Результат интеллектуальной деятельности: Способ комплексного мониторинга и управления состоянием многопараметрических объектов
Вид РИД
Изобретение
Изобретение относится к способам управления состоянием многопараметрических объектов (динамических систем, процессов) на основе результатов мониторинга и может быть использовано в системах управления объектами (динамическими системами, процессами) в военной, технико-экономической и социальной сферах деятельности.
В последнее время в условиях увеличивающегося количества природных и техногенных катастроф возрастает актуальность разработки способов комплексного мониторинга состояния подвижных и стационарных многопараметрических объектов (МПО) и формирования на основе результатов мониторинга своевременных и эффективных управляющих решений по корректировке условий и режимов функционирования данных объектов. Под комплексным мониторингом здесь и далее будем понимать комплексную систему наблюдения за параметрами состояния многопараметрических объектов, оценки и прогноза их изменений под воздействием техногенных, природных и террористических угроз. Под многопараметрическим объектом (далее по тексту - МПО) здесь и далее будем понимать сложные (с количеством параметров не менее 10) объекты, непосредственно на которых или на определенном удалении от них размещены различные комплекты измерительной аппаратуры, в состав которых могут входить датчики для измерения интенсивности радиоизлучений, температуры, влажности, давления, линейных нагрузок, распределенных нагрузок, уровня радиации, состава газов, концентрации растворов, датчики наличия контакта, а также другие датчики по требованию потребителей.
К настоящему времени предложен ряд технических решений, обеспечивающих управление сложными объектами различного назначения на основе оценок состояния МПО.
Известен способ контроля и управления радиоэлектронными средствами военных объектов и система для его реализации [1. Патент на изобретение, Россия, №2321175, МПК H04B 17/00, 2006 г.]. Способ обеспечивает сбор, обработку и обобщение информации об обстановке в районе действий военных объектов и информацию об их боевой готовности, использование обобщенной информации на автоматизированных рабочих местах командного пункта, предназначенных для формирования информационных моделей и выбора на их основе команд боевого управления, передаваемых на подчиненные и приданные военные объекты. Особенностью и отличительным признаком данного технического решения является создание адаптивной к разнородным объектам управления оперативной, быстродействующей, защищенной от естественных и искусственно создаваемых воздействий системы управления радиоэлектронными средствами военных объектов. Вместе с тем, данный способ не обеспечивает мониторинг и управление состоянием военных объектов в значительном количестве физических полей, что в свою очередь может приводить к увеличению количества нештатных и аварийных ситуаций на данных объектах.
Известен способ управления демаскирующими признаками системы связи [2. Патент на изобретение, Россия, №2450337, МПК G06F 15/00, 2011 г.] заключающийся в том, что на основе заданных значений показателей разведзащищенности и своевременности реконфигурации системы связи задают количество управляемых и неуправляемых демаскирующих признаков, планируют развертывание и функционирование системы связи, развертывают, настраивают систему связи, применяют систему связи по назначению, на развернутой системе связи прогнозируют изменения значений демаскирующих признаков системы связи во времени, по спрогнозированным значениям измеренных демаскирующих признаков системы связи производят расчет значений показателей разведзащищенности системы связи, сравнивают их с требуемыми значениями, при несоответствии значений показателей разведзащищенности требованиям упреждающе производят реконфигурацию системы связи с целью обеспечения требуемой разведзащищенности. Особенностью и отличительным признаком аналога является использование ограниченного перечня характеристик состояния системы связи только в одном физическом поле, что делает невозможным мониторинг параметров состояния системы связи в ряде физических полей и, в конечном счете, может приводить к увеличению количества нештатных и аварийных ситуаций на вышеупомянутом объекте.
Наиболее близким аналогом к предлагаемому способу является способ комплексного контроля состояния многопараметрического объекта по разнородной информации [3. Патент на изобретение, Россия, №2459245, G06F 19/00, 2011 г.], который и выбран в качестве прототипа.
Прототип обеспечивает оперативное преобразование результатов допусковой оценки контролируемых параметров объекта в цветографическую форму, которую интерпретируют как образ состояния МПО в момент окончания измерений в заданном временном интервале, совмещение предыдущих и последнего из сформированных образов, определение по совмещенным образам фактов наличия и величины значений признаков соответствия оцененных значений параметров допустимым, а также формирование временных рядов для определения формы и числовых характеристик тенденций изменений контролируемых параметров и состояния МПО.
Особенностью прототипа является применение экстраполяции временных рядов с последующим определением точечной и интервальной оценок значений параметров МПО, при которых может возникнуть критическая ситуация, и фиксации моментов времени прогнозируемого достижения этих значений. Однако подобный подход не только не учитывает реально существующие связи между предельными и допустимыми значениями параметров МПО, но и не позволяет заблаговременно формировать совокупности средств, способных оперативно изменять (корректировать) параметры МПО, что в свою очередь может приводить к увеличению количества нештатных и аварийных ситуаций на контролируемом МПО.
Техническим результатом настоящего изобретения является сокращение времени реагирования на текущие аномальные значения параметров МПО, охваченных мониторингом.
