Результат интеллектуальной деятельности: СПОСОБ ОПТИМИЗАЦИИ ЭФФЕКТИВНОСТИ БУРЕНИЯ С УМЕНЬШЕНИЕМ СКАЧКООБРАЗНОЙ ПОДАЧИ
Вид РИД
Изобретение
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в целом относится к подземным операциям бурения, а, в частности, к стабилизации бурового долота, бурильной колонны и/или скважинных приборов от боковой вибрации и скачкообразной подачи.
Углеводороды, такие как нефть и газ, как правило, получают из подземных пластов, которые могут быть расположены на суше или в море. Развитие подземных операций и процессов, участвующих в удалении углеводородов из подземной формации, являются сложными. Обычно, подземные операции содержат несколько различных этапов, таких как, например, бурение скважины на требуемой буровой площадке, обработка скважины для оптимизации добычи углеводородов и осуществление необходимых этапов для добычи и обработки углеводородов из поземной формации.
Подземные буровые компоновки, такие как буровые долота, бурильные колонны, забойное оборудование («BHA») и/или скважинные приборы, могут контактировать со стенкой ствола скважины таким образом, чтобы приводить к их захватыванию или застреванию в стенке ствола скважины, приводя к «застреванию» бурильной колонны. При «застреваниях» буровой компоновки поворотное движение бурильной колонны останавливается или существенно уменьшается. Приложение крутящего момента к бурильной колонне с поверхности продолжается, несмотря на застревание буровой компоновки, что приводит к скручиванию бурильной колонны. После преодоления крутящим моментом, прикладываемым к бурильной колонне, силы статического трения на буровую компоновку, бурильная колонна «выскальзывает» или освобождается от стенки ствола скважины. Это явление приводит к проблемам по нескольким причинам, включая возможное уменьшение срока эксплуатации скважинных компонентов, уменьшение качества ствола скважины и задержкам при бурении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые конкретные приведенные в качестве примера варианты реализации настоящего изобретения будут понятны частично со ссылкой на следующее описание и сопроводительные чертежи.
На фиг. 1 изображена приведенная в качестве примера система бурения в соответствии с аспектами настоящего изобретения.
На фиг. 2 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему управления крутящим моментом верхнего привода в соответствии с аспектами настоящего изобретения.
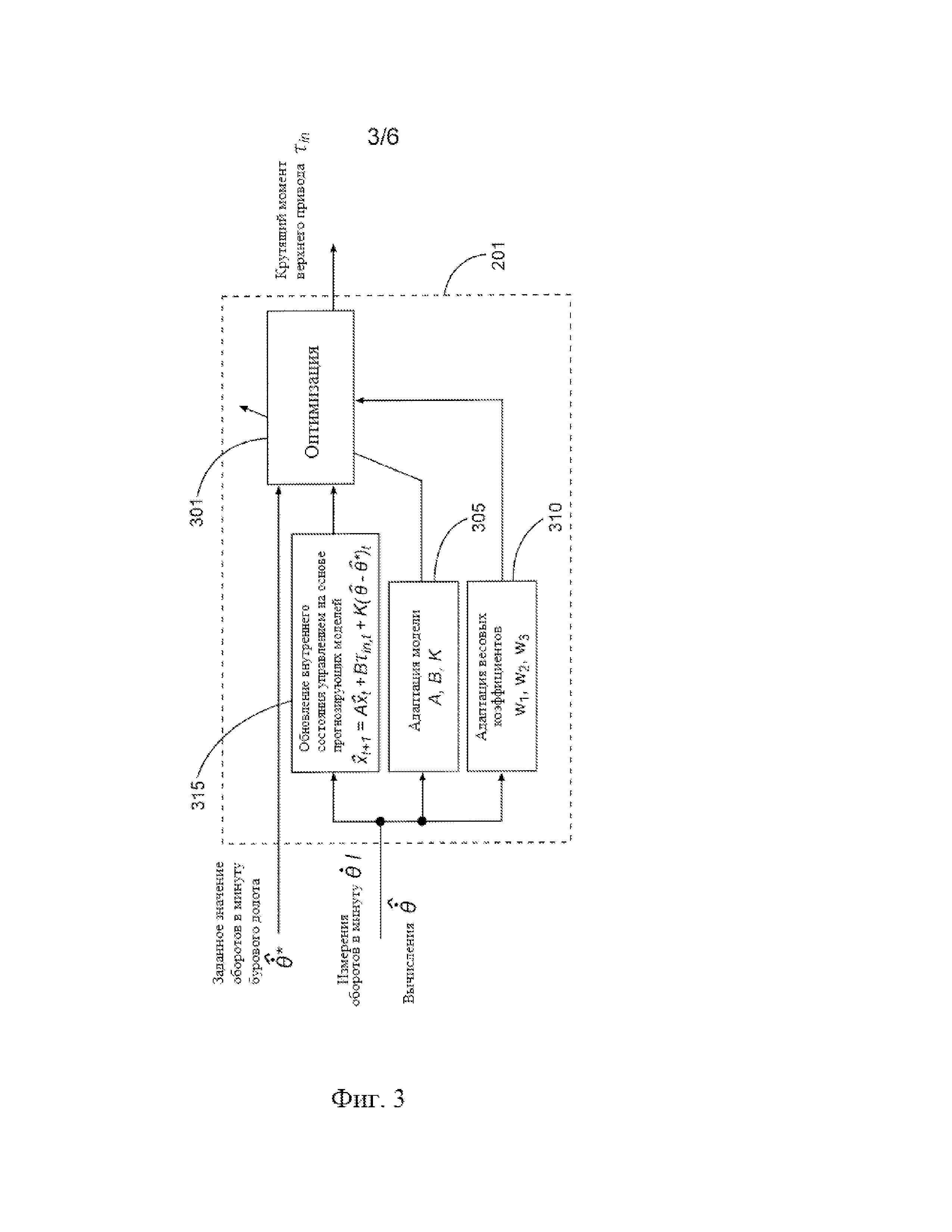
На фиг. 3 представлена диаграмма, иллюстрирующая приведенный в качестве примера упреждающий контроллер, содержащий модель, в соответствии с аспектами настоящего изобретения.
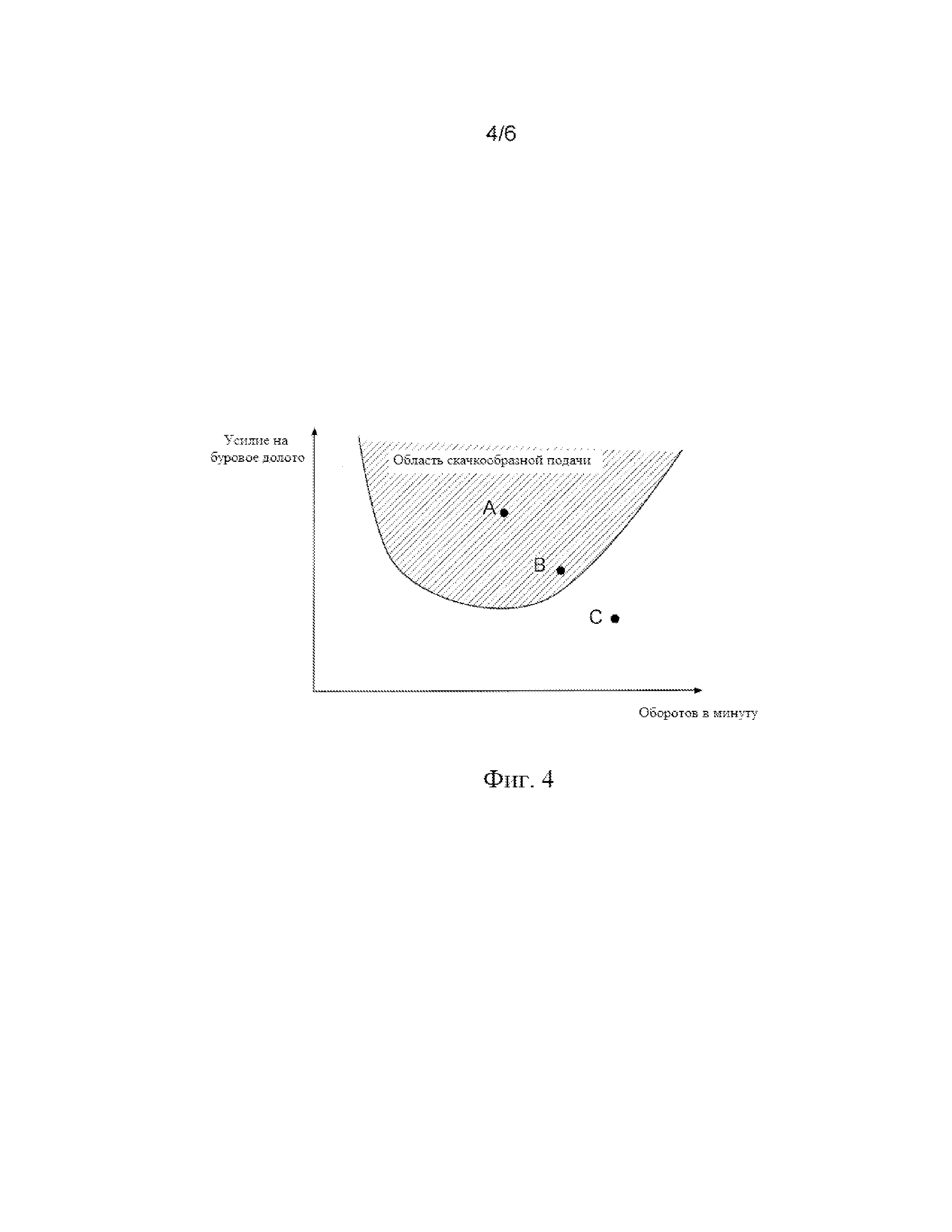
На фиг. 4 представлена схема, иллюстрирующая адаптацию массы рабочие условия в соответствии с аспектами настоящего изобретения.
