Результат интеллектуальной деятельности: СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА
Вид РИД
Изобретение
Изобретение относится к области комплексных измерений и может быть использовано для контроля динамической балансировки лопастей несущего винта (НВ) и рулевого винта (РВ) вертолета.
На современных вертолетах предусматривается оснащение штатными безынерционными датчиками виброускорений, имеющих три взаимно перпендикулярные в пространстве оси чувствительности. Один из таких датчиков можно установить (и на новых типах вертолетов устанавливается) в непосредственной близости вала и втулки несущего винта. Другой датчик такого же типа следует установить (и на новых типах вертолетов устанавливается) вблизи вала и втулки рулевого винта. Тогда при использовании измерений виброускорений этих датчиков можно воссоздать вектор действующих вибрационных сил в месте установки датчика и направление этого вектора в трехмерном пространстве. Такой подход важен при оценивании динамической балансировки несущего и рулевого винтов, т.к. лопасти несущего и рулевого винтов закрепляются к втулке винта с помощью трех шарниров: вертикального, горизонтального и осевого. Дефекты и разрегулировки этих шарниров в большинстве случаев становятся причиной разбалансировки отдельной лопасти и винта в целом. Разбалансировку винта могут вызвать и определенные механические повреждения или отклонения в геометрических размерах и распределении масс отдельной лопасти или лопастей винта. Изменение модуля вектора вибрационных ускорений или его направления в трехмерном пространстве будет свидетельствовать об изменении вектора возмущающих сил, т.е. о появлении дополнительных сил и их моментов, вызывающих разбалансировку отдельных лопастей при их движении в пространстве.
Для того, чтобы лопасти несущего и рулевого винтов в характерных для них условиях динамического нагружения работали нормально, не вызывая заметной вибрации вертолета, они должны быть правильно отбалансированы. Для контроля балансировки лопастей несущего винта известен способ определения дисбаланса несущего винта вертолета, заключающийся в измерении величины и фазы вибраций фюзеляжа вертолета, от дисбаланса и пробного дисбаланса винта, путем установки на лопасти специальных грузов, вычисления дисбаланса винта. Для определения дисбаланса используются показания вертикальных вибродатчиков - патент США №3945256, 1976 г. При таком способе сигнал от весового дисбаланса на несущем винте формируется с помощью разности показаний вертикальных вибродатчиков, установленных с двух сторон от оси вала винта на одинаковом расстоянии от нее. Если центр масс вертолета расположен со смещением по отношению к оси вала, то сигнал от весового дисбаланса формируется с погрешностью, что снижает точность определения дисбаланса несущего винта. Кроме того, требуются дополнительные трудозатраты на установку и снятие на лопасти НВ дополнительных дисбалансирующих грузов.
Наиболее близким аналогом является реализация способа контроля в устройстве для динамической балансировки несущего винта вертолета - патент РФ №2441807, кл. В64С 27/04, 2010. Устройство включает в себя датчик виброускорения и узел обработки сигналов этого датчика. Данный узел представляет собой микропроцессор, который связывает сигнал виброускорения с отметкой первой лопасти и затем выделяет в сигнале основную гармонику частоты оборота винта. Блок анализа разбалансировки по амплитуде этой гармоники и фазе относительно отметки первой лопасти определяет точку дисбаланса на несущем винте. При правильной балансировке - амплитуда сигнала будет минимальна, увеличение амплитуды свидетельствует о разбалансировке винта, либо несоконусности лопастей.
Однако способ, реализованный в устройстве не учитывает тот факт, что силы и моменты сил, действующие на лопасти винта и вызывающие эффект разбалансировки, могут вызывать вибрации другой частоты, отличной от базовой частоты вращения соответствующего винта. При взаимодействии внутри какой-либо механической системы сил с разными частотами возникает эффект модуляции, что приводит к появлению в спектре вибрационного сигнала новых частот. Таким образом, анализа только первой гармоники от частоты вращения винта при оценивании соконусности и балансировки винтов вертолета недостаточно. Необходимо также и решение задачи спектрального анализа в другой постановке с определением других базовых частот и их гармоник, отличных от частоты вращения соответствующего винта.
Для определения дефектной лопасти с целью оценивания степени ее разбалансировки необходимо наличие информации об азимутальном положении каждой лопасти винта. Данная задача в ближайшем аналоге решается путем установки однострочной видеокамеры, фокус которой направлен на законцовки лопастей, что позволяет определить азимутальное и угловое положение (угол взмаха) каждой лопасти с точностью не хуже одного градуса. В дальнейшем производится синхронная обработка видеоинформации законцовок лопастей и параметрической информации виброускорения от датчика вибрации.
