Результат интеллектуальной деятельности: СПОСОБ БЕСШУМНОЙ РАБОТЫ, И ОБОРУДОВАНИЕ УСТРОЙСТВА АВТОМАТИЧЕСКОЙ ОЧИСТКИ, И ЭЛЕКТРОННОЕ УСТРОЙСТВО
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА СООТВЕТСТВУЮЩИЕ ЗАЯВКИ
[0001] Настоящая заявка основана на и заявляет о приоритете по китайской заявке на патент №201410729768.2, поданной 3 декабря 2014 г., полное содержание которой включено сюда посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Настоящее изобретение относится к области автоматической очистки, и, более конкретно, к бесшумному способу работы автоматического устройства очистки, оборудованию бесшумной работы автоматического устройства очистки и электронному устройству.
УРОВЕНЬ ТЕХНИКИ
[0003] С развитием технологии появляются различные автоматические устройства очистки, такие как автоматический робот-подметальщик, автоматический робот-полотер и т.д. Автоматические устройства очистки могут выполнять работу по очистке автоматически, что удобно для пользователя. Если взять в качестве примера автоматического робота-подметальщика, территория очищается автоматически с помощью технологии, например, прямой очистки щеткой, вакуумной очистки и т.д.
[0004] Однако автоматические устройства очистки могут создавать большой шум во время работы, влияя, таким образом, на нормальную жизнь пользователя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Настоящее изобретение предлагает способ бесшумной работы автоматического устройства очистки, оборудование бесшумной работы автоматического устройства очистки и электронное устройство для решения технической проблемы высокой шумности автоматического устройства очистки во время работы в предшествующем уровне техники.
[0006] Согласно первому аспекту вариантов осуществления настоящего изобретения, предусмотрен способ бесшумной работы автоматического устройства очистки, включающий в себя:
прием команды бесшумной работы;
планирование бесшумного маршрута, в соответствии с командой бесшумной работы;
переключение в бесшумный режим и выполнение операции очистки, в соответствии с бесшумным маршрутом.
[0007] Альтернативно, команда бесшумной работы вводится пользователем.
[0008] Альтернативно, способ бесшумной работы дополнительно включает в себя:
возвращение в нормальный режим из режима бесшумной работы при обнаружении отмены команды бесшумной работы от пользователя, в ином случае - продолжение работы в бесшумном режиме.
[0009] Альтернативно, прием команды бесшумной работы включает в себя: получение относительного расстояния по отношению к пользователю; выдача команды бесшумной работы, если относительное расстояние меньше или равно заданному расстоянию.
[0010] Альтернативно, прием команды бесшумной работы включает в себя:
получение информации о состоянии пользователя;
выдача команды бесшумной работы, если пользователь находится в заданном состоянии.
[0011] Альтернативно, переключение в бесшумный режим включает в себя:
снижение рабочей мощности автоматического устройства очистки до заданного значения.
[0012] Альтернативно, планирование бесшумного маршрута, в соответствии с командой бесшумной работы, включает в себя:
получение исходного маршрута;
создание бесшумного маршрута, согласно исходному маршруту, причем длина бесшумного маршрута превышает длину исходного маршрута.
[0013] Альтернативно, создание бесшумного маршрута, согласно исходному маршруту, включает в себя:
выполнение сочетания повторяющихся действий на заданном количестве исходных маршрутов для получения бесшумного маршрута; или
создание бесшумного маршрута, согласно интенсивности исходного маршрута, причем интенсивность бесшумного маршрута превышает интенсивность исходного маршрута.
[0014] Согласно второму аспекту вариантов осуществления настоящего изобретения, предусмотрено оборудование бесшумной работы автоматического устройства очистки, включающее в себя:
блок приема команды, сконфигурированный для приема команды бесшумной работы;
блок планирования маршрута, сконфигурированный для планирования бесшумного маршрута, согласно команде бесшумной работы;
блок переключения режима, сконфигурированный для переключения в бесшумный режим и выполнения операции очистки, в соответствии с бесшумным маршрутом.
[0015] Альтернативно, команда бесшумной работы вводится пользователем.
[0016] Альтернативно, оборудование бесшумной работы дополнительно включает в себя:
блок управления режимом, сконфигурированный для возвращения в нормальный режим из режима бесшумной работы при обнаружении отмены команды бесшумной работы от пользователя, в ином случае - для продолжения работы в бесшумном режиме.
[0017] Альтернативно, блок приема команды включает в себя:
подблок получения расстояния, сконфигурированный для получения относительного расстояния по отношению к пользователю;
первый подблок выдачи команды, сконфигурированный для выдачи команды бесшумной работы, если относительное расстояние меньше или равно заданному расстоянию.
[0018] Альтернативно, блок приема команды включает в себя:
подблок получения состояния, сконфигурированный для получения информации о состоянии пользователя;
второй подблок выдачи команды, сконфигурированный для выдачи команды бесшумной работы, если пользователь находится в заданном состоянии.
[0019] Альтернативно, блок переключения режима включает в себя:
подблок регулировки мощности, сконфигурированный для снижения рабочей мощности автоматического устройства очистки до заданного значения.
[0020] Альтернативно, блок планирования маршрута включает в себя:
подблок получения маршрута, сконфигурированный для получения исходного маршрута;
подблок создания маршрута, сконфигурированный для создания бесшумного маршрута, согласно исходному маршруту, причем длина бесшумного маршрута превышает длину исходного маршрута.
[0021] Альтернативно, подблок создания маршрута включает в себя: модуль сочетания или модуль создания, причем
модуль сочетания сконфигурирован для выполнения сочетания повторяющихся действий на заданном количестве исходных маршрутов для получения бесшумного маршрута;
модуль создания сконфигурирован для создания бесшумного маршрута, согласно интенсивности исходного маршрута, причем интенсивность бесшумного маршрута превышает интенсивность исходного маршрута.
[0022] Согласно третьему аспекту вариантов осуществления настоящего изобретения, предусмотрено электронное устройство, включающее в себя:
процессор;
память для хранения команд, исполняемых процессором;
причем процессор сконфигурирован для:
приема команды бесшумной работы;
планирования бесшумного маршрута, в соответствии с командой бесшумной работы;
переключения в бесшумный режим и выполнения операции очистки, в соответствии с бесшумным маршрутом.
[0023] Технические решения, описанные в вариантах осуществления настоящего изобретения, могут обладать следующими преимуществами.
[0024] С помощью технических решений настоящего изобретения, путем приема команды бесшумной работы и переключения в бесшумный режим, может быть снижена шумность во время работы, и может быть устранено воздействие на пользователя; кроме того, путем планирования бесшумного маршрута, применяемого в бесшумном режиме, и корректировки маршрута чистки, можно избежать воздействия бесшумного режима на качество очистки.
[0025] Следует понимать, что предшествующее общее описание и последующее подробное описание являются только иллюстративными и пояснительными, и не ограничивают изобретения, как заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0026] Прилагаемые чертежи, включенные в документ и составляющие часть данного описания, иллюстрируют варианты осуществления в соответствии с изобретением, и вместе с описанием служат для объяснения принципов изобретения.
[0027] Фиг. 1 представляет собой блок-схему способа бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления.
[0028] Фиг. 2 представляет собой блок-схему другого способа бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления.
[0029] Фиг. 3 представляет собой блок-схему другого способа бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления.