На фиг. 5 представлена диаграмма, иллюстрирующая приведенный в качестве примера контроллер, выполненный с возможностью поиска экстремума в соответствии с аспектами настоящего изобретения.
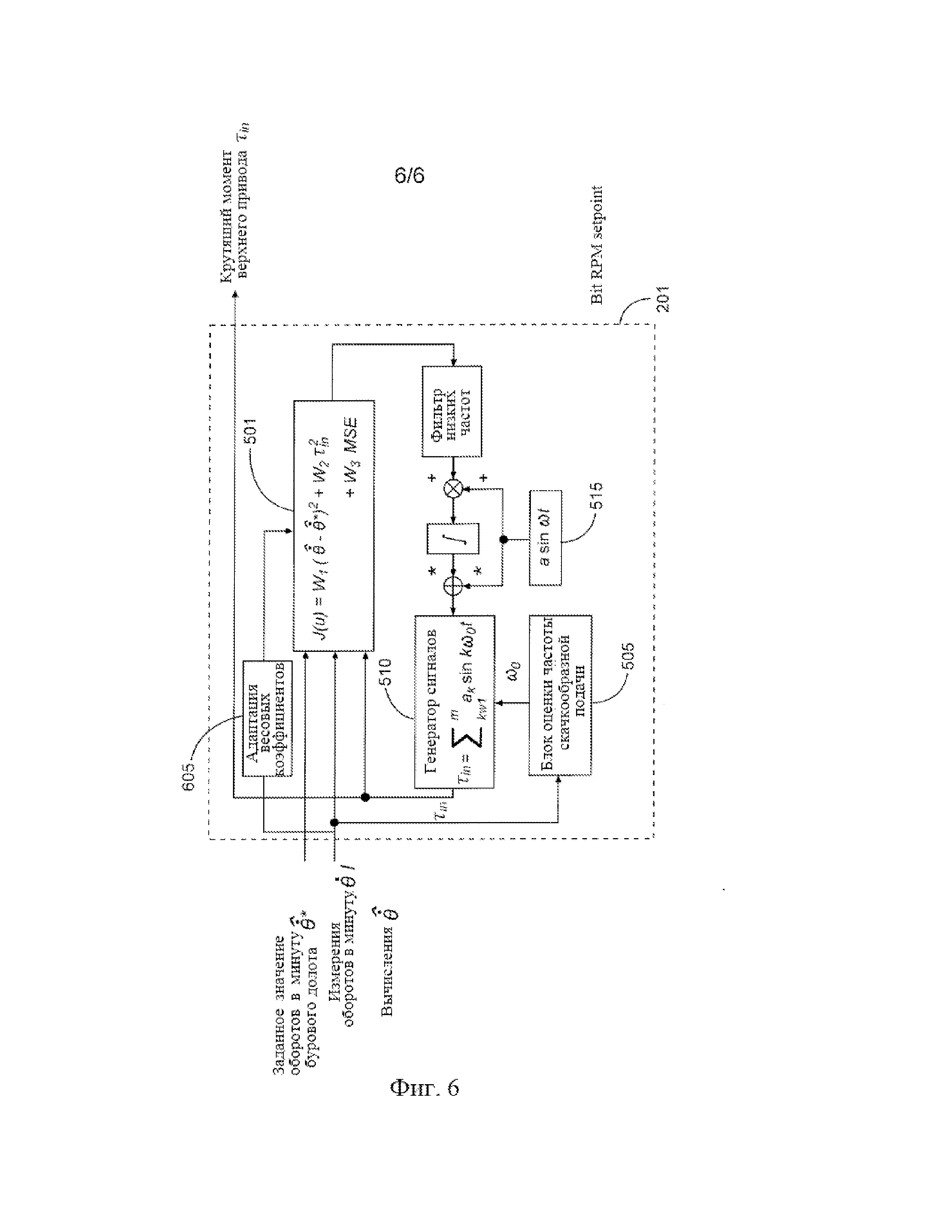
На фиг. 6 представлена диаграмма, иллюстрирующая приведенный в качестве примера контроллер, выполненный с возможностью поиска экстремума, в соответствии с аспектами настоящего изобретения.
Несмотря на то, что варианты реализации настоящего изобретения были изображены и описаны, и изложены посредством ссылки на приведенные в качестве примера варианты реализации изобретения, эти ссылки не ограничивают изобретение, и такое ограничение не подразумевается. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, которые придут на ум специалистам в данной области техники и имеют преимущества данного изобретения. Изображенные и описанные варианты реализации настоящего изобретения являются примерами, и не ограничивают объем изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В контексте настоящего описания, система обработки информации может содержать любые приспособления или сочетание инструментов, выполненных с возможностью вычисления, классификации, обработки, передачи, приема, извлечения, создания, переключения, хранения, отображения, проявления, обнаружения, записи, воспроизведения, управления или использования любой формы информации, сведений или данных для бизнеса, науки, управления или других целей. Например, система обработки информации может являться персональным компьютером, сетевым устройством хранения данных или любым подходящим устройством, и может иметь разный размер, форму, производительность, функциональность и цену. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или большее количество вычислительных средств, таких как центральный процессор (ЦП), или аппаратную или программную схему управления, постоянное запоминающее устройство (ПЗУ) и/или энергонезависимое запоминающее устройство других типов. Дополнительные компоненты системы обработки информации могут содержать один или большее количество дисковых приводов, один или большее количество сетевых портов для обмена данными с внешними устройствами, а также различные устройства ввода-вывода (I/O), такие как клавиатура, мышь и видео дисплей. Система обработки информации может также содержать один или большее количество концентраторов, выполненных с возможностью обеспечения обмена данными между различными аппаратными компонентами. Она также может включать один или большее количество интерфейсных блоков, выполненных с возможностью передачи одного или большего количества сигналов к контроллеру, приводу или подобному устройству.
В целях данного описания читаемые компьютером носители могут содержать любые приспособления или сочетание приспособлений, выполненных с возможностью хранения данных и/или инструкций на протяжении определенного периода времени. Читаемые компьютером носители могут включать, например, носитель данных, такой как запоминающее устройство с прямым доступом (например, жесткий диск или дискета), запоминающее устройство с последовательным доступом (например, магнитная лента), компакт диск, CD-ROM, DVD, ОЗУ, ПЗУ, электрически стираемое программируемое постоянное запоминающее устройство («EEPROM») и/или флеш-память, но не ограничиваются ими; а также средства коммуникации, такие как провода, оптоволокно, микроволны, радиоволны и другие электромагнитные и/или оптические носители; и/или сочетание перечисленного ранее.