Целью настоящего изобретения является создание способа, обеспечивающего регулярный (в каждом полете) контроль сбалансированности как несущего и рулевого винтов вертолета в целом, так и отдельных лопастей, обеспечивающего высокий уровень достоверности результатов контроля и не требующего установки дополнительных (кроме штатных) датчиков информации и приспособлений.
Указанный результат достигается тем, что способ контроля динамической балансировки лопастей несущего и рулевого винтов вертолета включает проведение метрологической экспертизы по оцениванию достоверности поступающих от датчиков и систем измерений сигналов, характеризующих состояние балансировки лопастей винтов вертолета, с выбраковкой аномальных выбросов в последовательности измерений сигналов, имеющей как стационарный, так и динамический характер; накопление обучающих массивов измерений для контроля динамической балансировки лопастей винтов по результатам первого контрольного полета вертолета на режимах висения вертолета на высотах вне влияния эффекта экрана земли без разворотов вертолета в горизонтальной плоскости, при условии, что балансировка лопастей винтов находится в допустимых пределах; накопление обучающих массивов измерений для контроля динамической балансировки лопастей винтов по результатам первого контрольного полета вертолета на различных по скоростям и высотам режимах установившегося прямолинейного горизонтального полета, при условии, что балансировка лопастей винтов находится в допустимых пределах; формирование индивидуальных допусковых границ параметров сбалансированности лопастей винтов на основе обучающих массивов измерений по результатам всех контролируемых