Технический результат достигается тем, что в известном способе комплексного контроля состояния МПО, заключающемся в измерении параметров многопараметрического объекта (МПО) в заданные временные интервалы, допусковой оценке измеренных значений параметров и формировании матрицы состояния МПО, согласно изобретению заранее до начала мониторинга задают моменты окончания измерений параметров МПО, задают совокупность средств воздействия, обеспечивающих изменение (коррекцию) предельных значений параметров МПО до допустимых значений, определяют для каждого средства воздействия затраты времени на изменение (коррекцию) предельных значений параметров МПО, определяют критические значения признаков несоответствия значений параметров МПО допустимым, формируют матрицу оперативности коррекции состояния МПО, в ходе мониторинга, по мере формирования заранее установленного количества объединяют матрицы состояния МПО, определяют по объединенной матрице состояния МПО фактические значения признаков несоответствия значений параметров МПО допустимым и моменты времени окончания измерений, устанавливают виды функциональных зависимостей признаков несоответствия значений параметров МПО допустимым от времени, определяют для установленных функциональных зависимостей прогнозные оценки моментов времени достижения критических значений признаков несоответствия значений параметров МПО допустимым, выбирают из матрицы оперативности коррекции состояния МПО средства воздействия, обеспечивающие максимальные значения допустимых временных интервалов упреждающего реагирования на аномальные значения параметров МПО, формируют управляющие решения и передают их на средства воздействия.
Сущность изобретения заключается в следующем.
Предварительно, до начала мониторинга:
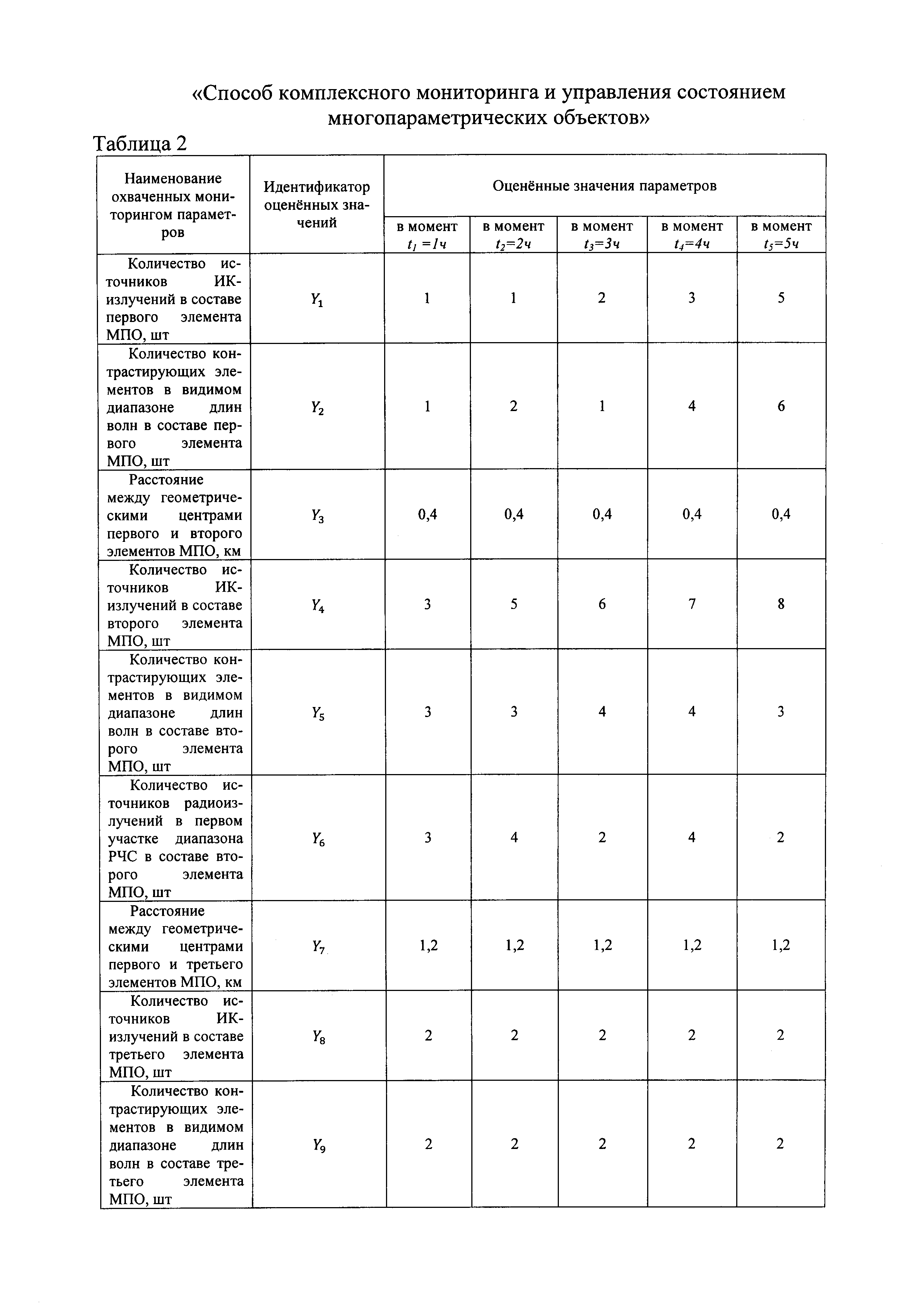
- задают значения моментов окончания измерений параметров и вносят их в матрицу состояния МПО. Значения моментов окончания измерений могут быть заданы, например, в виде таблицы 2;
- задают совокупности средств воздействия (СВ), обеспечивающих изменение (коррекцию) предельных значений параметров МПО до допустимых значений данных параметров;
- определяют для каждого СВ затраты времени на изменение (коррекцию) предельных значений параметров МПО путем деления значений функциональной производительности СВ на разность между верхним предельным значением параметра и допустимым значением параметра МПО, если СВ уменьшает верхнее предельное значение, или путем деления разности между допустимым значением параметра МПО и нижним предельным значением параметра на значения функциональной производительности СВ, если СВ увеличивает нижнее предельное значение;
- определяют критические значения признаков несоответствия значений параметров МПО путем деления верхних предельных значений параметров на максимально допустимые значения параметров или деления минимально допустимых значений параметров на нижние предельные значения параметров;