Иллюстративные варианты реализации настоящего изобретения более подробно описаны в настоящем описании. Для ясности, в настоящем описании могут быть описаны не все особенности фактической реализации. Конечно, следует понимать, что в разработке любого такого фактического варианта осуществления, для достижения конкретных целей реализации выполняют многочисленные реализации конкретных решений, которые будут отличаться от одной реализации к другой. Кроме того, следует иметь в виду, что такая разработка может быть сложной и трудоемкой, но, тем не менее, благодаря этому описанию, быть рутинным делом для среднего специалиста в данной области техники.
Для способствования лучшему пониманию настоящего изобретения приведены следующие примеры частных вариантов реализации. Следующие примеры не следует воспринимать в качестве ограничения или определения объема изобретения. Варианты реализации настоящего изобретения могут быть применимы к горизонтальным, вертикальным, отклоненным или другим нелинейным стволам скважины в любом типе подземной формации. Варианты реализации могут быть применимы к нагнетательным скважинам, а также эксплуатационным скважинам, включая углеводородные скважины. Варианты реализации могут быть реализованы с использованием приспособления, подходящего для тестирования, извлечения и сэмплирования вдоль секций формации. Варианты реализации могут быть реализованы посредством приспособлений, которые, например, могут быть переправлены через канал потока в колонне труб или с использованием кабеля, тросовой проволоки, колонны гибких труб, скважинного робота и т.п.
В контексте настоящего описания предполагается, что термин «соединены» или «соединен» обозначает непрямое либо прямое соединение. Таким образом, если первое устройство соединено со вторым устройством, такое соединение может быть осуществлено через прямое соединение или через непрямое механическое или электрическое соединение посредством других устройств и соединений. Аналогично, термин «соединен с возможностью обмена данными» обозначает непрямое либо прямое соединение. Такое соединение может быть проводным или беспроводным соединением, таким как, например, Ethernet или локальная сеть LAN. Данные проводные или беспроводные соединения хорошо знакомы специалистам в данной области техники и нет необходимости в более детальном рассмотрении в данной заявке. Таким образом, если первое устройство соединено со вторым устройством с возможностью обмена информацией, такое соединение может быть осуществлено через прямое соединение или через непрямое соединение с возможностью обмена данными посредством других устройств и соединений.
Настоящее изобретение в целом относится к подземным операциям бурения, а, в частности, к стабилизации бурового долота, бурильной колонны и/или скважинных приборов от боковой вибрации и скачкообразной подачи.
Настоящим изобретением в некоторых вариантах реализации созданы способы и системы для управления угловой скоростью бурового долота, присоединенного к верхнему приводу через бурильную колонну, посредством регулирования крутящего момента, прикладываемого верхним приводом на бурильную колонну.
Современные операции бурения и добычи нефти требуют информации относительно параметров и условий в скважине. Существует несколько способов для сбора скважинной информации, включая каротаж во время бурения (logging while drilling, «LWD») и измерения во время бурения (measurement-while drilling, «MWD»). При каротаже во время бурения, данные обычно данные обычно собирают во время процесса бурения, таким образом исключая необходимость удаления буровой компоновки для введения кабельного каротажного прибора. Следовательно, каротаж во время бурения обеспечивает возможность оператору, осуществляющему бурение, вносить точные модификации или исправления в режиме реального времени для оптимизации производительности, при этом сводя к минимуму время простоя. Термин "измерения во время бурения (measurement-while drilling, «MWD»)" обозначает измерение условий в скважине, относящихся к перемещению и расположению буровой компоновки во время продолжения бурения. Каротаж во время бурения более сосредоточен на измерении параметров пласта. Хотя существуют различия между измерениями во время бурения и каротажем во время бурения, термины измерения во время бурения и каротаж во время бурения часто используют взаимозаменяемо. В настоящем описании термин "каротаж во время бурения " будет использован с пониманием того, что этот термин включает сбор параметров пласта и сбор информации, относящейся к перемещению и расположению буровой компоновки.
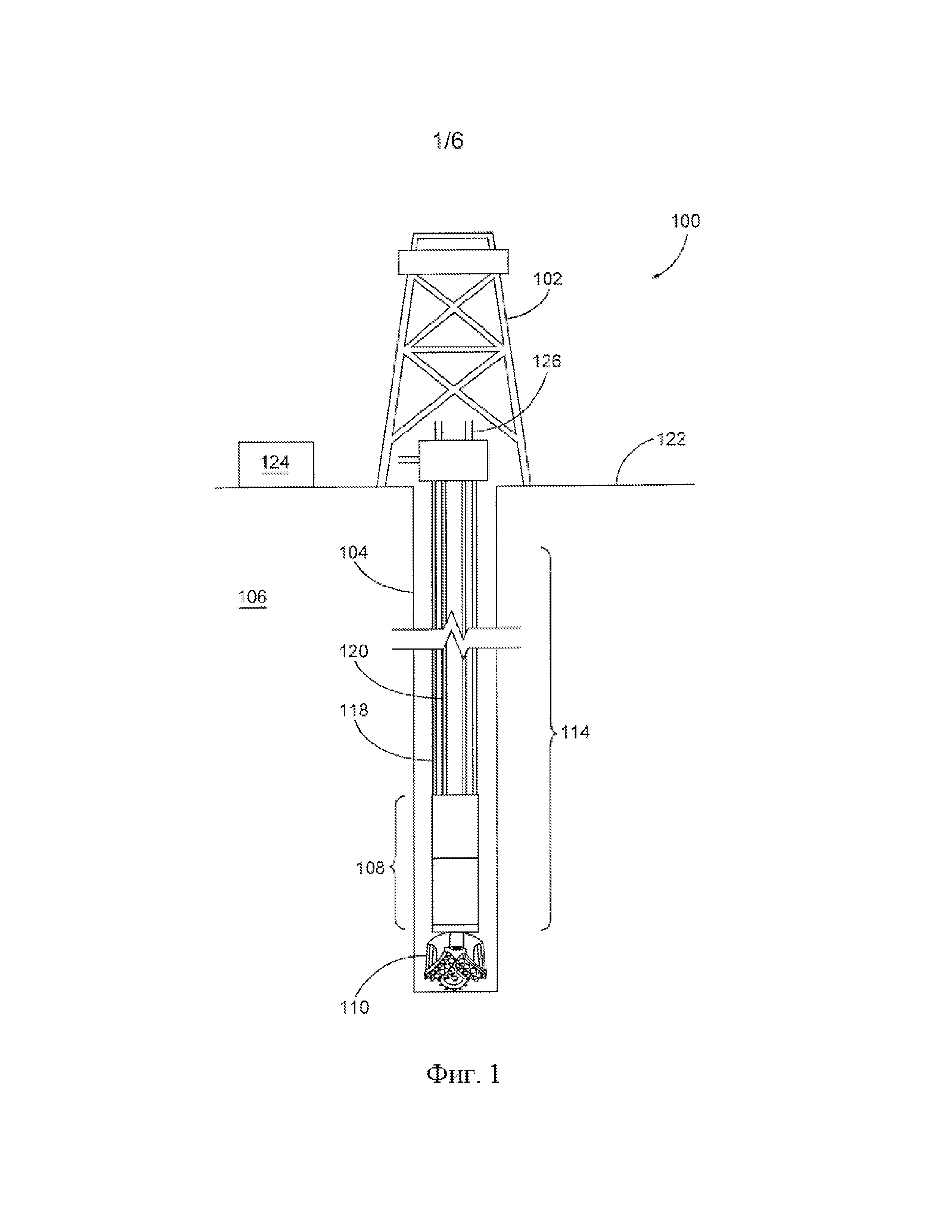
На фиг. 1 изображена приведенная в качестве примера система бурения в соответствии с аспектами настоящего изобретения. Система 100 бурения содержит установку 102, установленную на поверхности 122, расположенную над стволом 104 скважины, находящимся в пределах подземной формации 106. Хотя поверхность 122 изображена в качестве суши на фиг. 1, бурильная установка некоторых вариантов реализации может быть расположена в море, причем поверхность 122 содержит бурильную платформу. Бурильная установка 102 может содержать верхний привод 126, присоединенный к бурильной колонне 114, который может, как показано на фиг. 1, содержать несколько бурильных труб (например, внутреннюю трубу 120 и наружную трубу 118). Блок 124 управления на поверхности 122 может управлять ориентацией по меньшей мере некоторого из бурильного оборудования, включая верхний привод 126. Блок 124 управления сможет содержать систему управления (которая, в свою очередь, может быть или может содержать систему обработки информации), которая может быть присоединена по меньшей мере к некоторому из бурильного оборудования, включая верхний привод 126, с возможностью обмена данными.