режимов полета; измерение текущих параметров сигналов, характеризующих состояние балансировки лопастей винтов вертолета; определение текущего состояния балансировки лопастей винтов вертолета с учетом допусковых границ параметров сбалансированности лопастей винтов; контроль сбалансированности лопастей винтов вертолета в реальном времени на борту и после выполнения полета на наземном устройстве обработки зарегистрированной бортовым устройством регистрации информации каждого полета вертолета с учетом результатов текущего состояния балансировки лопастей винтов за весь период предыдущей эксплуатации вертолета.
В предлагаемом изобретении установка видеокамеры и использование обработки видеосигналов не требуется. Для получения информации об азимутальном положении каждой лопасти достаточна установка на оси вращения соответствующего винта датчика фазы углового положения условной первой лопасти или электромагнитного отметчика момента времени прохождения условной первой лопасти через контрольную точку. В современных отечественных вертолетах предусматривается штатная установка подобных датчиков.
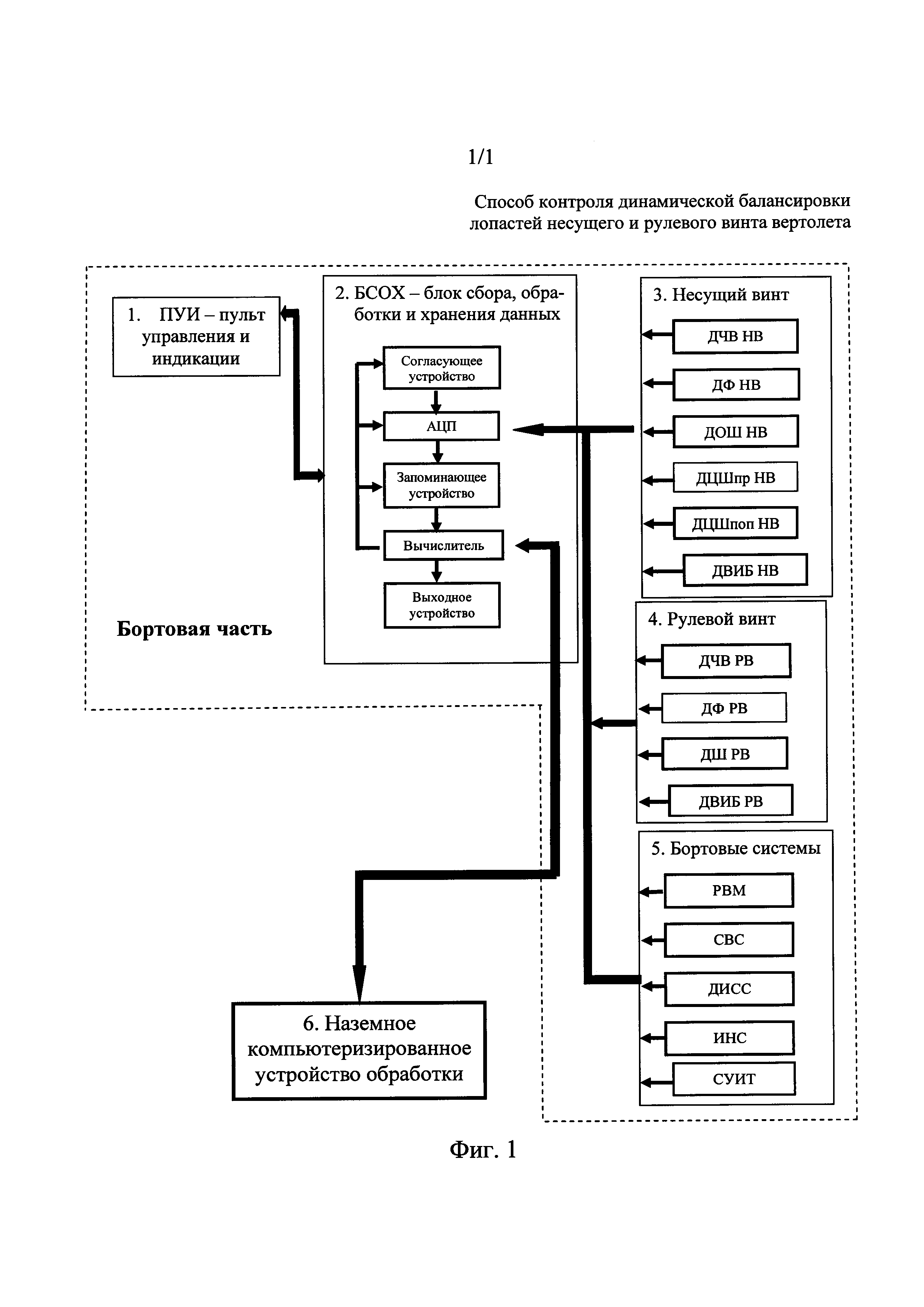
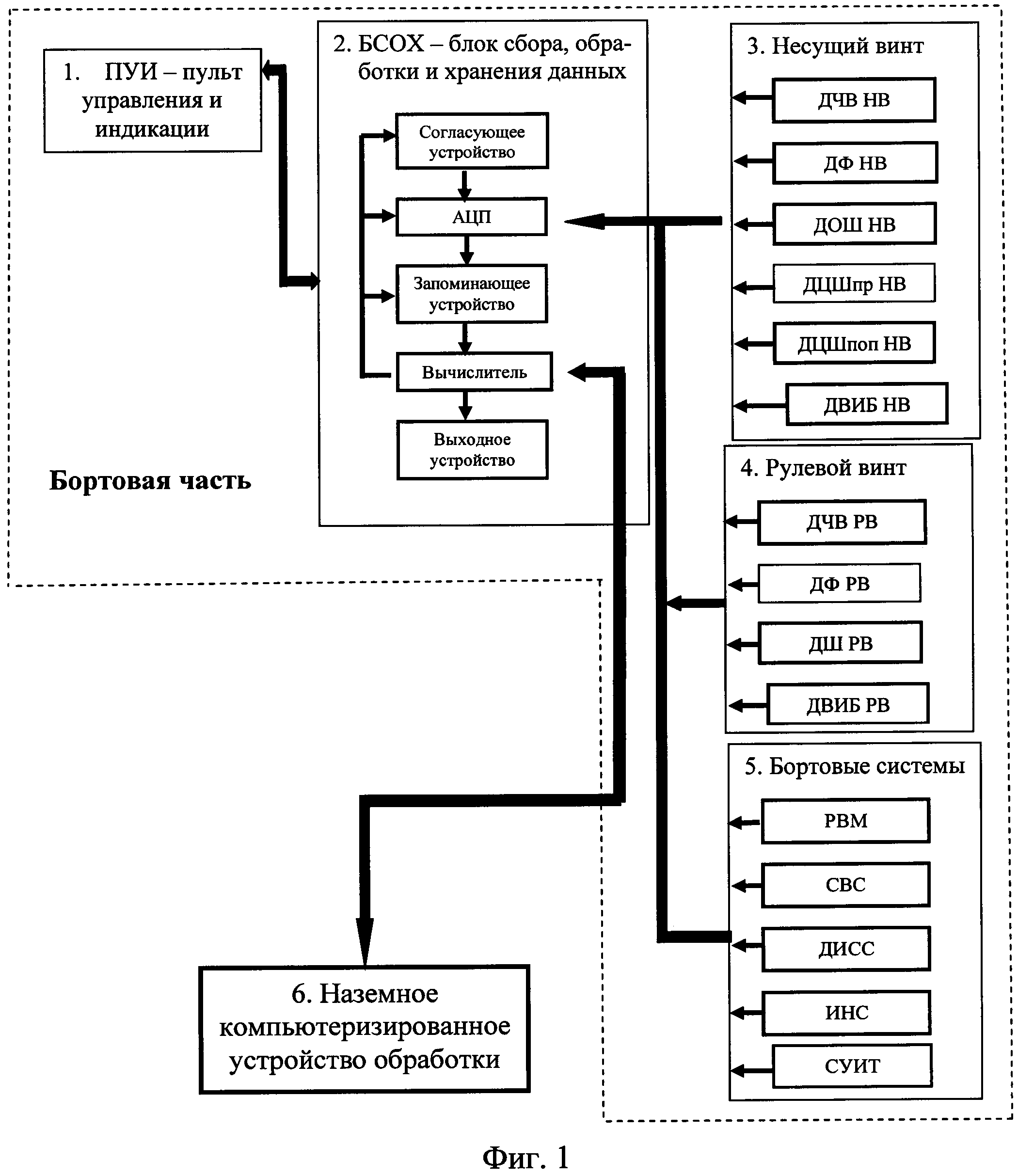
На фиг. 1 представлена блок-схема реализации способа, где:
ДЧВ НВ - датчик частоты вращения несущего винта, ωНВ;
ДФ НВ - датчик фазы несущего винта, φНВ;
ДОШ НВ - датчик угла общего шага лопастей несущего винта, ϕ0;
ДЦШпр НВ - датчик продольного циклического шага лопастей несущего винта, χ;
ДЦШпоп НВ - датчик поперечного циклического шага несущего винта, η;
ДВИБ НВ - датчик вибрации несущего винта (акселерометр) с 3-мя осями чувствительности
 ;
;
