Результат интеллектуальной деятельности: СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к управлению работой двигателя и в частности к регулированию подачей воздуха к двигателю.
Уровень техники
Модуль управления силовой цепью двигателя может быть сконфигурирован, чтобы вычислять требуемое положение дроссельной заслонки на основании условий работы двигателя, и положение дроссельной заслонки может быть соответствующим образом отрегулировано. Посредством регулирования положения дроссельной заслонки фактическая скорость всасываемого воздушного потока может смещаться к заданной скорости воздушного потока. Заданное положение дроссельной заслонки и, следовательно, заданная скорость воздушного потока могут регулироваться, чтобы компенсировать потребности в разрежении во впускном коллекторе для вакуумных приводов, таких как тормозной усилитель транспортного средства.
Один примерный подход для управления дроссельной заслонкой, принимая во внимание потребность в разрежении для тормозного усилителя, показан Каннингемом и др. в US 2011/0183812. В данном документе положение дроссельной заслонки регулируется в ответ на скорость течения воздуха от тормозного усилителя во впускной коллектор так, чтобы поддерживать давление во впускном коллекторе, по существу, постоянным. Например, дроссельная заслонка закрывается, когда тормозной усилитель пополняется разрежением из впускного коллектора.
Однако авторы в данном документе увидели потенциальные проблемы, связанные с таким подходом. В качестве примера, из-за регулирования положения дроссельной заслонки, чтобы достигать требуемой мгновенной скорости воздушного потока во впускном коллекторе, может оказываться влияние на среднюю требуемую скорость воздушного потока. В частности, даже если достигается мгновенная скорость воздушного потока (после обрезания для минимально эффективного ограничения области) и достигается заданное положение дроссельной заслонки, могут появляться существенные погрешности между средней фактической скоростью воздушного потока и скоростью воздушного потока, которая была бы задана, если минимальное эффективное ограничение области дроссельной заслонки не было удовлетворено. В результате могут формироваться нарушения объема воздуха в двигателе (например, недросселированный поток воздуха), когда воздух перебрасывается от тормозного усилителя во впускной коллектор двигателя.
В качестве другого примера, во время применения педали тормоза могут требоваться отрицательные углы дроссельной заслонки, чтобы уменьшать изменение давления коллектора. Поскольку отрицательные углы невозможны вследствие физических ограничений дроссельной заслонки, у Каннингема и др. дроссельная заслонка удерживается закрытой, пока задается отрицательный угол дроссельной заслонки. Затем, когда педаль тормоза отпускается, и задается увеличение угла дроссельной заслонки, дроссельная заслонка переходит в заданное положение. Однако, поскольку отрицательный угол дроссельной заслонки не достигается, погрешности угла дроссельной заслонки могут сохраняться, что, в свою очередь, может вести к существенным погрешностям в объеме воздуха в двигателе. Нарушения объема воздуха в двигателе могут увеличивать выбросы двигателя и могут быть заметны водителю. Дополнительно, достигнутое разрежение во впускном коллекторе не является настолько низким, каким могло бы быть, если бы была достигнута средняя скорость потока воздуха.
Раскрытие изобретения
В одном примере некоторые из вышеописанных проблем могут быть, по меньшей мере, частично разрешены способом управления двигателем, содержащим регулирование сигнала, указывающего заданное положение дроссельной заслонки, с помощью коррекции на основании суммарной погрешности скорости воздушного потока. Затем дроссельная заслонка может быть приведена в отрегулированное положение дроссельной заслонки. Таким образом, суммарные погрешности угла дроссельной заслонки и погрешности скорости воздушного потока могут быть уменьшены.
