Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ ОЦЕНКИ РИСКОВ АВАРИЙ ДЛЯ ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Данное изобретение относится к способу оценки рисков аварий для движущегося транспортного средства. Изобретение относится также к компьютерному программному продукту, содержащему программный код для компьютера, предназначенный для осуществления способа в соответствии с изобретением. Изобретение также относится к устройству для оценки рисков аварий для движущегося транспортного средства и к транспортному средству, оснащенному таким устройством.
Характеристика предшествующего уровня техники
В процессе эксплуатации транспортных средств, например автомобилей большой грузоподъемности, в определенных ситуациях дорожного движения возможен повышенный риск столкновения с различными объектами или сооружениями. Риск столкновения может стать больше во время эксплуатации транспортных средств в районах плотной застройки.
Существуют современные системы, которые могут предупреждать водителя, транспортное средство которого приближается к впереди идущему транспортному средству. В определенных случаях, система управления транспортного средства автоматически оказывает тормозящее воздействие на тормоза транспортного средства, если есть повышенный риск столкновения с впередиидущими транспортными средствами. Транспортные средства также снабжены, например, системами поддержки, которые могут активно выдавать предупреждения, если датчик расстояния обнаруживает, что расстояние от транспортного средства до объекта меньше заданного порогового значения.
Тем не менее, в автомобильной промышленности всегда есть потребность в дальнейшем развитии существующих систем аварийной сигнализации для достижения повышенной безопасности движения.
В документе WO 2011/157288 описана система для обнаружения мест нахождения, вариантов расписания и продолжительностей нахождения транспортных средств в пути, предназначенная для использования накопленных данных о поездках для оценки переездов со шлагбаумами, например, относящихся к паромному сообщению, с помощью цифровой карты.
Краткое изложение существа изобретения
Одна задача изобретения состоит в том, чтобы предложить новый эффективный способ оценки рисков аварий для движущегося транспортного средства.
Другая задача изобретения состоит в том, чтобы предложить новое эффективное устройство и новую эффективную компьютерную программу для оценки рисков аварий для движущегося транспортного средства.
Дополнительная задача изобретения состоит в том, чтобы предложить способ, устройство и компьютерную программу для достижения повышенной безопасности движущегося транспортного средства.
Дополнительная задача изобретения состоит в том, чтобы предложить способ, устройство и компьютерную программу для достижения устойчивой к внешним воздействиям и надежной оценки рисков столкновений с неподвижными объектами.
Эти задачи решаются с помощью способа оценки рисков аварий для движущегося транспортного средства по п. 1 формулы изобретения.
Один аспект изобретения - это предлагаемый способ оценки рисков аварий для движущегося транспортного средства, включающий в себя этапы, на которых:
- непрерывно осуществляют контроль конфигурации окружающей обстановки, когда упомянутое транспортное средство находится в движении;
- непрерывно определяют рабочие характеристики для транспортного средства;
- непрерывно регистрируют упомянутую конфигурацию окружающей обстановки для создания и выдачи представления о выбираемых характеристиках окружающей обстановки, проходимой транспортным средством; и
- используют упомянутые рабочие характеристики и упомянутое представление как основу для оценки рисков аварий применительно к окружающей обстановке, проходимой транспортным средством.
Сохраняя и неоднократно используя информацию о конфигурациях окружающей обстановки, можно достичь способа оценки рисков столкновений с неподвижными объектами. Таким образом, инновационный способ обеспечивает водителю транспортного средства стойкую к внешним воздействиям систему оповещения и поддержку для принятия решений.
Упомянутая оценка может предусматривать учет конфигураций транспортного средства, делая возможным проведение оценок рисков столкновений на основании конфигураций, характерных для транспортного средства, что приводит к дополнительно повышенной безопасности в соответствии с одним аспектом инновационного способа.
Упомянутые рабочие характеристики могут включать в себя близящиеся траектории движения, следствием чего является выгодная возможность предсказания будущего столкновения с неподвижным объектом и вытекающая отсюда способность водителя транспортного средства принять подходящие меры до вероятного столкновения.
Риски аварий могут быть предоставлены водителю транспортного средства, давая возможность предоставить водителю транспортного средства надлежащую основу для принятия решения о мерах.
Упомянутые выбранные характеристики окружающей обстановки, проходимой транспортным средством, могут включать в себя места нахождения и конфигурации неподвижных объектов в упомянутой окружающей обстановке, что дает возможность предоставить ясное изображение неподвижных объектов в конфигурации окружающей обстановки, которая подразумевает риски столкновений.
Предлагаемый способ прост в воплощении на существующих автомобилях. Программное обеспечение для оценки рисков аварий для движущегося транспортного средства в соответствии с изобретением может быть установлено в блоке управления транспортного средства во время изготовления транспортного средства. Таким образом, покупатель транспортного средства может иметь возможность выбора функции способа как вариант. В альтернативном варианте, программное обеспечение, которое содержит программный код для осуществления инновационного способа оценки рисков аварий для движущегося транспортного средства, может быть установлено в блоке управления транспортного средства в случае модификации на станции обслуживания, и при этом программное обеспечение можно загружать в память в блоке управления. Следовательно, воплощение инновационного способа экономично, в частности, поскольку в соответствии с одним аспектом изобретения не нужно устанавливать на транспортном средстве дополнительные датчики или компоненты.
В настоящее время, необходимую для упомянутых целей аппаратуру можно предусмотреть уже на борту транспортного средства. Следовательно, изобретение представляет собой экономичное решение вышеуказанных проблем.
Программное обеспечение, которое содержит программный код для оценки рисков аварий для движущегося транспортного средства, является простым для обновления или замены. Более того, различные части программного обеспечения, которое содержит программный код для оценки рисков аварий для движущегося транспортного средства, можно заменять независимо друг от друга. Эта модульная конфигурация выгодна с точки зрения перспективы технического обслуживания.
Один аспект изобретения - это предлагаемое устройство для оценки рисков аварий для движущегося транспортного средства, содержащее:
- средства для непрерывного осуществления контроля конфигурации окружающей обстановки, когда упомянутое транспортное средство находится в движении;
- средства для непрерывного определения рабочих характеристик для транспортного средства;
- средства для непрерывной регистрации упомянутой конфигурации окружающей обстановки для создания и выдачи представления о выбираемых характеристиках окружающей обстановки, проходимой транспортным средством; и
- средства для использования упомянутых рабочих характеристик и упомянутого представления как основы для оценки рисков аварий применительно к окружающей обстановке, проходимой транспортным средством.
Упомянутые средства для оценки рисков аварий можно адаптировать к учету конфигураций упомянутого транспортного средства.
Упомянутые рабочие характеристики могут включать в себя близящиеся траектории движения. Упомянутые выбранные характеристики окружающей обстановки, проходимой транспортным средством, могут включать в себя места нахождения и конфигурации неподвижных объектов в упомянутой окружающей обстановке.