ДЧВ РВ - датчик частоты вращения рулевого винта, ωРВ;
ДФ РВ - датчик фазы рулевого винта, φНB;
ДШ РВ - датчик шага лопастей рулевого винта, ϕРВ;
ДВИБ РВ - датчик вибрации рулевого винта (акселерометр) с 3-мя осями чувствительности
 ;
;
РВМ - радиовысотомер, выдает сигналы геометрической высоты НГ;
СВС - система воздушных сигналов, выдает сигналы барометрической высоты НБАР, истинной воздушной скорости VИСТ, бароинерциальной вертикальной скорости VY, истинного угла атаки αИСТ;
ДИСС - доплеровский измеритель путевой скорости и угла сноса, выдает сигналы продольной составляющей путевой скорости WX, боковой составляющей путевой скорости WZ, угла сноса вертолета βСH;
ИНС - инерциальная навигационная система, выдает сигналы углового положения вертолета в пространстве: угла тангажа ϑ, угла крена γ и угловых скоростей;
СУИТ - система управления и измерения топлива, выдает сигнал массы суммарного остатка топлива mТОП и массы вертолета mB.
Перед проведением каких-либо математических операций с измеряемыми сигналами, поступающими от датчиков и измерительных систем вертолета, получаемое после АЦП в каждый момент времени t дискретное значение i-го параметра xi(t) подвергается метрологической экспертизе с целью оценивания достоверности этого значения с выбраковкой аномальных (сбойных) измерений. При этом применяются различные статистические методы и критерии, такие как методы и критерии Р. Фишера, Стьюдента, Граббса, В.Н. Романовского, выявления стационарных и динамических выбросов в последовательности измерений сигналов. Такого рода процедуры реализованы как в бортовом блоке БСОХ (блок сбора, обработки и хранения данных), так и в наземном устройстве обработки.