Например, пока двигатель работает, контроллер может непрерывно изменять заданное положение дроссельной заслонки с помощью поправочного коэффициента (например, добавочного коэффициента), который основан на погрешности между фактической скоростью воздушного потока через дроссельную заслонку (или фактическим положением/углом дроссельной заслонки) и заданной скоростью воздушного потока через дроссельную заслонку (или заданным положением/углом дроссельной заслонки). Кроме того, поправочный коэффициент может непрерывно обновляться на основании данных обратной связи. Таким образом, погрешность может, по существу, быть уменьшена до нуля, а в среднем фактическое положение дроссельной заслонки может сводиться к неограниченному заданному положению дроссельной заслонки.
Кроме того, во время переходных состояний педали (например, во время переходного состояния педали тормоза) положение дроссельной заслонки может быть отрегулировано с помощью коррекции, чтобы уменьшать суммарную погрешность. Например, если задается отрицательный угол дроссельной заслонки, дроссельная заслонка может быть закрыта, пока команда отрицательного угла дроссельной заслонки удерживается. Затем, когда впоследствии задается увеличение угла дроссельной заслонки, угол дроссельной заслонки может специально увеличиваться с более медленной скоростью, чем требуется. Посредством замедления скорости увеличения угла дроссельной заслонки погрешность угла дроссельной заслонки, возникающая, пока отрицательный угол дроссельной заслонки был задан (но не предоставлен), может быть компенсирована. Таким образом, погрешности скорости воздушного потока через дроссельную заслонку и погрешности угла дроссельной заслонки могут быть уменьшены. По существу, устраняя погрешности скорости воздушного потока через дроссельную заслонку, могут быть уменьшены возмущения воздуха в двигателе. В целом, характеристики двигателя и выбросы могут быть улучшены.
В одном аспекте изобретения раскрыт способ для двигателя, включающий этапы, на которых: регулируют сигнал, указывающий заданное положение дроссельной заслонки, с помощью коррекции на основании суммарной погрешности скорости воздушного потока; и приводят дроссельную заслонку в отрегулированное положение дроссельной заслонки.
В дополнительных аспектах также раскрыто, что регулирование на основании суммарной погрешности скорости воздушного потока включает в себя этап, на котором выполняют регулирование с помощью коррекции, чтобы уменьшать суммарную погрешность скорости воздушного потока, по существу, до нуля; дополнительно уменьшают суммарную погрешность скорости воздушного потока посредством уменьшения суммарной погрешности угла дроссельной заслонки до нуля; суммарная погрешность скорости воздушного потока включает в себя погрешность скорости воздушного потока, суммированную по числу циклов двигателя; суммарная погрешность скорости воздушного потока включает в себя погрешность скорости воздушного потока, суммированную в течение времени работы двигателя; суммарная погрешность скорости воздушного потока основана на оценке давления воздуха в коллекторе; оценка давления воздуха в коллекторе регулируется во время переходного состояния педали тормоза и/или переходного состояния педали акселератора на основании скорости потока воздуха, протекающего во впускной коллектор двигателя; регулирование сигнала, указывающего заданное положение дроссельной заслонки, включает в себя этапы, на которых, во время переходного состояния педали, когда заданное положение дроссельной заслонки находится вне ограничения положения дроссельной заслонки, увеличивают положение дроссельной заслонки от предела в течение интервала времени, пока суммарная погрешность скорости воздушного потока не уменьшится до нуля, и затем приводят дроссельную заслонку в отрегулированное положение дроссельной заслонки.
В другом аспекте изобретения раскрыт способ для двигателя, включающий этап, на котором: во время работы двигателя изменяют заданное положение дроссельной заслонки с помощью коррекции на основании заданной скорости воздушного потока через дроссельную заслонку и фактической средней скорости воздушного потока через дроссельную заслонку, чтобы обеспечивать, по существу, нулевую суммарную погрешность скорости воздушного потока, одновременно выполняя отслеживание требуемого угла дроссельной заслонки.