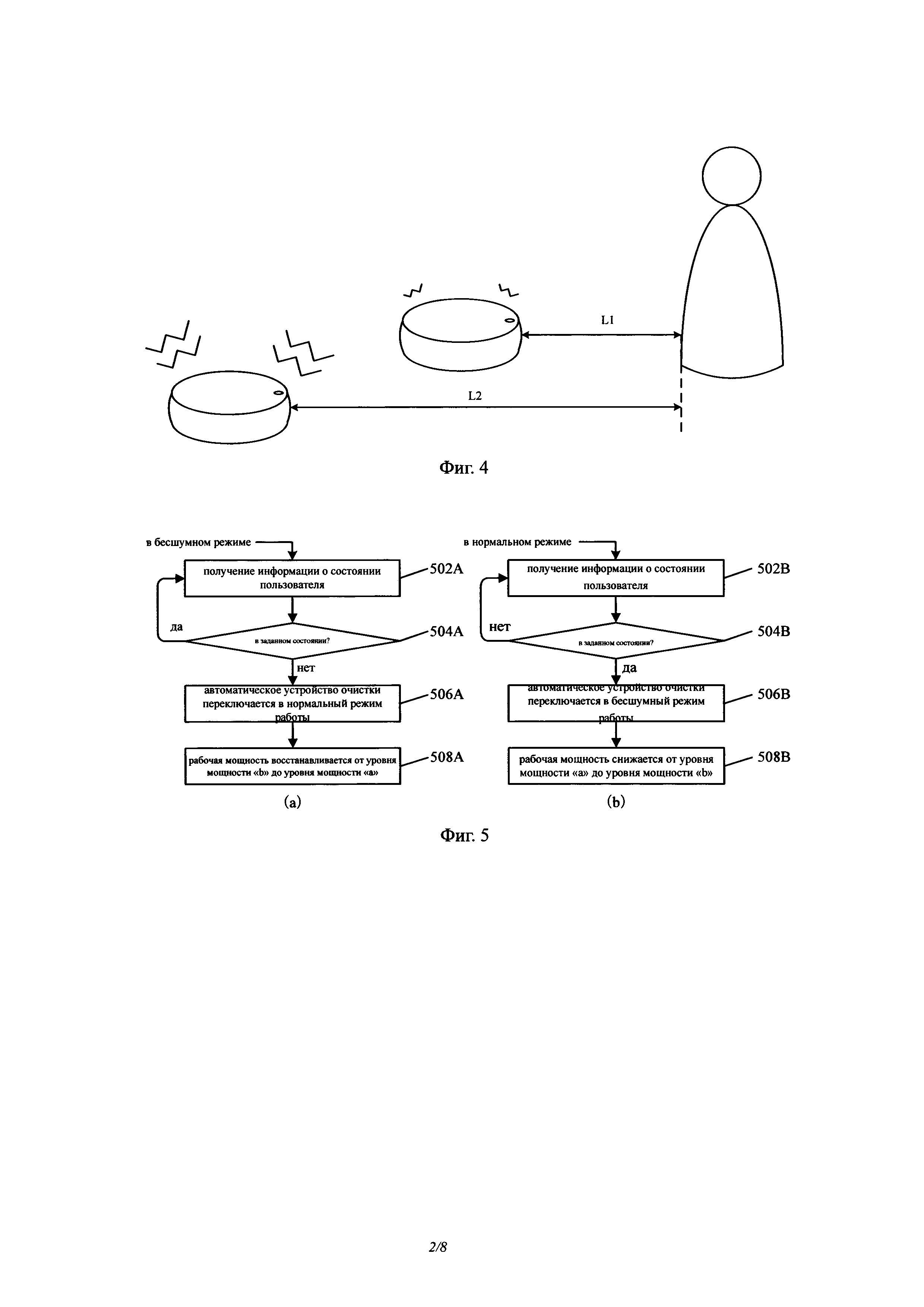
[0030] Фиг. 4 представляет собой принципиальную схему регулирования режима работы, в зависимости от расстояния, в соответствии с примерным вариантом осуществления.
[0031] Фиг. 5 представляет собой блок-схему другого способа бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления.
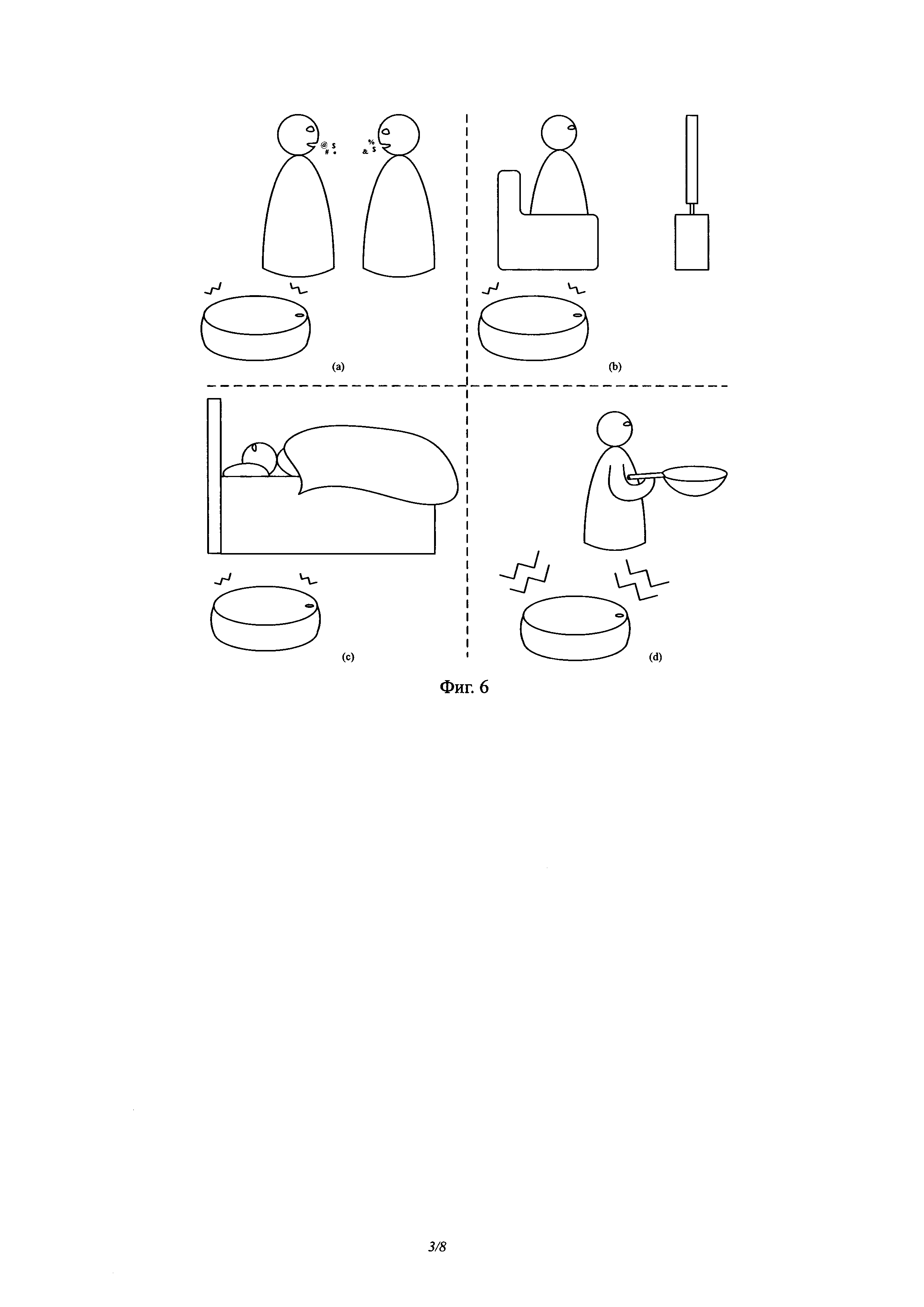
[0032] Фиг. 6 представляет собой принципиальную схему регулирования режима работы, в зависимости от состояния пользователя, в соответствии с примерным вариантом осуществления.
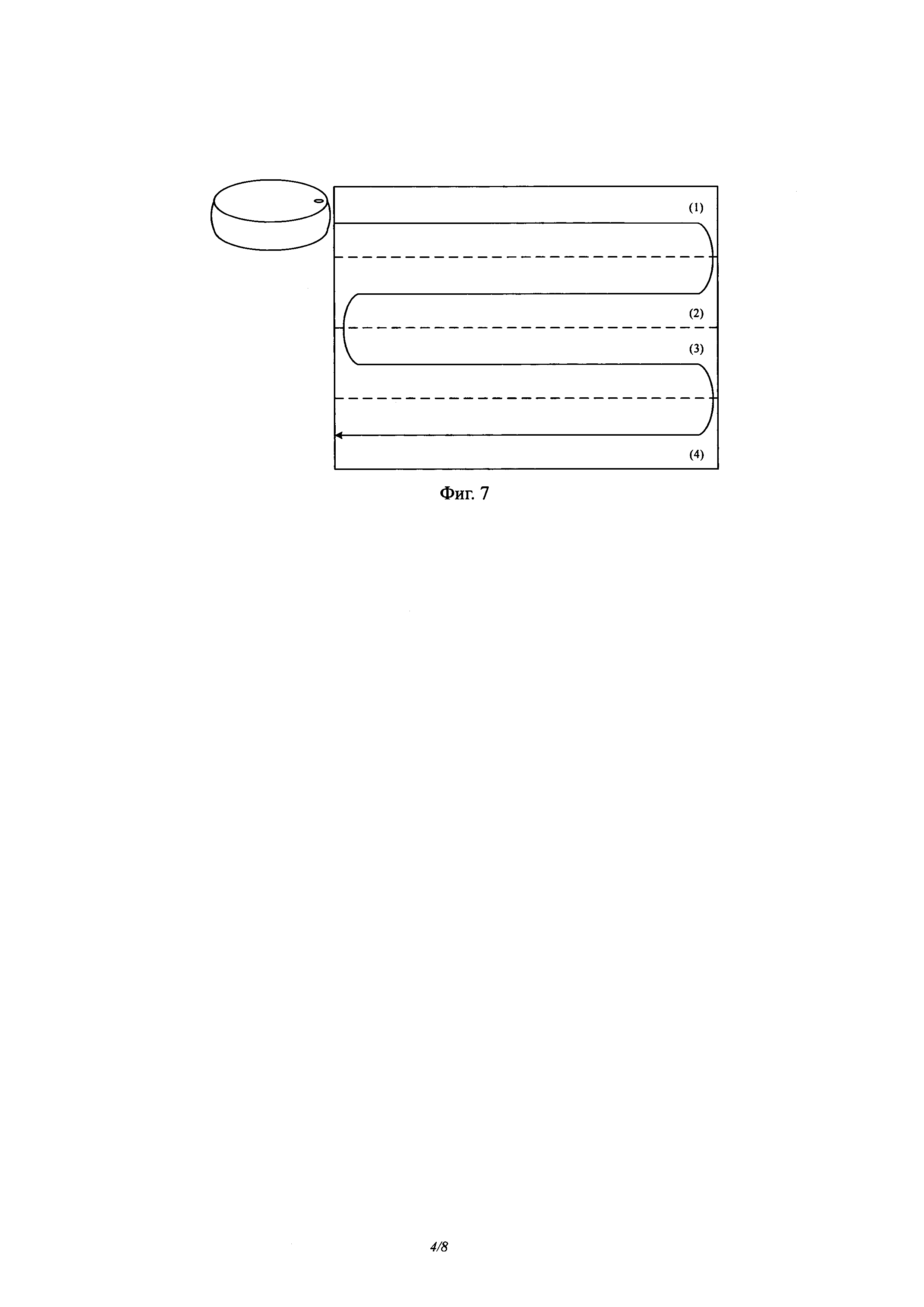
[0033] Фиг. 7 представляет собой принципиальную схему маршрута в нормальном режиме, в соответствии с примерным вариантом осуществления.