Устройство может дополнительно содержать средства для предоставления рисков аварий оператору транспортного средства.
Вышеупомянутые задачи также решаются с помощью транспортного средства, которое оснащено устройством для оценки рисков аварий для движущегося транспортного средства. Транспортное средство может быть грузовым автомобилем, автобусом или легковым автомобилем.
Один аспект изобретения - это предлагаемая компьютерная программа для оценки рисков аварий для движущегося транспортного средства, содержащая программный код, хранимый на считываемом компьютером носителе, для того, чтобы заставить электронный блок управления или другой компьютер, подсоединенный к электронному блоку управления, выполнять этапы по любому из пп. 1-5 формулы изобретения.
Один аспект изобретения - это предлагаемый компьютерный программный продукт, содержащий программный код, хранимый на считываемом компьютером носителе, для выполнения этапов способа по любому из пп. 1-5 формулы изобретения, когда упомянутая компьютерная программа запущена на электронном блоке управления или другом компьютере, подсоединенном к электронному блоку управления.
В одном аспекте изобретения можно использовать датчики, направленные вперед, например, одну или несколько видеокамер и/или фотоаппаратов и/или один или несколько радиолокационных блоков. Это дает возможность неоднократно использовать зарегистрированные и сохраненные данные, генерируемые упомянутыми направленными вперед датчиками, на более поздней стадии, например, когда прицеп транспортного средства проезжает мимо неподвижных объектов, которые уже обнаружены, или когда транспортное средство движется задним ходом.
Таким образом, предлагаемое техническое решение отличается от существующих систем, в которых, например, функцию экстренного торможения можно активировать на основании информации из направленных вперед датчиков в случае, если есть риск столкновения с подвижным или неподвижным объектом, когда упомянутый объект остается в секторе активного обзора направленных вперед датчиков.
Следовательно, изобретение предоставляет выгодную возможность использования заранее зарегистрированной информации о неподвижных объектах в конфигурации окружающей обстановки в ситуациях, когда упомянутые датчики не имеют упомянутых объектов ни в одном из своих секторов обзора.