В дополнительных аспектах также раскрыто, что изменение включает в себя этап, на котором непрерывно изменяют заданное положение дроссельной заслонки во время работы двигателя; фактическая средняя скорость воздушного потока через дроссельную заслонку основана на давлении воздуха во впускном коллекторе; суммарная погрешность скорости воздушного потока включает в себя погрешность скорости воздушного потока, суммированную по числу циклов двигателя; дополнительно приводят дроссельную заслонку в измененное положение дроссельной заслонки; дополнительно, во время переходного состояния педали, когда положение дроссельной заслонки задается как уменьшающееся за пределы ограничения положения дроссельной заслонки, уменьшают положение дроссельной заслонки до предельного положения дроссельной заслонки и, во время последующего заданного увеличения положения дроссельной заслонки, специально увеличивают положение дроссельной заслонки с более медленной скоростью, чем задано; педаль включает в себя педаль тормоза и/или педаль акселератора; дополнительно, во время переходного состояния педали, когда положение дроссельной заслонки задается как уменьшающееся за пределы ограничения положения дроссельной заслонки, уменьшают положение дроссельной заслонки до предельного положения дроссельной заслонки, и во время последующего заданного увеличения в положении дроссельной заслонки, специально увеличивают положение дроссельной заслонки от предельного положения дроссельной заслонки в течение периода времени, пока суммарная погрешность скорости воздушного потока не уменьшится, по существу, до нуля; дополнительно, после упомянутого периода времени, увеличивают положение дроссельной заслонки до заданного положения дроссельной заслонки.
В другом аспекте изобретения раскрыта система транспортного средства, содержащая: двигатель, содержащий впускной коллектор и выпускной коллектор; дроссельную заслонку, расположенную во впускном коллекторе; педаль тормоза; датчик давления в коллекторе, расположенный во впускном коллекторе ниже по потоку от дроссельной заслонки; и контроллер с машиночитаемыми инструкциями для выполнения этапов, на которых: во время работы двигателя, оценивают погрешность угла дроссельной заслонки на основании заданной скорости воздушного потока через дроссельную заслонку относительно фактической скорости воздушного потока через дроссельную заслонку; суммируют погрешность угла дроссельной заслонки в течение периода выборки; изменяют заданное положение дроссельной заслонки с помощью поправочного коэффициента, что приводит суммарную погрешность угла дроссельной заслонки, по существу, к нулю; и приводят дроссельную заслонку в измененное положение дроссельной заслонки.
В дополнительном аспекте раскрыто, что период выборки включает в себя множество циклов двигателя или период времени работы двигателя; контроллер включает в себя дополнительные инструкции для выполнения этапов, на которых: в ответ на первое переходное состояние педали тормоза, когда заданное положение дроссельной заслонки находится за пределами нижнего ограничения, уменьшают положение дроссельной заслонки до нижнего ограничения; и в ответ на второе переходное состояние педали тормоза, когда заданное положение дроссельной заслонки увеличивается, медленно увеличивают положение дроссельной заслонки от нижнего ограничения до тех пор, пока погрешность угла дроссельной заслонки не уменьшится, по существу, до нуля, и затем быстро увеличивают положение дроссельной заслонки до заданного положения дроссельной заслонки.
Вышеописанные преимущества и другие преимущества и признаки настоящего описания будут видны из последующего подробного описания, взятого отдельно или вместе с сопровождающими чертежами.
Следует понимать, что раскрытие изобретения, приведенное выше, предоставлено для ознакомления с упрощенной формой подборки концепций, которые дополнительно описаны в подробном описании изобретения. Оно не идентифицирует ключевые или существенные признаки заявленного предмета изобретения, объем которого однозначно определен формулой изобретения, которая сопровождает подробное описание. Более того, заявленный предмет изобретения не ограничен вариантами осуществления, которые решают какие-либо недостатки, отмеченные выше или в любой части этого описания.