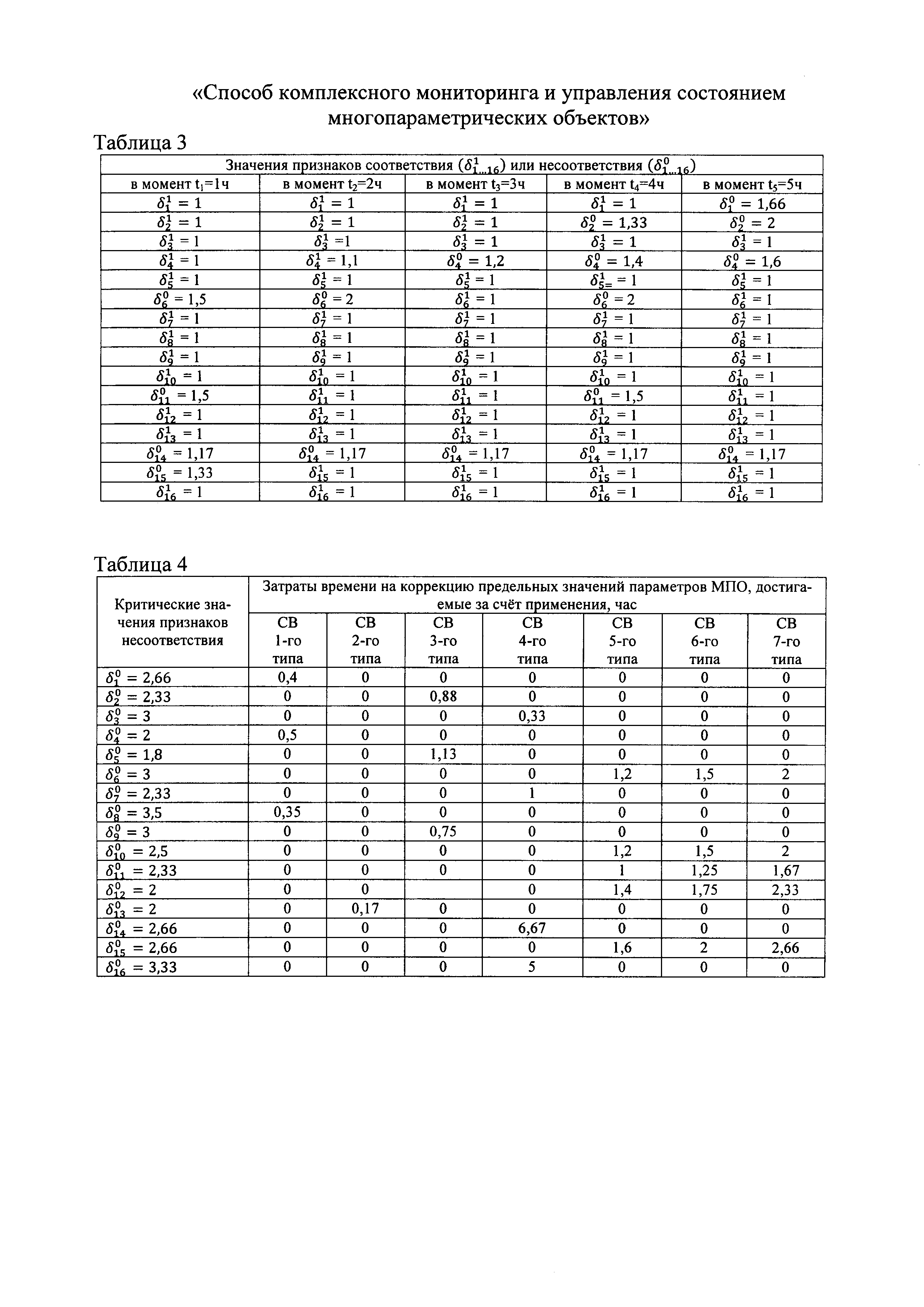
- формируют матрицу оперативности коррекции состояния МПО (по форме таблицы 4), в первые элементы всех строк которой вносят номера средств воздействия, первым элементам столбцов матрицы присваивают критические значения признаков несоответствия значений параметров МПО допустимым, а остальным элементам - вычисленные значения затрат времени на изменение (коррекцию) предельных значений параметров МПО, если СВ обеспечивает коррекцию соответствующего предельного параметра МПО, или нулевые значения в противном случае;
в ходе мониторинга:
- по мере формирования заранее установленного количества матриц состояния МПО их объединяют, например, в виде таблицы 3;
- определяют по объединенной матрице состояния МПО фактические значения признаков несоответствия значений параметров МПО допустимым и моменты времени окончания измерений;
- устанавливают виды функциональных зависимостей признаков несоответствия значений параметров МПО допустимым от времени;
- определяют с использованием полученных функциональных зависимостей прогнозные оценки моментов времени достижения критических значений признаков несоответствия значений параметров МПО допустимым;
