Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ УПРАВЛЯЕМОГО ПЕРЕДВИЖЕНИЯ СМАРТФОНА ПО ГОРИЗОНТАЛЬНОЙ ПОВЕРХНОСТИ
Вид РИД
Изобретение
Изобретение относится к малогабаритному самоходному транспортному средству, выполненному в виде аксессуара смартфона, карманного компьютера или другого гаджета, и может найти применение в качестве малогабаритного робота телеприсутствия, обеспечивающего перемещения смартфона по заданной траектории, для осуществления видеосвязи (в качестве видеотелефона) посредством, например, Skype. Кроме того, это устройство может быть использовано в качестве автоматического секретаря бизнес-конференций, дистанционного сканера и фотоаппарата, для дистанционного обучения, консультаций, охраны помещений, родительского контроля и т.п.
В настоящее время известно много конструкций роботов телеприсутствия, например первый российский робот телеприсутствия «R.ВОТ», разработанный преподавателями и аспирантами МГТУ им. Баумана, МГУ им. Ломоносова, МИФИ и выпускаемый российской компанией «R.Bot». Американская фирма «Double Robotics» начала выпускать робот «Double», представляющий собой мобильный гаджет, встроенный в движущуюся по полу платформу.
Известна система управления мобильным роботом по патенту РФ №124622, содержащая соединенные между собой кабелями стационарную часть и часть, размещенную непосредственно на подвижной платформе робота, при этом в стационарной части размещены пульт управления с блоком кнопок и четырьмя двухкоординатными джойстиками, блок питания стационарной части и питания подвижной платформы, а также промышленный компьютер для приема информации с подвижной платформы и выдачи сигналов управления платформой и управления технологическим оборудованием, а на подвижной платформе робота - соединенные между собой маршрутизатор, бортовая ЭВМ, микроконтроллерные блоки непосредственного управления технологическим оборудованием и видеокамеры, видеоизображение с которых транслируется на монитор промышленного компьютера.
Известен мобильный робот по патенту РФ №2446937, содержащий платформу, три колеса, три колесных вала со смонтированными на них колесами, установленные на платформе три колесные вилки, два электродвигателя, датчик угла поворота первого колеса, датчик скорости вращения первого колеса, источник питания и бортовую вычислительную сеть, при этом колесный вал первого колеса кинематически связан с выходным валом первого электродвигателя, датчиком угла поворота первого колеса и датчиком скорости вращения первого колеса, а оси колесных валов первого и второго колес лежат на одной прямой. Кроме того, в него введены датчик угла поворота второго колеса и датчик скорости вращения второго колеса, кинематически связанные с колесным валом второго колеса, кинематически связанным с выходным валом второго электродвигателя, а бортовая вычислительная сеть выполнена с возможностью сбора и обработки данных с датчиков угла поворота и датчиков скорости вращения первого и второго колес и формирования и передачи управляющих сигналов на электродвигатели первого и второго колес.
Известно устройство для автоматического предоставления пользователям информационно-справочных услуг в ходе многомодального диалога и самостоятельного передвижения по заданной территории обслуживания по патенту РФ №108172, принятое за ближайший аналог и содержащее информационную стойку, которая имеет средства захвата и отображения аудиовизуальной информации, оснащена двумя сенсорными мониторами, видеокамерами, микрофонами, бортовым компьютером, обрабатывающим данные, поступающие с камер, микрофонов, сенсорных мониторов, датчиков препятствий, и установлена на подвижной платформе, компоновочная схема шасси которой состоит из двух ведущих и двух флюгерных колес, а для обнаружения препятствий по внешней окружности платформы расположены ультразвуковые и инфракрасные датчики; встроенные аккумуляторы обеспечивают автономную работу всех бортовых устройств и электроприводов шасси, многоканальная обработка поступающих от видеокамер сигналов в программном блоке обработки видеоданных обеспечивает определение наличия пользователей и слежение за перемещениями их лиц; два вида бесконтактных датчиков препятствий, рассчитанных на разные расстояния и время срабатывания, обеспечивают своевременное обнаружение динамических помех, возникающих по маршруту движения устройства.
