Результат интеллектуальной деятельности: Система и способ для ведения автоматического очистительного устройства по траектории
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к автоматическому очистительному устройству, способному автономно перемещаться и производить очистку, и, более конкретно, к системе и способу для ведения этого автоматического очистительного устройства по некоторой траектории, например, траектории, ведущей к базовой станции (опорному пункту).
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
US 2005/0231156 раскрывает мобильную роботизированную систему, которая включает в себя зарядное устройство и мобильного робота. Это зарядное устройство снабжается излучателем света и набором первых зарядных контактов для подачи зарядного сигнала. Этот мобильный робот имеет первую сторону, снабженную первым датчиком света, вторую сторону, снабженную вторым датчиком света и набором вторых зарядных контактов, соответствующих этим первым зарядным контактам, перезаряжаемый блок аккумуляторной батареи и блок управления. Когда предполагается зарядка этого блока аккумуляторной батареи, этот блок управления обеспечивает возможность перемещения этого мобильного робота до тех пор, пока этот первый датчик света не детектирует свет, излучаемый этим излучателем света, затем обеспечивает возможность поворота этого мобильного робота до тех пор, пока этот второй датчик света не детектирует этот свет от этого излучателя света, и затем обеспечивает возможность перемещения этого мобильного робота в направлении этого зарядного устройства до тех пор, пока эти первые и вторые контакты не войдут в контакт.
US 2010/0324736 раскрывает роботизированную очистительную систему, включающую в себя стыковочную станцию для образования области стыковки в пределах заданного углового диапазона его передней стороны, для образования направляющих областей стыковки которые не перекрывают друг друга, на этих левой и правой сторонах этой области стыковки, и для передачи направляющего сигнала стыковки таким образом, чтобы эти направляющие области стыковки различались как первая направляющая область стыковки и вторая направляющая область стыковки согласно интервалу прибытия этого направляющего сигнала стыковки. Эта роботизированная очистительная система также включает в себя автоматическое очистительное устройство для перемещения его к этой стыковочной станции вдоль границы между этой первой направляющей областью стыковки и этой второй направляющей областью стыковки, когда этот направляющий сигнал стыковки обнаруживается, и для перемещения вдоль этой области стыковки, чтобы выполнить стыковку при достижении этой области стыковки.
JP 58176711 раскрывает грузовой автомобиль с датчиком управления направлением перемещения. Для обеспечения автоматического управления перемещением грузового автомобиля в заданном направлении, это управление основывается на результате детектирования этого фотодетектированного положения на фотодетекторной поверхности таким образом, чтобы этот световой луч принимался фотодетекторными элементами в стандартной последовательности. Лазерный свет проецируется из проектора, установленного в заданном положении на земле. Этот свет принимается этими фотодетекторными элементами, обеспеченными на этой передней части перемещаемого грузового автомобиля. Управление выполняется таким образом, чтобы получить опорную последовательность фотодетектирования на основе этого результата детектирования, показывающего эту область приема этих фотодетекторных элементов. Таким образом, этот грузовой автомобиль ведется вдоль этого света и, следовательно, автоматически управляется для перемещения в заданном направлении.
Роботизированные очистительные системы известны в данном уровне техники и обычно могут включать в себя автономно перемещающееся автоматического очистительное устройство с питанием от перезаряжаемой аккумуляторной батареи, и стационарную базовую станцию. Эта аккумуляторная батарея обеспечивает временную автономию этого робота, но требует периодического заряда на этой базовой станции. Этот робот и его базовая станция могут, следовательно, оснащаться средством, выполненным с возможностью обеспечения того, что это автоматическое очистительное устройство способно определять местоположение этой базовой станции и возвращаться к ней до того, как его аккумуляторная батарея разрядится.
Во многих известных роботизированных очистительных системах, таких как эта одна, описанная в US 7729803, используются стационарная базовая станция, оснащенная множеством передатчиков сигналов, и мобильное автоматическое очистительное устройство, оснащенное одним или несколькими датчиками для приема этих сигналов, переданных посредством этих передатчиков сигналов на этой базовой станции. Эти сигналы этих различных передатчиков сигналов могут отличаться по коду, и каждый из этих сигналов может передаваться от этой базовой станции в конкретном направлении, с возможностью приема в некоторой, обычно конусообразной области, продолжающейся от этой базовой станции. Таким образом, эти сигналы могут обеспечить возможность определения этим роботом его местоположения относительно этой базовой станции, и, в частности, его присутствие в некоторой области, на основе кодирования этих сигналов, которые он принимает.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Недостатком систем наведения на основе кода области является то, что чем дальше этот робот находится от его базовой станции, тем менее точным становится это определение его относительного местоположения. Поскольку эти конусообразные области сужаются в направлении этой базовой станции, эта точность позиционирования улучшается, когда этот робот приближается к этой базовой станции. До этих самых последних моментов процесса стыковки, однако, эта точность позиционирования может быть недостаточна для обеспечения выполнения этим роботом точного, прямого приближения, которое, например, обеспечивает то, что его соединительные клеммы подключаются к соответствующим зарядным клеммам на этой базовой станции. На самом деле, может оказаться, что этот робот качается в направлении этой базовой станции, поскольку он пытается продвигаться, одновременно сохраняя свое положение в пределах этой сужающейся конусообразной области, что может выглядеть скорее неуклюжим, чем интеллектуальным.
Объектом данного изобретения является обеспечение системы и способа, которые обеспечивают возможность ведения робота ровно вдоль четко определенной траектории, такой как траектория, ведущая к базовой станции. Данное изобретение определяется посредством независимых пунктов формулы изобретения.
С этой целью, первый аспект данного изобретения относится к системе. Эта система может содержать базовую станцию, включающую в себя передатчик, выполненный с возможностью передачи направляющего сигнала в пространственно ограниченную область приема направляющего сигнала. Эта система может также содержать мобильного робота. Этот робот может включать в себя приводную систему, выполненную с возможностью перемещать этого робота по полу; два расположенных по соседству друг от друга датчика направляющего сигнала, каждый из которых выполнен с возможностью генерации опорного сигнала, который отражает прием этим датчиком направляющего сигнала; и контроллер, который оперативно подключается к этой приводной системе и этим датчикам направляющего сигнала. Этот контроллер может быть выполнен с возможностью управления этой приводной системой для перемещения этого робота вдоль граничного участка этой области приема направляющего сигнала, в то же время поддерживая, на основе указанных опорных сигналов, состояние отслеживания, в котором первый из указанных датчиков направляющего сигнала позиционируется по существу на первой стороне указанного граничного участка, по существу внутри этой области приема направляющего сигнала, а второй из указанных датчиков направляющего сигнала позиционируется по существу на второй стороне указанного граничного участка, по существу за пределами этой области приема направляющего сигнала.