Дальнейшие действия выполняются только над достоверными значениями измеряемых сигналов. На первом этапе (для необученной системы) после выполнения первого (контрольного) полета вертолета при условии нормальной (эталонной) балансировки лопастей НВ и РВ происходит накопление обучающих массивов измерений на каждом из контролируемых режимов полета (висения и установившегося прямолинейного горизонтального полета). Для контроля динамической балансировки лопастей НВ на режимах висения собирается массив  , включающий в себя следующие измерения:
, включающий в себя следующие измерения:
- значения t текущего времени;
- значения  виброускорения по продольной оси чувствительности от трехосевого датчика, установленного в районе НВ;
виброускорения по продольной оси чувствительности от трехосевого датчика, установленного в районе НВ;
- значения  виброускорения по вертикальной оси чувствительности от трехосевого датчика, установленного в районе НВ;
виброускорения по вертикальной оси чувствительности от трехосевого датчика, установленного в районе НВ;
- значения  виброускорения по поперечной оси чувствительности от трехосевого датчика, установленного в районе НВ;
виброускорения по поперечной оси чувствительности от трехосевого датчика, установленного в районе НВ;
- значения ωНВ угловой скорости вращения НВ;
- значения ϕ0 общего шага НВ;
- значения α угла атаки;
- значения  угла азимутального положения лопасти НВ;
угла азимутального положения лопасти НВ;
- значения χ угла отклонения автомата перекоса в продольной плоскости;
- значения η угла отклонения автомата перекоса в боковой плоскости;
- значения НБАР барометрической высоты полета;
- значения mB массы (веса) вертолета.
Для контроля динамической балансировки лопастей РВ на режимах висения собирается массив  , включающий в себя следующие измерения:
, включающий в себя следующие измерения:
- значения t текущего времени;
- значения  виброускорения по продольной оси чувствительности от трехосевого датчика, установленного в районе РВ;
виброускорения по продольной оси чувствительности от трехосевого датчика, установленного в районе РВ;
- значения  виброускорения по вертикальной оси чувствительности от трехосевого датчика, установленного в районе РВ;
виброускорения по вертикальной оси чувствительности от трехосевого датчика, установленного в районе РВ;
- значения  виброускорения по поперечной оси чувствительности от трехосевого датчика, установленного в районе несущего винта;
виброускорения по поперечной оси чувствительности от трехосевого датчика, установленного в районе несущего винта;
- значения ωРВ угловой скорости вращения РВ;
- значения ϕРВ установочного шага несущего винта;
- значения α угла атаки;
- значения  угла азимутального положения лопасти РВ;
угла азимутального положения лопасти РВ;
- значения НБAP барометрической высоты полета;
- значения mB массы (веса) вертолета;
- значения mТОП массы топлива (веса) в баках вертолета.
Массив  поступает на наземное устройство обработки, которое для каждого момента зарегистрированного в полете времени t висения вертолета выполняет следующие операции:
поступает на наземное устройство обработки, которое для каждого момента зарегистрированного в полете времени t висения вертолета выполняет следующие операции:
- пересчета значения барометрической высоты в эквивалентное ему значение ρ массовой плотности воздуха;
- расчета величины  модуля вектора измерения виброускорения в районе НВ;
модуля вектора измерения виброускорения в районе НВ;
- расчета величины  косинуса пространственного угла
косинуса пространственного угла  , между вектором
, между вектором  и вектором, образуемым единичными ортами по каждой из трех осей этого пространства.
и вектором, образуемым единичными ортами по каждой из трех осей этого пространства.
Далее наземное устройство обработки с использованием процедур математического моделирования и методов статистического обучения многослойных нейронных сетей на основании данных из обучающего массива  , полученного при эталонной динамической балансировке лопастей НВ, формирует операторы
, полученного при эталонной динамической балансировке лопастей НВ, формирует операторы  , описывающие однозначное соответствие между следующими величинами:
, описывающие однозначное соответствие между следующими величинами:
 ;
;
 ;
;
 ;
;
 );
);
 ;
;
Массив  поступает на наземное устройство обработки, которое для каждого момента зарегистрированного в полете времени t висения вертолета выполняет следующие операции:
поступает на наземное устройство обработки, которое для каждого момента зарегистрированного в полете времени t висения вертолета выполняет следующие операции:
- пересчета значения барометрической высоты в эквивалентное ему значение ρ массовой плотности воздуха;
- расчета величины  модуля вектора измерения виброускорения в районе РВ;
модуля вектора измерения виброускорения в районе РВ;
- расчета величины  косинуса пространственного угла
косинуса пространственного угла  , между вектором
, между вектором  и вектором, образуемым единичными ортами по каждой из трех осей этого пространства;
и вектором, образуемым единичными ортами по каждой из трех осей этого пространства;
- расчета величины JY собственного момента инерции вокруг вертикальной строительной оси вертолета на основании значений mB, mТОП.