Дополнительные задачи, преимущества и новые признаки данного изобретения станут очевидными специалисту в данной области техники из нижеследующих подробностей, а также за счет претворения изобретения в жизнь. Несмотря на приводимое ниже описание изобретения, следует понять, что оно не ограничивается описываемыми конкретными подробностями. Специалист в данной области техники, имеющий доступ к приводимым здесь принципам, поймет дополнительные приложения, модификации и возможности внедрения в иных отраслях, находящиеся в рамках объема притязаний изобретения.
Краткое описание чертежей
Для более полного понимания данного изобретения, а также его дополнительных задач и преимуществ, следует прочесть подробное описание, приводимое ниже, в связи с прилагаемыми чертежами, на которых одинаковые позиции употребляются для сходных элементов на различных чертежах, при этом:
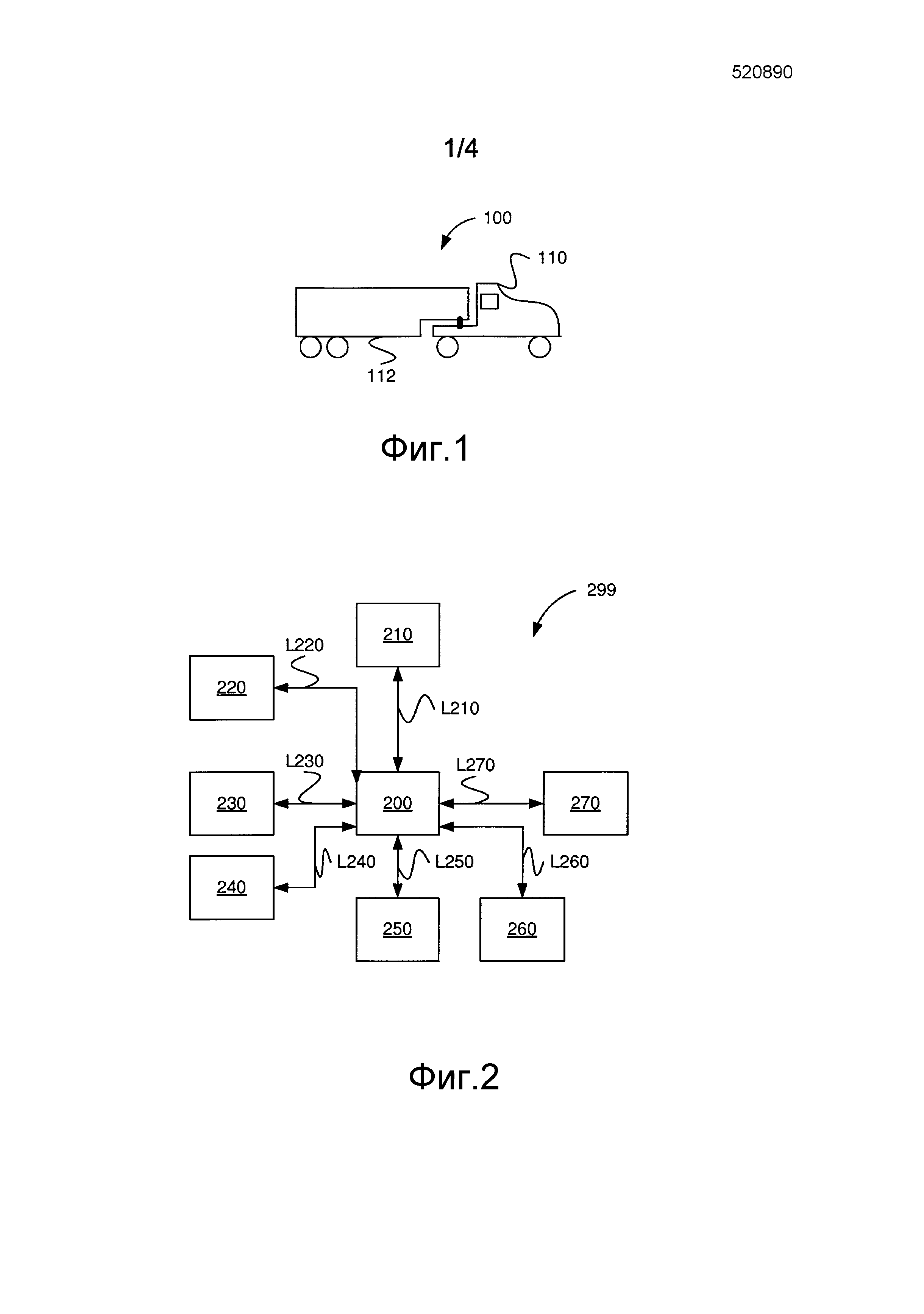
на фиг. 1 схематически проиллюстрировано транспортное средство в соответствии с вариантом осуществления изобретения;
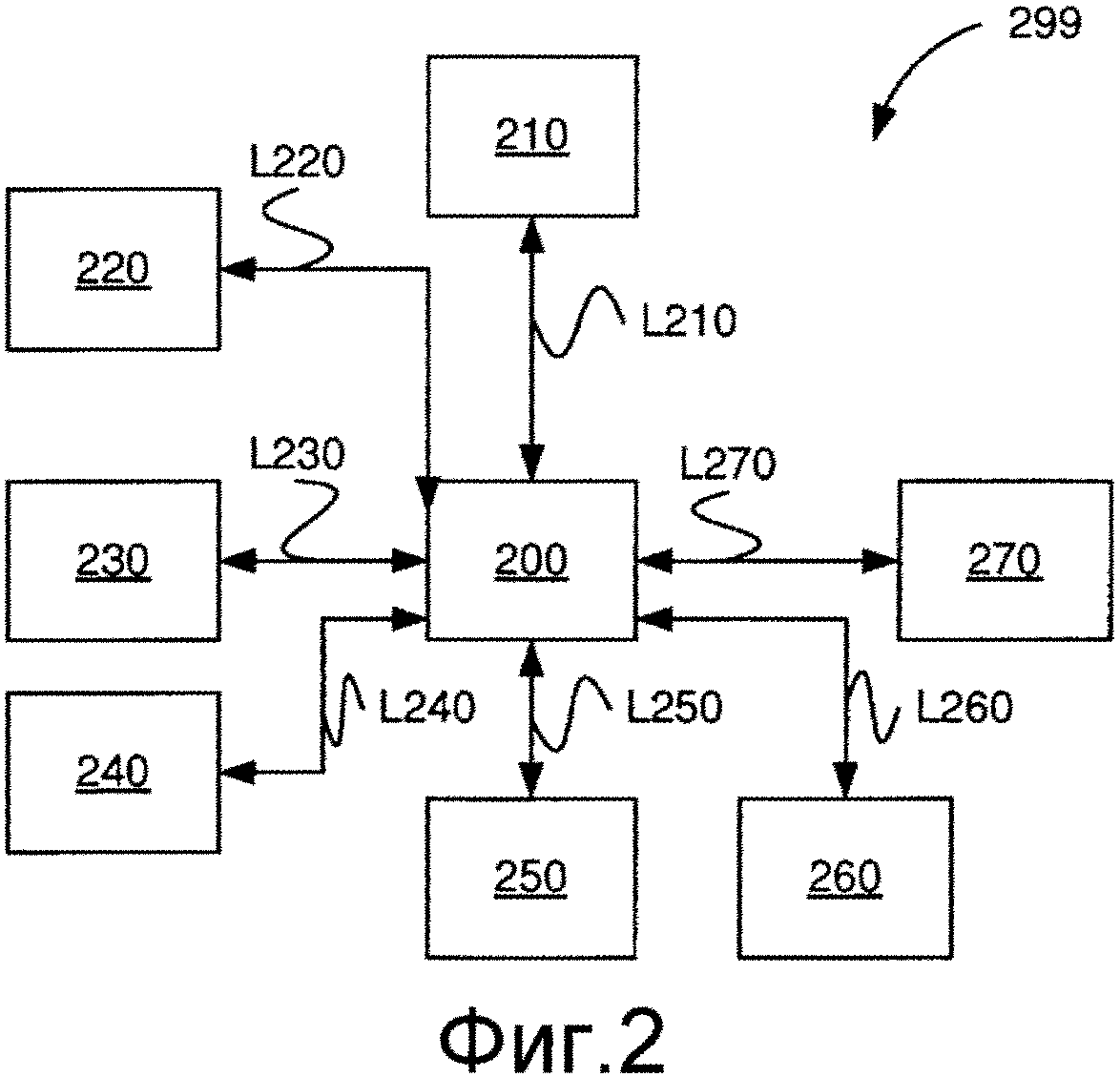
на фиг. 2 схематически проиллюстрирована подсистема для транспортного средства, изображенного на фиг. 1, в соответствии с вариантом осуществления изобретения;
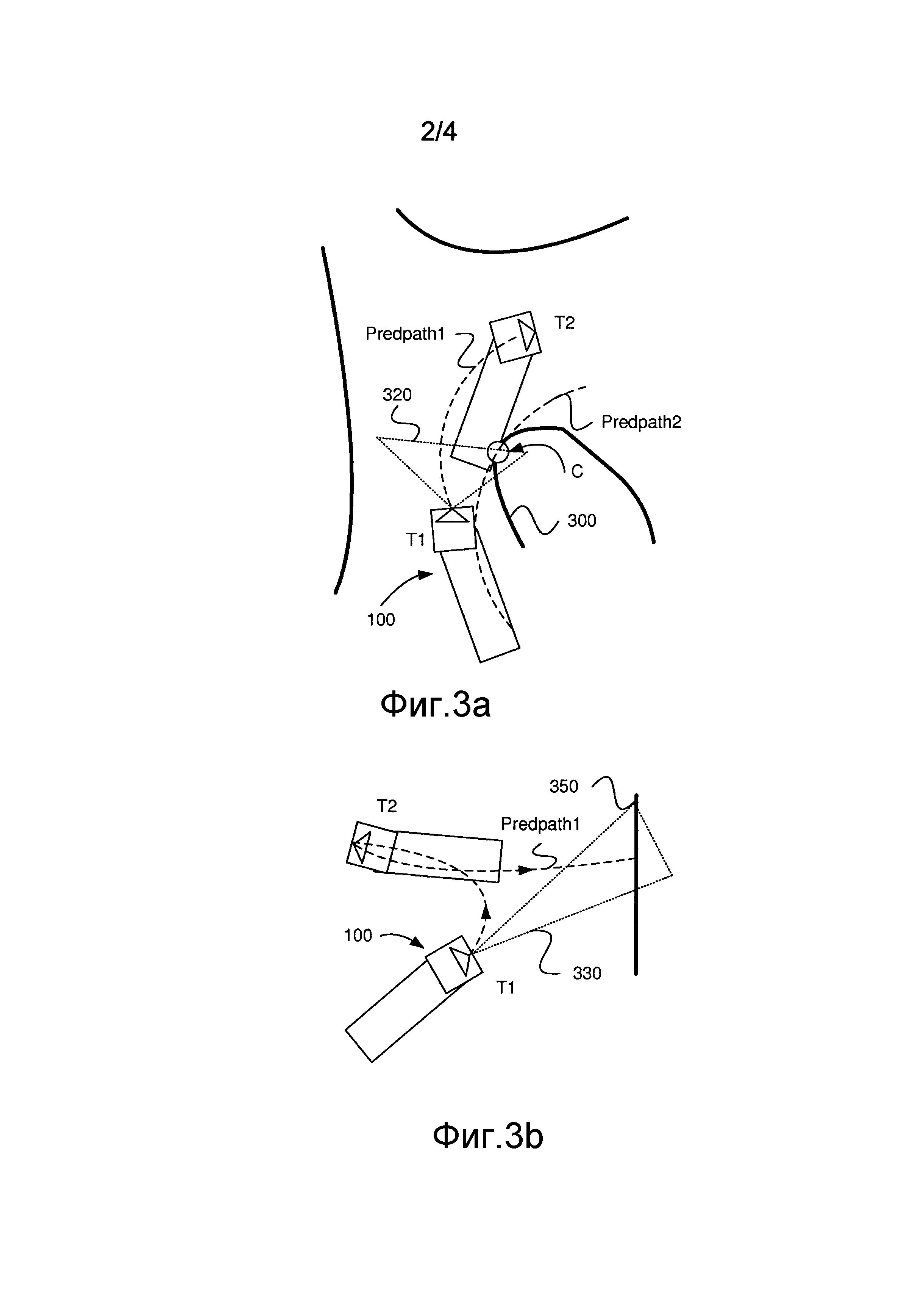
на фиг. 3а схематически проиллюстрирован первый пример ситуации дорожного движения;
на фиг. 3b схематически проиллюстрирован второй пример ситуации дорожного движения;
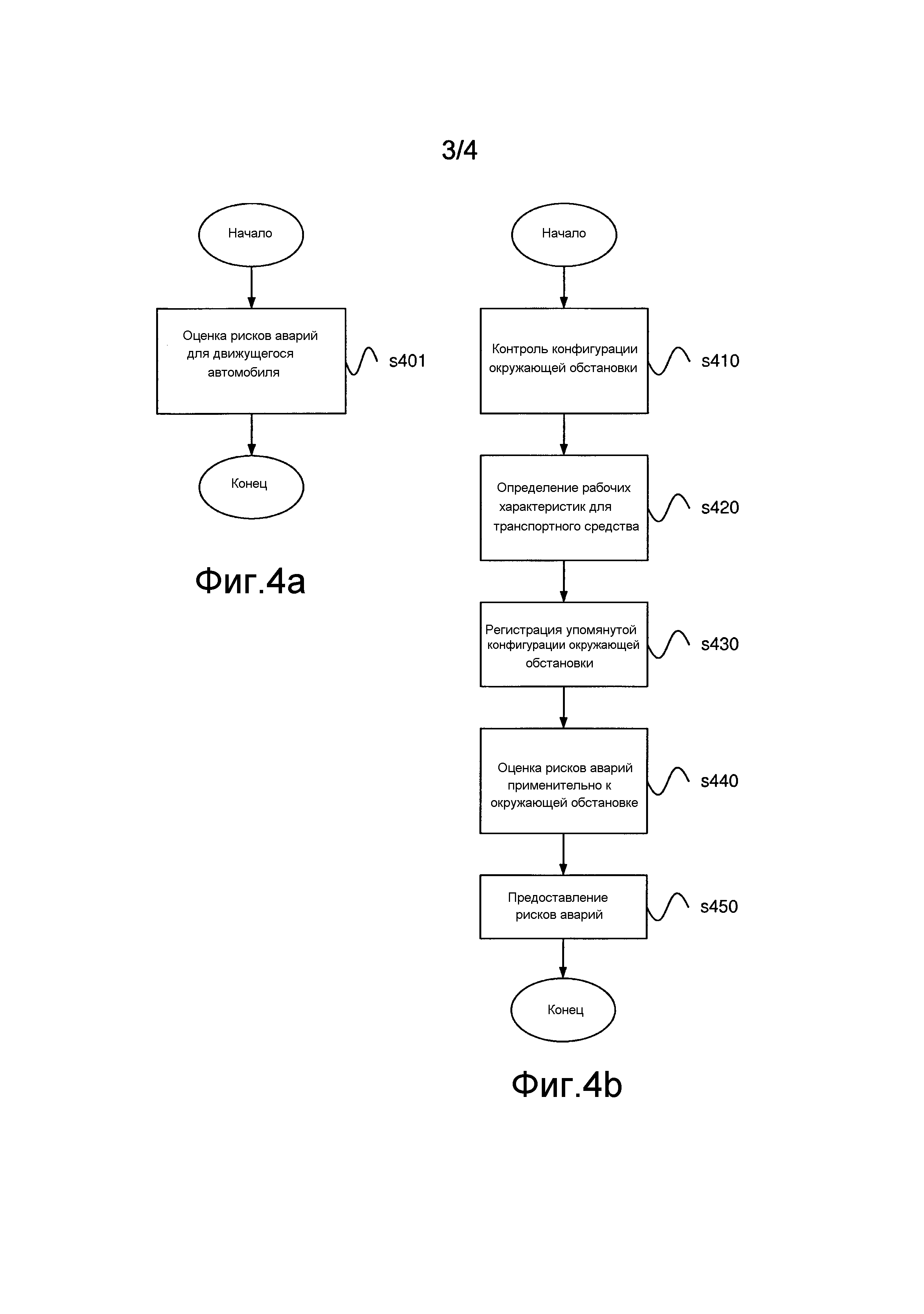
на фиг. 4а представлена условная блок-схема последовательности операций способа в соответствии с вариантом осуществления изобретения;
на фиг. 4b представлена более подробная условная блок-схема последовательности операций способа в соответствии с вариантом осуществления изобретения; и
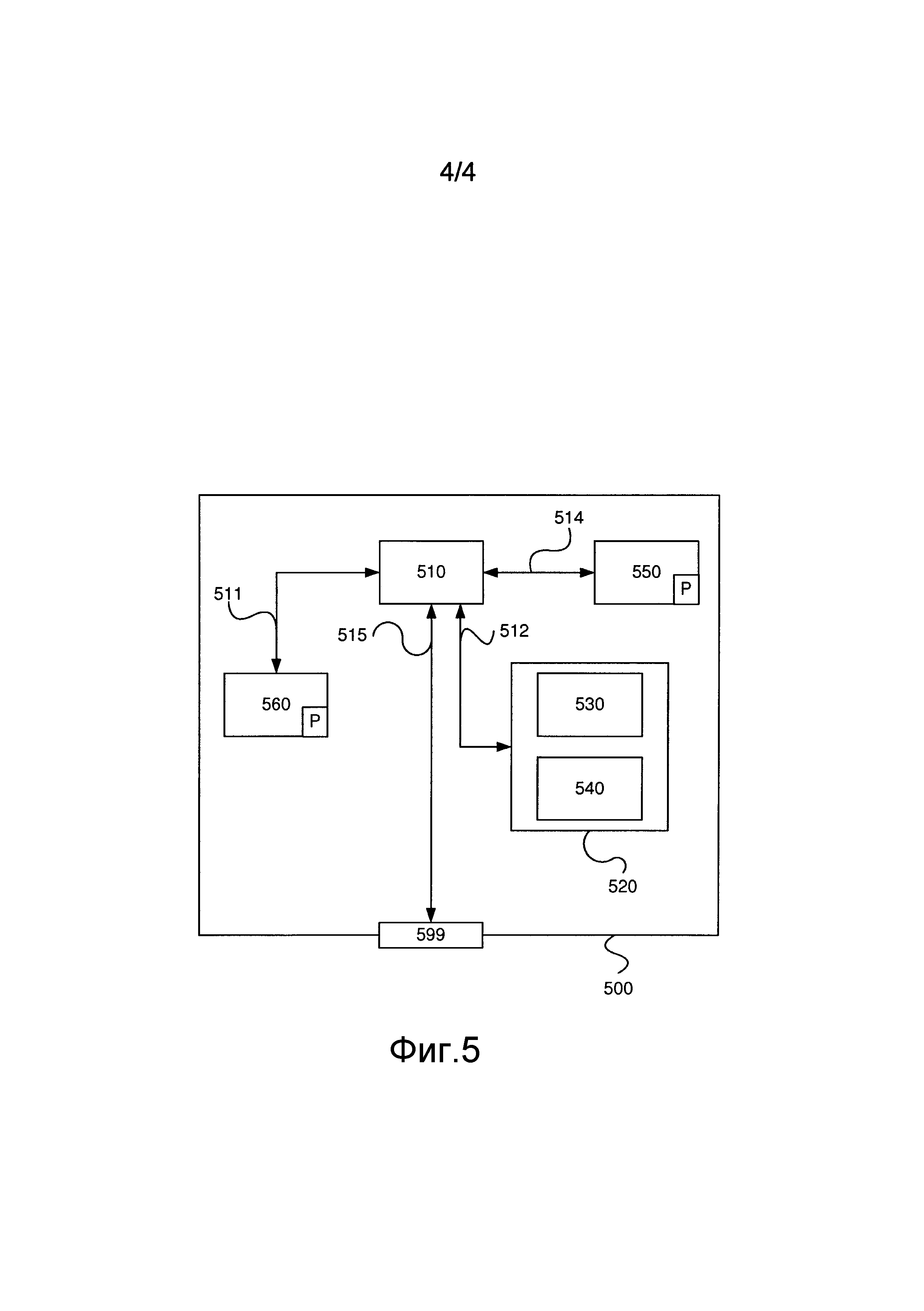
на фиг. 5 схематически проиллюстрирован компьютер в соответствии с вариантом осуществления изобретения.
Подробное описание чертежей
На фиг. 1 изображен вид сбоку транспортного средства 100. Транспортное средство, пример которого приводится здесь, содержит тягач 110 и прицеп 112. Оно может быть автомобилем большой грузоподъемности, например грузовым автомобилем, или автобусом. В альтернативном варианте, оно может быть легковым автомобилем.