Бурильная колонна в некоторых вариантах реализации может дополнительно содержать забойное оборудование (bottom hole assembly, «BHA») 108, которое может содержать приспособления, такие как элементы каротажа во время бурения/измерения во время бурения, присоединенные к наружным и внутренним трубам. Элементы каротажа во время бурения/измерения во время бурения могут содержать скважинные инструменты. Во время бурения эти инструменты могут непрерывно и циклично наблюдать за заранее заданными параметрами бурения и данными формации, и передавать информацию к поверхностному детектору посредством определенной формы телеметрии. Альтернативно, данные могут храниться во время нахождения инструментов в скважине и могут быть извлечены на поверхность позже после извлечения бурильной колонны. Бурильная колонна 114 присоединена к буровому долоту 110 таким образом, чтобы обеспечивать присоединение бурового долота 110 к верхнему приводу 126 через бурильную колонну 114. Соответственно, верхний привод 126 может прикладывать крутящий момент к бурильной колонне 114, которая, в свою очередь, прикладывает крутящий момент к буровому долоту 110, обеспечивая его вращение с угловой скоростью  бурового долота.
бурового долота.
В определенный момент или моменты времени во время процесса бурения, вся буровая компоновка (включая буровое долото 110 и бурильную колонну 114) или ее часть может «застревать» во время контакта со стволом 104 скважины, в результате чего вращательное движение бурильной колонны 114 и/или бурового долота 110 останавливается или существенно уменьшается. Приложение крутящего момента на бурильную колонну 114 может быть продолжено от верхнего привода 126, несмотря на застревание бурильной колонны 114 (или определенного ее участка) и/или бурового долота 110, что приводит к скручиванию бурильной колонны 114 над застрявшим участком. После преодоления крутящим моментом силы трения на застрявший компонент, бурильная колонна 114 и/или буровое долото 110 может «выскальзывать» или освобождаться от стенки 104 ствола скважины. Это явление «выскальзывания» и «застревания» может уменьшать срок эксплуатации скважинных компонентов, включая буровое долото 110, измеряющих элементов каротажа во время бурения/измерения во время бурения внутри забойного оборудования 108, и уменьшать качество ствола 104 скважины.
Способы управления в соответствии с некоторыми вариантами реализации будут более подробно описаны далее со ссылкой на следующие чертежи. Такие способы могут быть реализованы в различных вариантах реализации посредством системы управления, такой как система управления, содержащаяся в блоке 124 управления по фиг. 1. Система управления может содержать контроллер, присоединенный с возможностью обмена данными к приводу, присоединенному к верхнему приводу (т.е. устройству, подходящему для воздействия на физические изменения на выходной крутящий момент верхнего привода на основании управляющих сигналов, направляемых контроллером). Кроме того, контроллер в соответствии с некоторыми вариантами реализации может являться систему управления информацией или содержать ее. Таким образом, например, контроллер может содержать по меньшей мере одни вычислительные средства, интерфейсный блок, выполненный с возможностью направления управляющего сигнала к исполнительному механизму верхнего привода, и читаемый компьютером носитель, содержащий выполняемые команды, подходящие для осуществления любого одного или большего количества способов управления в соответствии с настоящим изобретением. В других вариантах реализации система управления может содержать средство для вывода руководства управляющего сигнала (например, монитор или другой механизм отображения и/или механизм звуковых сигналов, или любое другое устройство, подходящее для вывода руководства управляющего сигнала) для обеспечения возможности осуществления оператором данного руководства управляющего сигнала посредством ручного ввода в механизм управления для управления верхним приводом.
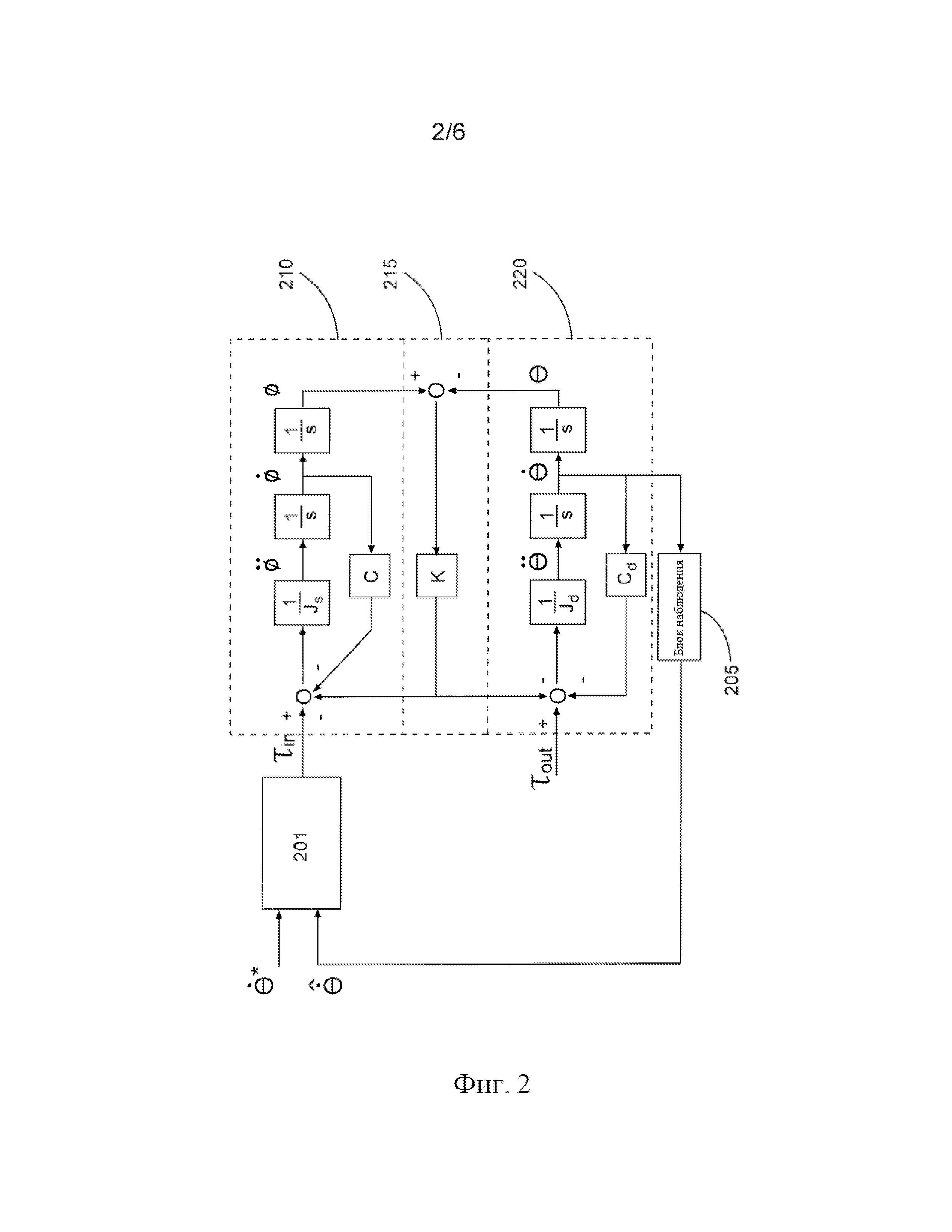
На фиг. 2 представлена блок-диаграмма управления технологичным процессором, иллюстрирующая приведенный в качестве примера способ управления в соответствии с некоторыми вариантами реализации. Пример, приведенный на фиг. 2, является способом управления замкнутым контуром, использующим элемент 201 управления оптимизацией. Элемент управления оптимизацией может выводить управляющий сигнал τin, а управление верхним приводом может быть по меньшей мере частично осуществлено на основании управляющего сигнала τin. То есть, например, управление верхним приводом может быть осуществлено управляющим сигналом τin, таким образом, чтобы обеспечивать требуемую угловую скорость бурового долота (например, посредством обеспечения приложения верхним приводом определенного крутящего момента к верхнему участку бурильной колонны). Таким образом, управляющий сигнал τin в некоторых вариантах реализации может содержать крутящий момент, требуемый для достижения верхним приводом. В некоторых вариантах реализации он может содержать крутящий момент, требуемый для приложения к верхнему приводу посредством привода или подобного устройства для достижения требуемого крутящего момента, прикладываемого верхним приводом к бурильной колонне. Управляющий процесс может являться итерационным (например, первый управляющий сигнал τin может управлять верхним приводом для достижения первой угловой скорости бурового долота, затем второй управляющий сигнал τin может управлять верхним приводом для достижения второй угловой скорости бурового долота, и т.п. при необходимости и/или по требованию).