Краткое описание чертежей
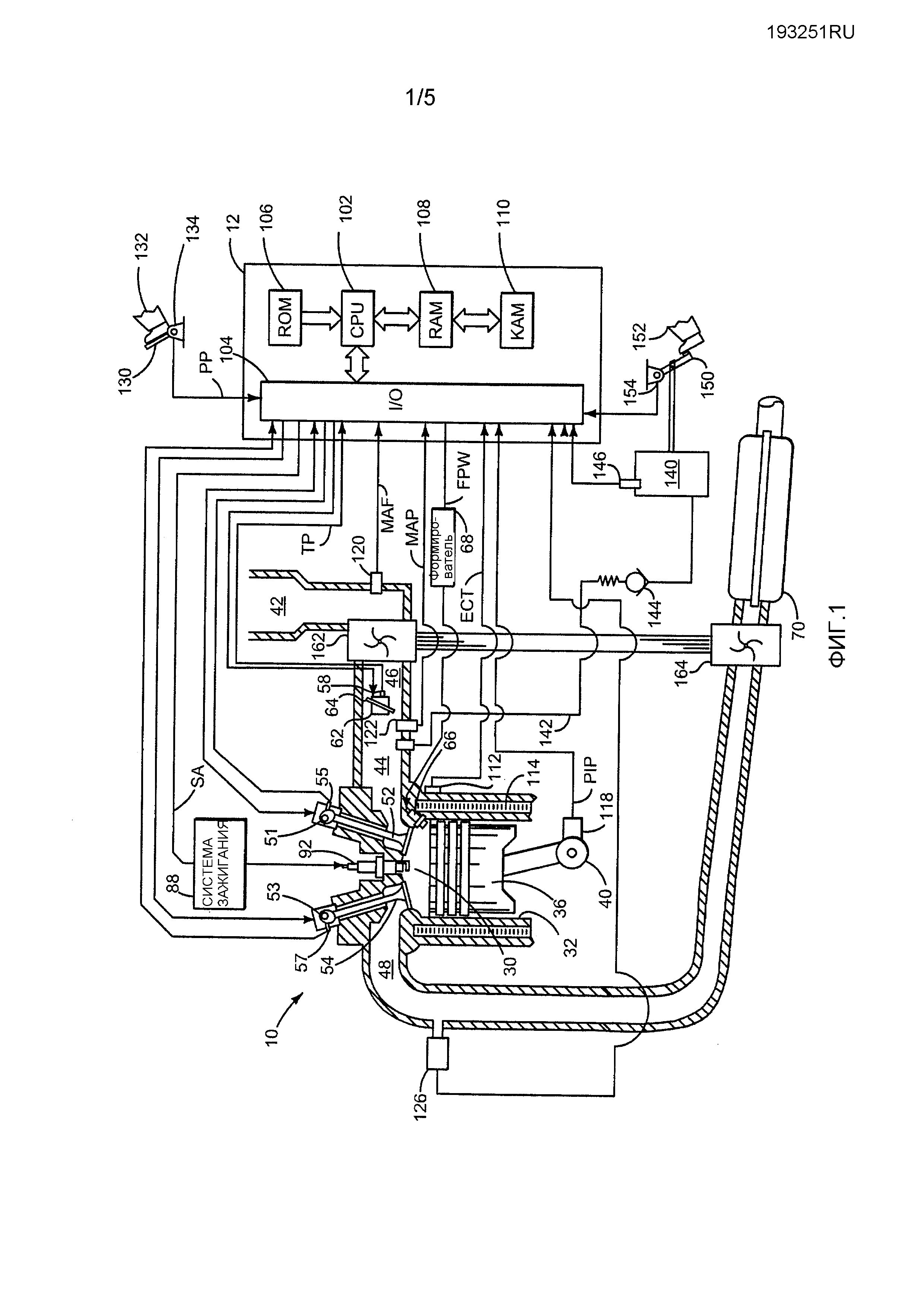