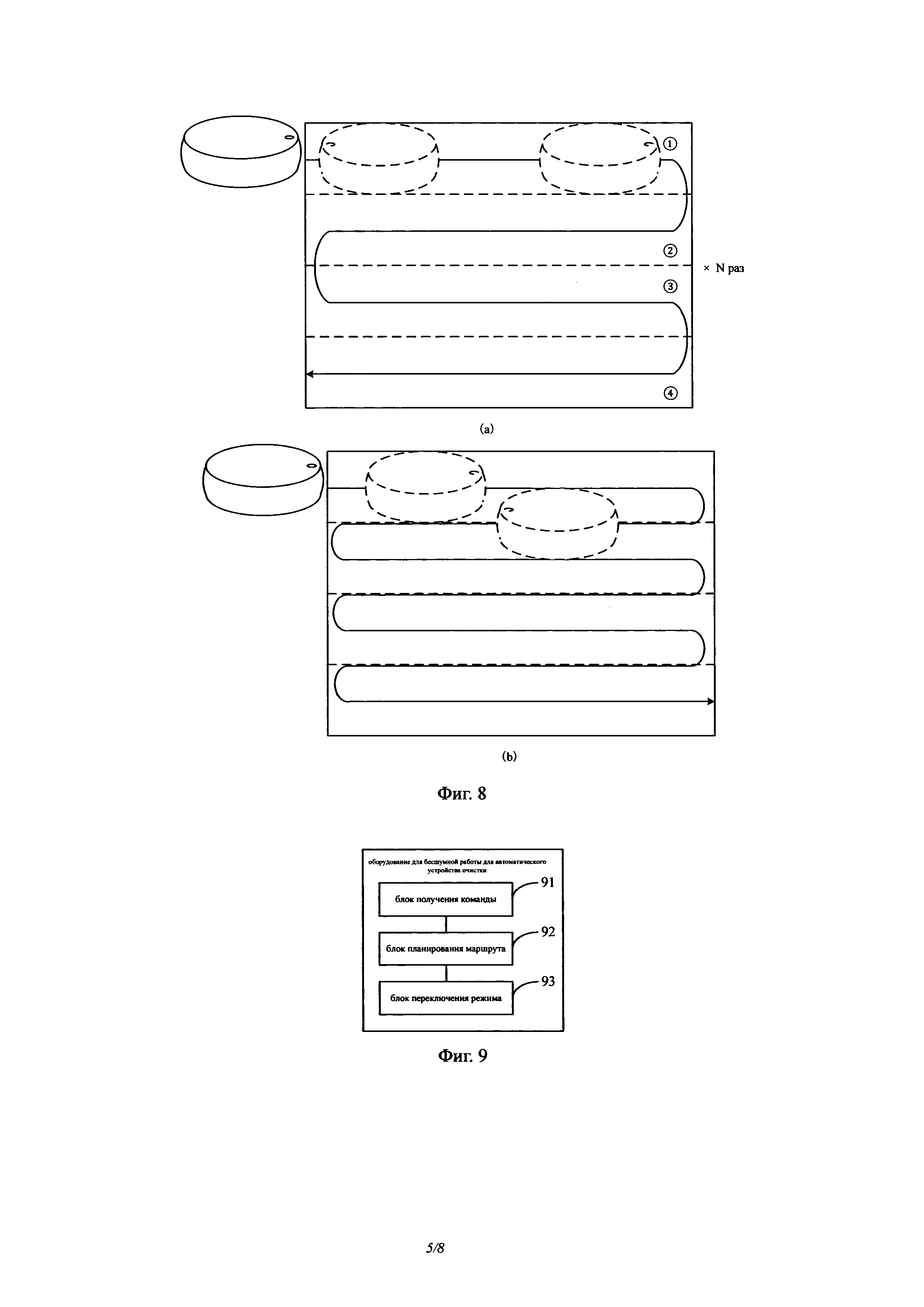
[0034] Фиг. 8 представляет собой принципиальную схему маршрута в бесшумном режиме, в соответствии с примерным вариантом осуществления.
[0035] Фиг. 9-15 представляют собой структурные схемы оборудования бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления.
[0036] Фиг. 16 представляет собой структурную схему устройства бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0037] Ниже будет приведено подробное описание примерных вариантов осуществления, примеры которых проиллюстрированы на прилагаемых чертежах. Следующее описание ссылается на прилагаемые чертежи, на которых одинаковые номера на разных чертежах представляют собой одинаковые или аналогичные элементы, если не указано иное. Реализации, изложенные в последующем описании примерных вариантов осуществления, не являются всеми реализациями, соответствующими изобретению. Они являются просто примерами устройств и способов, которые соответствуют аспектам, связанным с изобретением, как изложено в прилагаемой формуле изобретения.
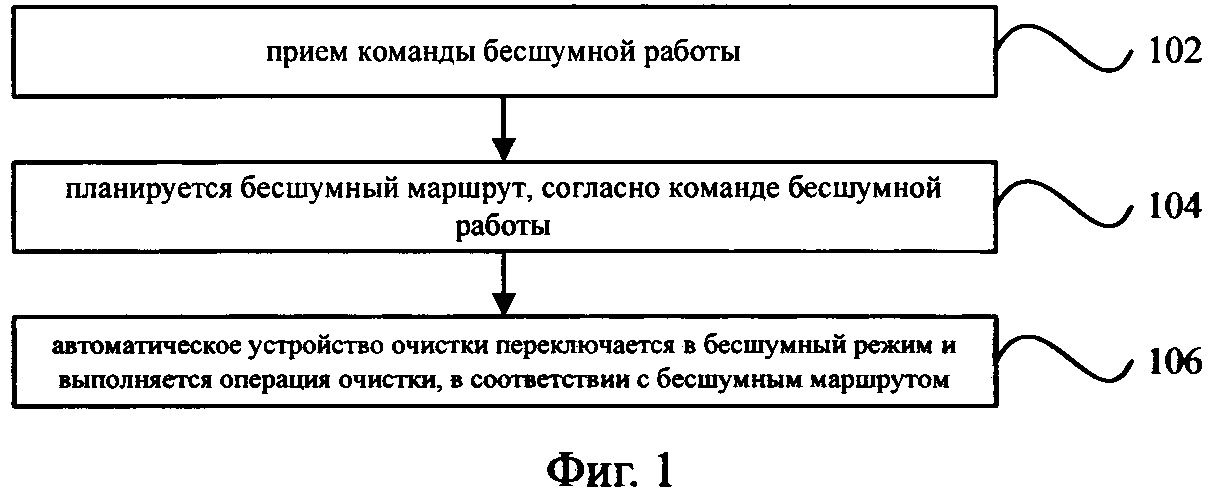
[0038] Фиг. 1 представляет собой блок-схему способа бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления, и, как показано на фиг. 1, этот способ применяется в автоматическом устройстве очистки и включает в себя следующие этапы.
[0039] На этапе 102 происходит прием команды бесшумной работы.