Способ управления может дополнительно включать моделирование физических динамических характеристик в соответствии с передаточными функциями, изображенными в блок-диаграмме на фиг. 2, которые в сочетании в соответствии с соотношениями, изображенными на указанной блок-диаграмме, могут составлять совмещенную передаточную функцию g1(τin). На примере по фиг. 2 совмещенная передаточная функция содержит передаточные функции, изображенные на фиг. 2, относительно: (i) входного крутящего момента, прикладываемого верхним приводом к бурильной колонне (как по меньшей мере частично определено управляющим сигналом τin); (ii) крутящего момента трения на буровое долото, τout (который может быть непосредственно измерен или вычислен на основании смоделированных динамических характеристик по фиг. 2); угловой скорости верхнего привода
 (которая также содержит, как показано на фиг. 2, скорость изменения угловой скорости
(которая также содержит, как показано на фиг. 2, скорость изменения угловой скорости
 верхнего привода и угла φ верхнего привода); и угловой скорости
бурового долота (которая также содержит, как показано на фиг. 2, скорость изменения угловой скорости
верхнего привода и угла φ верхнего привода); и угловой скорости
бурового долота (которая также содержит, как показано на фиг. 2, скорость изменения угловой скорости
 бурового долота и угла θ бурового долота). На фиг. 2 дополнительно изображены участки передаточных функций в пределах блок-диаграммы, относящиеся к динамическим характеристикам верхнего привода 210, бурильной колонны 215 и бурового долота 220. В некоторых вариантах реализации физических динамических характеристик может быть моделирована в соответствии с любым способом, выбранным для описания физической бурильной системы. Например, бурильный процесс может быть моделирован в качестве системы масса-пружина-демпфер, как показано передаточными функциями, приведенными в соответствии с блок-диаграммой по фиг. 2.
бурового долота и угла θ бурового долота). На фиг. 2 дополнительно изображены участки передаточных функций в пределах блок-диаграммы, относящиеся к динамическим характеристикам верхнего привода 210, бурильной колонны 215 и бурового долота 220. В некоторых вариантах реализации физических динамических характеристик может быть моделирована в соответствии с любым способом, выбранным для описания физической бурильной системы. Например, бурильный процесс может быть моделирован в качестве системы масса-пружина-демпфер, как показано передаточными функциями, приведенными в соответствии с блок-диаграммой по фиг. 2.
Дополнительно, в некоторых вариантах реализации способ управления может включать блок 205 наблюдения, как показано на фиг. 2. Блок наблюдения может вычислять угловую скорость бурового долота на основании любого количества измерений в системе, которые могут относиться к угловой скорости бурового долота в соответствии с смоделированных динамических характеристик (например, как показано на фиг. 2). Например, он может вычислять угловую скорость бурового долота по меньшей мере частично на основании крутящего момента, прикладываемого верхним приводом к бурильной колонне (τin). В некоторых вариантах реализации он может вычислять угловую скорость бурового долота по меньшей мере частично на основании реактивного крутящего момента, прикладываемого на верхний привод в ответ на приложение верхним приводом крутящего момента τin к бурильной колонне. В частных вариантах реализации блок наблюдения может вычислять угловую скорость бурового долота по меньшей мере частично на основании различных скважинных измерений, таких как, например, предыдущие образцы угловой скорости бурового долота. Кроме того, измерение предыдущего входного крутящего момента верхнего привода, соответствующего предыдущим образцам измеренной угловой скорости бурового долота (например, крутящий момент, прикладываемый верхним приводом к бурильной колонне для предоставления предыдущей измеренной угловой скорости бурового долота), может быть использовано блоком наблюдения. В дополнение или вместо указанных ранее измерений в некоторых вариантах реализации блок наблюдения может использовать другие измерения, такие как: усилие на буровое долото, крутящий момент на буровое долото, и/или скорость вращения на определенной одной или большем количестве точек вдоль бурильной колонны (например, в соответствии с измерением посредством датчика на одной или большем количестве точек вдоль бурильной колонны). Эти измерения в некоторых вариантах реализации могут быть использованы в сочетании с моделью для определения различных параметров для использования в модели (например, коэффициент трения, который может быть выведен по меньшей мере частично на основании измерений усилия, прикладываемого к буровому долоту и крутящего момента на буровом долоте).
В других вариантах реализации угловая скорость бурового долота может быть непосредственно измерена, или она может быть смоделирована на основании управляющих входных сигналов. Смоделированную, измеренную или вычисленную угловую скорость бурового долота направляют к элементу 201 управления оптимизацией (например, в качестве сигнала угловой скорости бурового долота), который, в свою очередь, генерирует управляющий сигнал τin по меньшей мере частично на основании угловой скорости бурового долота, заданного значения угловой скорости * бурового долота и целевой функции (которая в некоторых вариантах реализации может являться частью оптимизационной задачи).
Например, на фиг. 3 изображен вариант реализации элемента 201 управления оптимизацией, содержащий оптимизационную задачу 301. В вариантах реализации в соответствии с изображенным на фиг. 3 управляющий процесс может использовать управление на основе прогнозирующих моделей (model predictive control, «MPC»); то есть, генерация управляющего сигнала может быть по меньшей мере частично основана на алгоритме управления на основе прогнозирующих моделей. В частности, данный алгоритм может содержать физическую модель динамических характеристик управляемой системы. В частности, в некоторых вариантах реализации, управление на основе прогнозирующих моделей может использовать одну или большее количество моделей для динамического уравновешивания эффективности бурения и устранения скачкообразной подачи в соответствии с одним или большим количеством рабочих условий. Оптимизационная задача 301 может поддерживать модель, характеризующую соотношение ввода-вывода процесса бурения, например, модель динамических характеристик между входным крутящим моментом, воздействующим на верхний привод, и получаемой в результате угловой скоростью бурового долота (например, g1(τin), выведенное из моделирования передаточных функций системы по фиг. 2, как указано ранее). Оптимизационная задача 301 может также содержать целевую функцию, для которой требуется нахождение оптимального решения, зависящего от одного или большего количества ограничений. Оптимальное решение может, например, являться минимальным или максимальным значением целевой функции (зависящим от одного или большего количества ограничений). В некоторых вариантах реализации одно или большее количество ограничений может содержать модель динамических характеристик между входным крутящим моментом на верхний привод и полученной в результате угловой скоростью бурового долота. Целевая функция некоторых вариантов реализации может содержать одно или большее количество условий. Любое одно или большее количество условий целевой функции может описывать физический аспект системы, содержащей верхний привод и буровое долото. В некоторых вариантах реализации каждое условие может описывать одну или большее количество физических динамических характеристик любого одного или большего количества из верхнего привода, бурового долота и бурильной колонны. В некоторых вариантах реализации целевая функция может также содержать один или большее количество штрафных условий для наложения штрафа на нарушение одного или большего количества ограничений, от которых зависит целевая функция. Например, целевая функция может содержать штрафное условие вращения бурильной колонны для наложения штрафа на вращение части бурильной колонны с угловой скоростью, превышающей максимальную угловую скорость, таким образом обеспечивая более медленное угловое вращение или более медленное увеличение углового вращения в решении к целевой функции. Ограничения более подробно описаны далее. Кроме того, в частных вариантах реализации любое одно или большее количество условий может соответствовать мультипликативному весовому коэффициенту.