В данном изобретении этот передатчик может передавать направляющий сигнал в область приема направляющего сигнала, т.е. область пространства, в пределах которой этот направляющий сигнал может приниматься, и которая ограничивается по меньшей мере одной, обычно нефизической границей. На одной стороне этой границы, в пределах этой области приема направляющего сигнала, прием этого направляющего сигнала возможен, тогда как на другой стороне этой границы, за пределами этой области приема направляющего сигнала, никакой направляющий сигнал не может детектироваться. Эта граница сама может определить по меньшей мере один относительно отчетливый, т.е. пространственно узкий, граничный участок, который может рассматриваться в качестве направляющей траектории или пути, по которому должен следовать этот мобильный робот. Чтобы быть в состоянии следовать этой направляющей траектории, этот робот может оснащаться двумя расположенными по соседству друг от друга датчиками направляющего сигнала, каждый из которых способен детектировать этот направляющий сигнал и выводить опорный сигнал, который указывает на интенсивность этого детектированного направляющего сигнала. Существенная разница в этих уровнях этих опорных сигналов может указывать на то, что эти датчики направляющего сигнала расположены по существу на противоположных сторонах этого граничного участка, и, таким образом, что этот робот позиционируется на этой направляющей траектории, обеспеченной посредством этого передатчика. Это состояние, в котором эти датчики располагаются на противоположных сторонах этого граничного участка, может быть названо «состояние отслеживания», и это состояние отслеживания может поддерживаться, когда этот робот перемещается вдоль, и, таким образом, отслеживает, эту направляющую траекторию. В частности, когда эта направляющая траектория выбирается немного замысловатой (нереальной), приведенный выше подход может позволить этому роботу точно отслеживать ее в ровном, на вид интеллектуальном перемещении.
Согласно данному изобретению, этот передатчик выполнен с возможностью проецирования этого направляющего сигнала на этот пол. Такой вариант осуществления основывается на этом направляющем сигнале, подлежащем отражению от этого пола, чтобы он мог детектироваться и отслеживаться этим роботом. Таким образом, это отражение этого направляющего сигнала от этого пола, скорее чем этот направляющий сигнал, падающий на этот пол, определяет эту область приема направляющего сигнала, которая, в плоскости, параллельной полу, на высоте отслеживания этого робота, ограничивается посредством граничного участка, подлежащего отслеживанию. Эти датчики направляющего сигнала могут быть «десенсибилизированы» к этому направляющему сигналу, падающему на этот пол, посредством направления их лицевой частью к этому полу таким образом, чтобы только этот отраженный направляющий сигнал мог детектироваться. Преимуществом такого варианта осуществления является то, что он обеспечивает возможность определения непрямой или изогнутой направляющей траектории.
Этот направляющий сигнал может, в принципе, быть сигналом любого типа, способным быть переданным для обеспечения области приема направляющего сигнала, которая ограничивается по меньшей мере одним граничным участком, через который интенсивность этого направляющего сигнала уменьшается достаточно быстро для точного определения узкой и легко детектируемой направляющей траектории. Подходящие типы направляющего сигнала могут включать в себя акустические сигналы, например, ультразвуковые сигналы, и электромагнитные сигналы, в частности, невидимые световые сигналы, такие как ультрафиолетовые световые сигналы или инфракрасные световые сигналы. В одном (некотором) варианте осуществления этой системы, использующей инфракрасный свет, например, этот передатчик может включать в себя излучатель инфракрасного света, выполненный с возможностью излучения инфракрасного направляющего сигнала, тогда как каждый из этих датчиков направляющего сигнала может включать в себя приемник инфракрасного света, чувствительный к этому инфракрасному направляющему сигналу от этого излучателя инфракрасного света. Варианты осуществления этой раскрываемой системы на основе электромагнитных направляющих сигналов, и особенно инфракрасных направляющих сигналов, позволяют отчетливо определить области приема направляющего сигнала и, таким образом, точно определить направляющие траектории при относительно низких затратах на осуществление.
При условии эксплуатации этого робота на полу, эти датчики направляющего сигнала могут быть расположены, предпочтительно, на общей высоте отслеживания над этим полом; в случае, если эти датчики направляющего сигнала расположены не на одинаковой или общей высоте, то эта высота отслеживания может быть определена как средняя высота этих датчиков направляющего сигнала. Таким образом, этот робот может быть выполнен с возможностью отслеживания граничного участка этой области приема направляющего сигнала на указанной высоте отслеживания (т.е. этот граничный участок может совпадать с кривой пересечения между этой областью приема направляющего сигнала и плоскостью, параллельной полу, на этой высоте отслеживания). Во время отслеживания, этот робот может пытаться поддерживать это состояние отслеживания, в котором один из этих датчиков направляющего сигнала позиционируется по существу на первой стороне указанного граничного участка, внутри этой области приема направляющего сигнала, а другие датчики направляющего сигнала позиционируются по существу на второй стороне указанного граничного участка, за пределами этой области приема направляющего сигнала. Этот интервал между этими датчиками направляющего сигнала может, таким образом, быть приблизительно равным ширине этого граничного участка на этой высоте отслеживания, чтобы обеспечить как оптимальный контраст в этой интенсивности этого направляющего сигнала, детектированного этими двумя датчиками направляющего сигнала, так и точное и ровное его отслеживание. Следует понимать, что интервал между датчиками направляющего сигнала, который не является адаптированным к этой ширине этого граничного участка, может препятствовать правильному отслеживанию. Интервал между датчиками направляющего сигнала, который существенно меньше, чем эта ширина этого граничного участка, например, может препятствовать этому роботу обеспечивать это состояние отслеживания, в то время как интервал, который существенно превышает эту ширину этого граничного участка, может препятствовать точному отслеживанию, поскольку он может позволить этому роботу сбиться с направляющей траектории без покидания этого состояния отслеживания. В этом отношении, эта ширина этого граничного участка может толковаться как равная (минимальному) расстоянию, на котором эта интенсивность направляющего сигнала падает по меньшей мере на 75%, а предпочтительно даже от полного значения до нуля. В предпочтительном варианте осуществления, этот передатчик может быть выполнен с возможностью обеспечения того, что этот по меньшей мере один граничный участок, подлежащий отслеживанию посредством этого робота, имеет ширину, меньшую, чем 10 мм, а предпочтительно меньшую, чем 5 мм.
Форма этой области приема направляющего сигнала, и, следовательно, форма этого граничного участка, подлежащего отслеживанию, могут определяться этим передатчиком и изменяться для различных вариантов осуществления. Некоторые варианты осуществления могут даже включать в себя передатчик, который выполнен с возможностью изменения этой формы и/или местоположения этой области приема направляющего сигнала со временем.