- определяют значения допустимых временных интервалов упреждающего реагирования на аномальные значения параметров МПО путем вычитания из вычисленных значений моментов времени достижения критических значений признаков несоответствия значений параметров МПО допустимым указанных в объединенной матрице состояния МПО значений крайних моментов времени окончания измерений;
- выбирают средства воздействия, обеспечивающие максимальные значения разности между значениями допустимых временных интервалов упреждающего реагирования на аномальные значения параметров МПО и выбранными из матрицы оперативности коррекции состояния МПО значениями затрат времени на коррекцию предельных значений параметров МПО;
- формируют и передают на средства воздействия управляющие решения, содержащие типы СВ, номера аномальных параметров и моменты начала коррекции текущих аномальных значений параметров МПО.
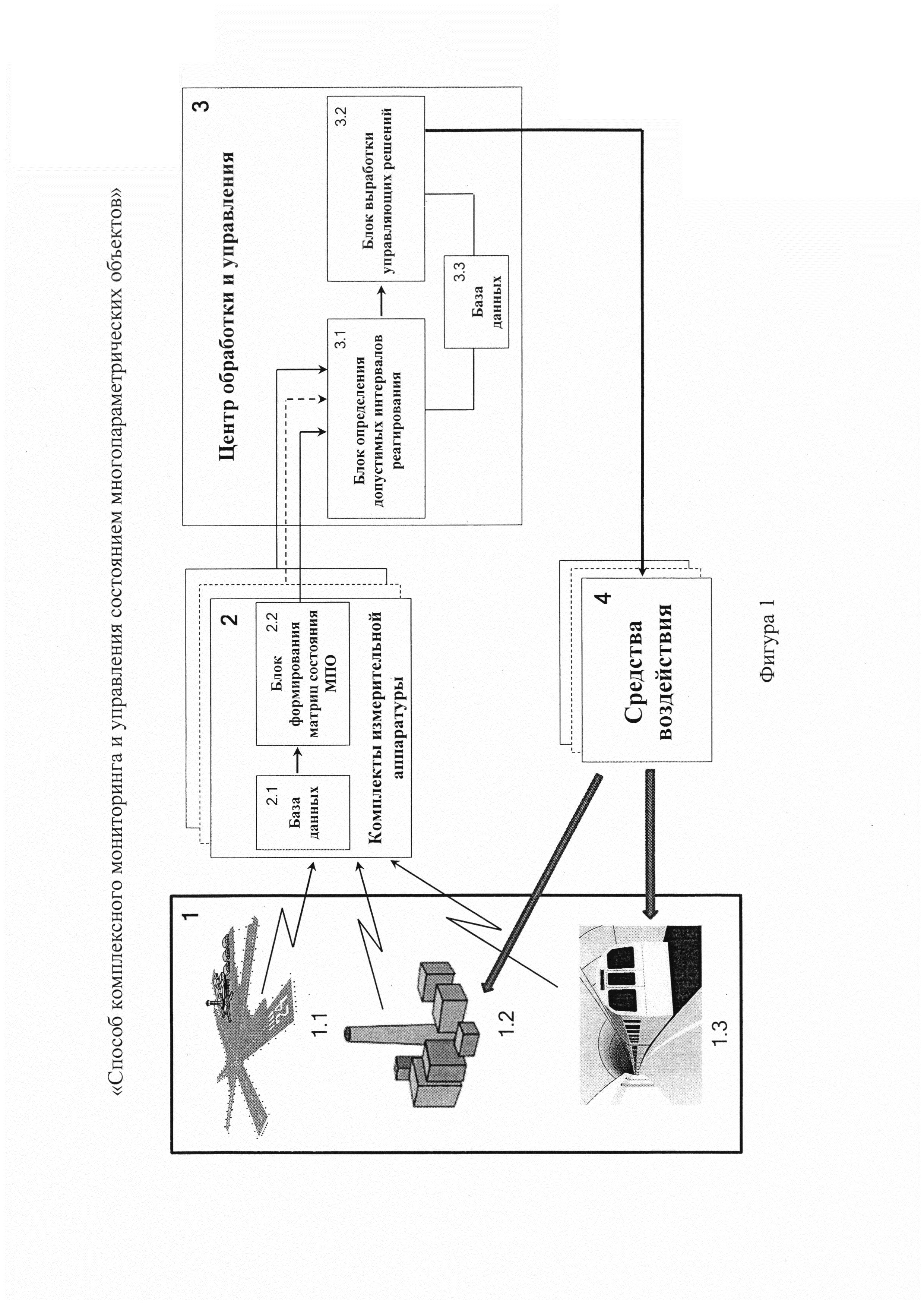
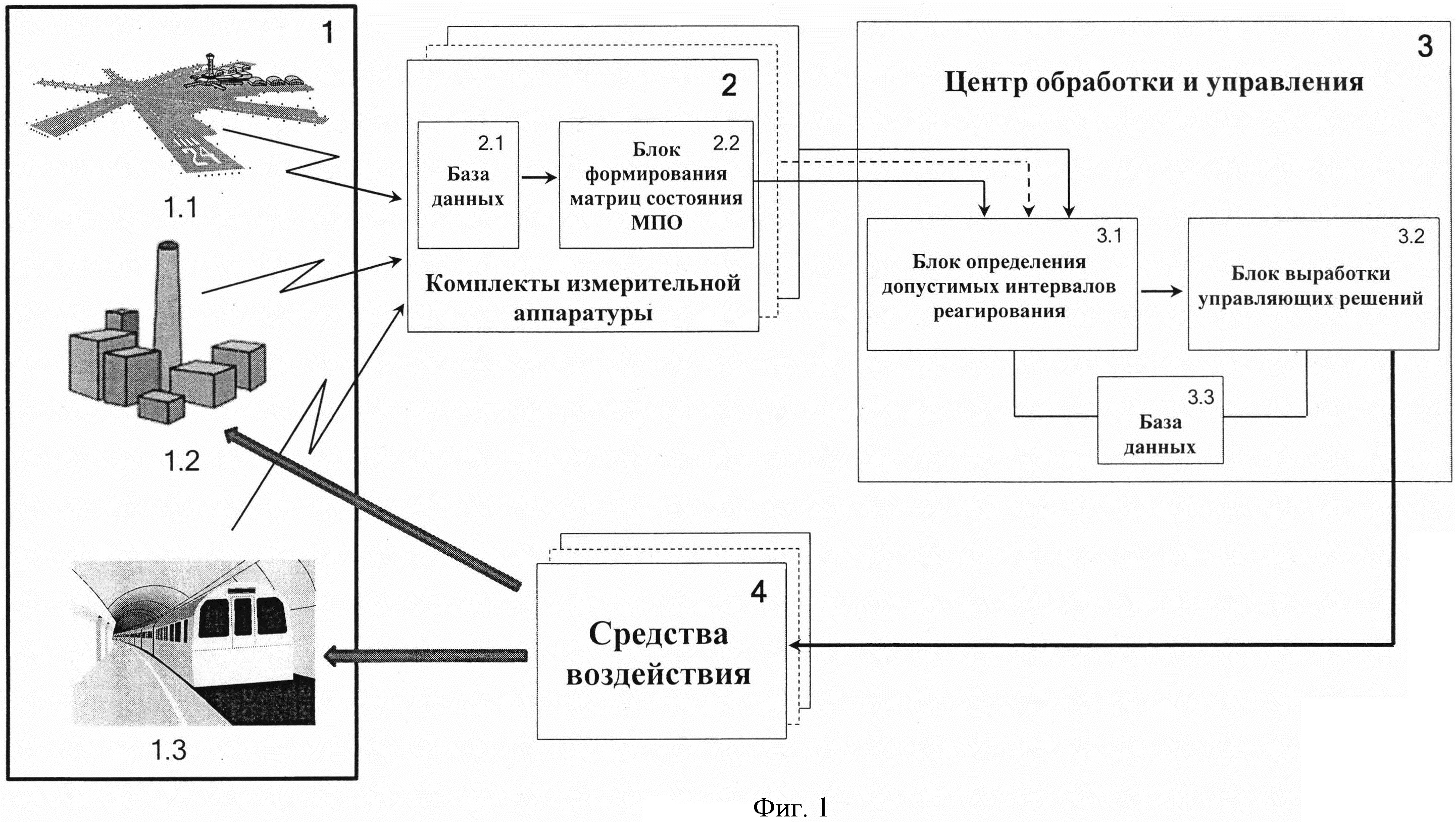
Схема организации комплексного мониторинга и управления состоянием многопараметрического объекта приведена на фигуре 1, где обозначены многопараметрический объект 1 с элементами 1.1…1.3; комплекты измерительной аппаратуры (КИА) - 2 с добавленными в них базой данных 2.1 и блоком формирования матриц состояния МПО - 2.2; центр обработки и управления (ЦОУ) - 3, с входящими в него блоками определения интервалов реагирования - 3.1 и выработки управляющих решений - 3.2; - комплекты средств воздействия - 4.