Например, целевая функция некоторых вариантов реализации может быть выражена следующим образом:
 (Уравнение 1)
(Уравнение 1)
Целевая функция по уравнению 1 является функцией стоимости, содержащей 3 условия: условие уменьшение скачкообразной подачи, в этом примере  (которое в приведенной в качестве примера целевой функции по уравнению 1 является ошибкой слежения угловой скорости бурового долота по сравнению с заданным значением угловой скорости бурового долота), соответствующее первому весовому коэффициенту W1; условие плавности входного крутящего момента, в этом примере (Δτin,j)2 (описывающее изменения в крутящем моменте, прикладываемым верхним приводом к бурильной колонне таким образом, чтобы меньшее изменение могло равняться более плавной работе) соответствующее второму весовому коэффициенту W2; и условие эффективности бурения, в настоящем описании механическая удельная энергия (mechanical specific energy, «MSE»), соответствующее третьему весовому коэффициенту W3. В некоторых вариантах реализации механическая удельная энергия может являться количеством энергии, требуемым на удельный объем пластовой породы формации, бурение которой осуществляют посредством бурового долота. Минимизация механической удельной энергии, следовательно, может приводить к наивысшей эффективности (с точки зрения энергии, используемой на количество вырубленной породы).
(которое в приведенной в качестве примера целевой функции по уравнению 1 является ошибкой слежения угловой скорости бурового долота по сравнению с заданным значением угловой скорости бурового долота), соответствующее первому весовому коэффициенту W1; условие плавности входного крутящего момента, в этом примере (Δτin,j)2 (описывающее изменения в крутящем моменте, прикладываемым верхним приводом к бурильной колонне таким образом, чтобы меньшее изменение могло равняться более плавной работе) соответствующее второму весовому коэффициенту W2; и условие эффективности бурения, в настоящем описании механическая удельная энергия (mechanical specific energy, «MSE»), соответствующее третьему весовому коэффициенту W3. В некоторых вариантах реализации механическая удельная энергия может являться количеством энергии, требуемым на удельный объем пластовой породы формации, бурение которой осуществляют посредством бурового долота. Минимизация механической удельной энергии, следовательно, может приводить к наивысшей эффективности (с точки зрения энергии, используемой на количество вырубленной породы).
В некоторых вариантах реализации целевая функция может быть решена для нахождения крутящего момента верхнего привода, сводящего к минимуму значение функции (например, значение Δτin,j, обеспечивающее минимальное J), таким образом определяя оптимальный сигнал τin входного крутящего момента для генерации. Таким образом, в изображенном примере сведение J к минимуму может приводить к сведению к минимуму каждого из ошибки слежения угловой скорости бурового долота, поступательных изменений в крутящем моменте (таким образом обеспечивая более плавную работу) и механической удельной энергии (таким образом сводя к минимуму энергию, требуемую для бурения данного объема внутрь формации). Кроме того, целевая функция (и, следовательно, ее решение) может зависеть от одного или большего количества ограничений, включая модель динамических характеристик между входным крутящим моментом, воздействующим на верхний привод и угловую скорость бурового долота. Ограничения некоторых вариантов реализации могут включать, например:
|
То есть ошибка слежения угловой скорости бурового долота по сравнению с заданным значением угловой скорости бурового долота может зависеть от ограничения угловой скорости бурового долота, предполагаемого моделью динамических характеристик между входным крутящим моментом верхнего привода и обеспеченной в результате угловой скоростью бурового долота (Уравнение 2). Механическая удельная энергия, используемая как индекс эффективности, может являться эмпирической функцией g2(τin, ), выражающей эффективность бурения (Уравнение 3) (которая может быть выведена на основании данных и/или математических описаний физических динамических характеристик энергии на единицу выбуренного объема). Угловая скорость бурового долота и входной крутящий момент на верхний привод могут быть ограничены механическими ограничениями (такими как, например, максимальная угловая скорость, усилие на буровое долото или другой параметр для безопасной и/или не наносящей повреждений работы и т.п.) на каждом из этих компонентов в системе (Уравнение 4 и 5).
Элемент 201 управления оптимизацией в некоторых вариантах реализации может также содержать адаптивную модель 305 для обновления модели (например, модели g1(τin)) по меньшей мере частично на основании рабочих данных, соответствующих любому одному или большему количеству из верхнего привода, бурового долота и бурильной колонны для получения обновленной модели. Это может являться предпочтительным в некоторых случаях, в которых модель содержит условия не полностью известные, измерены или вычислены (например, K, C и Cd по фиг. 1, использованные в модели g1(τin)), таким образом, чтобы обеспечивать возможность обновления модели для адаптации к рабочим данным. Рабочие данные могут содержать реактивный крутящий момент, прикладываемый к верхнему приводу в ответ на приложение верхним приводом крутящего момента τin к бурильной колонне; предыдущие образцы угловой скорости бурового долота (которая может быть фактически измерена, и/или вычислена, например, блоком 205 наблюдения); усилие на бурильное долото, крутящий момент на бурильное долото; измеренная скорость вращения на любой одной или большем количестве точек вдоль бурильной колонны (например, датчиками на данном участке (участках) вдоль бурильной колонны). В некоторых вариантах реализации может быть использован ранее измеренный и/или вычисленный входной крутящий момент, прикладываемый верхним приводом, соответствующий образованной в результате угловой скорости бурового долота (которая также может быть измеренной и/или вычисленной ранее).
Кроме того, элемент 201 управления оптимизацией может содержать элемент 310 адаптации массы для обновления одного или большего количества весовых коэффициентов по меньшей мере частично на основании одного или большего количества рабочих условий, соответствующих буровому долоту для включения обновленных весовых коэффициентов в целевую функцию. Рабочие условия, на основании которых обеспечивается обновление весового коэффициента, могут содержать любое одно или большее количество рабочих условий, описанных ранее относительно обновлений модели. В некоторых вариантах реализации обновления модели и весового коэффициента могут быть основаны по существу на одинаковых рабочих условиях (измеренных и/или вычисленных). Хотя, в некоторых из этих вариантов реализации обновления модели могут приводить к лучшему вычислению настоящего состояния бурильной системы, а обновления весового коэффициента могут приводить к лучшей работе (например, работа, направленная на уменьшение скачкообразной подачи, сведение к минимуму энергии на единицу выбуренного объема и т.д.).
Как указано, в частных вариантах реализации весовые коэффициенты могут быть обновлены для увеличения или уменьшения, по требованию, значимости условия, соответствующего определенному весовому коэффициенту. Например, при индикации рабочими условиями происходящей или возможной существенной скачкообразной подачи, весовой коэффициент, соответствующий условию уменьшения скачкообразной подачи может быть соответственно увеличен для увеличения значимости этого аспекта целевой функции (таким образом, увеличивая значимость уменьшения скачкообразной подачи в управляющем сигнале τin). Одновременно, меньшая значимость может быть закреплена за условием эффективности бурения для дальнейшего смещения фокуса от эффективности бурения (например, максимальной угловой скорости бурового долота) на сведение к минимуму скачкообразной подачи (например, посредством уменьшения угловой скорости бурового долота).