В одном (некотором) относительно простом варианте осуществления, например, этот передатчик может быть выполнен с возможностью передачи этого направляющего сигнала в неподвижную, в форме луча, область приема направляющего сигнала, которая продолжается над этим полом. В плоскости, параллельной полу, на этой высоте отслеживания, этот луч может предпочтительно определить по меньшей мере один прямой граничный участок. В одном (некотором) практическом варианте осуществления, эта область приема направляющего сигнала может быть, в общем, конусообразной, и, таким образом, иметь две прямые непараллельные границы, которые продолжаются от этого передатчика в указанной плоскости, параллельной полу, на этой высоте отслеживания.
В еще одном другом варианте осуществления, эта область приема направляющего сигнала может быть не неподвижной, а быть динамической, и, например, изменять местоположение (относительно этого обычно неподвижного положения этого передатчика) и/или форму со временем. Например, в одном таком варианте осуществления, этот передатчик может быть выполнен с возможностью обеспечения области приема направляющего сигнала, которая, при наблюдении в плоскости, параллельной полу, на этой высоте отслеживания этого робота, определяет по существу прямой граничный участок, который продолжается в некотором граничном направлении от этого передатчика, и в котором этот передатчик дополнительно выполнен с возможностью изменения этого граничного направления. Этот передатчик может, в частности, изменять это граничное направление медленно, после того как этот робот начнет отслеживание этого граничного участка, таким образом, чтобы этот робот мог быть виртуально «привязан» или «намотан» вдоль динамической направляющей траектории, определяемой этим передатчиком.
Эти и другие признаки и преимущества данного изобретения будут более полно поняты из следующего подробного описания некоторых вариантов осуществления данного изобретения, взятых вместе с сопутствующими чертежами, которые, как подразумевается, иллюстрируют и не ограничивают данное изобретение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
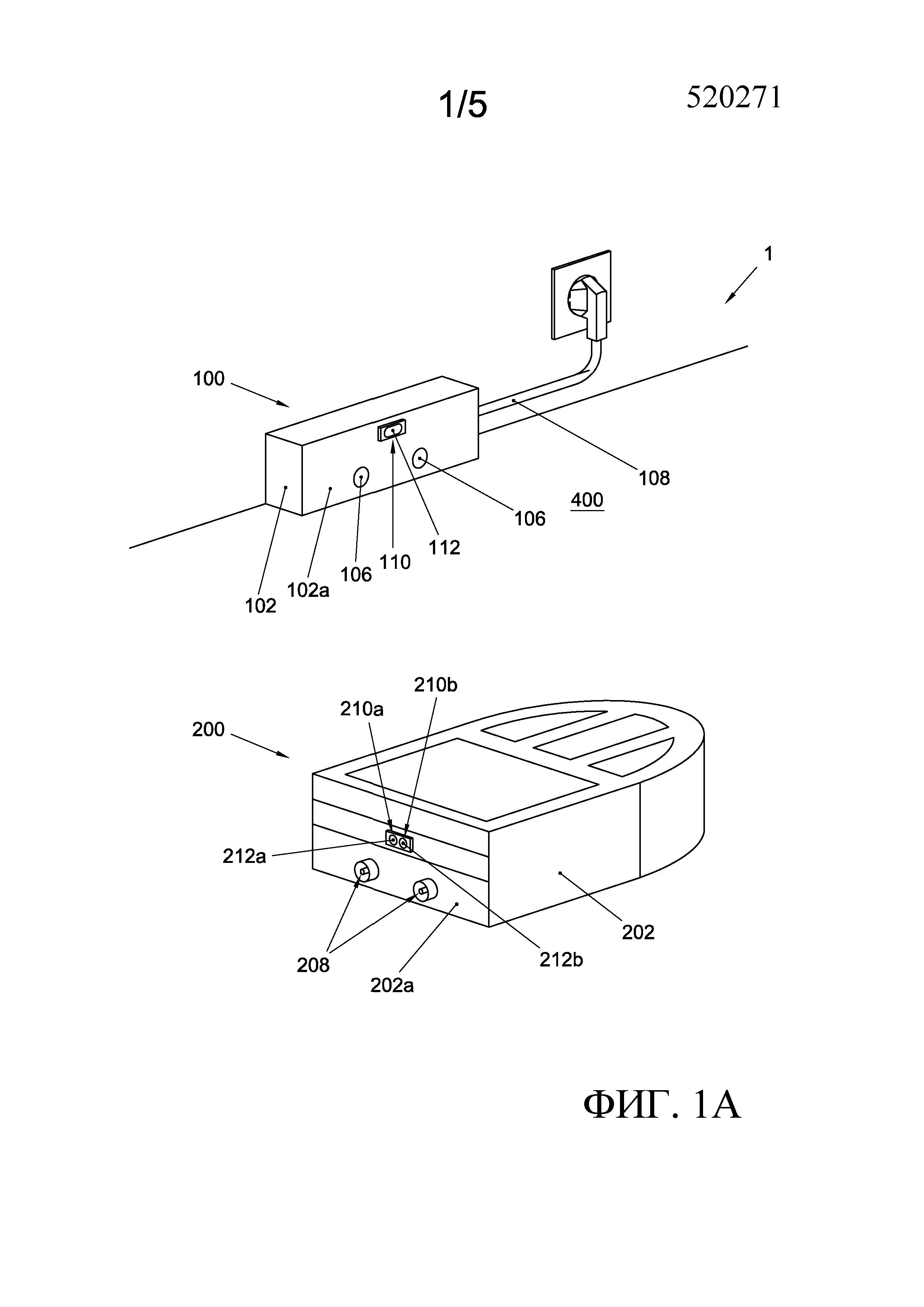
Фиг. 1А является схематичным видом иллюстративной системы согласно данному изобретению, включающей в себя базовую станцию и мобильного робота, способного стыковаться с ней;