Далее наземное устройство обработки с использованием процедур математического моделирования и методов статистического обучения многослойных нейронных сетей на основании данных из обучающего массива , полученного при эталонной динамической балансировке лопастей РВ, формирует операторы FXP, FYP, FZP, FMP, FθP, описывающие однозначное соответствие между следующими величинами:
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
На этом первый этап адаптивного контроля на режимах висения (этап обучения системы) заканчивается. Второй этап (этап контроля динамической балансировки винтов на режимах висения) начинается со следующего после контрольного полета и продолжается в каждом полете до выполнения плановых или внеплановых мероприятий по регулированию сбалансированности лопастей одного или обоих винтов вертолета. Для этого перед выполнением следующего после первого этапа полета в бортовой блок БСОХ с наземного устройства обработки транслируются настройки, необходимые для выполнения процедур, соответствующих операторам FXH, FYH, FZH, FMH, FθH и FXP, FYP, FZP, FMP, FθP.
Теперь при каждом выходе вертолета на режим висения в каждый момент времени t для контроля динамической балансировки лопастей НВ на вход бортового блока БСОХ поступают сигналы  ,
,  . Далее БСОХ выполняет следующие операции:
. Далее БСОХ выполняет следующие операции:
- пересчета значения барометрической высоты в эквивалентное ему значение ρ массовой плотности воздуха;
- расчета величины  модуля вектора измерения виброускорения в районе НВ;
модуля вектора измерения виброускорения в районе НВ;
- расчета величины  косинуса пространственного угла
косинуса пространственного угла  , между вектором
, между вектором  и вектором, образуемым единичными ортами по каждой из трех осей этого пространства;
и вектором, образуемым единичными ортами по каждой из трех осей этого пространства;
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора  ;
;
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора  ;
;
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора  ;
;
- вычисления оценки  соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора
соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора  ;
;
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей НВ, путем использования оператора  ;
;
- проведение сравнений:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
Выполнение любого из неравенств указывает на факт нарушения балансировки соответствующей лопасти или лопастей НВ. Допусковые значения  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  определяются на первом этапе адаптивного контроля на наземном устройстве обработки и передаются на бортовой блок БСОХ в начале второго этапа контроля динамической балансировки лопастей НВ.
определяются на первом этапе адаптивного контроля на наземном устройстве обработки и передаются на бортовой блок БСОХ в начале второго этапа контроля динамической балансировки лопастей НВ.
При каждом выходе вертолета на режим висения в каждый момент времени t для контроля динамической балансировки лопастей РВ на вход бортового блока БСОХ поступают сигналы  ,
, ,
,  ,
,  ,
,  , НБAP, mB, mTOП. Далее БСОХ выполняет следующие операции:
, НБAP, mB, mTOП. Далее БСОХ выполняет следующие операции:
- пересчета значения барометрической высоты в эквивалентное ему значение ρ массовой плотности воздуха;
- расчета величины  модуля вектора измерения виброускорения в районе РВ;
модуля вектора измерения виброускорения в районе РВ;
- расчета величины  косинуса пространственного угла
косинуса пространственного угла  , между вектором
, между вектором  и вектором, образуемым единичными ортами по каждой из трех осей этого пространства;
и вектором, образуемым единичными ортами по каждой из трех осей этого пространства;
- расчета величины JY собственного момента инерции вокруг вертикальной строительной оси вертолета на основании значений mB, mТОП,
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора  ;
;
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора  ;
;
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора  ;
;
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора  ;
;
- вычисления оценки  , соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора
, соответствующей эталонной сбалансированности лопастей РВ, путем использования оператора  ;
;
- проведение сравнений
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Выполнение любого из неравенств указывает на факт нарушения балансировки соответствующей лопасти или лопастей РВ. Допусковые значения  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  определяются на первом этапе адаптивного контроля на наземном устройстве обработки и передаются на бортовой блок БСОХ в начале второго этапа контроля динамической балансировки лопастей рулевого винта.
определяются на первом этапе адаптивного контроля на наземном устройстве обработки и передаются на бортовой блок БСОХ в начале второго этапа контроля динамической балансировки лопастей рулевого винта.