В некоторых вариантах реализации элемент 310 адаптации массы может содержать, ссылаться или другим образом зависеть по меньшей мере частично от функции и/или модели, относящей скачкообразную подачу к одному или большему количеству рабочих условий. Например, на фиг. 4 изображена модель, содержащая схему усилия на буровое долото от оборотов в минуту (обороты бурового долота в минуту), которая может быть использована в качестве альтернативного выражения угловой скорости
бурового долота. Фиг. 4 также содержит модель функции, в которой рабочие условия усилия на буровое долото и оборотов в минуту могут приводить к скачкообразной подаче (такая функция может, например, храниться в элементе 310 адаптации массы некоторых вариантов реализации), а также содержит иллюстративные точки A, B и C, указывающие на приведенные в качестве примера рабочие условия, при которых различные обновления массы могут зависеть от элемента 310 адаптации массы. Например, если рабочие условия для усилия на буровое долото и оборотов в минуту соответствуют точке A, модель по фиг. 4 указывает на наличие существенной скачкообразной подачи, а весовой коэффициент, соответствующий условию уменьшения скачкообразной подачи может быть соответственно увеличен для увеличения значимости уменьшения скачкообразной подачи, а весовой коэффициент, соответствующий эффективности бурения, может быть уменьшен для уменьшения значимости эффективности бурения. В контексте приведенной в качестве примера целевой функции по уравнению 1, весовой коэффициент W1, соответствующий условию
уменьшения скачкообразной подачи, будет увеличен элементом 310 адаптации массы при нахождении рабочих условий на точке A на фиг. 4, а весовой коэффициент W3, соответствующий условию эффективности бурильной механической удельной энергии, будет уменьшен. Со ссылкой на уравнение 1 в иллюстративных целях, если вместо этого настоящие условия бурения совпадают с точкой B на схеме по фиг. 4, модель рабочих условий указывает только на наличие незначительной скачкообразной подачи, или ее отсутствие, таким образом, чтобы обеспечивать возможность выбора значений W1 и W3 для приблизительно одинаковых усилий управления, направленных на уменьшение скачкообразной подачи, и на увеличение эффективности энергии бурения. А если настоящие условия бурения совпадают с точкой C за пределами области скачкообразной подачи, W1 может быть установлено на малое значение для предотвращения перемещения процесса назад к области скачкообразной подачи, смещая фокус управления по существу на эффективность энергии бурения.
Кроме того, скорости изменений весового коэффициента или факторов могут быть ограничены для обеспечения устойчивости бурильной системы, например, посредством установления ограничений на скорость изменения. В некоторых вариантах реализации скорость изменений весового коэффициента (весовых коэффициентов) может быть ограничена для удовлетворения функции Ляпунова, используемой для ограничения общей энергии бурильной системы. Это может способствовать предотвращению резких изменений массы, которые могут приводить к нежелательным крупным колебаниям в управляющем сигнале τin крутящего момент верхнего привода и угловой скорости
бурового долота. Функция Ляпунова некоторых вариантов реализации может являться функцией, характеризующей устойчивость бурильной системы. Эта функция должна иметь общую форму, но может быть составлена отдельно для каждой системы. Однако в некоторых случаях функция Ляпунова может иметь квадратичную форму, содержащую, например, общую потенциальную и кинетическую энергию системы. В вариантах реализации, в которых функции Ляпунова использованы для ограничения общей энергии бурильной системы, могут требоваться новые весовые коэффициент для удовлетворения условию, заключающемуся в том, что функция Ляпунова не увеличивается со временем. Таким образом, затем такие варианты реализации могут исключать увеличение общей потенциальной и кинетической энергии системы со временем.
Дополнительно, элемент 201 управления оптимизацией может также содержать элемент 315 обновления внутреннего состояния управлением на основе прогнозирующих моделей («MPC»), который может быть использован для лучшего вычисления настоящего состояния бурильной системы и/или прогнозирования будущей работы системы. При наличии доступного измерения, его применяют для моделирования для обновления состояния. Затем, управляющий сигнал может быть сгенерирован по меньшей мере частично на основании внутреннего состояния (внутренних состояний). Следовательно, элемент 315 обновления внутреннего состояния управлением на основе прогнозирующих моделей может способствовать итеративной функции контура управления (например, вывод управляющего сигнала приводит к одному или большему количеству выводов системы, такому как угловая скорость бурового долота (например, оборотов в минуту), вывод(ы) которого, в свою очередь, измеряют и/или вычисляют, причем измерение (измерения) и/или вычисление (вычисления) затем подают назад к модели для генерации управляющего сигнала, соответствующему обновленному состоянию модели.
Специалисту в данной области техники после ознакомления с настоящим описанием будет понятно, что управление управляющим процессом в некоторых вариантах реализации может являться итеративным. То есть, первый управляющий сигнал τin может быть сгенерирован по меньшей мере частично на основании заданного значения угловой скорости бурового долота, первой угловой скорости бурового долота и оптимизационной задачи, содержащей (i) целевую функцию в первом состоянии и (ii) одно или большее количество ограничений первого состояния, от которых зависит оптимизационная задача, такие ограничения включают модель динамических характеристик между крутящим моментом верхнего привода и образованной в результате угловой скоростью бурового долота; управление верхним приводом может по меньшей мере частично быть осуществлено на основании первого управляющего сигнала; рабочие условия, соответствующие буровому долоту, и/или рабочие данные, соответствующие любому одному или большему количеству из верхнего привода, бурового долота и бурильной колонны, могут быть наблюдаемы, измерены, вычислены, смоделированы или получены другим образом; и любое одно или большее количество из модели и целевой функции может быть обновлено на основании рабочих условий и/или рабочих данных - то есть, модель (такая как g1(τin)) может быть обновлена, и/или весовые коэффициенты целевой функции W1, W2 и т.д. могут быть обновлены. Затем, второй управляющий сигнал может быть сгенерирован по меньшей мере частично на основании заданного значения угловой скорости бурового долота, второй угловой скорости бурового долота (например, угловая скорость бурового долота, образованная в результате крутящего момента верхнего привода, полученного в ответ на первый управляющий сигнал) и оптимизационной задачи, содержащей (i) целевую функцию во втором состоянии (например, с обновленными весовыми коэффициентами W1 и т.д.) и (ii) одно или большее количество ограничений второго состояния (включая обновленную модель). Разумеется, существует вероятность отсутствия изменения модели и/или весовых коэффициентов по сравнению с их первыми состояниями во время обновления, причем целевая функция во втором состоянии и/или ограничения второго состояния не отличаются (или существенно не отличаются) от первого состояния. Кроме того, процесс может быть повторен по требованию или при необходимости во время процесса бурения.