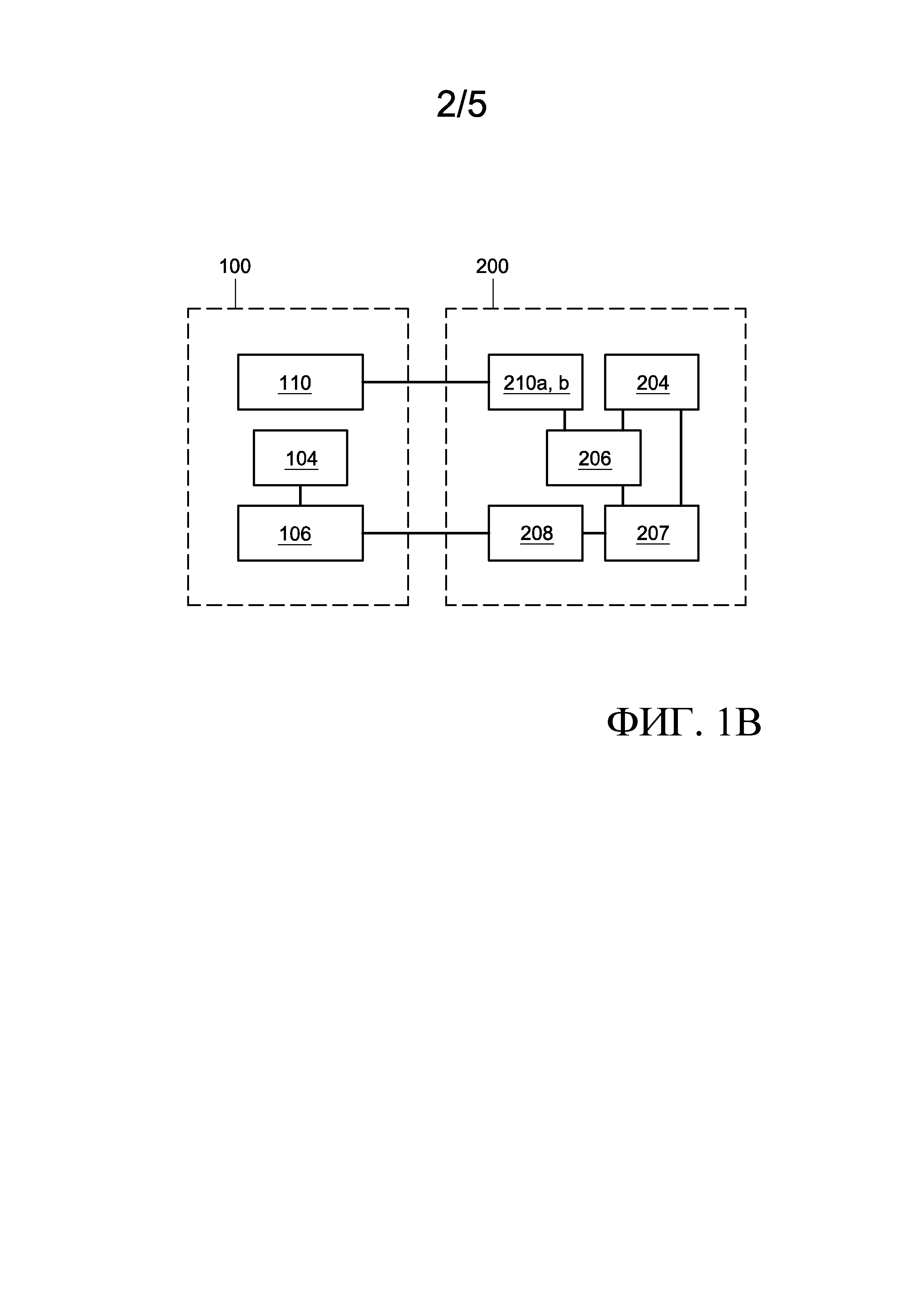
Фиг. 1В схематично иллюстрирует отношения между этими различными компонентами этой системы, показанной на фиг. 1А;
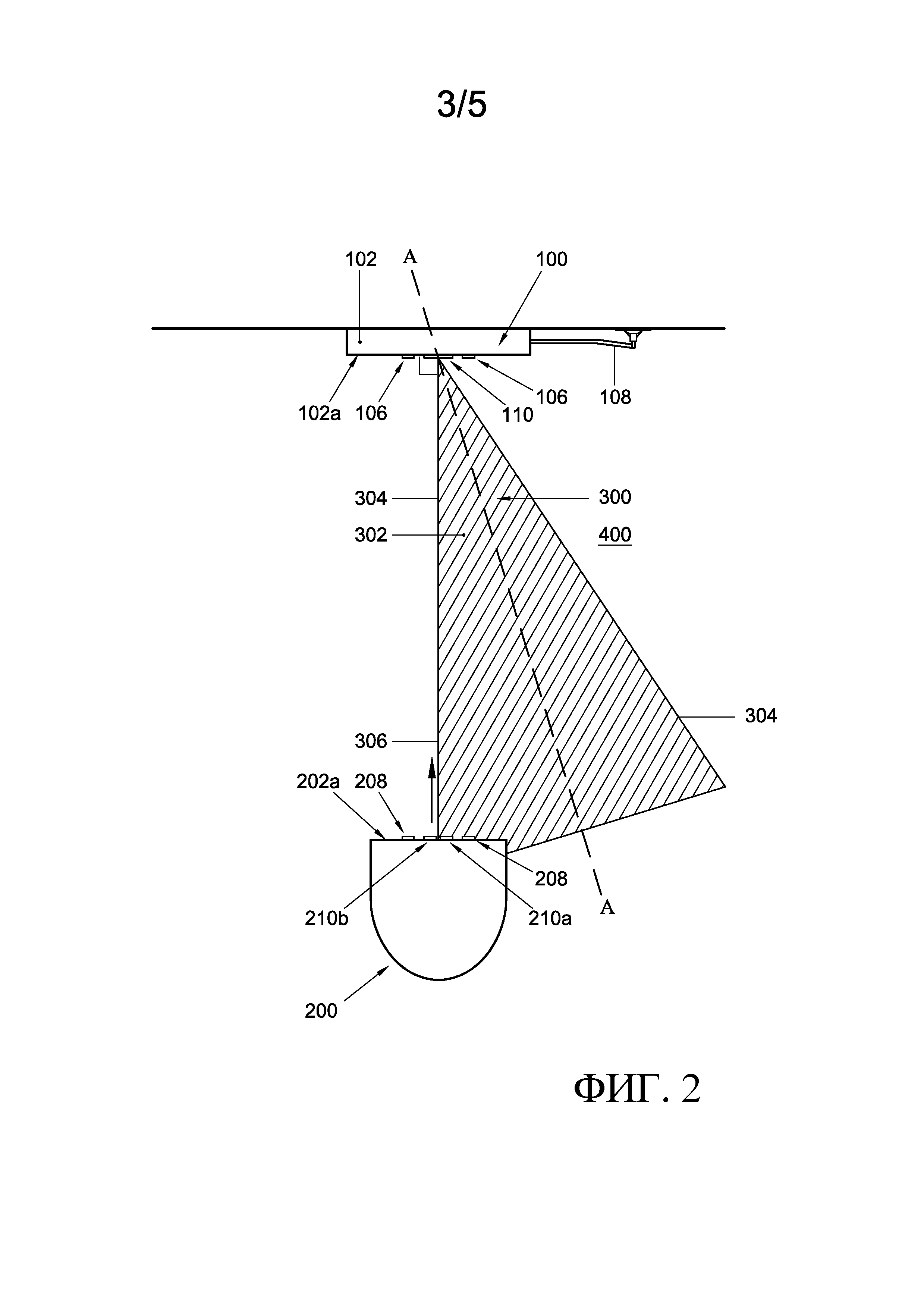
Фиг. 2 является схематичным видом сверху этой системы фиг. 1 во время функционирования, иллюстрирующим, как этот робот следует по прямому граничному участку, в общем, конусообразной области приема направляющего сигнала, генерируемой передатчиком этой базовой станции;
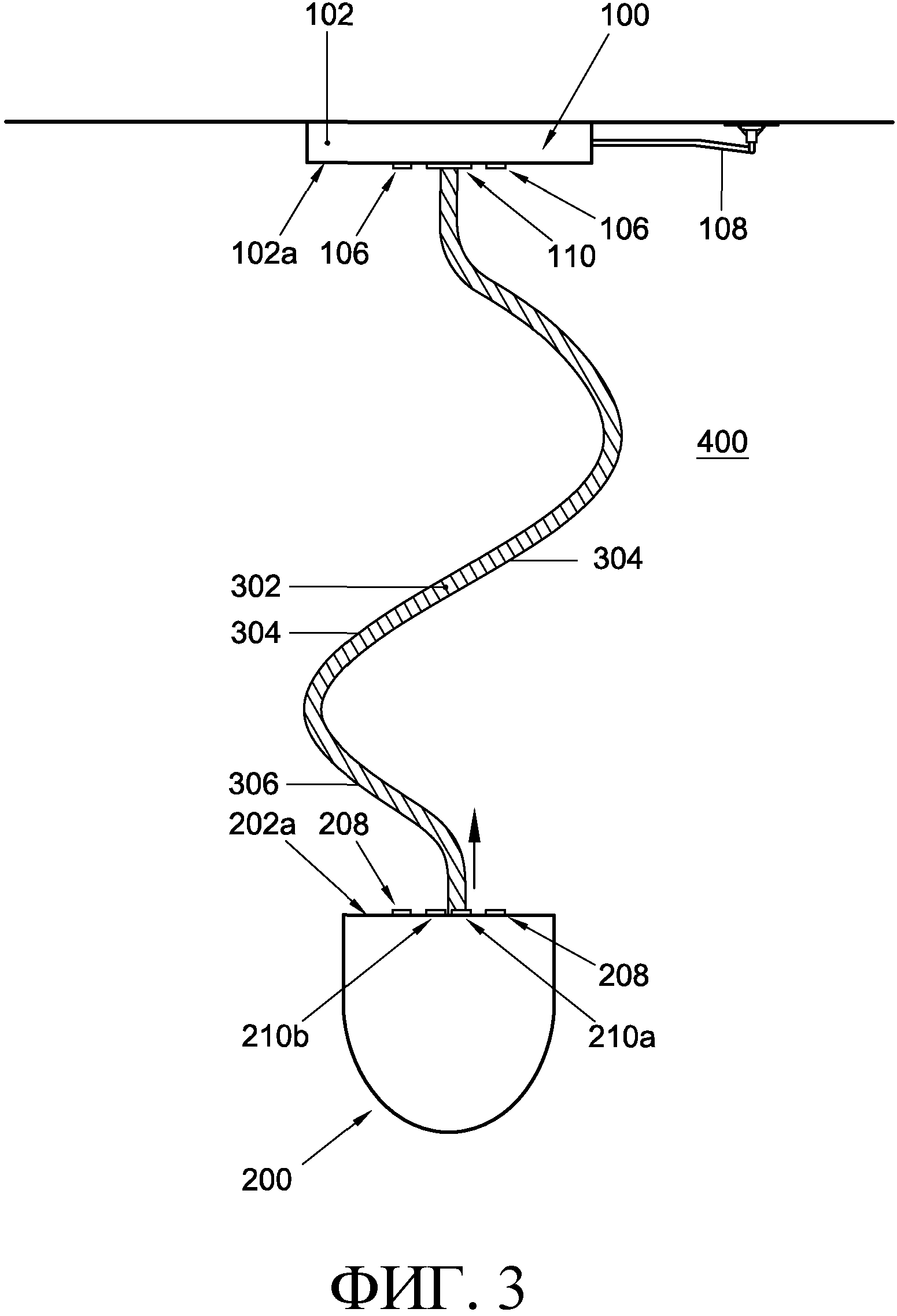
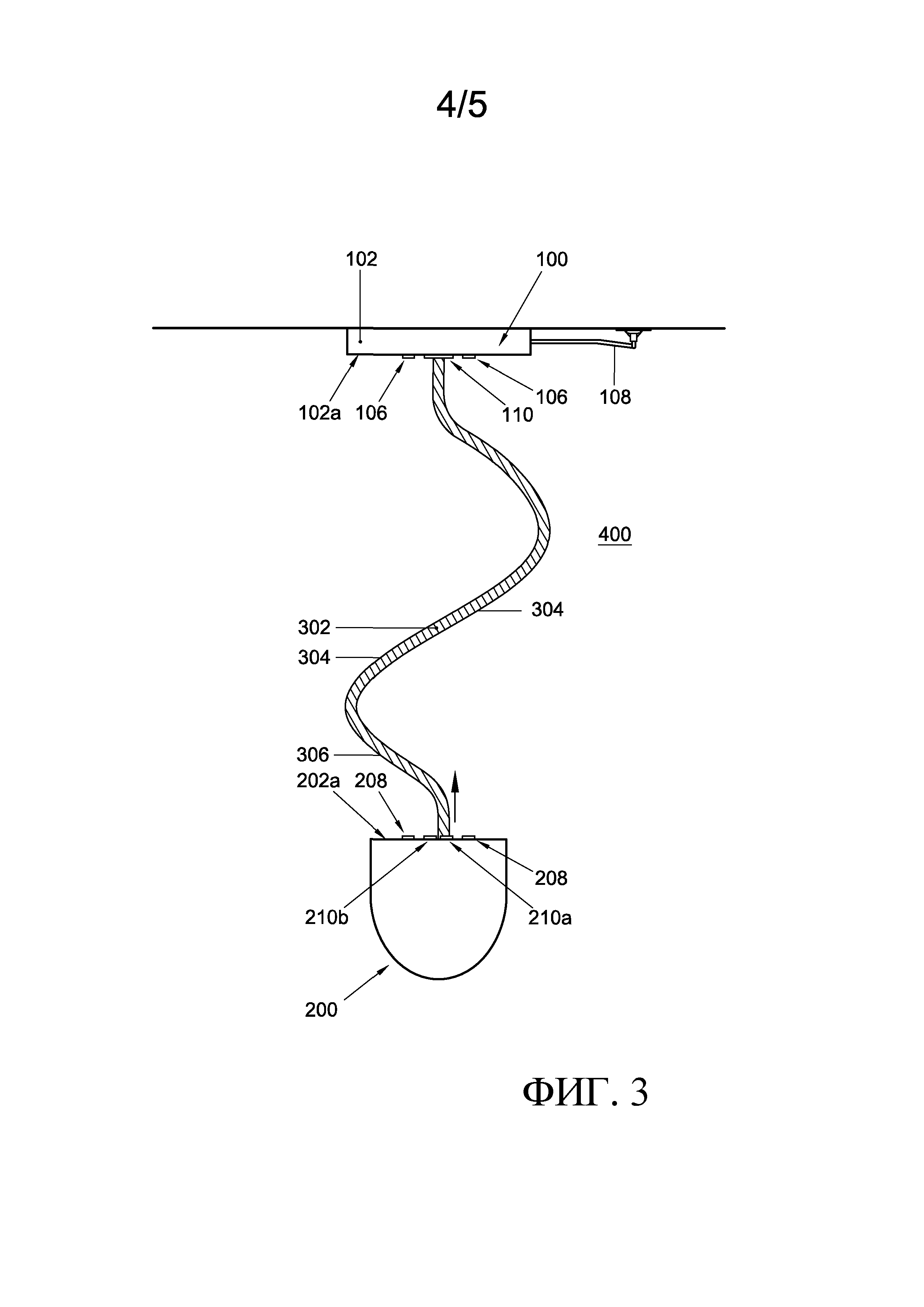
Фиг. 3 является схематичным видом сверху этой системы фиг. 1 во время функционирования, иллюстрирующим, как этот робот следует по изогнутому граничному участку области приема направляющего сигнала, генерируемой передатчиком этой базовой станции, который проецирует этот направляющий сигнал на этот пол;
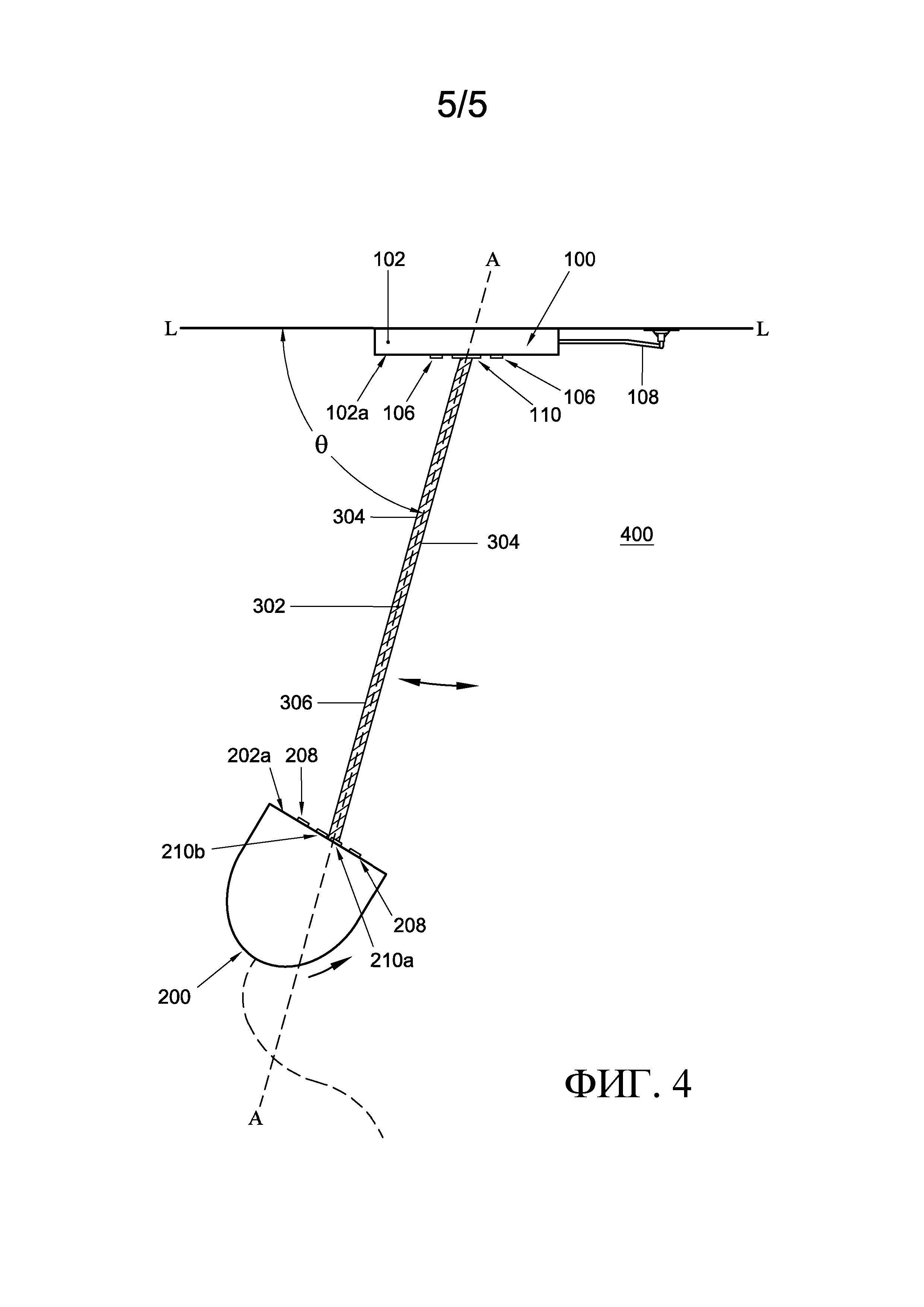
Фиг. 4 является схематичным видом сверху этой системы фиг. 1 во время функционирования, иллюстрирующим, как этот робот следует по динамическому или перемещающемуся граничному участку области приема направляющего сигнала, как если бы он был «привязан» к этой базовой станции, которая генерирует его.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг. 1А является схематичным видом иллюстративной системы 1 согласно данному изобретению, включающей в себя базовую станцию 100 и мобильного робота 200. Эта базовая станция 100 и этот мобильный робот 200 включают в себя различные компоненты, чьи взаимоотношения схематично показаны на фиг. 1В. Обратимся теперь, в частности, к фиг. 1А и 1В.
Эта базовая станция 100, с которой этот робот 200 может стыковаться, может включать в себя корпус 102. Этот корпус 102 может вмещать зарядное устройство 104, и передатчик 110. Это зарядное устройство 104 может включать в себя две зарядные клеммы 106, расположенные на обычно плоской передней стороне 102а этого корпуса 102, и подключенные к электрической сети через сетевой шнур 108 и внутренний трансформатор (не показан). В состыкованном состоянии этого робота 200, эти зарядные клеммы 106 могут подключаться к двум соответствующим соединительным клеммам 208 на этой фронтальной стороне 202а этого робота 200 для зарядки его внутренней перезаряжаемой аккумуляторной батареи 207.
Этот передатчик 110 может также позиционироваться на этой передней стороне 102а этого корпуса 102. В этом изображенном варианте осуществления, этот передатчик 110 включает в себя излучатель 112 инфракрасного света, например, инфракрасный лазерный диод или инфракрасный LED (светодиод), выполненный с возможностью излучения инфракрасного направляющего сигнала. Поскольку функционирование раскрываемой в настоящее время системы 1 не основывается на многочисленных передатчиках 110/излучателях 112 инфракрасного света, излучающих многочисленные направляющие сигналы, которые отличаются по коду (области), одного излучателя 112 инфракрасного света обычно может быть достаточно. В общем, этот передатчик 110 может быть выполнен с возможностью передачи направляющего сигнала 300 в область 302 приема направляющего сигнала, ограниченной границей 304, которая включает в себя по меньшей мере один пространственно узкий граничный участок 306, подлежащий отслеживанию этим роботом 200 (см. Фиг. 2-4). Этот граничный участок может предпочтительно иметь ширину меньше, чем 10 мм, причем в пределах этой ширины интенсивность этого направляющего сигнала может упасть по меньшей мере на 75%.
Как будет разъясняться со ссылкой на фиг. 2-4 ниже, форма области 302 приема направляющего сигнала, и, следовательно, форма этого граничного участка 306, подлежащего отслеживанию, может определяться этим передатчиком 110 и изменяться для различных вариантов осуществления. Некоторые варианты осуществления могут включать в себя передатчик 110, который выполнен с возможностью изменения этой формы и/или положения этой области приема направляющего сигнала со временем. Для обеспечения области 302 приема направляющего сигнала неподвижным или динамическим граничным участком 306, этот излучатель 112 инфракрасного света может обеспечивать проекционное средство, которое обеспечивает возможность ему подходящим образом проецировать этот направляющий сигнал в пространство, например, над этим полом или на него. Такое проекционное средство само может иметь обычную общепринятую конструкцию, и, например, включать в себя одну или несколько (инфракрасных) линз, зеркал и/или оптических масок, и, в частности, в случае одного (некоторого) варианта осуществления, характеризующегося динамической областью приема направляющего сигнала, один или несколько электромоторов для перемещения этих линз, зеркал и/или масок.
Этот робот 200 может включать в себя корпус 202, который может по меньшей мере частично вмещать приводную систему 204 - например, включающую в себя набор колес и электромотор – для перемещения этого робота по этому полу 400, два датчика 210а, 210b направляющего сигнала, контроллер 206, который является оперативно подключенным как к этой приводной системе 204, так и к этим датчикам 210а, 210b направляющего сигнала, и выполнен с возможностью управления этой приводной системой на основе опорных сигналов, выдаваемых этими датчиками направляющего сигнала, и перезаряжаемую аккумуляторную батарею 207, которая питает как эту приводную систему 204, так и этот контроллер 206. Эта аккумуляторная батарея 207 может оснащаться вышеупомянутыми двумя соединительными клеммами 208, которые могут быть расположены на обычно плоской передней стороне 202а этого корпуса 202 для подключения к этим зарядным клеммам 106 на этой базовой станции 100 в состыкованном состоянии этого робота 200. В варианте осуществления, в котором этот робот 200 является роботизированным пылесосом, он может дополнительно включать в себя (вакуумное) средство всасывания, щетки, которые могут двигаться вращательно, и внутренний пылесборник, которые, как будет понятно специалисту в данной области техники, являются хорошо известными признаками в данной области техники.
Эти датчики 210а, 210b направляющего сигнала могут быть расположены по соседству друг от друга на этой передней стороне 202а корпуса 202 этого робота, на общей высоте отслеживания над этим полом. Интервал между этими датчиками 210а, 210b направляющего сигнала может быть приблизительно равным ширине этого граничного участка 306 этой области 302 приема направляющего сигнала, подлежащему отслеживанию, и обычно быть меньше 10 мм. Понятно, что каждый из этих датчиков 210а, b направляющего сигнала может включать в себя приемник 212а, 212b инфракрасного света, который является чувствительным к этому инфракрасному направляющему сигналу от этого излучателя 112 инфракрасного света этой базовой станции 100.
Этот контроллер 206 этого робота 200 может включать в себя процессор, выполненный с возможностью выполнения программы перемещения или программы, включающей в себя команды для этой приводной системы 204, для перемещения этого робота 200 по этому полу 400 по некоторой схеме. Более конкретно, этот контроллер 206 может быть выполнен с возможностью управления этой приводной системой 204 по меньшей мере на основе этих опорных сигналов, выдаваемых этими датчиками 210а, 210b направляющего сигнала, и - в частности, когда детектируется низкий заряд аккумуляторной батареи и/или некоторая программа перемещения, например, программа очистки, завершена – вследствие этого, активного поиска, детектирования и следования по граничному участку 306 этой области 302 приема направляющего сигнала, обеспеченной этим передатчиком 110 этой базовой станции 100. Для определения местоположения этой области 302 приема направляющего сигнала, этот контроллер может, например, перемещать этот робот 200 произвольно по этому полу до тех пор, пока один или оба этих датчика 210а, 210b направляющего сигнала зарегистрируют этот направляющий сигнал 300. После определения местоположения этой области 302 приема направляющего сигнала, и, возможно, входа в нее, этот контроллер 206 может попытаться определить местоположение этого граничного участка 306, подлежащего отслеживанию, посредством произвольного перемещения в направлении границ этой области 302 приема направляющего сигнала (детектируемых через потерю приема направляющего сигнала по меньшей мере одним из этих датчиков 210а, 210b направляющего сигнала), и определения, может ли быть обеспечено состояние отслеживания на этой детектированной границе. В этой связи стоит отметить, что в вариантах осуществления фиг. 2-4, этот левый датчик 210b направляющего сигнала этого робота 200 (произвольно) выбирается в качестве этого одного, который, в этом состоянии отслеживания, позиционируется по существу на внешней стороне этого отслеживаемого граничного участка 306 этой области 302 приема направляющего сигнала, тогда как этот правый датчик 210а направляющего сигнала выбирается в качестве этого одного, который позиционируется на внутренней стороне этого отслеживаемого граничного участка 306. Таким образом, в случае, когда граница этой области 302 приема направляющего сигнала детектируется сначала через потерю приема направляющего сигнала для этого правого датчика 210а направляющего сигнала, этот контроллер 206 может заключить, что этот робот 200 находится на неправильной стороне этой области 302 приема направляющего сигнала, и переместить его к противоположной стороне, в направлении этого граничного участка 306, подлежащего отслеживанию. После определения местоположения этого граничного участка 306, подлежащего отслеживанию, этот контроллер 206 может инициировать программу следования по граничному участку, которая перемещает этого робота 200 вдоль этого граничного участка 306, одновременно поддерживая это состояние отслеживания, чтобы ровно перемещаться в направлении этой базовой станции.