Контроль динамической балансировки лопастей НВ и РВ на режимах установившегося прямолинейного горизонтального полета выполняется по аналогичной последовательности операций с измеряемыми сигналами. Отличие заключается во введении дополнительного измерения, а, именно, значения истинной скорости VИСТ и дальнейшем его учете при формировании операторов, описывающих эталонное балансировочное состояние лопастей НВ и РВ на режимах установившегося прямолинейного горизонтального полета вертолета.
При этом на установившихся прямолинейных режимах горизонтального полета силы и моменты сил, действующие на лопасти НВ, зависят от следующих основных параметров динамики вертолета:
- угловой скорости вращения ωНB НВ,
- истинной воздушной скорости VИCТ полета,
- общего шага ϕ0 НВ,
- угла атаки αНВ лопасти НВ,
- угла ψл_HB азимутального положения лопасти НВ,
- угла χ отклонения автомата перекоса в продольной плоскости,
- угла η отклонения автомата перекоса в боковой плоскости,
- ρ - массовой плотности воздуха,
- массы (веса) вертолета mВ.
Таким образом, векторное уравнение, связывающее нагружения на лопасти НВ в виде сигналов виброускорений, с параметрами полета и управления вертолетом будет:

На установившихся прямолинейных режимах горизонтального полета силы и моменты сил, действующие на лопасти РВ, зависят от следующих параметров динамики вертолета:
- частоты ωРВ вращения РВ,
- угла установочного шага ϕРВ РВ,
- истинной воздушной скорости VИСТ полета вертолета,
- угла атаки ωPВ лопасти РВ,
- угла  азимутального положения лопасти РВ,
азимутального положения лопасти РВ,
- массовой плотности воздуха ρ,
- собственного момента инерции JY вокруг вертикальной строительной оси вертолета.
Тогда векторное уравнение, связывающее нагружения на лопасти РВ в виде сигналов виброускорений, с параметрами полета будет:

В предлагаемом способе учитываются следующие очевидные факты:
- массовая плотность воздуха ρ легко вычисляется на основании измерений барометрической высоты НБAР,
- угол атаки лопастей НВ αНВ и РВ αРВ в прямолинейном горизонтальном полете можно принять равным измеряемому углу атаки α,
- угол азимутального положения каждой лопасти  вычисляется на основании измерений угла фазы φНВ лопастей НВ,
вычисляется на основании измерений угла фазы φНВ лопастей НВ,
- угол азимутального положения каждой лопасти вычисляется на основании измерений угла фазы φРВ лопастей РВ.
Согласно основному принципу контроля состояния технических систем в текущий момент времени t сбалансированность лопастей через виброускорения можно описать как

где  - начальное вибросостояние лопастей НВ, характеризующее полную их сбалансированность;
- начальное вибросостояние лопастей НВ, характеризующее полную их сбалансированность;  - начальное вибросостояние лопастей РВ, характеризующее полную их сбалансированность; t0 - начальный момент времени эксплуатации вертолета;
- начальное вибросостояние лопастей РВ, характеризующее полную их сбалансированность; t0 - начальный момент времени эксплуатации вертолета;  и
и  - векторные случайные процессы, описывающие изменение вибросостояния лопастей, соответственно НВ и РВ, в произвольный времени t эксплуатации вертолета;
- векторные случайные процессы, описывающие изменение вибросостояния лопастей, соответственно НВ и РВ, в произвольный времени t эксплуатации вертолета;  и
и  - не наблюдаемые с помощью средств измерения случайные процессы изменения вибросостояния лопастей, соответственно НВ и РВ, не зависящие от прошлого или текущего состояния.
- не наблюдаемые с помощью средств измерения случайные процессы изменения вибросостояния лопастей, соответственно НВ и РВ, не зависящие от прошлого или текущего состояния.
Сформировать модели начального вибросостояния лопастей НВ и РВ на всем диапазоне высот и скоростей за один полет не удается, но, следуя принципу адаптивности, модели дообучаются при попадании вертолета в последующих полетах в новые условия. Дообучение происходит при условии сохранения нормального состояния НВ и РВ по балансировке. Таким образом, для обучения моделей вибросостояния НВ не нужно выполнять специальные контрольные полеты. Наоборот, эти модели сразу охватят наиболее типовые, регулярно используемые в эксплуатации, режимы полета.