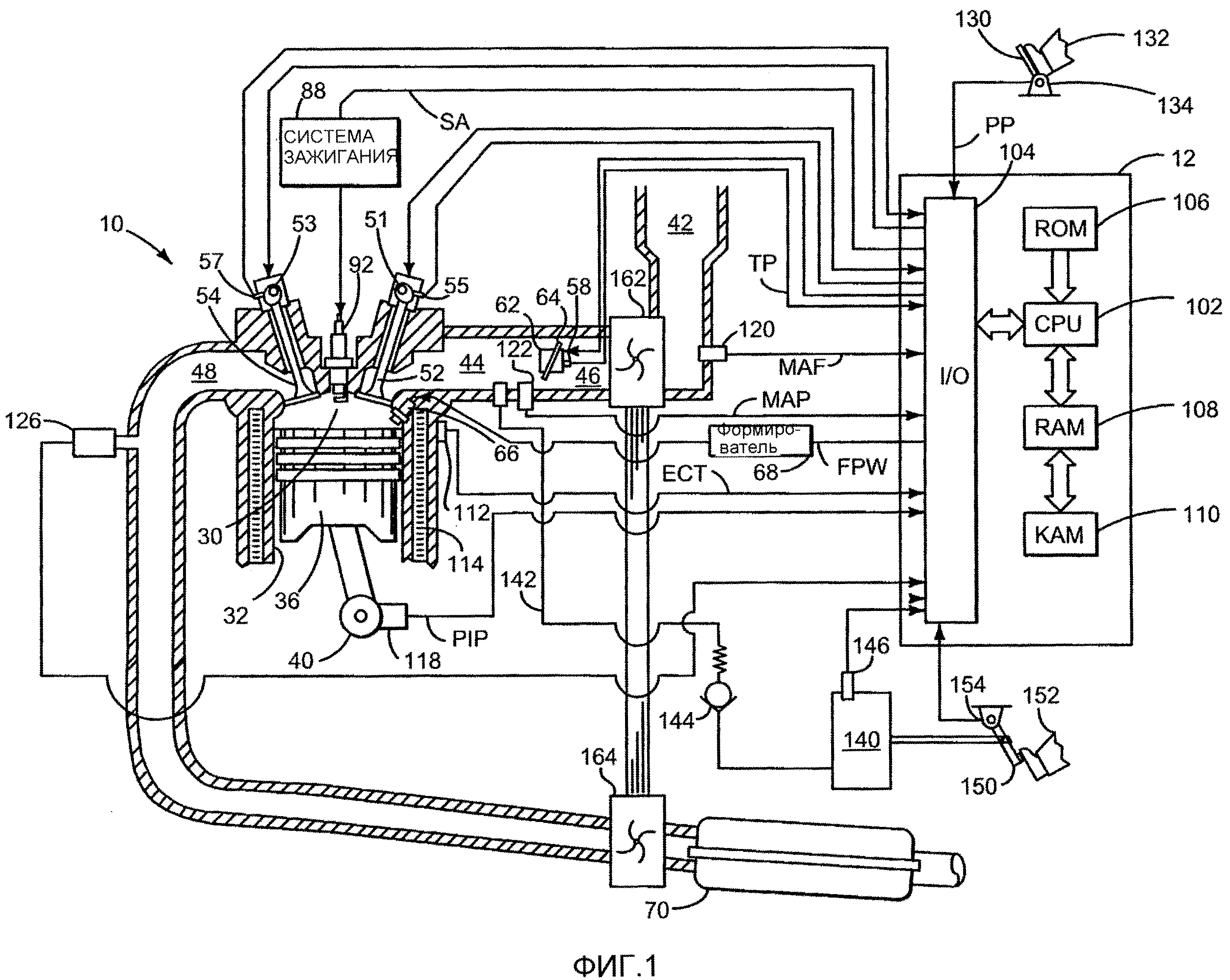
Фиг.1 показывает схематичное изображение двигателя.