Различные предполагаемые варианты осуществления этой системы 1 согласно данному изобретению будут теперь кратко описываться со ссылкой на фиг. 2-4, которые показывают эту систему 1 во время функционирования. Этот робот 200 показывается каждый раз отслеживающим граничный участок 306 этой области 302 приема направляющего сигнала, обеспеченного этим передатчиком 110 этой базовой станции 100.
В варианте осуществления фиг. 2, этот передатчик 110 на этой базовой станции 100 выполнен с возможностью передачи этого направляющего сигнала 300 в неподвижную, в форме луча, область 302 приема направляющего сигнала, которая продолжается над этим полом 400. Эта область 302 приема направляющего сигнала может быть, в общем, конусообразной. В плоскости, параллельной полу, на этой высоте отслеживания этого робота 200, эта область 302 приема направляющего сигнала может, таким образом, определить два прямых непараллельных граничных участка 304, которые сходятся в направлении этого передатчика 110. Из того факта, что это состояние отслеживания в этом изображенном варианте осуществления определяется как конфигурация, в которой эти левый и правый датчики 210а, 210b направляющего сигнала этого робота 200 позиционируются, соответственно, на этой внешней стороне и на этой внутренней стороне этого отслеживаемого граничного участка, следует то, что этот граничный участок 304, подлежащий отслеживанию, является тем, который обозначен 306.
Можно отметить, что этот передатчик 110 на этой базовой станции 100 был выполнен таким образом, чтобы этот граничный участок 306, подлежащий отслеживанию, продолжался по существу перпендикулярно этой обычно плоской передней стороне 102а этого корпуса 102 этой базовой станции 100. Таким образом, когда этот робот 200 отслеживает свой путь к этой базовой станции вдоль этого граничного участка 306, он может перемещаться на вид интеллектуально и, в общем, по прямой линии, до тех пор, пока, в конце концов, его собственная обычно плоская передняя сторона 202а точно не соединится с этой обычно плоской передней стороной 102а этого корпуса, и его соединительные клеммы 208 не подключатся к этим зарядным клеммам 106.
В варианте осуществления фиг. 3, этот передатчик 110 выполнен не с возможностью передачи этого направляющего сигнала 300 над этим полом 400, как показано на фиг. 2, а вместо этого с возможностью проецирования этого направляющего сигнала на этот пол 400. Такой вариант осуществления может основываться на этом направляющем сигнале 300, подлежащем отражению от этого пола 400, чтобы он мог детектироваться и отслеживаться этим роботом 200. Таким образом, это отражение этого направляющего сигнала от этого пола 400, скорее чем этот направляющий сигнал, падающий на этот пол, может определить эту область 302 приема направляющего сигнала, которая, в плоскости, параллельной полу, на высоте отслеживания этого робота 200, ограничивается граничным участком 306, подлежащим отслеживанию. Эти датчики 210а, 210b направляющего сигнала могут быть «десенсибилизированы» к этому направляющему сигналу, падающему на этот пол, посредством направления их лицевой частью к этому полу таким образом, чтобы только этот отраженный направляющий сигнал мог детектироваться. Преимуществом такого варианта осуществления является то, что он обеспечивает возможность определения непрямой или изогнутой направляющей траектории, такой как эта приблизительно синусоидальная направляющая траектория, показанная на фиг. 3.
В варианте осуществления фиг. 4, этот передатчик 110 выполнен с возможностью обеспечения динамической, т.е. изменяемой со временем, области 302 приема направляющего сигнала, в противоположность к этим неподвижным областям 302 приема направляющего сигнала, показанным на фиг. 2-3. В этой показанной ситуации, этот передатчик 110 обеспечивает узкую, в форме луча, область 302 приема направляющего сигнала, который продолжается над этим полом 400; в альтернативном варианте осуществления, однако, он может проецироваться на этот пол. Эта область 302 приема направляющего сигнала может иметь центральную ось А, которая, вместе с произвольной параллельной полу опорной линией L, может включать в себя угол θ. Показанный передатчик 110 может изменять это положение этой области 302 приема направляющего сигнала относительно этого передатчика 110 со временем посредством изменения этого направления, в котором он передает этот направляющий сигнал 300. А именно, этот передатчик 110 может быть выполнен с возможностью изменения со временем этого угла θ, под которым эта центральная ось А этой области 302 приема направляющего сигнала продолжается относительно этой опорной линии L. Следовательно, этот граничный участок 306, который отслеживается этим мобильным роботом 200, может продолжаться в изменяемом граничном направлении, и эффективно перемещаться через пространство. В случае, когда этот передатчик 110 изменяет это граничное направление медленно, и после того, как этот робот 200 начнет отслеживание этого граничного участка 306, эта область 302 приема направляющего сигнала может эффективно рассматриваться в качестве «тянущего луча», посредством которого этот робот 200 может быть намотан вдоль динамической направляющей траектории, определяемой этим передатчиком 110.
Хотя иллюстративные варианты осуществления данного изобретения были описаны выше, в части ссылки на сопутствующие чертежи, должно быть понятно, что данное изобретение не ограничивается этими вариантами осуществления. Вариации к этим описанным вариантам осуществления могут быть поняты и осуществлены специалистами в данной области техники при применении на практике заявленного изобретения, из изучения этих чертежей, этого описания и этой приложенной формулы изобретения. Ссылка по всей этой спецификации на «один вариант осуществления» или «некоторый вариант осуществления» означает, что конкретный признак, структура или характеристика, описанная в связи с этим вариантом осуществления, является включенной по меньшей мере в один вариант осуществления данного изобретения. Таким образом, появления этих фраз «в одном варианте осуществления» или «в некотором варианте осуществления» в различных местах по всей этой спецификации не обязательно все относятся к одному и тому же варианту осуществления. Кроме того, следует отметить, что конкретные признаки, структуры или характеристики одного или нескольких вариантов осуществления могут объединяться любым подходящим способом для образования новых, явным образом не описанных вариантов осуществления.
Список элементов
|
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия
Вытяжная решетка
Устройство для использования в блендере
Передача длины элемента кадра при кодировании аудио
Волновод
Широкополосная магнитно-резонансная спектроскопия в сильном статическом (b) магнитном поле с использованием переноса поляризации
Магнитный резонанс, использующий квазинепрерывное рч излучение
Устройство для очистки газа
Кодер аудио и декодер, имеющий гибкие функциональные возможности конфигурации
Магнитно-резонансная спектроскопия с автоматической коррекцией фазы и в0 с использованием перемеженного эталонного сканирования воды
Матрица vcsel с повышенным коэффициентом полезного действия