Однако все указанные аналоги - это достаточно крупногабаритные устройства, не относящиеся к мобильным, и в основном предназначены для работы в качестве гида на выставках, салонах и экспозициях, а также для использования в цехах промышленных предприятий.
Задачей, на решение которой направлено изобретение, заключается в создании компактного устройства, предназначенного для установки в него смартфона и могущего передвигаться с ним по плоскости, что гарантируется за счет обеспечения функциональных возможностей устройства с минимизацией его размеров. Кроме того, такая конструкция устройства дает возможность получения такого смежного технического результата как расширение функциональных возможностей самого смартфона или другого гаджета.
Получение указанного технического результата обеспечивается в заявленном техническом решении, названном: «Устройство для управляемого передвижения смартфона по горизонтальной поверхности». Это устройство включает блок управления, расположенный на подвижной платформе, компоновочная схема шасси которой состоит из двух независимых соосных ведущих колес и выдвижной опоры, и двух электродвигателей; датчики обнаружения препятствий и края поверхности, например, стола, встроенный источник питания, обеспечивающий работу всех компонентов системы. При этом подвижная платформа выполнена в виде корпуса с отсеком для установки смартфона и устройством его крепления, каждое колесо жестко закреплено на валу своего электродвигателя, а с другой стороны на эти валы установлены датчики обратной связи с мотором, причем оба электродвигателя выполнены реверсивными и с возможностью изменения скорости вращения. В качестве таких электродвигателей можно использовать малогабаритные электродвигатели постоянного тока с редуктором, а в качестве датчиков обратной связи - инкрементальные энкодеры (оптические или на основе эффекта Холла). Так, для изготовления действующего макета был использован реверсно-коллекторный электромотор с металлическим редуктором: Micro Metal Gearmotor HP 6V 320RPM, выпускаемый фирмой «WZE».
Выдвижная опора позволяет устанавливать тыльную плоскость корпуса под углом от 0 до 85° к горизонту и вместе с колесами обеспечивать устойчивое положение корпуса при его перемещении по плоскости, и выполнена в виде поворачивающейся на оси консоли, позволяющей устанавливать на горизонтальной поверхности корпус под углом от 0 до 85° к горизонту к его тыльной плоскости, для чего один конец консоли закреплен на валу третьего аналогичного электродвигателя, установленного в корпусе параллельно двум первым и связанного с блоком управления датчиком угла поворота для автоматического поднятия и изменения угла подъема корпуса во время работы, а второй опорный конец выполнен закругленным. В качестве такого электродвигателя также можно использовать электродвигатель с редуктором вместе с датчиком положения, например датчик угла поворота на основе потенциометра: Analog Rotation Sensor V1, 68-32-40, выпускаемый фирмой «DFRobot».
Блок управления выполнен с возможностью сбора и обработки данных, поступающих от смартфона и от датчиков обнаружения препятствий и края стола, а также для формирования и передачи управляющих сигналов на электродвигатели колес и выдвижной опоры. В качестве блока управления можно использовать такой электронный компонент, как микроконтроллер (8-ми или 32-разрядный), например микроконтроллер Arduino Micro фирмы «ARDUINO», а в качестве датчиков обнаружения препятствий и края стола - помехозащищенные инфракрасные сенсоры, измеряющие расстояние в необходимом диапазоне, например датчик Pololu Carrier Distance Sensor фирмы «Pololu».
Кроме того, устройство содержит модуль «BLUETOOTH» для двухсторонней связи между блоком управления и смартфоном.
В частном случае в заявляемом устройстве блок управления, а также и вставляемый в корпус устройства смартфон могут работать под управлением одной из мобильных операционных систем, например, семейства Android, iOS или Windows Mobile, на которой будет установлена управляющая программа "CLICKER", таким образом, это даст возможность использовать с заявленным устройством практически все возможные типы смартфонов.