Термин «канал» в данном описании относится к каналу связи, который может быть физическим соединением, таким как оптоэлектронная линия, или нефизическим соединением, таким как беспроводное соединение, например радиоканал или микроволновая линия.
На фиг. 1 изображена подсистема 299 транспортного средства 100. Эта подсистема находится в тягаче 110 и содержит первый блок 200 управления.
Первый блок 200 управления выполнен с возможностью связи с первым сенсорным устройством 220 по каналу L220. Первое сенсорное устройство может содержать съемочный блок. Съемочный блок может быть монокамерой. Съемочный блок может быть стереокамерой. Упомянутое первое сенсорное устройство 220 адаптировано к непрерывному генерированию изображений обстановки, окружающей транспортное средство 100. Это устройство может быть адаптировано к генерированию изображений обстановки, окружающей транспортное средство, в реальном масштабе времени. В альтернативном варианте, это устройство адаптировано к прерывистому генерированию изображений обстановки, окружающей транспортное средство. Возможна адаптация этого устройства к непрерывной съемке обстановки, окружающей транспортное средство, как потока видеоданных.
Первое сенсорное устройство 220 может содержать подходящее количество генерирующих изображения блоков, которые могут быть взаимно различными, например, применительно к секторам обзора и другим условиям. В одном примере, упомянутое первое сенсорное устройство содержит первую съемочную камеру с сектором обзора 45 градусов и дальностью до 100 метров, и вторую съемочную камеру с сектором обзора 30 градусов и дальностью до 200 метров. Упомянутые первая и вторая съемочные камеры могут иметь подходящие соответствующие секторы обзора и дальности. Секторы обзора разных генерирующих изображения блоков могут перекрываться полностью или частично.
Упомянутое первое сенсорное устройство 220 адаптировано к непрерывной посылке упомянутых генерируемых изображений в первый блок 200 управления по каналу L220. Упомянутое первое сенсорное устройство адаптировано к непрерывной посылке упомянутого генерируемого потока видеоданных в первый блок управления по каналу L220.