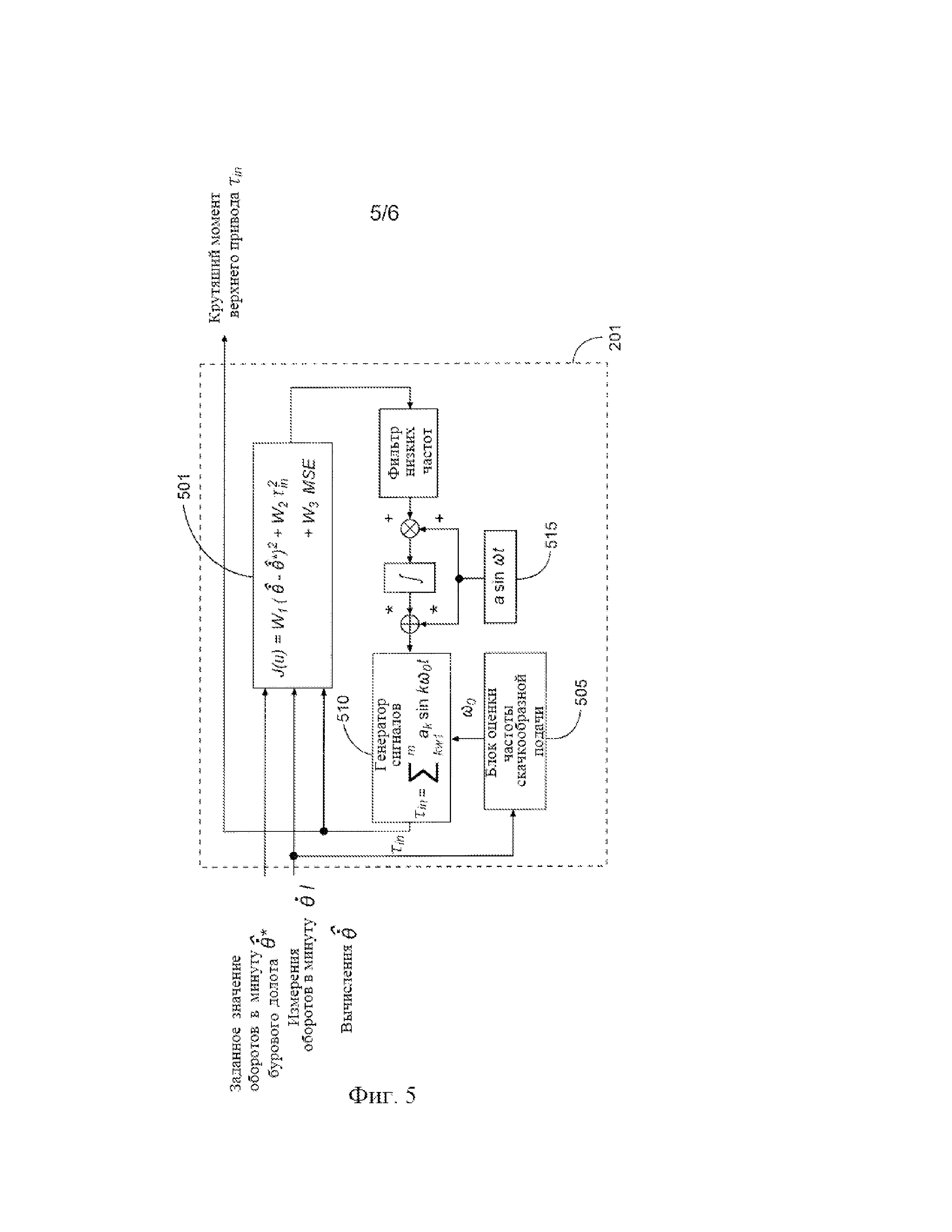
На фиг. 5 изображен еще один приведенный в качестве примера элемент 201 управления оптимизацией в соответствии с другими вариантами реализации, которые не содержат модель в решении к оптимизационной задаче. Вместо нее, варианты реализации в соответствии с этим примером могут использовать форму управления с поиском экстремума (extremum seeking control, «ESC»), то есть генерация управляющего сигнала может быть по меньшей мере частично основана на алгоритме управления с поиском экстремума. Такие варианты реализации могут содержать минимизацию, уменьшение и/или устранение скачкообразной подачи без моделей посредством управления сочетанием последовательности синусоидальных волн. В некоторых вариантах реализации может содержаться целевая функция 501 (аналогичная целевой функции, которая может быть использована в различных вариантах реализации элемента 201 управления оптимизацией в соответствии с фиг. 3, такой как уравнение 1, и таким образом включать одно или большее количество условий и/или штрафных условий, как описано ранее в соответствии с уравнением 1). Целевая функция 501 может иметь одно или большее количество градиентных направлений таким образом, чтобы обеспечивать возможность минимизации функции вдоль любого одного или большего количества указанных градиентных направлений. Дополнительно, каждое условие целевой функции 501 может содержать весовой коэффициент. Аналогично весовым коэффициентам целевых функций для использования в описанных ранее вариантах реализации с управлением на основе прогнозирующих моделей, весовые коэффициенты некоторых вариантов реализации с управлением с поиском экстремума могут быть обновлены по меньшей мере частично на основании любого одного один или большего количества рабочих условий. Таким образом, управление с поиском экстремума в соответствии с некоторыми вариантами реализации может содержать элемент 605 адаптации массы, аналогичный элементу 310 адаптации массы по фиг. 3, как показано на фиг. 6. Элемент 605 адаптации массы использует входные измеренные и/или вычисленные рабочие условия (показанные на фиг. 6 как измерения угловой скорости/оборотов в минуту бурового долота). Таким образом, например, хотя не показано на фиг. 5 или 6, элемент 605 адаптации массы может дополнительно использовать сигнал τin (и/или измеренный крутящий момент верхнего привода, фактически прикладываемый к бурильной колонне). А в некоторых вариантах реализации модуль адаптации массы может использовать любые другие входные измерения и/или вычисления рабочих условий, такие как описанные ранее в настоящем описании.
Элемент 201 управления оптимизацией в соответствии с вариантами реализации по фиг. 5 или 6 может дополнительно содержать блок 505 оценки частоты скачкообразной подачи, а управляющий сигнал τin, сгенерированный в соответствии с такими вариантами реализации может следовательно по меньшей мере частично основан на вычисленной частоте скачкообразной подачи и целевой функции, таким образом, чтобы в соответствии с сигналом уменьшать управлением верхнего привода значения целевой функции вдоль любого одного или большего количества одного или большего количества градиентных направлений.
Блок 505 оценки частоты скачкообразной подачи вычисляет частоту скачкообразной подачи, обеспечивая противодействие управляющего сигнала τin скачкообразной подаче в соответствии с вычисленной частотой. В частности, так как угловая скорость бурового долота может быть периодической при возникновении скачкообразной подачи, частота скачкообразной подачи может быть вычислена из профиля угловой скорости бурового долота на протяжении периода времени. Более конкретно, в некоторых вариантах реализации преобразование Фурье может быть осуществлено с профилем угловой скорости бурового долота на протяжении периода времени (то есть, ряд Фурье может быть использован для приближенного выражения угловой скорости бурового долота), который разделяет сигнал скачкообразной подачи в ряд синусоидальных волн. Частоты волн могут составлять целое кратное частоты скачкообразной подачи, обеспечивая возможность осуществления блоком 505 оценки частоты скачкообразной подачи частотного анализа (например, анализа спектральной функции) сигнала угловой скорости бурового долота, преобразованного в ряд Фурье, на протяжении периода времени для вычисления основной частоты ω0 скачкообразной подачи. Управляющий сигнал, сгенерированный генератором 510 сигналов, в соответствии с некоторыми вариантами реализации может быть выражен, например:
 (Уравнение. 6)
(Уравнение. 6)
где каждый ak выражает коэффициент ряда Фурье (например, полученный в результате преобразования Фурье профиля угловой скорости бурового долота на протяжении периода времени), k выражает число, соответствующее коэффициенту ряда Фурье с порядковым номером k, ω0 выражает основную частоту скачкообразной подачи, а t выражает время.
В некоторых вариантах реализации управление с поиском экстремума может быть достигнуто посредством добавления синусоидального сигнала к коэффициентам ak ряда Фурье для генерации неоднородностей, в соответствии с уравнением 6 и как изображено генератором 515 синусоидальных сигналов на фиг. 5. Градиентная информация целевой функции 501 может затем быть вычислена (например, посредством демодуляции), а управляющий сигнал τin, уменьшающий целевую функцию вдоль вычисленного градиентного направления, генерируют посредством генератора 510 сигналов через коэффициенты ak.
Способы управления различных вариантов реализации настоящего изобретения могут предпочтительно уменьшать или устранять скачкообразную подачу, обеспечивая максимальную эффективность бурения, посредством управления крутящим моментом верхнего привода (и, следовательно, угловой скорости бурового долота) в ответ на различные вводы, включая (непосредственно или косвенно) скважинные и другие рабочие условия. В целом, различные способы управления могут быть применимы в уменьшении скважинных вибраций (таких как на буровом болоте) в соответствии с аналогичным или идентичным механизмом, используемым для уменьшения или устранения скачкообразной подачи. Таким образом, описание некоторых из различных вариантов реализации в настоящем описании относительно сведения скачкообразной подачи к минимуму (например, относительно схемы рабочих условий на фиг. 4) может также быть применимо к уменьшению вибраций в целом в других вариантах реализации, используя такие же принципы. Например, при образовании вибрации от одинакового или подобного источника или источников, от которого образована скачкообразная подача (например, силы трения, прикладываемые формацией на буровое долото), управление вибрацией может быть осуществлено аналогичными или подобными описанным в настоящем описании способами.
Следовательно, настоящее изобретение хорошо приспособлено для достижения описанных и свойственных результатов и преимуществ. Частные варианты реализации, описанные ранее, являются иллюстративными, так как настоящее изобретение может быть модифицировано и реализовано другими, но эквивалентными способами, понятными специалистам в данной области техники, у которых есть возможность ознакомиться с настоящим описанием. Кроме того, описанные в настоящем описании подробности конструкции или проекта не содержат ограничений за исключением описанных далее в формуле изобретения. Таким образом, следует понимать, что частные иллюстративные варианты реализации, раскрытые ранее, могут быть изменены или модифицированы, при этом все такие изменения находятся в пределах объема и сущности настоящего изобретения. Также, термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем. Под использованной в формуле изобретения формой единственного числа следует понимать один или большее количество элементов.
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости