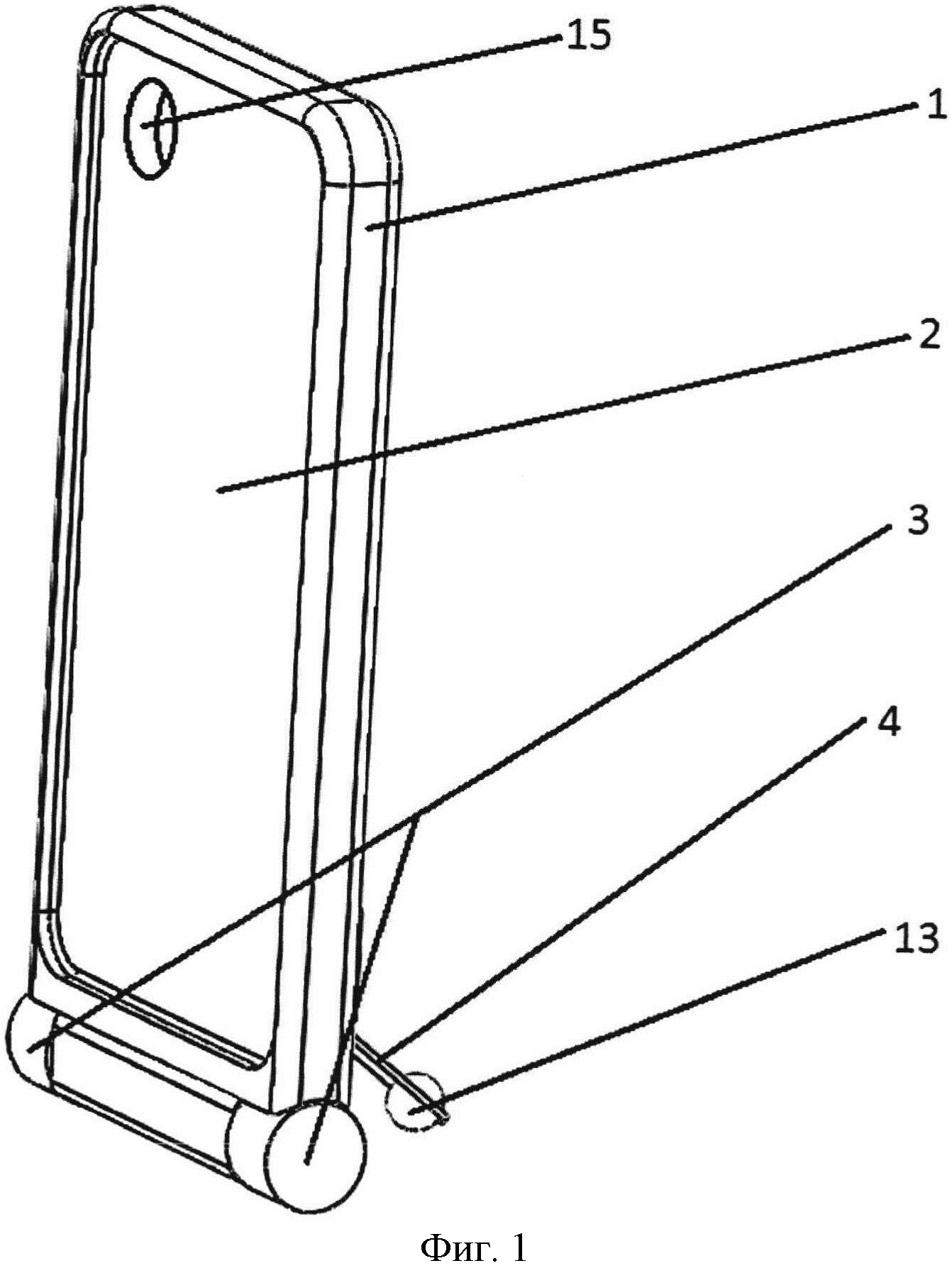
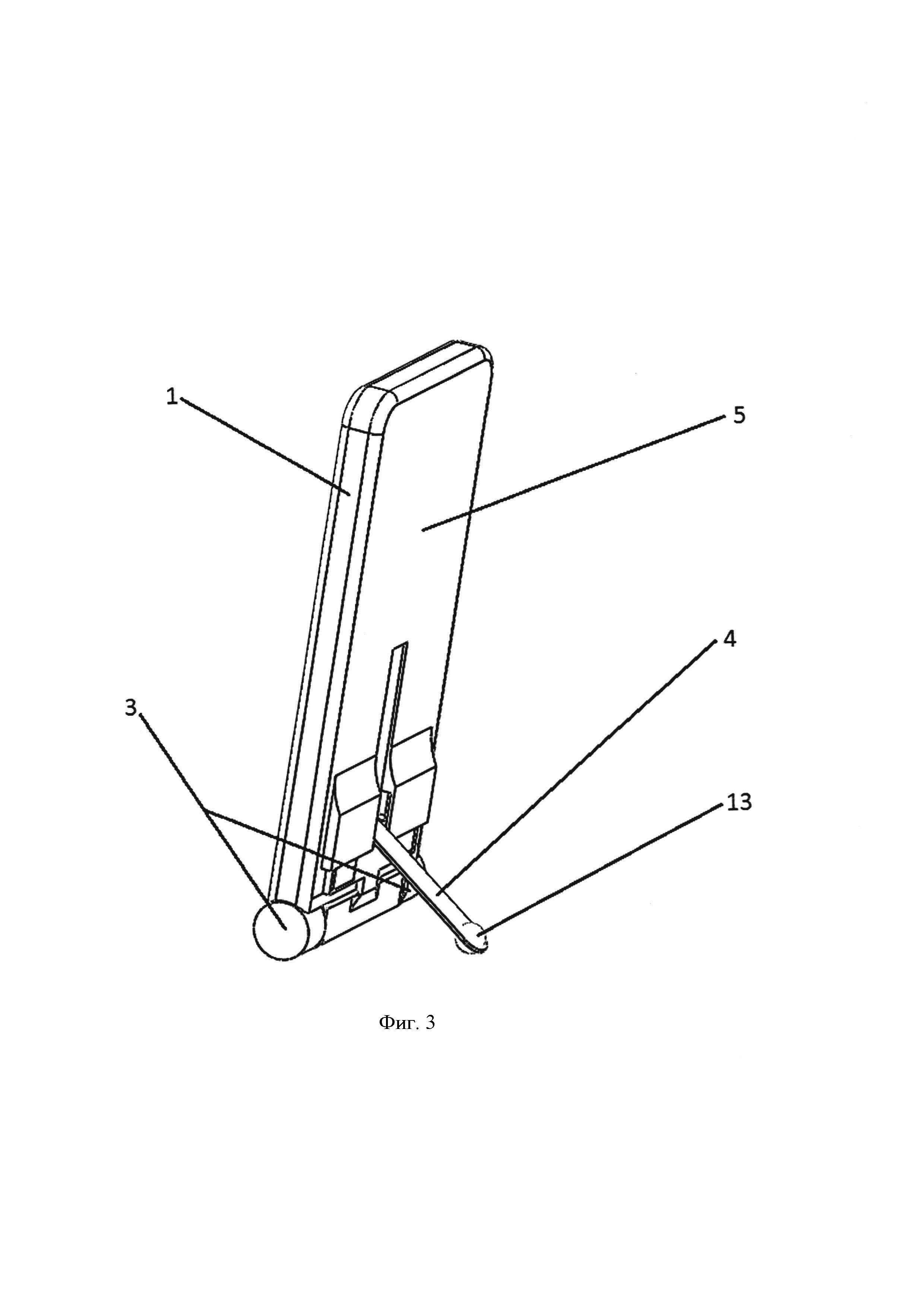