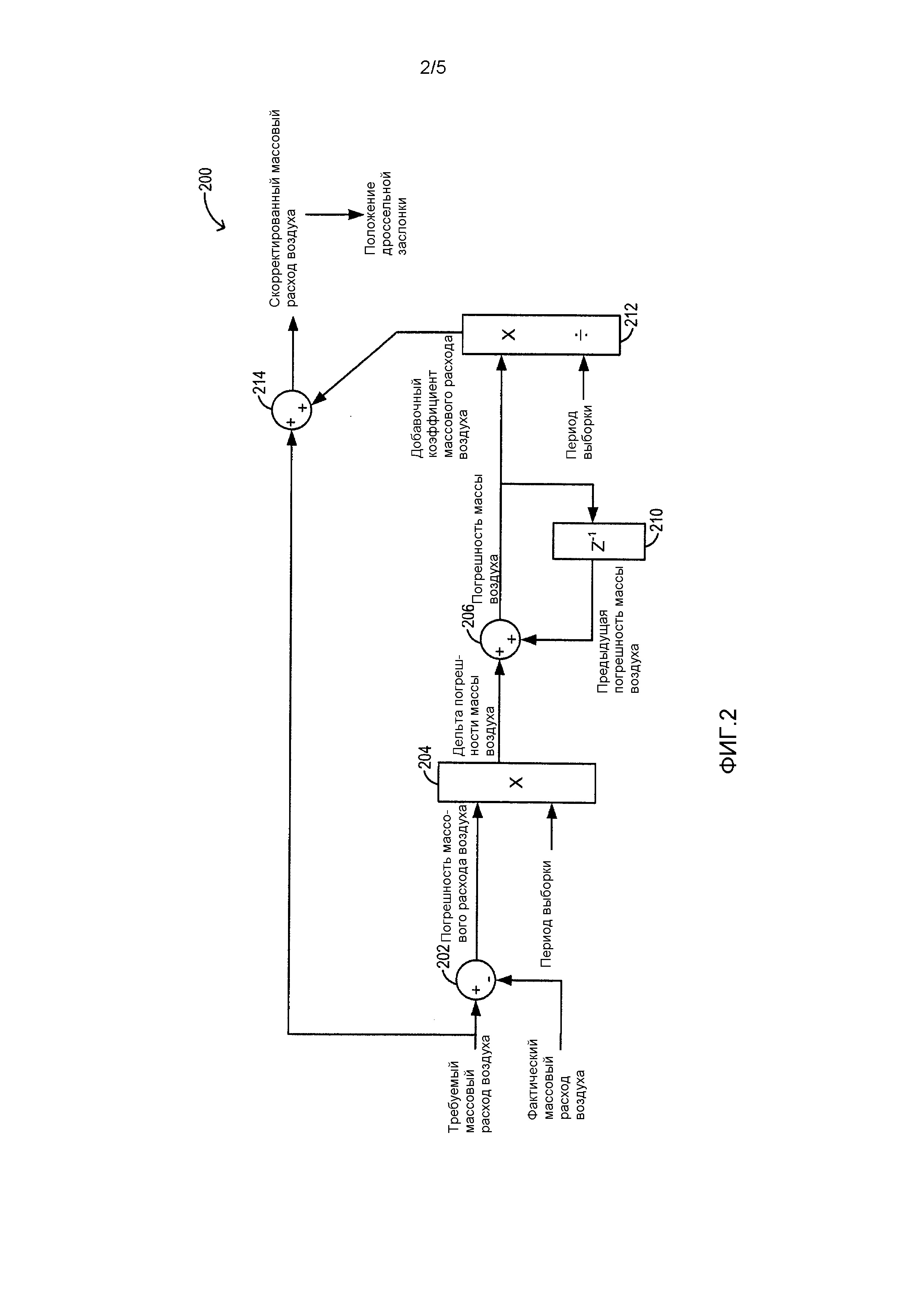
Фиг.2 показывает схематичное изображение алгоритма регулирования заданного массового расхода воздуха с помощью коррекции на основании суммарной погрешности массового расхода воздуха.