[0040] В этом варианте осуществления команда бесшумной работы может непосредственно вводиться пользователем, например, пользователь нажимает кнопку «Бесшумный режим» на автоматическом устройстве очистки или посылает сигнал переключения в «Бесшумный режим» на автоматическое устройство очистки посредством пульта дистанционного управления, интеллектуального устройства или других устройств, связанных с автоматическим устройством очистки, например, интеллектуальным устройством может быть смартфон.
[0041] В этом варианте осуществления команда бесшумной работы также может быть выдана автоматически блоком управления автоматического устройства очистки. Например, в качестве примерного варианта реализации, если относительное расстояние между автоматическим устройством очистки и пользователем меньше, команда бесшумной работы может быть выдана в соответствии с относительным расстоянием; или, в качестве другого примерного варианта реализации, команда бесшумной работы выдается в соответствии с обнаруженным состоянием пользователя, например, пользователь находится в спящем состоянии, в состоянии просмотра телевизора и т.д.
[0042] В этом варианте осуществления автоматическое устройство очистки может включать в себя автоматического робота-подметальщика, автоматического робота-полотера, автоматического робота для мойки окон и другие различные устройства, которые могут выполнять функцию автоматической очистки.
[0043] На этапе 104 планируется бесшумный маршрут, согласно команде бесшумной работы.
[0044] В этом варианте осуществления, в соответствии с принятой командой бесшумной работы, автоматическое устройство очистки должно быть переключено в бесшумный режим, например, для реализации эффекта «бесшумности» шум может быть уменьшен за счет снижения мощности устройства; поэтому путем планирования бесшумного маршрута воздействие, вызванное снижением мощности, может быть уменьшено, в соответствии с оптимизацией маршрута очистки.
[0045] На этапе 106 автоматическое устройство очистки переключается в бесшумный режим и выполняется операция очистки, в соответствии с бесшумным маршрутом.
[0046] Как указано в приведенных выше вариантах осуществления, с помощью технических решений настоящего изобретения, путем приема команды бесшумной работы и переключения в бесшумный режим, может быть снижена шумность во время работы, и может быть устранено воздействие на пользователя; кроме того, путем планирования бесшумного маршрута, применяемого в бесшумном режиме, и корректировки маршрута чистки, можно избежать воздействия бесшумного режима на качество очистки.
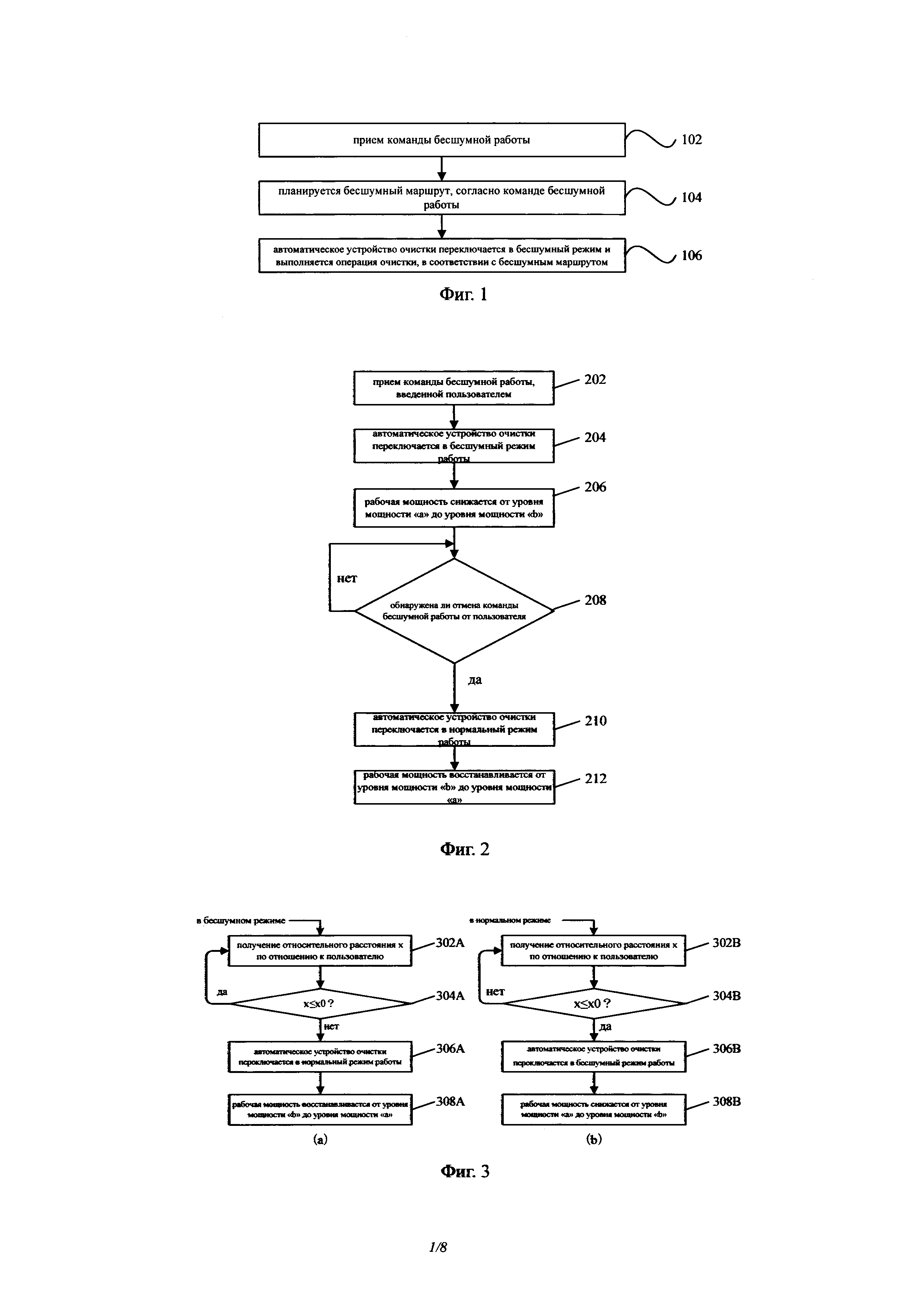
[0047] Фиг. 2 представляет собой блок-схему другого способа бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления, и, как показано на фиг. 2, этот способ включает в себя следующие этапы.
[0048] На этапе 202 происходит прием команды бесшумной работы, введенной пользователем.
[0049] В этом варианте осуществления пользователь может ввести команду на автоматическом устройстве очистки или отправить сигнал управления с помощью пульта дистанционного управления или интеллектуального устройства, подключенного к автоматическому устройству очистки для выдачи команды бесшумной работы.
[0050] На этапе 204 автоматическое устройство очистки переключается в бесшумный режим, в соответствии с принятой командой бесшумной работы.
[0051] На этапе 206, в бесшумном режиме, рабочая мощность снижается автоматическим устройством очистки от уровня мощности «а» до уровня мощности «b» (a>b).
[0052] В этом варианте осуществления, путем снижения мощности снижается рабочая частота устройства и/или амплитуда в автоматическом устройстве очистки, тем самым уменьшая уровень производимого шума, и реализуя эффект «бесшумности».
[0053] На этапе 208 определяется, была ли обнаружена отмена команды бесшумной работы от пользователя, и, при обнаружении отмены команды бесшумной работы от пользователя, выполняется этап 210; в ином случае продолжается работа в бесшумном режиме.
[0054] В этом варианте осуществления, если пользователь непосредственно вводит команду бесшумной работы в автоматическое устройство очистки, отражается субъективное ожидание того, что пользователь хочет, чтобы автоматическое устройство очистки работало в бесшумном режиме, и, таким образом, бесшумный режим должен поддерживаться до тех пор, пока пользователь не отменит команду бесшумной работы.
[0055] На этапе 210 автоматическое устройство очистки переключается в нормальный режим, в соответствии с отменой команды бесшумной работы от пользователя.
[0056] На этапе 212, в нормальном режиме, рабочая мощность восстанавливается автоматическим устройством очистки от уровня мощности «b» до уровня мощности «a».
[0057] Фиг. 3 представляет собой блок-схему другого способа бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления, и, как показано на фиг.3, этот способ включает в себя следующие этапы.
[0058] 1) Если автоматическое устройство очистки изначально находится в бесшумном режиме, как показано на фиг. 3(a).
[0059] На этапе 302А происходит получение относительного расстояния x по отношению к пользователю.
[0060] В этом варианте осуществления относительное расстояние x между автоматическим устройством очистки и пользователем может быть получено различными способами. Например, в качестве примерного варианта реализации, относительное направление пользователя может быть определено с помощью звука, света, функции распознавания лица и т.д., а затем выполняется операция определения дальности в этом направлении (например, посредством инфракрасного луча, ультразвука и т.д.) для получения относительного расстояния.