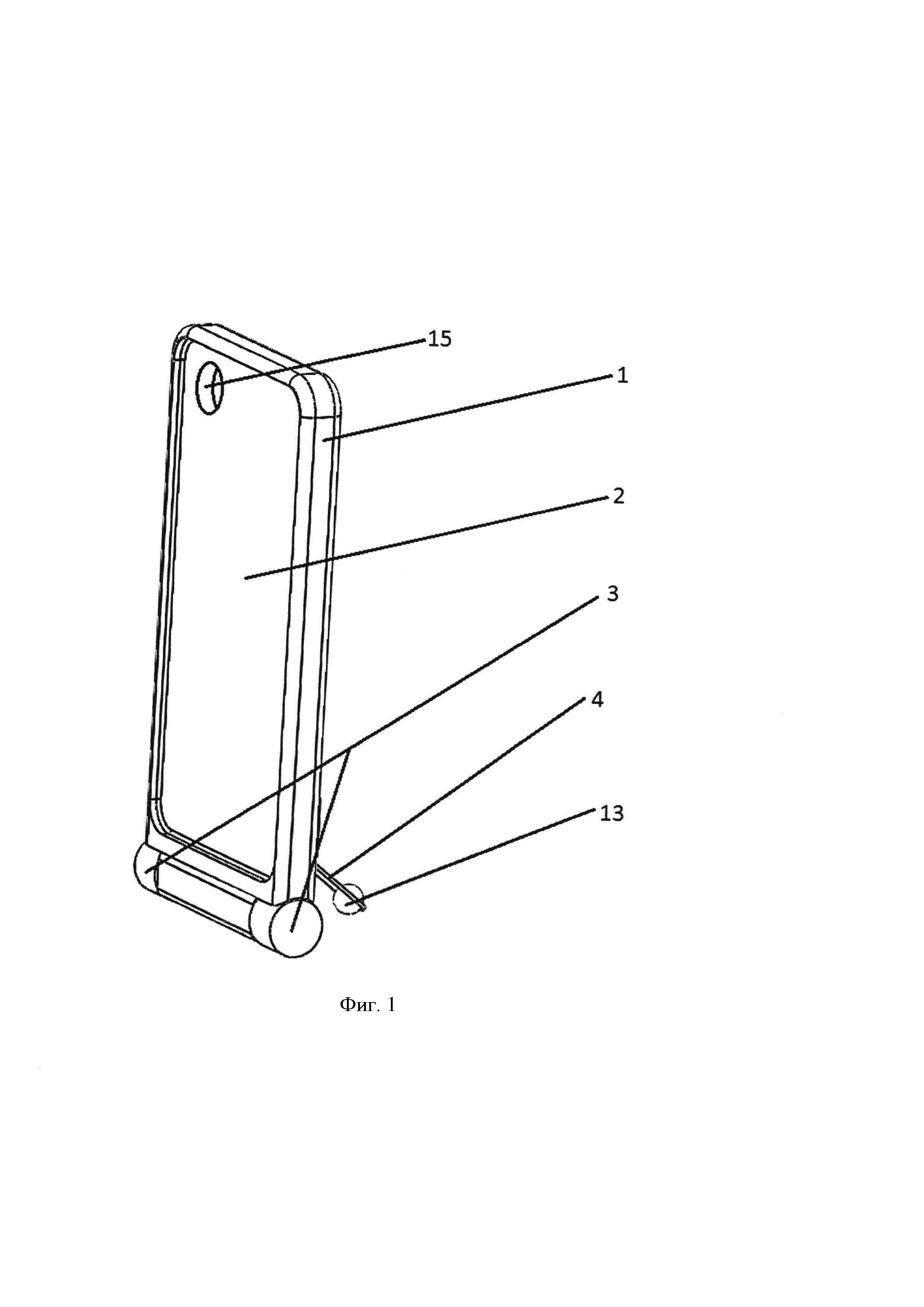
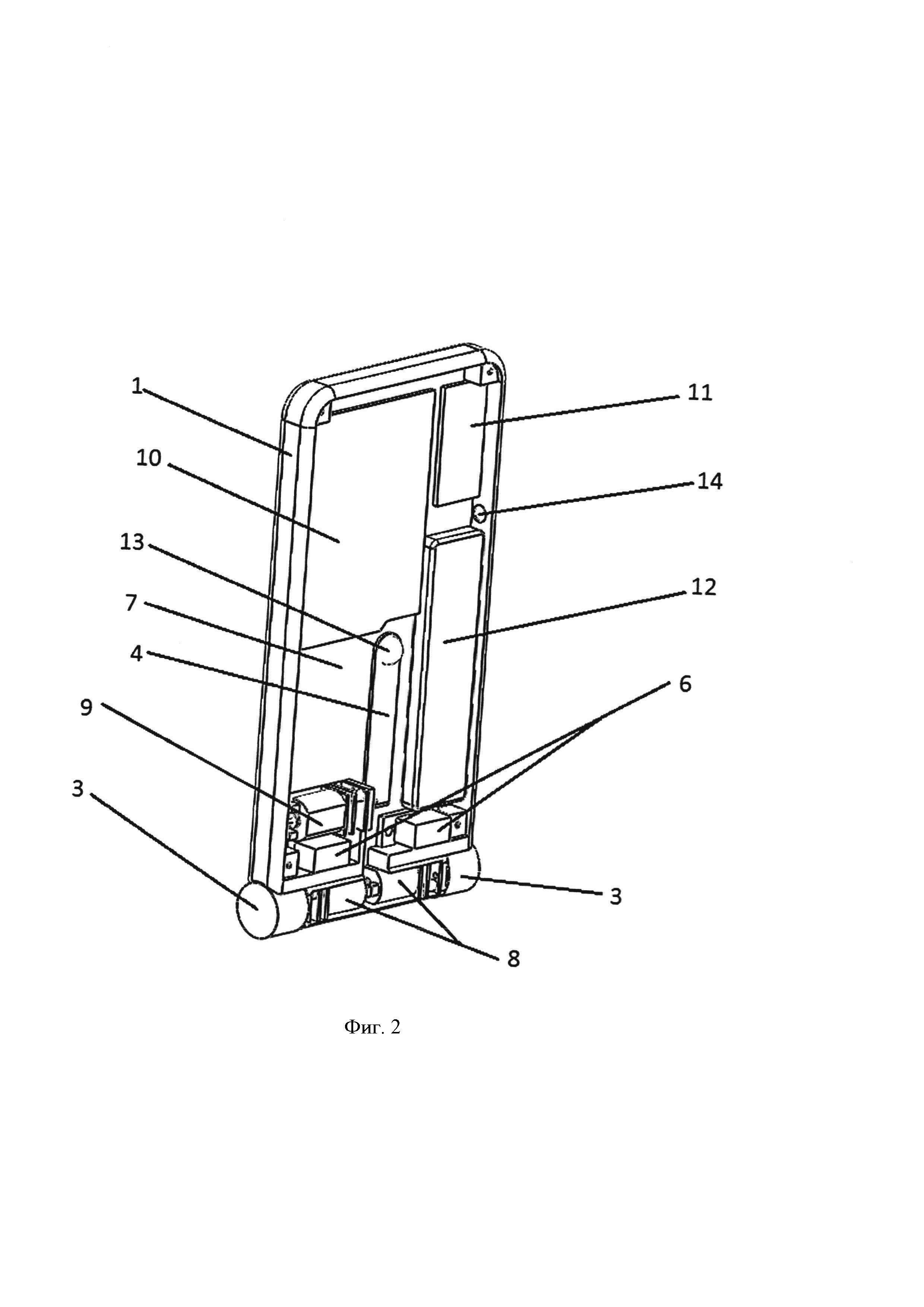
Сущность изобретения поясняется чертежами устройства: на фиг. 1 показан вид спереди (3/4), на фиг. 2 - вид устройства сзади без задней стенки в сложенном состоянии, на фиг. 3 - устройство, установленное на поверхность, вид сзади (3/4).