Первый блок 200 управления выполнен с возможностью связи со вторым сенсорным устройством 230 по каналу L230. Упомянутое второе сенсорное устройство может содержать радиолокационный блок. Радиолокационный блок может быть монорадаром. Этот блок может быть стереорадаром. Упомянутое второе сенсорное устройство адаптировано к непрерывному генерированию радиолокационных изображений обстановки, окружающей транспортное средство 100. Это устройство адаптировано к генерированию радиолокационных изображений обстановки, окружающей транспортное средство, в реальном масштабе времени. В альтернативном варианте, упомянутое второе сенсорное устройство адаптировано к прерывистому генерированию радиолокационных изображений обстановки, окружающей транспортное средство.
Второе сенсорное устройство 230 может содержать подходящее количество радиолокационных блоков, которые могут быть взаимно различными, например, применительно к секторам обзора и другим условиям. В одном примере, упомянутое первое сенсорное устройство содержит первый радиолокационный блок с сектором обзора 50 градусов и дальностью до 60 метров, и второй радиолокационный блок с сектором обзора 10 градусов и дальностью до 120 метров. Упомянутые первый и второй радиолокационные блоки могут иметь подходящие соответствующие секторы обзора и дальности. Секторы обзора разных радиолокационных блоков могут перекрываться полностью или частично.
Упомянутое второе сенсорное устройство 230 адаптировано к непрерывной посылке упомянутых генерируемых радиолокационных изображений в первый блок 200 управления по каналу L230.
Первый блок 200 управления адаптирован к приему сигналов, содержащих данные из упомянутого первого сенсорного устройства 220 и упомянутого второго сенсорного устройства 230.
Первый блок 200 управления адаптирован к обработке упомянутых сигналов, принимаемых из упомянутого первого сенсорного устройства 220, с целью обнаружения конфигурации окружающей обстановки, содержащей информацию о местах нахождения и конфигурациях неподвижных объектов. Упомянутые неподвижные объекты могут представлять собой, например, край тротуара или платформу для погрузки товаров. Эти объекты могут быть дорожными знаками, центральными разделительными полосами, зданиями, припаркованными транспортными средствами, и т.д. Упомянутый первый блок управления адаптирован к хранению упомянутых принимаемых изображений и/или упомянутых обнаруженных конфигураций окружающей обстановки в памяти, которой он оснащен.