[0061] На этапе 304А определяется, является ли относительное расстояние x меньшим или равным заданному расстоянию x0; если относительное расстояние x меньше или равно заданному расстоянию x0, сохраняется беззвучный режим и выполняется этап 302А; в ином случае выполняется этап 306А.
[0062] На этапе 306А автоматическое устройство очистки переключается в нормальный режим работы.
[0063] На этапе 308А, в нормальном режиме, рабочая мощность восстанавливается автоматическим устройством очистки от уровня мощности «b» до уровня мощности «a».
[0064] 2) Если автоматическое устройство очистки изначально находится в нормальном режиме, как показано на фиг. 3(b).
[0065] На этапе 302В происходит получение относительного расстояния x по отношению к пользователю.
[0066] На этапе 304В определяется, является ли относительное расстояние x меньшим или равным заданному расстоянию x0; если относительное расстояние x меньше или равно заданному расстоянию x0, выполняется этап 306В; в ином случае сохраняется нормальный режим и выполняется этап 302В.
[0067] На этапе 306В автоматическое устройство очистки переключается в бесшумный режим работы.
[0068] На этапе 308В, в бесшумном режиме, рабочая мощность снижается автоматическим устройством очистки от уровня мощности «а» до уровня мощности «b».
[0069] В описанном выше варианте осуществления, если взять в качестве примера автоматического робота-подметальщика, показанного на фиг. 4, если обнаруживается относительное расстояние x=L1 и L1<x0, автоматический робот-подметальщик переключается в (или поддерживает) бесшумный режим и планирует соответствующий бесшумный маршрут для реализации бесшумного подметания; если обнаруживается относительное расстояние x=L2 и L2>x0, автоматический робот-подметальщик переключается в (или поддерживает) нормальный режим и выбирает предустановленный исходный маршрут для реализации нормального подметания.
[0070] Автоматический робот-подметальщик может обнаруживать относительное расстояние в режиме реального времени во время работы, и реализовать переключение между бесшумным режимом и нормальным режимом в режиме реального времени, в соответствии с обнаруженным результатом.
[0071] Фиг. 5 представляет собой блок-схему другого способа бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления, и, как показано на фиг. 5, этот способ включает в себя следующие этапы.
[0072] 1) Если автоматическое устройство очистки изначально находится в бесшумном режиме, как показано на фиг. 5(a).
[0073] На этапе 502А происходит получение информации о состоянии пользователя.
[0074] В этом варианте осуществления информация о состоянии пользователя может быть получена различными способами. Как показано на фиг. 6, пользователь находится в состоянии «обмен текстовыми сообщениями» на фиг. 6(a), пользователь находится в состоянии «просмотр телевизора» на фиг. 6(b), пользователь находится в состоянии «отдых» на фиг. 6(c), и пользователь находится в состоянии «приготовление пищи» на фиг. 6(d); таким образом состояние пользователя в режиме реального времени может быть точно определено на основе характеристик пользователя в каждом состоянии.
[0075] Например, может быть обнаружена интенсивность шума в окружающей среде. Если интенсивность шума низкая, пользователь может находиться в состоянии «отдых», и требуется бесшумный режим. Если интенсивность шума высокая, пользователь может находиться в состоянии «обмен текстовыми сообщениями», «просмотр телевизора» или «приготовление пищи», и в таком случае следует дополнительно учитывать информацию о местоположении пользователя. Если пользователь находится в гостиной, пользователь находится в состоянии «обмен текстовыми сообщениями» или «просмотр телевизора», и требуется бесшумный режим. Если пользователь находится в кухне, пользователь находится в состоянии «приготовление пищи», и выбирается обычный режим.
[0076] На этапе 504А определяется, является ли информация о состоянии пользователя в заданном состоянии; если информация о состоянии пользователя находится в заданном состоянии, сохраняется бесшумный режим и выполняется этап 502А; в ином случае выполняется этап 506А.
[0077] На этапе 506А автоматическое устройство очистки переключается в нормальный режим работы.
[0078] На этапе 508А, в нормальном режиме, рабочая мощность восстанавливается автоматическим устройством очистки от уровня мощности «b» до уровня мощности «a».
[0079] 2) Если автоматическое устройство очистки изначально находится в нормальном режиме, как показано на фиг. 5(b).
[0080] На этапе 502В происходит получение информации о состоянии пользователя.
[0081] На этапе 504В определяется, является ли информация о состоянии пользователя в заданном состоянии; если информация о состоянии пользователя находится в заданном состоянии, выполняется этап 506В; в ином случае сохраняется нормальный режим и выполняется этап 502В.
[0082] На этапе 506В автоматическое устройство очистки переключается в бесшумный режим работы.
[0083] На этапе 508В, в бесшумном режиме, рабочая мощность снижается автоматическим устройством очистки от уровня мощности «а» до уровня мощности «b».
[0084] В описанном выше варианте осуществления, из-за бесшумного режима снижение рабочей мощности автоматического устройства очистки приводит к снижению соответствующего качества очистки; если операция очистки по-прежнему выполняется в соответствии с исходным маршрутом, это может повлиять на результат очистки. Например, фиг. 7 представляет собой принципиальную схему маршрута в нормальном режиме, в соответствии с примерным вариантом осуществления. Принимая в качестве примера автоматического робота-подметальщика, при условии, что продольная ширина помещения в четыре раза превышает ширину подметания (если предположить, что ширина подметания равна диаметру основания автоматического робота-подметальщика) автоматического робота-подметальщика, в нормальном режиме автоматический робот-подметальщик фактически делит комнату на четыре поперечные зоны (зона  , зона
, зона  , зона
, зона  и зона
и зона  ) и операция очистки выполняется в соответствии с исходным маршрутом, обозначенным сплошной линией на фиг. 7, что позволяет зоне очистки, образованной автоматическим роботом-подметальщиком, сформировать слой, покрывающий весь пол комнаты.
) и операция очистки выполняется в соответствии с исходным маршрутом, обозначенным сплошной линией на фиг. 7, что позволяет зоне очистки, образованной автоматическим роботом-подметальщиком, сформировать слой, покрывающий весь пол комнаты.
[0085] Поэтому, чтобы достичь аналогичного или лучшего качества очистки в бесшумном режиме при более низкой мощности, чем в нормальном режиме, маршрут очистки может быть улучшен, т.е. маршрут очистки формируется в соответствии с исходным маршрутом, показанным на фиг. 7, и длина бесшумного маршрута превышает длину исходного маршрута. В это время, поскольку площадь помещения и ширина очистки автоматического робота-подметальщика не меняются, увеличение длины бесшумного маршрута позволит автоматическому роботу-подметальщику реализовать дальнейшую очистку на основании того, что область очистки, образованная автоматическим роботом-подметальщиком, образует слой, покрывающий весь пол комнаты; другими словами, автоматический робот-подметальщик должен выполнить повторное подметание пола комнаты, чтобы компенсировать снижение качества очистки из-за более низкой мощности, или достичь лучшей эффективности очистки.
[0086] В качестве примерного варианта осуществления, для получения бесшумного маршрута выполняется сочетание повторяющихся действий на заданном количестве исходных маршрутов. Как показано на фиг. 8(а), в бесшумном режиме автоматический робот-подметальщик должен повторить операцию по очистке комнаты N раз, то есть, сочетание повторяющихся действий можно понимать следующим образом: бесшумный маршрут может быть получен путем повторения множества исходных маршрутов; или, поскольку начальное положение и конечное положение исходного маршрута не перекрывают друг друга, сочетание повторяющихся действий следует понимать следующим образом: («исходный маршрут» + «обратный исходный маршрут» (т.е. маршрут аналогичен исходному маршруту, но направление противоположно направлению исходного маршрута, начальным положением является левый нижний угол комнаты и конечным положением является верхний левый угол комнаты)») × М раз (т.е. («исходный маршрут» + «обратный исходный маршрут») повторяется М раз); или если исходный маршрут соответствует участку подмаршрута в пределах каждой зоны помещения, сочетание повторяющихся действий следует понимать таким образом: каждый участок подмаршрута подметается N раз, то есть, участок подмаршрута подметается N раз, а затем следующий участок подмаршрута подметается N раз, пока не будут подметены все подмаршруты.
[0087] В качестве другого примерного варианта реализации, бесшумный маршрут создается согласно интенсивности исходного маршрута, причем интенсивность бесшумного маршрута превышает интенсивность исходного маршрута. Как показано на фиг. 8(b), бесшумный маршрут разделяется на множество подмаршрутов в поперечном направлении; соседние подмаршруты в продольном направлении являются более интенсивными по отношению к исходному маршруту. Как показано на фиг. 7, ширина между соседними подмаршрутами является шириной подметания автоматического робота-подметальщика, однако, на фиг. 8 ширина между соседними подмаршрутами меньше, чем ширина подметания автоматического робота-подметальщика, и, таким образом, участки очистки, соответствующие подмаршрутам, накладываются друг на друга, и на том же самом месте выполняется несколько чисток, что улучшает результат очистки.