На чертежах показано:
1 - корпус платформы;
2 - отсек для смартфона;
3 - колеса;
4 - выдвижная опора "нога";
5 - задняя крышка корпуса;
6 - датчики препятствия и края стола;
7 - внутренняя часть корпуса;
8 - электродвигатели колес;
9 - электродвигатель для поднятия "ноги";
10 - блок управления (плата);
11 - модуль Bluetooth;
12 - источник питания (аккумулятор);
13 - опора «ноги»;
14 - кнопка вкл/выкл;
15 - сквозное отверстие для окуляра фото- и видеокамер.
Внешний вид корпуса 1 устройства имеет примерно такую же форму и габаритные размеры, как и сам смартфон и служит как для переноски и предохранения смартфона от внешних воздействий, так и для размещения в нем датчиков расстояния (датчиков препятствия и края стола) 6, блока управления 10, источника питания (аккумулятора) 12, электродвигателей колес 8 и электродвигатель опоры 9, модуля Bluetooth 11, который электронно соединяет блок управления 10 со смартфоном, и кнопки 14 для подачи питания на электродвигатели, все датчики и блок управления. Колеса 3, посаженные на ось своих электродвигателей 8, имеют небольшой зазор с корпусом платформы 1. В собранном (мобильном) виде всего устройства выдвижная опора платформы ("нога") 4 расположена в пазу корпуса 1 параллельно задней крышке корпуса 5, в рабочем состоянии конец опоры 13 опирается на поверхность передвижения, причем он имеет закругление в виде полусферической поверхности, которое служит для уменьшения трения при перемещении платформы по горизонтальной поверхности.
Для функционирования заявленного устройства вместе со смартфоном необходима, кроме того, предварительная установка в управляемый (устанавливаемый в устройство) и в управляющий (с которого идет сигнал) смартфоны приложения - управляющей программы "CLICKER", которая скачивается из интернета и устанавливается на все смартфоны, которые будут использоваться вместе с заявленным устройством.
Заявленное устройство работает следующим образом: включенный смартфон вставляется и фиксируется в отсеке 2 корпуса платформы 1, например, с помощью упорных пружин, нажатием кнопки 14 подается питание на электродвигатели, все датчики и блок управления. После этого сенсоры смартфона, определяющие его нахождение, срабатывают, и микроконтроллер блока управления включает BLUETOOTH, подсоединяясь к смартфону, после этого автоматически устанавливается электронная связь блока управления 10 со смартфоном. Для управления устройством необходимо на смартфоне запустить необходимое приложение (программу "CLICKER"), которая, будучи установленной на управляемый смартфон, при звонке реагирует на такую же программу, установленную на вызывающем смартфоне, и сообщает владельцу, что управление устройством активизировано. Затем по сигналу от блока управления выдвигается нога 4, после чего все устройство устанавливается на поверхность, по которой оно будет перемещаться, например на стол, на 3 точки опоры: 2 колеса и конец опоры 13, при этом перемещение устройства возможно вперед, назад и с поворотом.
После активации устройства включаются обе камеры, микрофон и динамик и смартфон начинает передавать звук, а также фото- и видеоизображение в обе стороны, а путем передачи от вызывающей стороны сигнала управления колесами платформы она имеет возможность перемещаться по поверхности, на которую предварительно установлена.
При помощи датчиков устройства и управляющих сигналов звонящего (проходящих по интернету) процессор смартфона в соответствии с установленным приложением формирует и посылает управляющие сигналы на блок управления через bluetooth, а блок управления выполняет указания процессора смартфона по следующей схеме: сигнал звонящего + учет сигналов датчиков → процессор смартфона → модуль blue tooth → блок управления электродвигателями → электродвигатели.