В состав комплектов измерительной аппаратуры 2 могут входить датчики для измерения интенсивности радиоизлучений, температуры, влажности, давления, линейных нагрузок, распределенных нагрузок, уровня радиации, состава газов, концентрации растворов, датчики наличия контакта, а также другие датчики по требованию потребителей мониторинговой информации. Входящий в каждый КИА 2 блок формирования матриц состояния МПО - 2.2 предназначен для оперативного (в масштабе времени, близком к реальному) объединения и компактного представления измеренных датчиками из состава КИА 2 значений параметров МПО в виде матриц состояния (по форме таблицы 2). В качестве варианта реализации блока 2.2 предлагается последовательно соединенные модуль с n элементами «И» и вычислитель, причем нечетные входы элементов «И» соединены с выходами датчиков, четные входы элементов «И» - с выходами базы данных 2.1, а выход вычислителя - со входом блока 3.1.
Блок 3.1 предназначен для определения допустимых значений временных интервалов упреждающего реагирования на аномальные значения параметров МПО. Данный блок может быть выполнен в виде последовательно соединенных модуля с n элементами «И» и вычислителя, причем нечетные входы элементов «И» соединены с выходами блоков 2.2, четные входы элементов «И» - с выходами базы данных, а выход вычислителя - со входом блока 3.2.
Блок 3.2 предназначен для формирования управляющих решений (приказов, распоряжений и т.д.) для средств воздействия. Данный блок может быть р в виде вычислителя, СМПО которого обеспечивает нахождение максимальных разностей между значениями допустимых временных интервалов упреждающего реагирования на критические значения признаков несоответствия и выбранными из хранящейся в памяти вычислителя матрицы оперативности коррекции состояния МПО значениями затрат времени на коррекцию предельных значений параметров МПО.
В соответствии с заявляемым способом до начала мониторинга на каждом КИА 2 формируют базу данных, содержащую:
идентификаторы ID=IS, IO, IY, где IS=ISη, - идентификаторы КИА, IO=IOi, i=1, …, I - идентификаторы МПО и IY=yij - идентификаторы контролируемых параметров МПО;
последовательность моментов времени {tn}, n=1, …, Nη передачи результатов оценки значений параметров МПО от КИА в центр обработки и управления (ЦОУ), при этом tn=t0+nΔη, где t0 - время начала мониторинга, Δη-заданный для η-го КИА интервал времени передачи матриц состояния МПО, значение которого может уменьшаться в зависимости от динамики изменения состояния параметров объектов мониторинга;
матрицу  нижних и верхних границ интервалов допустимых значений и предельных значений для каждого из подлежащих мониторингу параметров
нижних и верхних границ интервалов допустимых значений и предельных значений для каждого из подлежащих мониторингу параметров  МПО. Форма матрицы приведена в таблице 1;
МПО. Форма матрицы приведена в таблице 1;
совокупность правил, обеспечивающих:
оценку признаков соответствия  и признаков несоответствия
и признаков несоответствия  фактических значений параметров МПО допустимым, которая может быть произведена, например, по методике, изложенной в [4. Донсков Ю.Е., Дюндиков Е.Т., Качкин А.А. Методика комплексной оценки состояния информационной безопасности региональной группировки войск. / М.: Военная мысль, 2009, №10, стр. 16-27];
фактических значений параметров МПО допустимым, которая может быть произведена, например, по методике, изложенной в [4. Донсков Ю.Е., Дюндиков Е.Т., Качкин А.А. Методика комплексной оценки состояния информационной безопасности региональной группировки войск. / М.: Военная мысль, 2009, №10, стр. 16-27];
формирование матриц состояния МПО (форма матрицы приведена в таблице 3), первые элементы всех строк которых соответствуют значениям  моментов окончания измерений значений параметров МПО, а остальные элементы - вычисленным в соответствии с соотношением (1) значениям признаков соответствия
моментов окончания измерений значений параметров МПО, а остальные элементы - вычисленным в соответствии с соотношением (1) значениям признаков соответствия  или признаков несоответствия
или признаков несоответствия  фактических значений параметров состояния МПО допустимым;
фактических значений параметров состояния МПО допустимым;
до начала мониторинга в ЦОУ 3 формируют базу данных, содержащую:
идентификаторы ID={IS, IO, IY}, где IS={ISη} - идентификаторы КИА, IO={IOi}, i=1, …, I - идентификаторы МПО и IY={yij} - идентификаторы контролируемых параметров МПО;
совокупность правил, обеспечивающих:
оценку затрат времени {Δij} СВ на изменение (коррекцию) предельных { или
или  } значений параметров МПО до допустимых {
} значений параметров МПО до допустимых { или
или  } значений, которая может быть произведена, например, по методике, изложенной в [5. Дюндиков Е.Т., Качкин А.А. Технология динамической интеграции и представления разнородных данных для анализа и оценки состояния многопараметрических объектов. / М.: Информационные технологии, 2010, №2(162), стр. 66-73];
} значений, которая может быть произведена, например, по методике, изложенной в [5. Дюндиков Е.Т., Качкин А.А. Технология динамической интеграции и представления разнородных данных для анализа и оценки состояния многопараметрических объектов. / М.: Информационные технологии, 2010, №2(162), стр. 66-73];
вычисление блоком 3.1 критических значений { или
или  } признаков несоответствия в соответствии с выражениями:
} признаков несоответствия в соответствии с выражениями:


где  и - предельные значения параметров МПО;
и - предельные значения параметров МПО;
