливают на временном интервале Т4 по истечении времени текущего фронта импульса Q; таким образом, реализуют отказоустойчивую эксплуатацию датчиков положения в роторном вентильном реактивном электродвигателе.
Пример 3.
Как показано на схеме установки на Фиг. 5, три датчика положения Р, Q, R установлены симметрично в линейном вентильном реактивном электродвигателе в трехфазной конструкции 6/4, с расстоянием х между датчиками, равным 30 мм. Когда датчики положения в вентильном реактивном электродвигателе работают без сбоев, как это показано на Фиг. 6, в режиме реального времени на выходных сигналах датчиков положения регистрируют четыре последовательных равноотстоящих фронта импульса Q, Р, R, Q, при этом
четвертый фронт импульса Q, отсчитанный слева, является текущим фронтом импульса, а, в хронологическом порядке,
третий фронт импульса R является более ранним, чем четвертый фронт импульса Q,
второй фронт импульса Р является более ранним, чем третий фронт импульса R,
первый фронт импульса Q является более ранним, чем второй фронт импульса Р,
временной интервал между первым фронтом импульса Q и вторым фронтом импульса Р обозначен как Т1,
временной интервал между вторым фронтом импульса Р и третьим фронтом импульса R обозначен как Т2,
временной интервал между третьим фронтом импульса R и четвертым фронтом импульса Q обозначен как Т3,
временной интервал Т4 между фронтом импульса Р, следующим сразу за текущим фронтом импульса Q, и текущим фронтом импульса Q рассчитывают по следующим формулам




если происходит отказ датчика положения в вентильном реактивном электродвигателе и потерян фронт импульса Р, следующий сразу после текущего фронта импульса Q, то следующий фронт импульса Р восстанавливают на временном интервале Т4 по истечении времени текущего фронта импульса Q; таким образом, реализуют отказоустойчивую эксплуатацию датчиков положения в линейном вентильном реактивном электродвигателе.
Способ, предоставляемый настоящим изобретением, применим для отказоустойчивого управления одним датчиком положения или множеством датчиков положения в вентильных реактивных электродвигателях с тремя датчиками положения в трехфазной конструкции 6/4 или трехфазной конструкции 24/16, вентильных реактивных электродвигателях с четырьмя датчиками положения в четырехфазной конструкции 8/6 или четырехфазной конструкции 16/12, вентильных реактивных электродвигателях с двумя датчиками положения в четырехфазной конструкции 8/6 или четырехфазной конструкции 16/12, роторных или линейных вентильных реактивных электродвигателях и т.д.




Поворотно-выдвижная гидравлическая крепь
Многоцилиндровая синхронная энергоэффективная высокопроизводительная гидравлическая подъемная система и способ ее работы
Аппарат и метод для автоматического выравнивания корпуса конвейера на скреперном конвейере полностью механизированного угледобывающего забоя
Бурильная штанга с противодействием блокированию для анкерного крепления подошвы выработки угольной шахты
Устройство и способ сбора энергии для клети с направляющими тросами
Цельностальное, двухпластинчатое, самовозвратное, устойчивое к продольному изгибу распорное устройство и способ его изготовления
Устройство мониторинга и амортизации ударного воздействия падающего угля и способ для системы ленточного транспортера в угольной шахте
Система и способ обнаружения разрушения гантельного замка скребкового конвейера
Система и способ распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос
Индексы структурного различия верхних зон заполнения ордовикского известняка и способ их определения
Способ и устройство для установки подключаемого модуля интеллектуального устройства
Способ получения тимосапонина вii
Устройство для периодического контроля жесткой направляющей для клети
Способы и системы для обработки изображений
Фенилатное производное, получение и фармацевтическая композиция и применение
Фенилатное производное, получение и фармацевтическая композиция и применение
Фенилатное производное, получение и фармацевтическая композиция и применение