Первый блок 200 управления адаптирован к обработке упомянутых сигналов, принимаемых из упомянутого второго сенсорного устройства 230, с целью обнаружения конфигурации окружающей обстановки, содержащую информацию о местах нахождения и конфигурациях неподвижных объектов. Упомянутые неподвижные объекты представлять собой, например, край тротуара или платформу для погрузки товаров. Эти объекты могут быть дорожными знаками, центральными разделительными полосами, зданиями, припаркованными транспортными средствами, и т.д. Упомянутый первый блок управления адаптирован к хранению упомянутых принимаемых изображений и/или упомянутых обнаруженных конфигураций окружающей обстановки в памяти, которой он оснащен.
В альтернативном варианте, обработку изображений может проводить упомянутое первое сенсорное устройство 220 и/или упомянутое второе сенсорное устройство 230, и в этом случае любое из них может или оба они могут обнаруживать упомянутую конфигурацию окружающей обстановки и пропускать информацию о ней в первый блок управления по соответствующим каналам L220, L230.
Первый блок 200 управления выполнен с возможностью связи c позиционирующими средствами 240 по каналу L240. Упомянутые позиционирующие средства адаптированы к непрерывному определению преобладающего места нахождения транспортного средства. Они могут содержать приемник системы глобального позиционирования (GPS-приемник). Они могут содержать подходящее гироскопическое устройство. Упомянутые позиционирующие средства адаптированы к непрерывному определению преобладающей ориентации транспортного средства, например, относительно направления на север. Они адаптированы к непрерывной посылке сигналов, содержащих информацию о преобладающем месте нахождения и ориентации транспортного средства в первый блок управления по каналу L240.
Первый блок 200 управления выполнен с возможностью связи c третьим сенсорным устройством 250 по каналу L250. Упомянутое третье сенсорное устройство адаптировано к непрерывному определению некоторого количества различных параметров транспортного средства, и в это количество могут входить преобладающий угол рыскания транспортного средства, преобладающая угловая скорость рыскания, преобладающий угол поворота руля, преобладающая скорость транспортного средства, преобладающая скорость колес, и т.д. Первый блок управления может использовать упомянутые параметры транспортного средства для расчета рабочих характеристик транспортного средства. Таким образом, первый блок управления адаптирован к расчету близящейся траектории движения для транспортного средства. Следовательно, можно прогнозировать вероятную близящуюся траекторию движения. Упомянутый первый блок управления адаптирован к расчету упомянутых рабочих характеристик на основании, по меньшей мере, одного параметра транспортного средства.
Первый блок 200 управления выполнен с возможностью связи c блоком 260 связи по каналу L260. Упомянутый блок связи может содержать подходящий пользовательский интерфейс, который позволяет оператору транспортного средства вводить, например, информацию о конфигурациях транспортного средства, которая может содержать информацию о габаритной длине транспортного средства, типе прицепа 112, любом свесе, и т.д. В уместных случаях, оператор транспортного средства может обновлять информацию о конфигурациях транспортного средства, делая возможным принятие надлежащих оценок рисков аварий для движущегося транспортного средства. Упомянутый блок связи может содержать набор кнопок, экран для визуального контроля, сенсорный экран или другие подходящие средства взаимодействия с первым блоком управления. В одном примере, необходимую информацию о конфигурациях транспортного средства заранее сохраняют в памяти первого блока управления.
Первый блок 200 управления выполнен с возможностью связи со средствами 270 обратной связи по каналу L270. Упомянутые средства обратной связи могут быть выполнены как единое целое с упомянутым блоком 260 связи или могут составлять отдельный блок. Они могут содержать экран для визуального контроля, громкоговорители или светоизлучающие устройства. Первый блок управления адаптирован к оповещению оператора транспортного средства о существовании риска аварии для движущегося транспортного средства.
В одном варианте осуществления упомянутые средства 270 обратной связи могут быть адаптированы к предоставлению - с помощью упомянутого экрана для визуального контроля - изображения, отображающего транспортное средство и иллюстрирующего область транспортного средства, в которой существует риск столкновения с неподвижным объектом.
В одном варианте осуществления упомянутые средства 270 обратной связи могут быть адаптированы к подаче - с помощью упомянутых громкоговорителей - слышимого сигнала, когда есть риск столкновения с неподвижным объектом. Упомянутый слышимый сигнал может содержать синтезированную речь либо непрерывный или прерывистый звуковой сигнал.
В одном варианте осуществления, упомянутые средства 270 обратной связи могут быть адаптированы к подаче непрерывного или прерывистого светового сигнала, например, с помощью лампочки или светоизлучающего диода (СИДа), когда есть риск столкновения с неподвижным объектом.
Второй блок 210 управления выполнен с возможностью связи c первым блоком 200 управления по каналу L210. Упомянутый второй блок управления может быть соединен с возможностью разъединения с первым блоком управления. Он может быть внешним для транспортного средства. Он может быть адаптирован к проведению этапов инновационного способа в соответствии с изобретением. Его можно использовать для загрузки программного обеспечения в первый блок управления, в частности - для загрузки программного обеспечения с целью осуществления инновационного способа. В альтернативном варианте, второй блок управления может быть выполнен с возможностью связи с первым блоком управления через внутреннюю сеть на борту транспортного средства. Он может быть адаптирован к выполнению функций, по существу, аналогичных первому блоку управления, например, к использованию принимаемых сигналов, содержащих изображения окружающей обстановки (например, видео- или радиолокационных изображений), которые содержат информацию о конфигурациях окружающей обстановки, информацию, касающуюся места нахождения и ориентации транспортного средства, а также рабочих характеристик как основы для оценки рисков аварий для движущегося транспортного средства.
На фиг. 3а схематически проиллюстрирован первый пример ситуации дорожного движения. Здесь транспортное средство 100 показано в первый момент T1 времени и второй момент T2 времени. Водитель транспортного средства в данном случае намеревается выполнить маневр поворота вправо согласно чертежу, чтобы обогнуть возвышающийся бордюр 300 проезжей части, который можно идентифицировать как неподвижный объект, например край тротуара.
До наступления первого момента T1 времени, осуществляют непрерывный контроль конфигурации окружающей обстановки, когда транспортное средство находится в движении, с помощью упомянутого первого сенсорного устройства 220 и/или упомянутого второго сенсорного устройства 230. Проиллюстрирован сектор 320 обзора для первого сенсорного устройства в некоторый заданный момент времени. До наступления первого момента T1 времени, непрерывно определяют рабочие характеристики для транспортного средства. До наступления первого момента T1 времени, непрерывно регистрируют упомянутую конфигурацию окружающей обстановки для создания и выдачи представления о выбираемых характеристиках окружающей обстановки, проходимой транспортным средством.