формирование блоком 3.2 матриц оперативности коррекции состояния МПО (форма матрицы приведена в таблице 4), в первые элементы всех строк которых вносят номера СВ, первым элементам столбцов матриц присваивают критические { или
или  } значения признаков несоответствия, а остальным элементам - вычисленные значения затрат времени {Δtij} коррекцию предельных значений параметров МПО, если СВ обеспечивает коррекцию соответствующего предельного параметра МПО, или нулевые значения в противном случае;
} значения признаков несоответствия, а остальным элементам - вычисленные значения затрат времени {Δtij} коррекцию предельных значений параметров МПО, если СВ обеспечивает коррекцию соответствующего предельного параметра МПО, или нулевые значения в противном случае;
объединение заданного количества принятых от КИА 2 матриц состояния МПО (форма матрицы приведена в таблице 3) с последующим выделением фактических значений признаков несоответствия  и значений
и значений  времени окончания измерений параметров состояния МПО на соответствующем КИА;
времени окончания измерений параметров состояния МПО на соответствующем КИА;
получение известным методом, описанным, например, в [6. Литвинчук С.Ю. Информационные технологии в экономике. Анализ и прогнозирование временных рядов с помощью Excel, уч. пособие Нижегород. Гос. архит.-строит. ун-т., Н. Новгород ННГАСУ, 2010, 78 с.] видов функциональных зависимостей признаков несоответствия от времени;
вычисление по установленным функциональным зависимостям прогнозных значений  моментов времени достижения критических { или } значений признаков несоответствия;
моментов времени достижения критических { или } значений признаков несоответствия;
выбор из матрицы оперативности коррекции состояния МПО средств воздействия, обеспечивающих максимальные значения допустимых временных интервалов упреждающего реагирования на критические значения признаков несоответствия МПО:

формирование управляющих решений (приказов, распоряжений и т.д.), содержащих типы средств воздействия, идентификаторы контролируемых параметров МПО и моменты начала коррекции их текущих аномальных значений;
передачу управляющих решений на средства воздействия.
В целом совокупность приведенных на фигуре 1 технических средств работает следующим образом. Постоянно находящиеся в активном режиме датчики комплектов измерительной аппаратуры 2 с заданной периодичностью {tn}, n=1, …, Nη измеряют значения параметров МПО. При появлении на одном или нескольких нечетных входах элементов «И» выходных сигналов от соответствующих датчиков КИА 2 происходит срабатывание соответствующих элементов «И» с последующей оценкой в вычислителе блока 2.2 по указанным в [4] правилам признаков соответствия  и признаков несоответствия
и признаков несоответствия  фактических значений параметров состояния МПО допустимым. Далее полученные оценки
фактических значений параметров состояния МПО допустимым. Далее полученные оценки  и
и  включают в матрицы состояния МПО (см. таблицу 3) и добавляют в матрицы временные метки, соответствующие заданным значениям
включают в матрицы состояния МПО (см. таблицу 3) и добавляют в матрицы временные метки, соответствующие заданным значениям  времен окончания измерений датчиками КИА 2 значений параметров МПО. По мере наступления моментов времени {tn}, n=1, …, Nη передачи результатов оценки значений параметров МПО в ЦОУ 3 сформированные матрицы состояния передают в блок 3.1 ЦОУ 3 результаты оценки значений параметров МПО.
времен окончания измерений датчиками КИА 2 значений параметров МПО. По мере наступления моментов времени {tn}, n=1, …, Nη передачи результатов оценки значений параметров МПО в ЦОУ 3 сформированные матрицы состояния передают в блок 3.1 ЦОУ 3 результаты оценки значений параметров МПО.
При накопления в вычислителе блока 3.1 необходимого количества матриц состояния МПО происходит их объединение, затем определение видов функциональных зависимостей имеющихся в объединенной матрице признаков несоответствия значений параметров МПО допустимым от времени, далее с использованием полученных функциональных зависимостей вычисляют прогнозные оценки моментов времени  достижения критических значений признаков несоответствия { или } и передают вычисленные значения
достижения критических значений признаков несоответствия { или } и передают вычисленные значения  в блок 3.2, вычислитель которого производит выбор из матрицы оперативности коррекции состояния МПО средств воздействия, обеспечивающих максимальные значения заранее определенных в соответствии с соотношением (3) допустимых временных интервалов упреждающего реагирования на критические значения признаков несоответствия МПО, затем вычислитель блока 3.2 формирует управляющие решения (в виде приказов, распоряжений и т.д.), содержащие типы средств воздействия, идентификаторы контролируемых параметров МПО и моменты начала коррекции их текущих аномальных значений. По мере формирования управляющих решений они передаются на средства воздействия.
в блок 3.2, вычислитель которого производит выбор из матрицы оперативности коррекции состояния МПО средств воздействия, обеспечивающих максимальные значения заранее определенных в соответствии с соотношением (3) допустимых временных интервалов упреждающего реагирования на критические значения признаков несоответствия МПО, затем вычислитель блока 3.2 формирует управляющие решения (в виде приказов, распоряжений и т.д.), содержащие типы средств воздействия, идентификаторы контролируемых параметров МПО и моменты начала коррекции их текущих аномальных значений. По мере формирования управляющих решений они передаются на средства воздействия.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и материалы.