После завершения формирования моделей начального вибросостояния лопастей НВ и РВ на любом из режимов согласно принципу адаптивности формируются индивидуальные допусковые границы, и сразу же начинается процесс оценивания текущей сбалансированности лопастей через измерения соответствующих вибродатчиков и ее сравнение с оценками начального состояния


Если в результате контроля зафиксировано ухудшение вибросостояния какой-либо лопасти НВ и РВ только на режимах установившегося горизонтального полета, то вероятной причиной этого может быть массовая (весовая) или механическая (в шарнирах) разбалансировка соответствующей лопасти контролируемого винта. Из-за нарушения соконусности какой-либо лопасти НВ и РВ ухудшение его вибросостояния будет наблюдаться и на режимах висения, и на режимах горизонтального полета.
В предлагаемом способе принят во внимание тот факт, что используемая в прототипе методика спектрального анализа представляет собой тонкий математический аппарат, который на практике себя зарекомендовал при оценивании вибросостояния различных роторных машин, находящихся в наземных стационарных условиях эксплуатации. Условия полета вертолета не гарантируют однозначной спектральной картины измеренных виброускорений датчиками вибрации даже при выдерживании экипажем заданных режимов полета и частот вращения винтов. Появление высших гармоник в вибросигнале со сравнительно значимыми амплитудами далеко не всегда можно толковать только разбалансировкой лопастей соответствующего винта. Поэтому контроль динамической балансировки в предлагаемом способе осуществляется на основании более достоверного функционального анализа выражений типа (4).
В отличие от задач контроля отдельных параметров, как это имеет место в прототипе, задача контроля динамической разбалансировки лопастей винтов в предлагаемом способе решается путем оценивания величины и положения вектора виброускорения соответствующего датчика вибрации:
образуемого измерениями соответствующего датчика вибрации (акселерометра) по трем осям чувствительности. Поэтому контроль проводится не только по величине каждой составляющей вектора (5), но и по положению вектора в трехмерном пространстве. С этой целью по каждому одновременному измерению (опросу) виброускорения по трем осям чувствительности датчика вычисляется величина модуля соответствующего вектора (5):
и направление этих векторов в трехмерном пространстве в виде:
- косинуса пространственного угла  , между вектором
, между вектором  и вектором, образуемым единичными ортами по каждой из трех осей этого пространства:
и вектором, образуемым единичными ортами по каждой из трех осей этого пространства:

- косинуса пространственного угла  , между вектором
, между вектором  и вектором, образуемым единичными ортами по каждой из трех осей этого пространства:
и вектором, образуемым единичными ортами по каждой из трех осей этого пространства:
Таким образом, контроль сбалансированности каждой лопасти НВ и РВ выполняется по пяти выражениям (4-8):
- для составляющей  и
и  по продольной оси чувствительности соответствующего вибродатчика (акселерометра);
по продольной оси чувствительности соответствующего вибродатчика (акселерометра);
- для составляющей  и
и  по вертикальной оси чувствительности соответствующего вибродатчика (акселерометра);
по вертикальной оси чувствительности соответствующего вибродатчика (акселерометра);
- для составляющей  и
и  по поперечной оси чувствительности соответствующего вибродатчика (акселерометра);
по поперечной оси чувствительности соответствующего вибродатчика (акселерометра);
- для модуля  и
и  вектора измерения соответствующего вибродатчика (акселерометра);
вектора измерения соответствующего вибродатчика (акселерометра);
- для косинуса пространственного угла  и
и  вектора измерения соответствующего вибродатчика (акселерометра).
вектора измерения соответствующего вибродатчика (акселерометра).
Способ определения расходования ресурса и спектра нагрузок основных элементов планера маневренных самолетов
Способ мокрой очистки воздуха
Система сбора данных
Способ утилизации продувочной воды циркуляционной системы
Система регистрации данных
Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек - машина"
Способ оценки и анализа техники пилотирования по данным бортовых устройств регистрации параметрической полетной информации
Набор олигодезоксирибонуклеотидных праймеров и флуоресцентно-меченого зонда к фрагменту генов 5.8s-25s рибосомальной рнк и межгенному спейсеру для детекции патогенных грибков кошек и собак рода cryptococcus
Способ определения расходования ресурса и спектра нагрузок основных элементов планера маневренных самолетов
Способ мокрой очистки воздуха
Система сбора данных
Способ утилизации продувочной воды циркуляционной системы
Система регистрации данных
Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек - машина"
Способ оценки и анализа техники пилотирования по данным бортовых устройств регистрации параметрической полетной информации
Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина"
Теплообменная поверхность
Многофункциональный двухместный боевой вертолет круглосуточного действия, комплекс радиоэлектронного оборудования, используемый на данном вертолете