В первый момент T1 времени, первый блок управления проводит расчет прогнозируемой траектории движения, Predpath1, для транспортного средства на основании вышеописанных параметров транспортного средства. Кроме того, непрерывно рассчитывают риск столкновения с неподвижным объектом 300, между прочим - на основании конфигураций транспортного средства, прогнозируемых траекторий движения и конфигураций окружающей обстановки. Риск столкновения с неподвижным объектом можно рассчитывать непрерывно после наступления момента Т1 времени и до наступления момента Т2 времени.
В этом примере первый блок 200 управления определяет, что водитель транспортного средства, видимо, выполняет маневр поворота, который повлечет за собой риск столкновения области C транспортного средства с неподвижным объектом 300, о чем водителя можно автоматически оповестить с помощью средств 270 обратной связи до наступления момента T2 времени. Это позволяет водителю избежать упомянутого возможного столкновения с помощью подходящего маневра, например, посредством дальнейшего поворота руля во время маневра поворота и/или посредством торможения.
В этом контексте предыстория изображений, т.е. обработанные изображения, генерированные упомянутым первым сенсорным устройством 220 и/или упомянутым вторым сенсорным устройством 230, служит основой для расчета риска столкновения с неподвижным объектом, который водитель уже миновал. В одном аспекте изобретения, обработанные изображения, генерированные упомянутым первым сенсорным устройством и/или упомянутым вторым сенсорным устройством, можно сохранять в памяти первого блока управления и использовать на более поздней стадии для оценки риска столкновения с неподвижным объектом в некоторой конфигурации окружающей обстановки. Знание конфигураций транспортного средства делает возможным расчет прогнозируемой траектории движения, Predpath2, для критических частей транспортного средства 100. Эта прогнозируемая траектория движения, Predpath2, определяется в этом примере как находящаяся с «неправильной» стороны неподвижного объекта 300, что дает возможность определить риск будущего столкновения (в момент Т2 времени).
На фиг. 3b схематически проиллюстрирован второй пример ситуации дорожного движения. Здесь транспортное средство 100 показано в первый момент T1 времени и второй момент T2 времени. Водитель транспортного средства в данном случае намеревается совершить поворот и двигаться задним ходом к неподвижному объекту 350 в виде платформы для погрузки товаров.
До наступления первого момента T1 времени, когда транспортное средство находится в движении, осуществляют непрерывный контроль конфигурации окружающей обстановки с помощью упомянутого первого сенсорного устройства 220 и/или упомянутого второго сенсорного устройства 230. Проиллюстрирован сектор 320 обзора для второго сенсорного устройства в некоторый заданный момент времени. До наступления первого момента T1 времени, непрерывно определяют рабочие характеристики для транспортного средства. До наступления первого момента T1 времени, непрерывно регистрируют упомянутую конфигурацию окружающей обстановки для создания и выдачи представления о выбираемых характеристиках окружающей обстановки, проходимой транспортным средством.
Во второй момент T2 времени, первый блок управления проводит расчет прогнозируемой траектории движения, Predpath1, для транспортного средства на основании вышеописанных параметров транспортного средства. Кроме того, непрерывно рассчитывают риск столкновения с неподвижным объектом 350, между прочим - на основании конфигураций транспортного средства, прогнозируемых траекторий движения и конфигураций окружающей обстановки. После наступления момента Т2 времени, непрерывно определяют рабочие характеристики для транспортного средства. Риск столкновения с неподвижным объектом можно рассчитывать непрерывно после поступления момента Т2 времени.
В этом примере первый блок управления определяет, что водитель транспортного средства, видимо, выполняет маневр движения задним ходом, который повлечет за собой риск столкновения с неподвижным объектом 350, о чем водителя можно автоматически оповестить с помощью средств 270 обратной связи до того, как произойдет возможное столкновение. Таким образом, водитель транспортного средства может избежать упомянутого возможного столкновения с помощью подходящего маневра, например, посредством медленного заднего хода и поддержания приемлемого обзора сзади.
В этом контексте предыстория изображений, т.е. обработанные изображения, генерированные упомянутым первым сенсорным устройством 220 и/или упомянутым вторым сенсорным устройством 230, служит основой для расчета риска столкновения с неподвижным объектом, который водитель уже миновал. В одном аспекте изобретения обработанные изображения, генерированные упомянутым первым сенсорным устройством и/или упомянутым вторым сенсорным устройством, можно сохранять в памяти первого блока управления и использовать на более поздней стадии для оценки риска столкновения с неподвижным объектом в некоторой конфигурации окружающей обстановки. Знание конфигураций транспортного средства делает возможным расчет прогнозируемых траекторий движения для критических частей (заднего конца прицепа) транспортного средства.
на фиг. 4а представлена условная блок-схема последовательности операций способа оценки рисков аварий для движущегося транспортного средства в соответствии с вариантом осуществления изобретения. Способ включает в себя первый этап s401, включающий в себя этапы, на которых:
- непрерывно осуществляют контроль конфигурации окружающей обстановки, когда транспортное средство находится в движении;
- непрерывно определяют рабочие характеристики для транспортного средства;
- непрерывно регистрируют упомянутую конфигурацию окружающей обстановки для создания и выдачи представления о выбираемых характеристиках окружающей обстановки, проходимой транспортным средством; и
- используют упомянутые рабочие характеристики и упомянутое представление как основу для оценки рисков аварий применительно к окружающей обстановке, проходимой транспортным средством. После этапа s401 способ заканчивается.
На фиг.4b представлена более подробная условная блок-схема последовательности операций способа оценки рисков аварий для движущегося транспортного средства в соответствии с вариантом осуществления изобретения.
Способ включает в себя первый этап s410, являющийся этапом, на котором непрерывно осуществляют контроль конфигурации окружающей обстановки, когда транспортное средство находится в движении. Это можно сделать с помощью первого сенсорного устройства 220 и/или второго сенсорного устройства 230. За этапом s410 следует этап s420.
Этап s420 способа является этапом, на котором непрерывно определяют рабочие характеристики для транспортного средства. Это можно сделать с помощью упомянутого позиционирующего средства 240 и упомянутого третьего сенсорного средства 250. За этапом s420 следует этап s430.
Этап s430 способа является этапом, на котором непрерывно регистрируют упомянутую конфигурацию окружающей обстановки для создания и выдачи представления о выбираемых характеристиках окружающей обстановки, проходимой транспортным средством. Этап s430 может включать в себя обработку изображений упомянутой контролируемой конфигурации окружающей обстановки и сохранение их в памяти. Упомянутые выбираемые характеристики могут относиться к неподвижным объектам, таким как дорожные знаки и края тротуаров. Их можно выбирать вручную с помощью блока 260 связи или заранее запоминать в памяти в блоке 200 управления. За этапом s430 следует этап s440.