[0088] В соответствии с описанными выше вариантами осуществления способа бесшумной работы автоматического устройства очистки, настоящее изобретение также предусматривает варианты осуществления оборудования бесшумной работы автоматического устройства очистки.
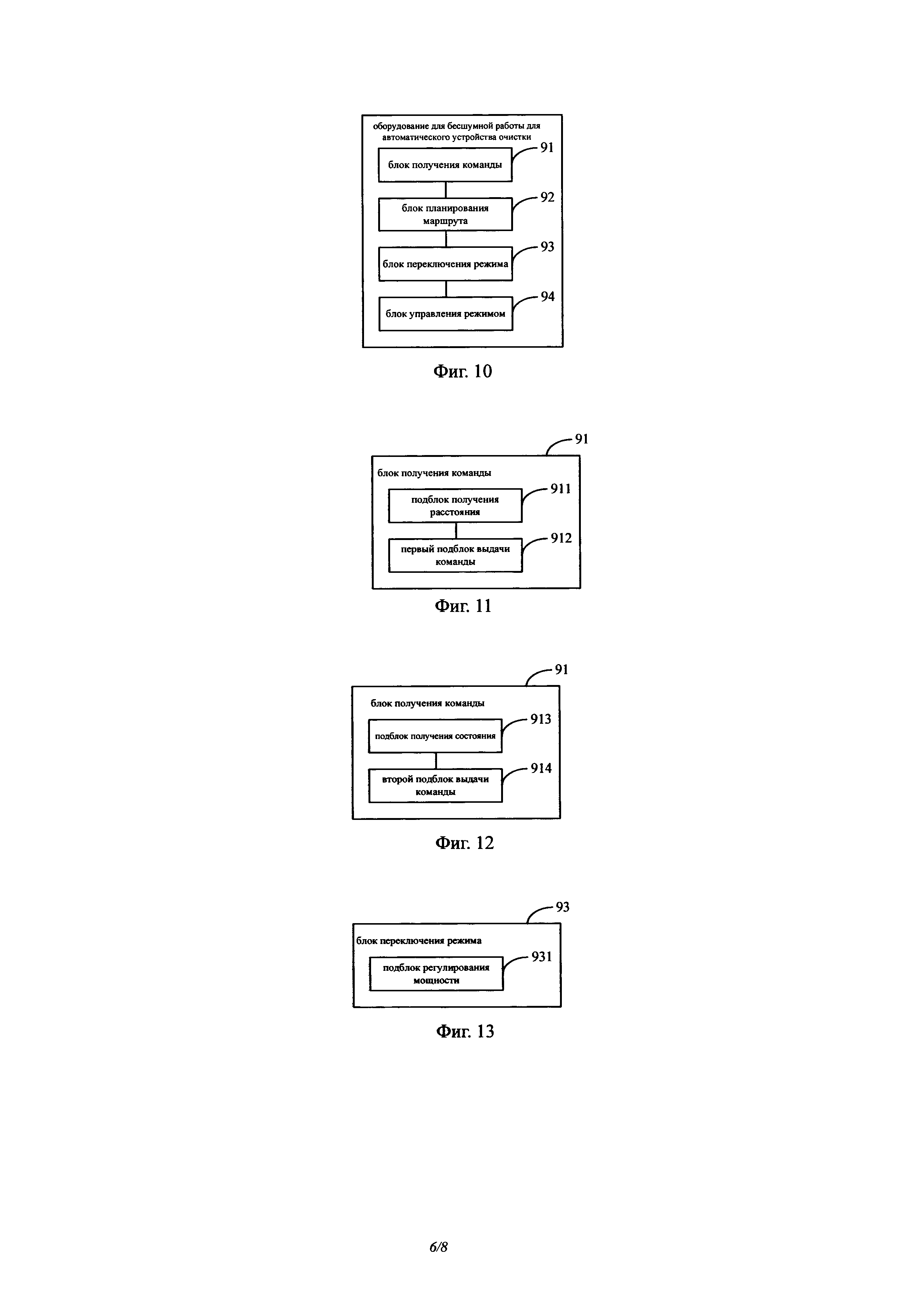
[0089] Фиг. 9 представляет собой структурную схему оборудования бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления. Как показано на фиг. 9, оборудование бесшумной работы включает в себя блок 91 приема команды, блок 92 планирования маршрута и блок 93 переключения режима.
[0090] Блок 91 приема команды сконфигурирован для приема команды бесшумной работы.
Блок 92 планирования маршрута сконфигурирован для планирования бесшумного маршрута, согласно команде бесшумной работы.
Блок 93 переключения режима сконфигурирован для переключения в бесшумный режим и выполнения операции очистки, в соответствии с бесшумным маршрутом.
[0091] Как показано на фиг. 10, фиг. 10 представляет собой структурную схему, показывающую другое оборудование бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления; в этом варианте осуществления, основанном на описанном выше варианте осуществления на фиг. 9, команда бесшумной работы вводится пользователем, и оборудование бесшумной работы может дополнительно включать в себя блок 94 управления режимом.
[0092] Блок 94 управления режимом сконфигурирован для возвращения в нормальный режим из режима бесшумной работы при обнаружении отмены команды бесшумной работы от пользователя, в ином случае - для продолжения работы в бесшумном режиме.
[0093] Как показано на фиг. 11, фиг. 11 представляет собой структурную схему, показывающую другое оборудование бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления; в этом варианте осуществления, основанном на описанном выше варианте осуществления на фиг. 9, блок 91 приема команды может включать в себя подблок 911 получения расстояния и первый подблок 912 выдачи команды.
[0094] Подблок 911 получения расстояния сконфигурирован для получения относительного расстояния по отношению к пользователю.
Первый подблок 912 выдачи команды сконфигурирован для выдачи команды бесшумной работы, если относительное расстояние меньше или равно заданному расстоянию.
[0095] Как показано на фиг. 12, фиг. 12 представляет собой структурную схему, показывающую другое оборудование бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления; в этом варианте осуществления, основанном на описанном выше варианте осуществления на фиг. 9, блок 91 приема команды может включать в себя подблок 913 получения состояния и второй подблок 914 выдачи команды.
[0096] Подблок 913 получения состояния сконфигурирован для получения информации о состоянии пользователя.
Второй подблок 914 выдачи команды сконфигурирован для выдачи команды бесшумной работы, если пользователь находится в заданном состоянии.
[0097] Как показано на фиг. 13, фиг. 13 представляет собой структурную схему, показывающую другое оборудование бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления; в этом варианте осуществления, основанном на описанном выше варианте осуществления на фиг. 9, блок 93 переключения режима может включать в себя подблок 931 регулировки мощности.
[0098] Подблок 931 регулировки мощности сконфигурирован для снижения рабочей мощности автоматического устройства очистки до заданного значения.
[0099] Следует отметить, что конструкция подблока 931 регулировки мощности в описанном выше варианте осуществления, показанном на фиг. 13, также может быть включена в вышеуказанных вариантах осуществления оборудования на фиг. 10-12, что не ограничивается в настоящем изобретении.
