Результат интеллектуальной деятельности: Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования
Вид РИД
Изобретение
Изобретение относится к радиолокационной измерительной технике и может быть использовано, в частности, в составе радиолокационных измерительных стендов многочастотного импульсного зондирования и инверсного синтеза апертуры антенны, осуществляющих построение двумерных радиолокационных изображений (РЛИ) исследуемых объектов.
Методы получения РЛИ объекта основаны на цифровой обработке комплексной огибающей отраженного от него сигнала, измеренного в широкой полосе частот зондирующих импульсов радиолокационной системы (РЛС) при различных ракурсах наблюдения вращающегося объекта.
Известен [Патент RU 2422851 С1 «Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании» МПК: G01S 13/89 (2006.01), 27.06.2011] способ получения двумерного радиолокационного изображения в большом диапазоне изменения величин эффективных площадей рассеивания (ЭПР) локальных рассеивающих центров при многочастотном импульсном зондировании, включающий излучение импульсов с изменением несущей частоты ƒ от импульса к импульсу с шагом Δƒ в полосе частот ΔF, измерение частоты ƒ(tnm) зондирующих импульсов в моменты времени tnm, где n - номер шага перестройки частоты, m - номер повторного цикла перестройки, измерение в земной системе отсчета в моменты времени tnm координат центра антенны РЛС и координат выбранного центра синтезирования на объекте, измерение относительно земной системы отсчета угла наблюдения ψ(tnm) связанной с объектом системы отсчета с началом в центре синтезирования, прием отраженных сигналов, измерение комплексных огибающих  отраженных сигналов, корректировку фазы измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования, запоминание измеренных комплексных огибающих отраженных сигналов в течение времени синтезирования в угловом секторе, образование двумерной матрицы комплексных огибающих в координатах пространственных частот:
отраженных сигналов, корректировку фазы измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования, запоминание измеренных комплексных огибающих отраженных сигналов в течение времени синтезирования в угловом секторе, образование двумерной матрицы комплексных огибающих в координатах пространственных частот: 
и преобразование ее с помощью быстрого двумерного преобразования Фурье в двумерную матрицу синтезированных откликов. Определяют размер половины сектора углов наблюдения Δψ исходя из соотношения:
где  ;
;
ƒcp - средняя частота в полосе перестройки,
запоминают измеренные комплексные огибающие отраженных сигналов в секторе углов наблюдения ±Δψ, заносят в элементы с номерами (n1, m1) двумерной матрицы комплексных огибающих значения, полученные для номера n2 шага перестройки частоты и номера m2 повторного цикла перестройки, где:
с - скорость света;
n1=l, …, N1;
m1=1, …, М1;
Ν1=Lz (maxƒz-minƒz);
Μ1=Lx (maxƒx-minƒx);
Lz, Lx - размеры области синтезирования радиолокационного изображения по продольной z и поперечной x координатам;
Данный способ синтезирования двумерных РЛИ обеспечивает повышение разрешающей способности РЛИ и точности оценок ЭПР рассеивающих центров (РЦ) при расширении сектора углов поворота объекта относительно линии визирования, что достигается за счет формирования матрицы комплексных огибающих в координатах пространственных частот. Поскольку значения пространственных частот и координат РЦ в записи фазы комплексных огибающих связаны линейным образом, то в результате преобразования Фурье отраженный сигнал, определенный в области пространственных частот, преобразуется в область декартовых координат без искажения при увеличении полосы частот и сектора углов поворота.
Описанный способ взят в качестве прототипа.
Существенным недостатком способа-прототипа является то, что расстояние от центра антенны РЛС до точки синтезирования является априорно известным параметром, и корректировка фазы измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования, т.е. до центра вращения объекта выполняется точно.
На практике фазовые набеги измеренных комплексных огибающих определяются не только расстоянием от центра антенны РЛС до точки синтезирования, но и фазовыми задержками сигнала в волноводных устройствах, устройствах формирования, преобразования и фильтрации сигналов, следовательно, расстояние от эквивалентного фазового центра антенны до точки синтезирования (центра вращения объекта) не может быть точно определено только геометрическими измерениями.
В результате указанного недостатка изображение расфокусируется и в целом способ не обеспечивает достижения потенциальной разрешающей способности.
Предлагается способ, позволяющий избежать указанного недостатка.
Предлагаемый способ решает задачу получения двумерного РЛИ объекта с достижимой для заданной полосы частот разрешающей способностью с итерационным уточнением эквивалентного расстояния от условного фазового центра РЛС до точки синтезирования, обеспечивая пошаговое улучшение фокусировки РЛИ вплоть до достижения потенциальной разрешающей способности.
Для решения указанной задачи предлагается способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования, включающий излучение импульсов с изменением несущей частоты ƒ от импульса к импульсу с шагом Δƒ в полосе частот ΔF, измерение частоты ƒ(tnm) зондирующих импульсов в моменты времени tnm, где n - номер шага перестройки частоты, m - номер повторного цикла перестройки, измерение в земной системе отсчета в моменты времени tnm координат центра антенны радиолокационной системы и координат выбранного центра синтезирования на объекте, измерение относительно земной системы отсчета угла наблюдения ψ(tnm) связанной с объектом системы отсчета с началом в центре синтезирования, прием отраженных сигналов, измерение комплексных огибающих  отраженных сигналов, корректировку фазы измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования, запоминание измеренных комплексных огибающих отраженных сигналов в течение времени синтезирования в угловом секторе, образование двумерной матрицы комплексных огибающих в координатах пространственных частот:
отраженных сигналов, корректировку фазы измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования, запоминание измеренных комплексных огибающих отраженных сигналов в течение времени синтезирования в угловом секторе, образование двумерной матрицы комплексных огибающих в координатах пространственных частот:
и преобразование ее с помощью быстрого двумерного преобразования Фурье в двумерную матрицу синтезированных откликов, определяют размер половины сектора углов наблюдения Δψ исходя из соотношения:
где  ;
;
ƒср - средняя частота в полосе перестройки,
запоминают измеренные комплексные огибающие отраженных сигналов в секторе углов наблюдения ±Δψ, заносят в элементы с номерами (n1, m1) двумерной матрицы комплексных огибающих значения, полученные для номера n2 шага перестройки частоты и номера m2 повторного цикла перестройки, где:

с - скорость света;
n1=l, …, N1;
m1=1, …, М1
Ν1=Lz (maxƒz-minƒz);
Μ1=Lx (maxƒx-minƒx);
Lz, Lx - размеры области синтезирования радиолокационного изображения по продольной z и поперечной x координатам;

Согласно изобретению выбирается начальный размер области неопределенности по продольной координате Lнеопр=Lz, где Lz - размер области синтезирования РЛИ по продольной координате, выбирается начальное приближение R0=0 расстояния от эквивалентного фазового центра антенны до точки синтезирования, выполняется инициализация Ri=R0-Lнеопр/2+i×Lнеопр/Ν, 0≤i≤N-l набора расстояний от эквивалентного фазового центра антенны до точки синтезирования, где N - количество интервалов разбиения, для каждого значения расстояния Ri выполняется корректировка фаз измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования и построение двумерного РЛИ Рi, для каждого РЛИ Pi выполняется вычисление энтропии Е(Рi):

где
 - элемент матрицы нормированного двумерного РЛИ;
- элемент матрицы нормированного двумерного РЛИ;
P'i[m, k] - элемент матрицы Pi двумерного РЛИ;
М, K - размеры двумерного РЛИ.
Для вычисленного набора энтропий E(Pi) отыскивается минимальная энтропия Еmin(Рimin) и ее порядковый номер в наборе imin, по порядковому номеру imin уточняется расстояние от эквивалентного фазового центра антенны до точки синтезирования R0=Rimin, уменьшается в N раз размер области неопределенности по продольной координате Lнеопр=Lнеопр/Ν, где N - количество интервалов разбиения области неопределенности по продольной координате, далее цикл повторяется, начиная с инициализации набора расстояний Ri.
Выход из итерационного цикла осуществляется путем сравнения разности значений минимальных энтропий на текущей и предыдущей итерации с порогом:

где Ejmin - значение минимума энтропии на текущей итерации j;
Ej-1min - значение минимума энтропии на предыдущей итерации j-1;
ε - выбранное значение порога.
Достигаемый технический результат заключается в итерационном улучшении фокусировки РЛИ и уменьшении энтропии РЛИ вплоть до достижения потенциальной разрешающей способности путем последовательного уточнения расстояния от эквивалентного фазового центра антенны до точки синтезирования.
Сравнительный анализ способа-прототипа и предлагаемого способа показывает, что введены новые операции: выбор начального размера области неопределенности по продольной координате, выбор начального приближения расстояния от эквивалентного фазового центра антенны до точки синтезирования, инициализация набора расстояний от эквивалентного фазового центра антенны до точки синтезирования, вычисление элементов набора РЛИ для соответствующих элементов набора расстояний от эквивалентного фазового центра антенны до точки синтезирования, вычисление энтропии для каждого РЛИ, для вычисленного набора энтропий поиск минимальной энтропии и ее порядкового номера в наборе, по порядковому номеру уточнение расстояния от эквивалентного фазового центра антенны до точки синтезирования, уменьшение в N раз размера области неопределенности по продольной координате, где N - количество интервалов разбиения области неопределенности по продольной координате, повторение цикла, начиная с инициализации набора расстояний, выход из итерационного цикла путем сравнения разности значений минимальных энтропий на текущей и предыдущей итерации с порогом,
которые позволяют итерационно улучшать фокусировку и разрешающую способность РЛИ по сравнению со способом-прототипом вплоть до достижения потенциальной разрешающей способности.
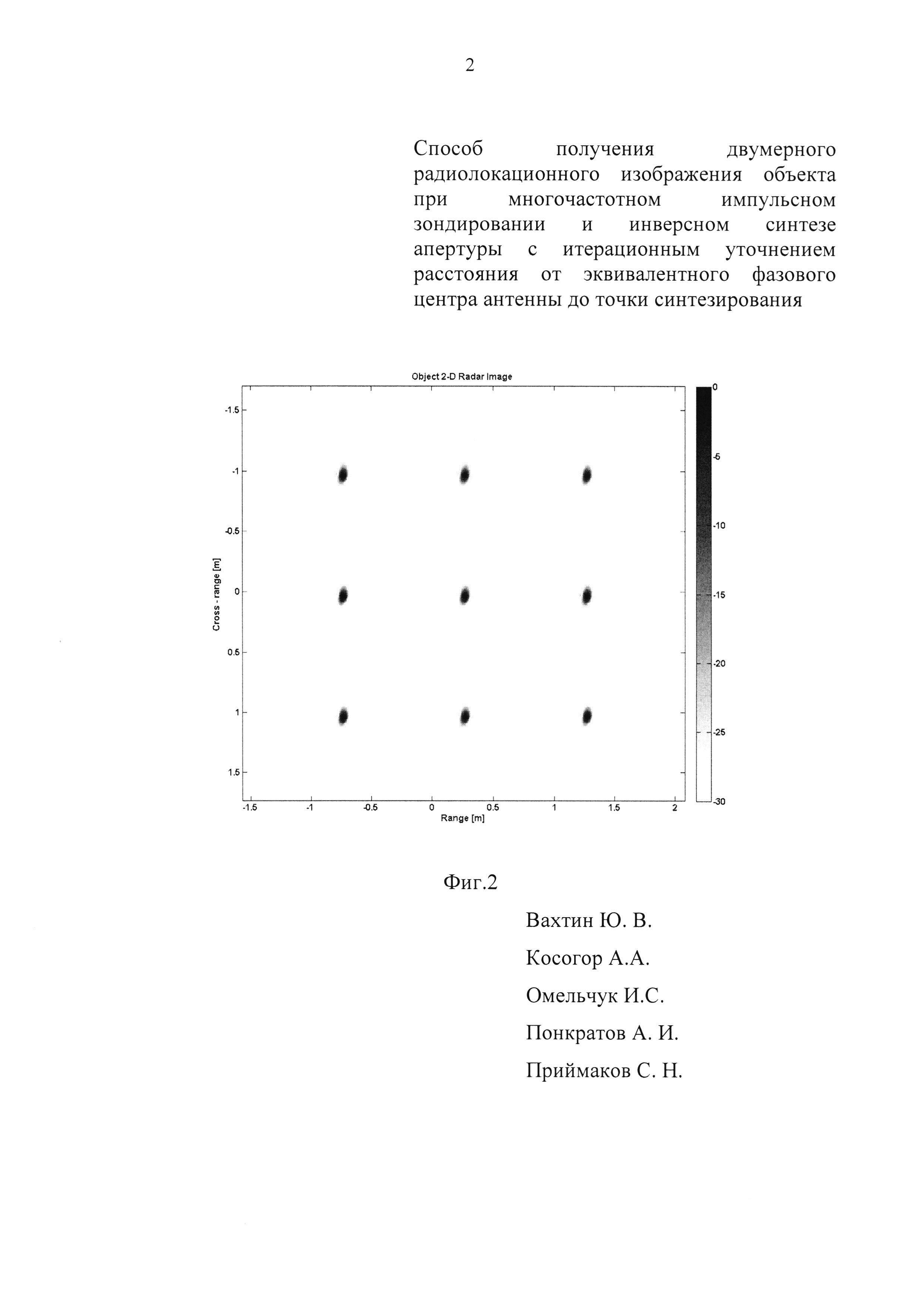
На фигуре 1 показано РЛИ модели исследуемого объекта, полученное после первой итерации предлагаемым способом, на фигуре 2 - после второй итерации, на фигуре 3 - после третьей итерации.
При реализации предлагаемого способа выполняются следующая последовательность операций:
- выбор начального размера области неопределенности по продольной координате Lнеопр=Lz, где Lz - размер области синтезирования РЛИ по продольной координате - 1,
- выбор начального приближения R0=0 расстояния от эквивалентного фазового центра антенны до точки синтезирования - 2,
- инициализация Ri=R0-Lнеопр/2+i×Lнеопр/Ν, 0≤i≤N-l набора расстояний от эквивалентного фазового центра антенны до точки синтезирования, где N - количество интервалов разбиения - 3,
- для каждого значения расстояния Ri корректировка фаз измеренных комплексных огибающих отраженных сигналов к расстоянию от центра антенны РЛС до точки синтезирования и построение двумерного РЛИ Pi в соответствии с прототипом - 4,
- вычисление энтропии E(Ρi) для каждого РЛИ Pi:

где
 - элемент матрицы нормированного двумерного РЛИ;
- элемент матрицы нормированного двумерного РЛИ;
P'i [m, k] - элемент матрицы Pi двумерного РЛИ;
M, K - размеры двумерного РЛИ - 5,
- для вычисленного набора энтропий E(Pi) поиск минимальной энтропии Emin(Pimin) и ее порядкового номера в наборе imin - 6,
- по порядковому номеру imin уточнение расстояния от эквивалентного фазового центра антенны до точки синтезирования R0=Rimin-7,
- уменьшение в N раз размера области неопределенности по продольной координате Lнеопр=Lнеопр/Ν, где Ν - количество интервалов разбиения области неопределенности по продольной координате - 8,
- повторение цикла, начиная с инициализации набора расстояний Ri (операция 3), - 9,
- выход из итерационного цикла осуществляется путем сравнения разности значений минимальных энтропий на текущей и предыдущей итерации с порогом:

где Ejmin - значение минимума энтропии на текущей итерации j;
Ej-1min - значение минимума энтропии на предыдущей итерации j-1;
ε - выбранное значение порога - 10.
Работоспособность предлагаемого способа проверена методом математического моделирования.
Условия локации при моделировании заданы следующим образом:
зондирующие сигналы РЛС - импульсы с периодом повторения 20 мкс, несущая частота сигнала меняется от импульса к импульсу с шагом 4500/1024 МГц в полосе частот от 12750 до 17250 МГц, объект равномерно вращается со скоростью 1.5°/c.
Модель объекта задана в виде совокупности неподвижных относительно связанной системы отсчета 9 РЦ, которые расположены в узлах квадратной сетки с удалением соседних РЦ по обеим координатам на 1 м.
Уровни эффективных площадей рассеяния (ЭПР) заданных РЦ выбраны одинаковыми и равными 1 м2.
Для заданной 30% перестройки частоты размер половины сектора углов синтезирования составляет примерно 10°.
На фиг. 1 приведено двумерное РЛИ объекта в плоскости локации, полученное после первой итерации предложенным способом в секторе углов наблюдения ±10° относительно ракурса синтезированного РЛИ. Значение минимума энтропии РЛИ E1min=8.26.
На фиг. 2 и 3 приведены двумерные РЛИ объекта после 2 и 3 итерации, значения минимумов энтропии равны соответственно E2min=7.1124 и E3min=6.5073.
Ошибки определения дальности от эквивалентного фазового центра антенны РЛС до точки синтезирования на первой, второй и третьей итерациях равны соответственно ΔR1=-1.05 м, ΔR2=0.31 м ΔR3=0.01 м.
Технический результат достигнут: устранены недостатки прототипа, обеспечено итерационное улучшение фокусировки и разрешающей способности РЛИ.












Способ пеленгования с повышенной разрешающей способностью
Модуль бесперебойного питания потребителей постоянного тока
Дренажно-предохранительный клапан
Космический аппарат дистанционного зондирования земли
Клапан для регулирования расхода горячего газа
Противопехотная осколочная мина дистанционной установки
Разъемное соединение
Газораспределительный клапан
Блок приема и синхронизации
Теплообменный аппарат
Способ пеленгования с повышенной разрешающей способностью
Модуль бесперебойного питания потребителей постоянного тока
Дренажно-предохранительный клапан
Космический аппарат дистанционного зондирования земли
Клапан для регулирования расхода горячего газа
Противопехотная осколочная мина дистанционной установки
Разъемное соединение
Газораспределительный клапан
Блок приема и синхронизации
Теплообменный аппарат