Возможность осуществления предлагаемого способа комплексного мониторинга и управления состоянием многопараметрического объекта подтверждается следующим примером.
Пример. Предположим, что в заданных t={t1=1 ч, t2=2 ч, …, t5=5 ч} временных интервалах необходимо провести мониторинг состояния МПО, имеющего 16 параметров, наименование, допустимые и предельные значения которых приведены в таблице 1, и по результатам мониторинга сформировать управляющие решения по изменению (коррекции) текущих аномальных значений параметров МПО.
В таблице 2 приведены наименования, идентификаторы и оцененные значения параметров МПО, а в таблице 3 - значения признаков соответствия  или признаков несоответствия
или признаков несоответствия  значений параметров МПО допустимым, определенные по приведенным в [4] соотношениям с использованием приведенных в таблице 1 допустимых значений охваченных мониторингом параметров МПО.
значений параметров МПО допустимым, определенные по приведенным в [4] соотношениям с использованием приведенных в таблице 1 допустимых значений охваченных мониторингом параметров МПО.
В таблице 4 приведены определенные по приведенным в [5] соотношениям для конкретных СВ значения затрат времени {Δtij} на изменение (коррекцию) приведенных в таблице 2 предельных { или } значений параметров МПО.
С использованием средств построения графиков Excel [6] для ряда значений признаков несоответствия строят графики их (признаков) изменения во времени, например, четвертого параметра МПО: количества источников ИК-излучений в составе второго элемента МПО ( или
или  ) во времени и устанавливают, что для данного параметра наиболее вероятной функциональной зависимостью значений данного параметра от времени является
) во времени и устанавливают, что для данного параметра наиболее вероятной функциональной зависимостью значений данного параметра от времени является  , т.е. экспоненциальная зависимость. При этом установлено, что данной зависимости соответствует максимальное значение коэффициента детерминации R^2=0,9861.
, т.е. экспоненциальная зависимость. При этом установлено, что данной зависимости соответствует максимальное значение коэффициента детерминации R^2=0,9861.
По установленной функциональной зависимости находим прогнозное значение  моментов времени достижения критического {
моментов времени достижения критического { } значение признака несоответствия:
} значение признака несоответствия:

Выбираем с использованием выражения (3) и таблицы 4 средство воздействия №2, функциональные характеристики которого обеспечивают максимальное значение max ΔT4=7,03-5-0,5=1,53 ч допустимого временного интервала упреждающего реагирования на аномальные значения четвертого параметра МПО.
Формируем управляющее решение средству воздействия №2: «Приступить к уменьшению количества источников ИК-излучений в составе второго элемента МПО до 5 источников не позднее 6 часов».
Способ комплексного мониторинга и управления состоянием многопараметрического объекта, заключающийся в измерении параметров многопараметрического объекта (МПО) в заданные временные интервалы, допусковой оценке измеренных значений параметров и формировании матрицы состояния МПО, отличающийся тем, что заранее до начала мониторинга задают моменты окончания измерений параметров МПО, задают совокупность средств воздействия, обеспечивающих изменение (коррекцию) предельных значений параметров МПО до допустимых значений, определяют для каждого средства воздействия затраты времени на изменение (коррекцию) предельных значений параметров МПО, определяют критические значения признаков несоответствия значений параметров МПО допустимым, формируют матрицу оперативности коррекции состояния МПО, в ходе мониторинга, по мере формирования заранее установленного количества объединяют матрицы состояния МПО, определяют по объединенной матрице состояния МПО фактические значения признаков несоответствия значений параметров МПО допустимым и моменты времени окончания измерений, устанавливают виды функциональных зависимостей признаков несоответствия значений параметров МПО допустимым от времени, определяют для установленных функциональных зависимостей прогнозные оценки моментов времени достижения критических значений признаков несоответствия значений параметров МПО допустимым, выбирают из матрицы оперативности коррекции состояния МПО средства воздействия, обеспечивающие максимальные значения допустимых временных интервалов упреждающего реагирования на аномальные значения параметров МПО, формируют управляющие решения и передают их на средства воздействия.
Способ амплитудного двухмерного пеленгования
Способ обеспечения посадки вертолета
Теплообменный аппарат
Способ определения процентного соотношения жидкой фазы в криогенном газожидкостном потоке
Способ ультразвукового контроля твердости полимеров
Способ извлечения тирозина и витамина b из водного раствора
Несущий винт вертолета
Глиссадный радиомаяк
Способ навигации подвижного объекта
Полосовой усилитель
Способ амплитудного двухмерного пеленгования
Способ обеспечения посадки вертолета
Теплообменный аппарат
Способ определения процентного соотношения жидкой фазы в криогенном газожидкостном потоке
Способ ультразвукового контроля твердости полимеров
Способ извлечения тирозина и витамина b из водного раствора
Несущий винт вертолета
Глиссадный радиомаяк
Способ навигации подвижного объекта
Полосовой усилитель