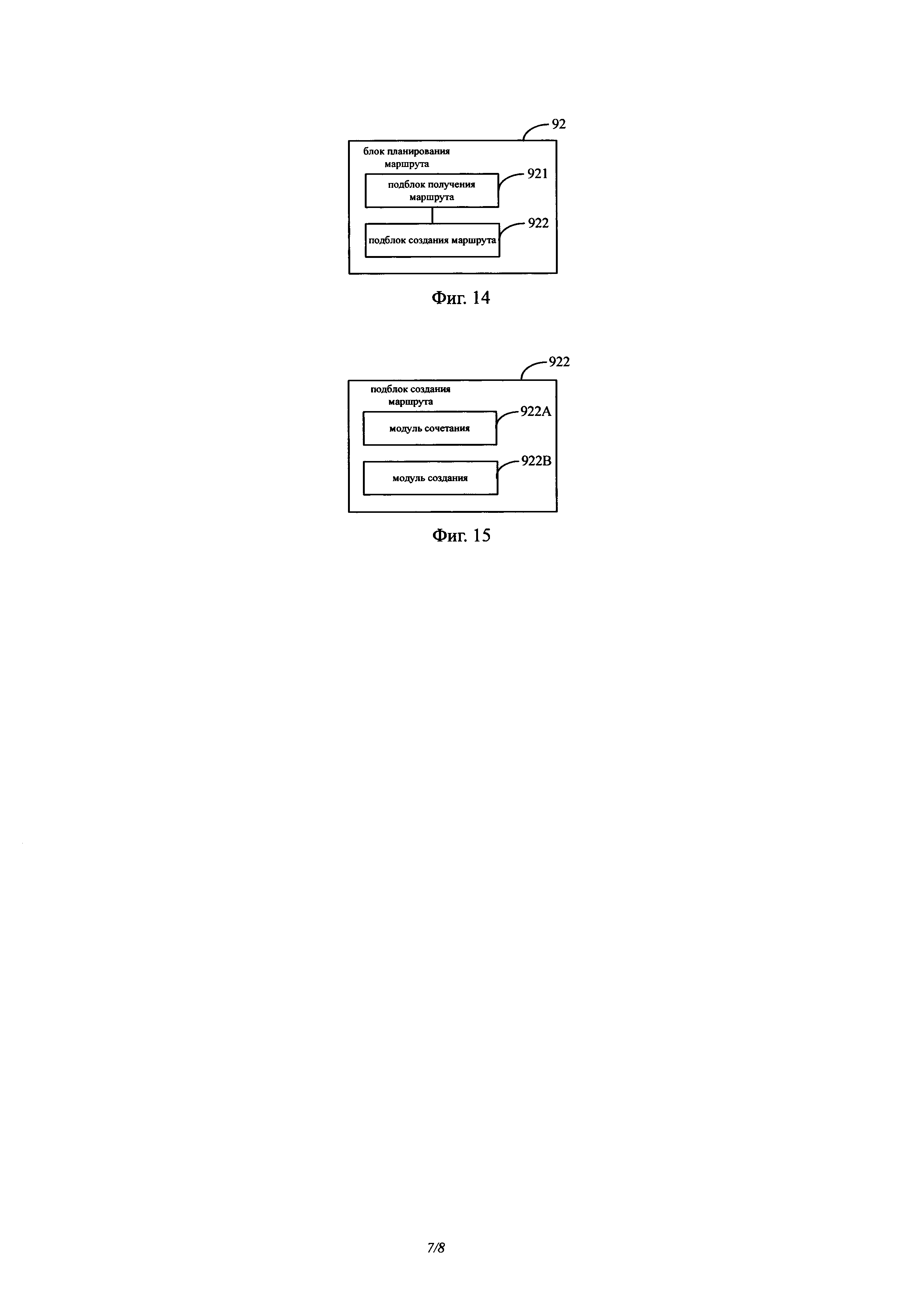
[00100] Как показано на фиг. 14, фиг. 14 представляет собой структурную схему, показывающую другое оборудование бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления; в этом варианте осуществления, основанном на описанном выше варианте осуществления на фиг. 9, блок 92 планирования маршрута может включать в себя подблок 921 получения маршрута и подблок 922 создания маршрута.
[00101] Подблок 921 получения маршрута сконфигурирован для получения исходного маршрута.
Подблок 922 создания маршрута сконфигурирован для создания бесшумного маршрута, согласно исходному маршруту, причем длина бесшумного маршрута превышает длину исходного маршрута.
[00102] Следует отметить, что конструкции подблока 921 получения маршрута и подблока 922 создания маршрута в описанном выше варианте осуществления, показанном на фиг. 14, также могут быть включены в вышеуказанных вариантах осуществления оборудования на фиг. 10-13, что не ограничивается в настоящем изобретении.
[00103] Как показано на фиг. 15, фиг.15 представляет собой структурную схему, показывающую другое оборудование бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления; в этом варианте осуществления, основанном на описанном выше варианте осуществления на фиг. 14, подблок 922 создания маршрута может включать в себя модуль 922А сочетания или модуль 922В создания.
[00104] Модуль 922А сочетания сконфигурирован для выполнения сочетания повторяющихся действий на заданном количестве исходных маршрутов для получения бесшумного маршрута.
Модуль 922В создания сконфигурирован для создания бесшумного маршрута, согласно интенсивности исходного маршрута, причем интенсивность бесшумного маршрута превышает интенсивность исходного маршрута.
[00105] Что касается оборудования в приведенных выше вариантах осуществления, конкретные способы выполнения операций отдельных модулей были подробно описаны в вариантах осуществления, касающихся осуществления способов, которые не будут описаны в данном документе снова.
[00106] Поскольку варианты осуществления оборудования существенно соответствуют вариантам осуществления способа, в отношении связанных частей вариантов осуществления устройства делается ссылка на соответствующие части вариантов осуществления способа. Описанные выше варианты осуществления оборудования являются лишь иллюстративными, причем блок, в качестве отдельного компонента, может быть или может не быть физически разделен, компонент, отображаемый как блок, может быть или может не быть физическим блоком, то есть, может быть расположен на месте, или может быть распределен по нескольким сетевым блокам. Некоторые или все модули могут быть выбраны в соответствии с фактическими требованиями для достижения задач настоящего изобретения, которые могут быть поняты или реализованы специалистами в данной области техники без творческого труда.
[00107] Соответственно, настоящее изобретение также предлагает оборудование бесшумной работы автоматического устройства очистки, включающее в себя: процессор; память для хранения команд, исполняемых процессором; причем процессор сконфигурирован для: приема команды бесшумной работы; планирования бесшумного маршрута, в соответствии с командой бесшумной работы; переключения в бесшумный режим и выполнения операции очистки, в соответствии с бесшумным маршрутом.
[00108] Соответственно, настоящее изобретение также предлагает терминал, и терминал включает в себя память, и одну или несколько программ, причем одна или несколько программ содержатся в памяти и сконфигурированы для выполнения одним или несколькими процессорами, и включают команды для выполнения следующих операций по приему команды бесшумной работы, планированию бесшумного маршрута в соответствии с командой бесшумной работы, переключению в бесшумный режим и выполнения операции очистки в соответствии с бесшумным маршрутом.
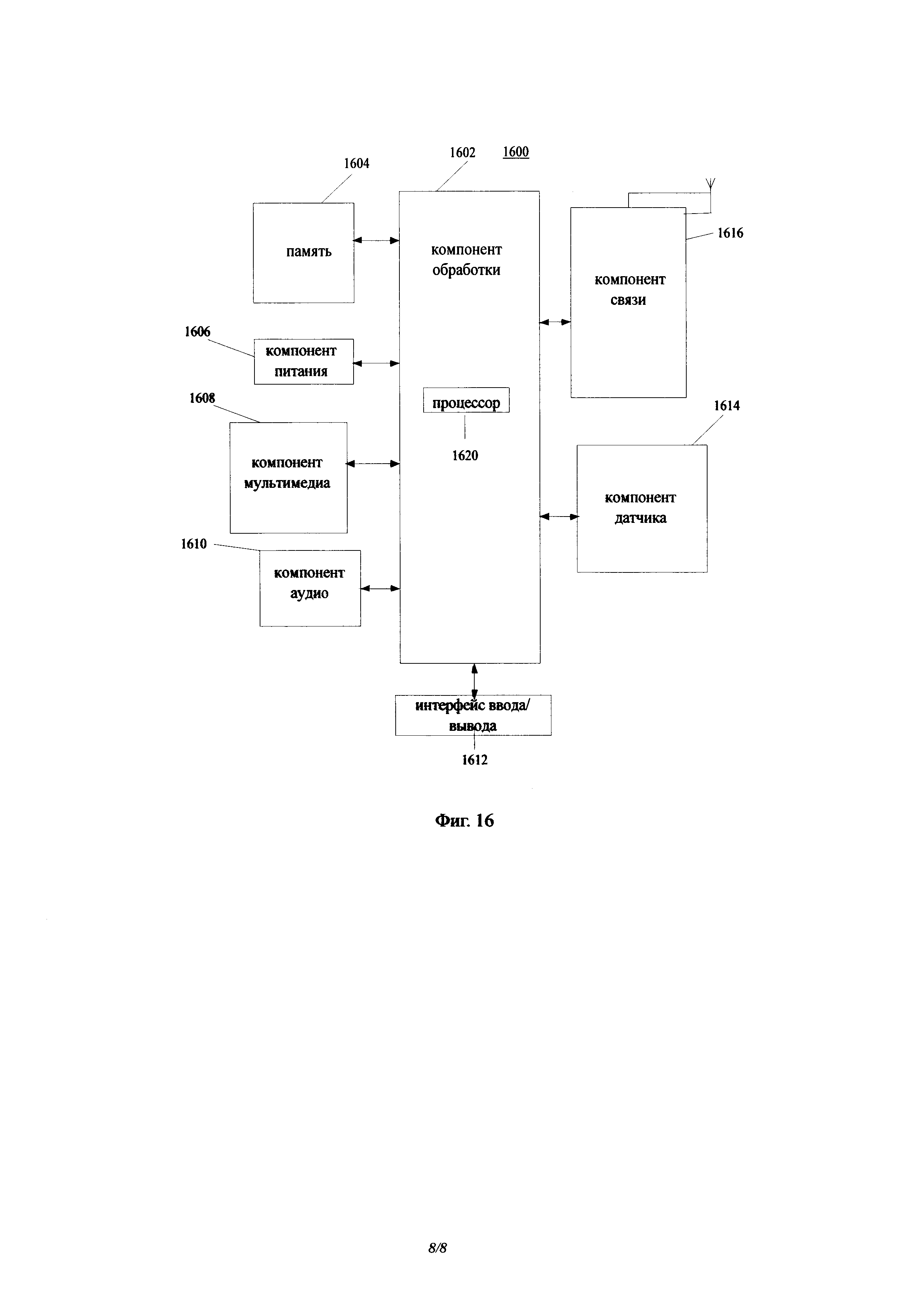
[00109] Фиг. 16 представляет собой структурную схему устройства 1600 для бесшумной работы автоматического устройства очистки, в соответствии с примерным вариантом осуществления. Например, устройство 1600 может быть мобильным телефоном, компьютером, цифровым терминалом вещания, приемопередатчиком сообщений, игровой консолью, планшетом, медицинским устройством, тренажерным оборудованием, персональным цифровым помощником и т.п.