Этап s440 способа является этапом, на котором используют упомянутые рабочие характеристики и упомянутое представление как основу для оценки рисков аварий применительно к окружающей обстановке, проходимой транспортным средством. За этапом s440 следует этап s450.
Этап s450 способа является этапом, на котором предоставляют оператору транспортного средства риски аварий с помощью упомянутых средств 270 обратной связи. После этапа s450 способ заканчивается.
На фиг. 5 представлен пример одной версии устройства 500. Блоки 200 и 210 управления, описанные со ссылками на фиг. 2, могут в одной версии представлять собой устройство 500. Устройство 500 содержит энергонезависимую память 520, блок 510 обработки данных и память 550 чтения-записи. Энергонезависимая память 520 имеет первый запоминающий элемент 530, в котором хранится компьютерная программа, например, операционная система, для управления функционированием устройства 500. Устройство 500 дополнительно содержит контроллер шин, последовательный порт связи, средства ввода-вывода, аналого-цифровой преобразователь, блок ввода и передачи времени и данных, счетчик событий и контроллер прерывания (не показаны). Энергонезависимая память 520 также имеет второй запоминающий элемент 540.
Предлагаемая компьютерная программа P содержит подпрограммы для проводимой в соответствии с инновационным способом оценки рисков аварий для транспортного средства 100, когда оно находится в движении.
Программа P содержит подпрограммы для непрерывного контроля конфигурации окружающей обстановки, когда упомянутое транспортное средство находится в движении. Она содержит подпрограммы для непрерывного определения рабочих характеристик транспортного средства. Она содержит подпрограммы для непрерывной регистрации упомянутой конфигурации окружающей обстановки для создания и выдачи представления о выбираемых характеристиках окружающей обстановки, проходимой транспортным средством. Она содержит подпрограммы для использования упомянутых рабочих характеристик и упомянутого представления как основы для оценки рисков аварий, связанной с окружающей обстановкой, проходимой транспортным средством.
Программа P содержит подпрограммы для проведения упомянутых оценок на основании конфигураций транспортного средства. Она содержит подпрограммы для расчета будущих траекторий движения транспортного средства. Она содержит подпрограммы для предоставления рисков аварий оператору транспортного средства. Она содержит подпрограммы для проведения упомянутых оценок на основании информации о местах нахождения и конфигурациях неподвижных объектов в упомянутой окружающей обстановке.
Программу P можно хранить в той форме, в которой ее исполняют, или в сжатой форме в памяти 560 и/или в памяти 550 чтения-записи.
Если предписывается, чтобы блок 510 обработки данных выполнял определенную функцию, это означает, что он проводит определенную часть программы, хранимой в памяти 560, или определенную часть программы, хранимой в памяти 550 чтения-записи.
Устройство 510 обработки данных может осуществлять связь с портом 599 данных посредством шины 515 данных. Энергонезависимая память 520 предназначена для связи с блоком 510 обработки данных посредством шины 512 данных. Отдельная память 560 предназначена для осуществления связи с блоком обработки данных посредством шины 511 данных. Память 550 чтения-записи выполнена с возможностью связи с блоком обработки данных посредством шины 514 данных. Каналы L210, L220, L230, L240, L250, L260 и L270 могут быть соединены, например, с портом данных (см. фиг. 2).
Когда происходит прием данных в порте 599 данных, они временно сохраняются во втором запоминающем элементе 540. Когда введенные данные временно сохранены, блок 510 обработки данных будет подготовлен к проведению исполнения кода, как описано выше.
В памяти 560 можно хранить электронную карту. Ситуацию транспортного средства в контексте места нахождения и ориентации можно определять на основании информации, определяемой за счет использования упомянутых позиционирующих средств и/или упомянутого третьего сенсорного устройства.
Информацию о параметрах транспортного средства и конфигурациях транспортного средства можно хранить в памяти 560 и можно обновлять вручную с помощью упомянутого блока 260 связи, что может иметь место, например, во время сочленения прицепа 112 с тягачом 110.
В одной версии сигналы, принимаемые в порте 599 данных, содержат информацию о конфигурации окружающей обстановки. Упомянутые сигналы могут быть изображениями, генерированными первым сенсорным устройством 220 и/или вторым сенсорным устройством 230. Информацию о конфигурациях окружающей обстановки можно сохранять подходящими способами в первом блоке 200 управления. В одной версии, изображения, генерированные первым сенсорным устройством и/или вторым сенсорным устройством, хранятся в течение одной минуты. В одной версии, изображения, генерированные первым сенсорным устройством и/или вторым сенсорным устройством, хранятся в течение пяти минут. В одной версии, изображения, генерированные первым сенсорным устройством и/или вторым сенсорным устройством, хранятся в течение подходящего периода времени, например, 10 секунд, 30 секунд или 10 минут. В соответствии с одним аспектом изобретения, упомянутые сохраненные изображения могут служить основой для оценки рисков столкновения.
В одной версии сигналы, принимаемые в порте 599 данных, содержат информацию об угле рыскания, угловой скорости рыскания, угле поворота руля, скорости транспортного средства, скорости колес, скорости и ускорении транспортного средства.
В одной версии, сигналы, принимаемые в порте 599 данных, содержат информацию о местах нахождения, определяемых позиционирующими средствами 240.
В соответствии с инновационным способом, сигналы, принимаемые в порте 599 данных, могут быть использованы устройством 500 для оценки рисков аварий для движущегося транспортного средства.
Устройство 500 может воплощать части описанных здесь способов с помощью блока 510 обработки данных, который исполняет программу, хранимую в памяти 560 или памяти 550 чтения-записи. Когда устройство 500 исполняет программу, выполняются описанные здесь способы.
Вышеизложенное описание предпочтительных вариантов осуществления данного изобретения представлено в иллюстративных и описательных целях. Его не следует считать ни исключительным, ни ограничивающим изобретение описанными вариантами. Многие модификации и изменения будут самоочевидны специалисту в данной области техники. Приведенные варианты осуществления выбраны и описаны, чтобы лучше объяснить принципы изобретения и их приложения на практике, чтобы вследствие этого обеспечить специалисту в данной области возможность понять изобретение для различных вариантов осуществления и с различными модификациями, приемлемыми для целевого применения.
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства
Кровать с изменяемыми размерами
Устройство для приведения в действие системы управления уровнем подвески в транспортном средстве
Инструментальный отсек и узел панели, предназначенный для него
Устройство для охлаждения рециркулирующих выхлопных газов двигателя внутреннего сгорания
Устройство для расцепления привода
Конструкция и способ для демпфирования перемещения поршня
Способ и устройство для изменения восприятия рулевого управления в механизме рулевого управления транспортного средства, а также транспортное средство, содержащее такое устройство
Модуль для системы управления транспортным средством
Модуль для определения опорных значений для системы управления транспортным средством
Способ и модуль для управления скоростью транспортного средства