После этого собранное и укомплектованное смартфоном устройство, дополняя микрофон, динамик и 2 камеры смартфона (переднюю и заднюю), при помощи управляемых процессором блока управления 10 колес 3 превращает заявленное устройство в миниатюрный робот телеприсутствия, который может передвигаться, например, по поверхности стола, например, во время проведения совещания и выполнять определенные действия. Так, если владелец вызываемого смартфона до или во время разговора решает, что звонящий абонент может использовать его смартфон вместе с устройством в качестве робота телеприсутствия, то он нажимает кнопку 14 и ставит устройство с установленным в него смартфоном на горизонтальную поверхность, например на стол, за которым проходит совещание, после чего управление вызываемым смартфоном и заявленным устройством переходит к звонящему абоненту.
Дальнейшие действия устройства совершаются или под управлением абонента, звонящего на смартфон, при этом сигнал поступает по сотовой связи через процессор смартфона на блок управления устройства или автоматически с помощью приложения, установленного на смартфон, например, для автоматического поднятия платформы из горизонтального положения. Или если необходимо, то при поступлении соответствующего сигнала от приложения выдвижная опора 4 с помощью электродвигателя 9 устанавливается под определенным углом к горизонту.
Обмен информацией в электронной форме между смартфоном и блоком управления совершается посредством модуля Bluetooph 11. Вся информация, поступающая в блок управления, обрабатывается процессором смартфона с последующей выработкой команд и выбора режима работы устройства. Блок управления выполнен с функцией ретрансляции поступающих со смартфона команд другим объектам системы и с функцией ретрансляции на смартфон полученной информации. Датчики препятствия и края стола служат для предохранения от столкновения и падения, а также для ориентации и позиционирования устройства в пространстве.
Кроме этого, упомянутое приложение имеет функцию автоматического поднятия устройства в рабочее положение в случае, если передвигающееся по столу устройство упадет на бок на плоскость, по которой оно передвигалось. В этом случае в качестве датчика рабочего (вертикального) положения устройства выступает датчик ускорения, находящийся в смартфоне.
В процессе работы предлагаемое устройство может автоматически определять угловое положение источника речи, поворачиваться и подъезжать к нему и делать фото- и видеосъемку говорящего. Повороты платформы осуществляются за счет или разной скорости вращения колес (поворот по дуге большого радиуса) или когда одно колесо стоит, а другое вращается вокруг него (поворот по минимально возможному радиусу). Необходимый радиус поворота рассчитывается блоком управления, который формирует и посылает соответствующий сигнал на электродвигатели колес и выдвижной опоры.
Кроме вышесказанного заявленное устройство может совершать следующие действия:
- двусторонняя аудио- и видеосвязь с позвонившим на смартфон абонентом в режиме реального времени;
- при положении, когда корпус наклонен примерно под 65° к горизонту, позволяет при помощи камеры смартфона фотографировать и сканировать документы, лежащие на этой поверхности;
- благодаря имеющимся датчикам обнаружения препятствий и края стола автоматически останавливаться за 10-15 см до края стола, по которому оно движется, и за 10-15 см до препятствия, находящегося в плоскости движения;
- автоматический секретарь-стенографист на совещаниях, автоматическая видео- и аудиозапись совещания;
- обычный видеозвонок с удобным позиционированием смартфона;
- связь телеприсутствия в группах: профессиональные и клубные сообщества, студенты, школьники, спортсмены, и т.п., где нужны коллективные совещания;
- дистанционное обучение или консультации;
- удаленная охрана помещения: наблюдение за обстановкой, подача голоса в случае потенциальной угрозы;
- удаленный родительский контроль обстановки, в которой находится ребенок;
- аварийная подзарядка телефона при помощи аккумулятора устройства и многое другое.
Заявленное устройство в дальнейшем может стать атрибутом каждого носимого электронного гаджета. Это будет мобильный миниробот, который всегда с его владельцем, это будет личный помощник, который всегда готов и всегда на связи, даже когда лежит в кармане, это будет устройство, с которого начнет развиваться новый класс носимых гаджетов: электронно-механический.
Устройство и способ для безопасного позиционирования коронарного стента в коронарных артериях
Устройство и способ для безопасного позиционирования коронарного стента в коронарных артериях