[00110] Как показано на фиг.16, устройство 1600 может включать в себя один или более из следующих компонентов: компонент 1602 обработки, память 1604, компонент 1606 питания, компонент 1608 мультимедиа, компонент 1610 аудио, интерфейс 1612 ввода/вывода (I/O), компонент 1614 датчика и компонент 1616 связи.
[00111] Компонент 1602 обработки обычно управляет всеми операциями устройства 1600, такими как операции, связанные с дисплеем, телефонными звонками, передачей данных, работой камеры и операциями записи. Компонент 1602 обработки может включать один или несколько процессоров 1620 для выполнения команд для осуществления всех или части этапов из описанных выше способов. Кроме того, компонент 1602 обработки может включать в себя один или несколько модулей, которые облегчают взаимодействие между компонентом 1602 обработки и другими компонентами. Например, компонент 1602 обработки может включать в себя мультимедийный модуль для облегчения взаимодействия между компонентом 1608 мультимедиа и компонентом 1602 обработки.
[00112] Память 1604 сконфигурирована для хранения различных типов данных, чтобы поддерживать работу устройства 1600. Примеры таких данных включают в себя инструкции для любых приложений или способов, используемых на устройстве 1600, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Память 1604 может быть реализована с использованием любого типа энергозависимых или энергонезависимых запоминающих устройств, или их сочетания, например, статического оперативного запоминающего устройства (SRAM), электрически стираемого программируемого постоянного запоминающего устройства (EEPROM), стираемого программируемого постоянного запоминающего устройства (EPROM), программируемого постоянного запоминающего устройства (PROM), постоянного запоминающего устройства (ПЗУ), магнитного запоминающего устройства, флэш-памяти, магнитного или оптического диска.
[00113] Компонент 1606 питания обеспечивает питание различным компонентам устройства 1600. Компонент 1606 питания может включать в себя систему управления питанием, один или более источников питания, и любые другие компоненты, связанные с выработкой, управлением и распределением электроэнергии в устройстве 1600.
[00114] Компонент 1608 мультимедиа включает в себя экран, обеспечивающий выходной интерфейс между устройством 1600 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть выполнен в виде сенсорного экрана для получения входных сигналов от пользователя. Сенсорная панель включает в себя один или несколько датчиков контакта для определения касаний, сдвигов и жестов на сенсорной панели. Датчики касания могут не только ощущать границу касания или сдвига, но также продолжительность и силу нажима, связанные с касанием или сдвигом. В некоторых вариантах осуществления компонент 1608 мультимедиа включает в себя фронтальную камеру и/или заднюю камеру. Фронтальная камера и задняя камера могут получать внешние мультимедийные данные, когда устройство 1600 находится в рабочем режиме, например, в режиме фотографирования или режиме съемки видео. Фронтальная и задняя камеры могут быть снабжены системой фиксированных оптических линз или иметь возможность фокуса и оптического приближения.
[00115] Компонент 1610 аудио сконфигурирован для вывода и/или ввода аудиосигналов. Например, компонент 1610 аудио включает в себя микрофон ("MIC"), сконфигурированный для приема внешнего аудиосигнала, когда устройство 1600 находится в рабочем режиме, например, режиме вызова, режиме записи и режиме распознавания голоса. Принятый аудиосигнал может в дальнейшем сохраняться в памяти 1604 или передаваться через компонент 1616 связи. В некоторых вариантах осуществления компонент 1610 аудио дополнительно включает в себя динамик для вывода аудиосигналов.
[00116] Интерфейс 1612 ввода/вывода обеспечивает интерфейс между компонентом 1602 обработки и периферийными интерфейсными модулями, такими как клавиатура, колесо мыши, кнопки и т.п. Кнопки могут включать в себя, помимо прочего, кнопку начального узла, кнопку громкости, кнопку пуска и кнопку блокировки.
[00117] Компонент 1614 датчика включает в себя один или несколько датчиков для обеспечения оценки состояния различных аспектов устройства 1600. Например, компонент 1614 датчика может обнаруживать открытое/закрытое состояние устройства 1600, относительное позиционирование компонентов (например, дисплея и клавиатуры устройства 1600), изменение в положении устройства 1600 или компонента в устройстве 1600, присутствие или отсутствие контакта пользователя с устройством 1600, ориентацию или ускорение/замедление устройства 1600 и изменение температуры устройства 1600. Компонент 1614 датчика может включать в себя датчик приближения, сконфигурированный для обнаружения присутствия близлежащих объектов без физического контакта. Компонент 1614 датчика может также включать в себя датчик света, например, КМОП или датчик изображения ПЗС, для использования при получении изображений. В некоторых вариантах осуществления компонент 1614 датчика может также включать датчик акселерометра, датчик гироскопа, магнитный датчик, датчик давления или датчик температуры.
[00118] Компонент 1616 связи сконфигурирован для облегчения проводной или беспроводной связи между устройством 1600 и другими устройствами. Устройство 1600 может получать доступ к беспроводной сети на основе стандарта связи, например, WiFi, 2G или 3G, или их сочетания. В одном примерном варианте осуществления компонент 1616 связи принимает широковещательный сигнал или транслируемую информацию от внешней системы управления посредством широковещательного канала. В одном примерном варианте осуществления компонент 1616 связи дополнительно включает в себя модуль связи малого радиуса действия (NFC) для обеспечения связи ближнего радиуса действия. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), сверхширокополосной технологии (UWB), технологии Bluetooth (ВТ) и других технологий.
[00119] В примерных вариантах осуществления устройство 1600 может быть реализовано с одной или несколькими специализированными интегральными схемами (ASIC), цифровыми сигнальными процессорами (DSP), цифровыми устройствами обработки сигналов (DSPD), программируемыми логическими устройствами (PLD), массивами программируемых вентильных матриц (FPGA), контроллерами, микроконтроллерами, микропроцессорами или другими электронными компонентами для осуществления описанных выше способов.
[00120] В примерных вариантах осуществления также предлагается энергонезависимый машиночитаемый носитель данных, включающий команды, такие как в памяти 1604, исполняемые процессором 1620 в устройстве 1600 для выполнения описанных выше способов. Например, энергонезависимым машиночитаемым носителем данных может быть ROM, RAM, CD-ROM, магнитная лента, гибкий диск, оптическое устройство хранения данных и т.п.
[00121] Другие варианты осуществления изобретения будут очевидны для специалистов в данной области при рассмотрении описания и изучении изобретения. Предполагается, что эта заявка охватывает любые изменения, варианты применения или адаптацию изобретения, согласно изложенным общим принципам, и включая такие отклонения от настоящего изобретения, которые известны или являются обычной практикой в данной области. Предполагается, что описание и примеры будут рассматриваться только в качестве примера, с истинной сущностью и объемом изобретения, указанным в прилагаемой формуле изобретения.
[00122] Следует понимать, что настоящее изобретение не ограничивается точной конструкцией, описанной выше и проиллюстрированной на сопроводительных чертежах, и что различные модификации и изменения могут быть сделаны без отступления от объема изобретения. Предполагается, что объем изобретения ограничивается только прилагаемой формулой изобретения.
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта
Способ и устройство для корректировки цвета кожи
Способ, аппарат и устройство для сегментации изображения
Способ и мобильный терминал для реализации будильника в выключенном состоянии
Способ и устройство для идентификации телефонного вызова
Способ и устройство для привязки ключа токена к учетной записи
Способ и аппарат для управления интеллектуальным освещением
Способ, устройство и терминал для настройки виджета
Способ предоставления видео в режиме реального времени и устройство для его осуществления, а также сервер и терминальное устройство
Способ и устройство подсказки для выбора места в зале
Способ и устройство для увеличения отображаемого шрифта