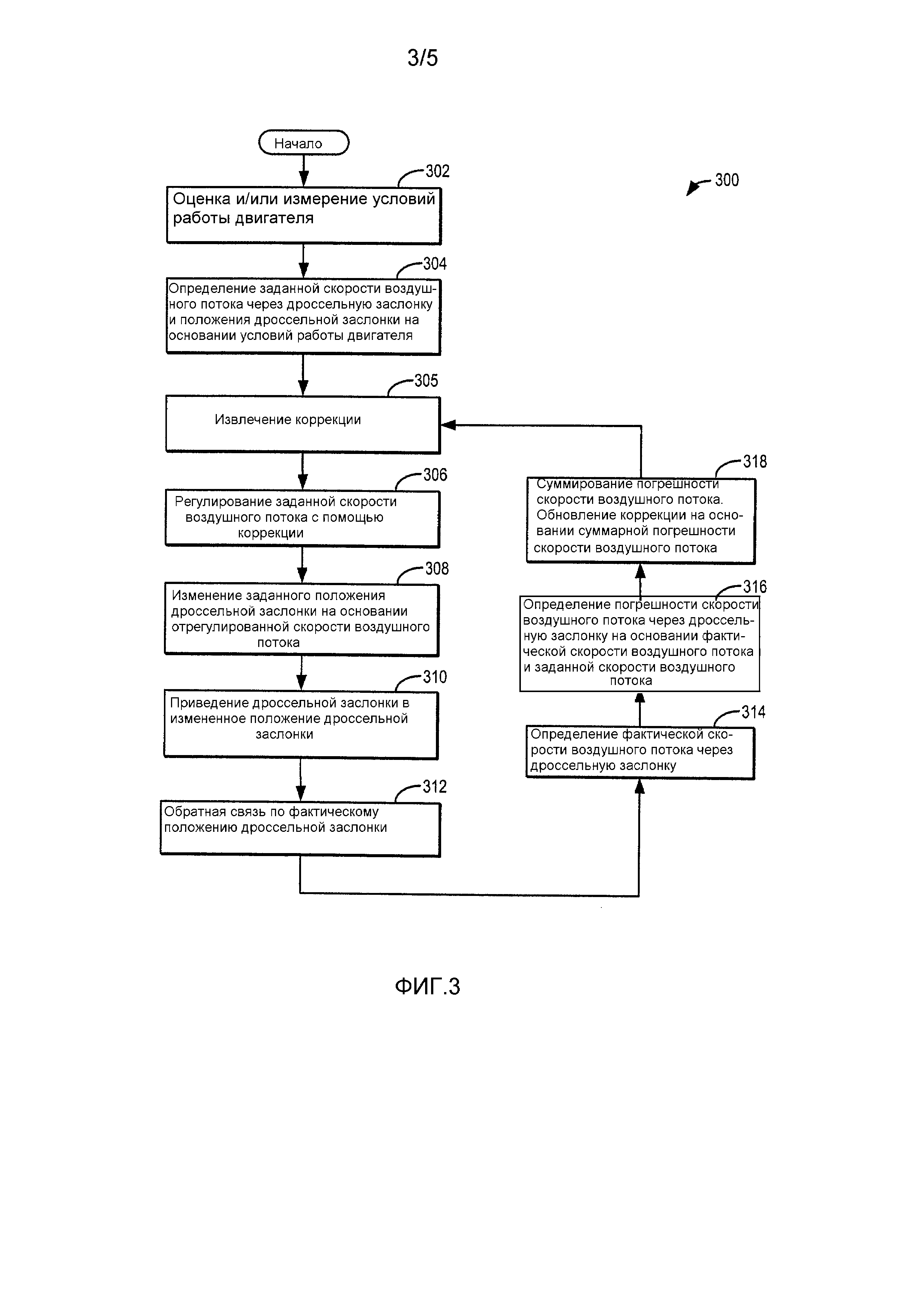
Фиг.3 показывает высокоуровневую блок-схему для непрерывного обновления поправочного коэффициента и регулирования заданного положения дроссельной заслонки с помощью обновленного поправочного коэффициента, чтобы уменьшать суммарную погрешность скорости воздушного потока.
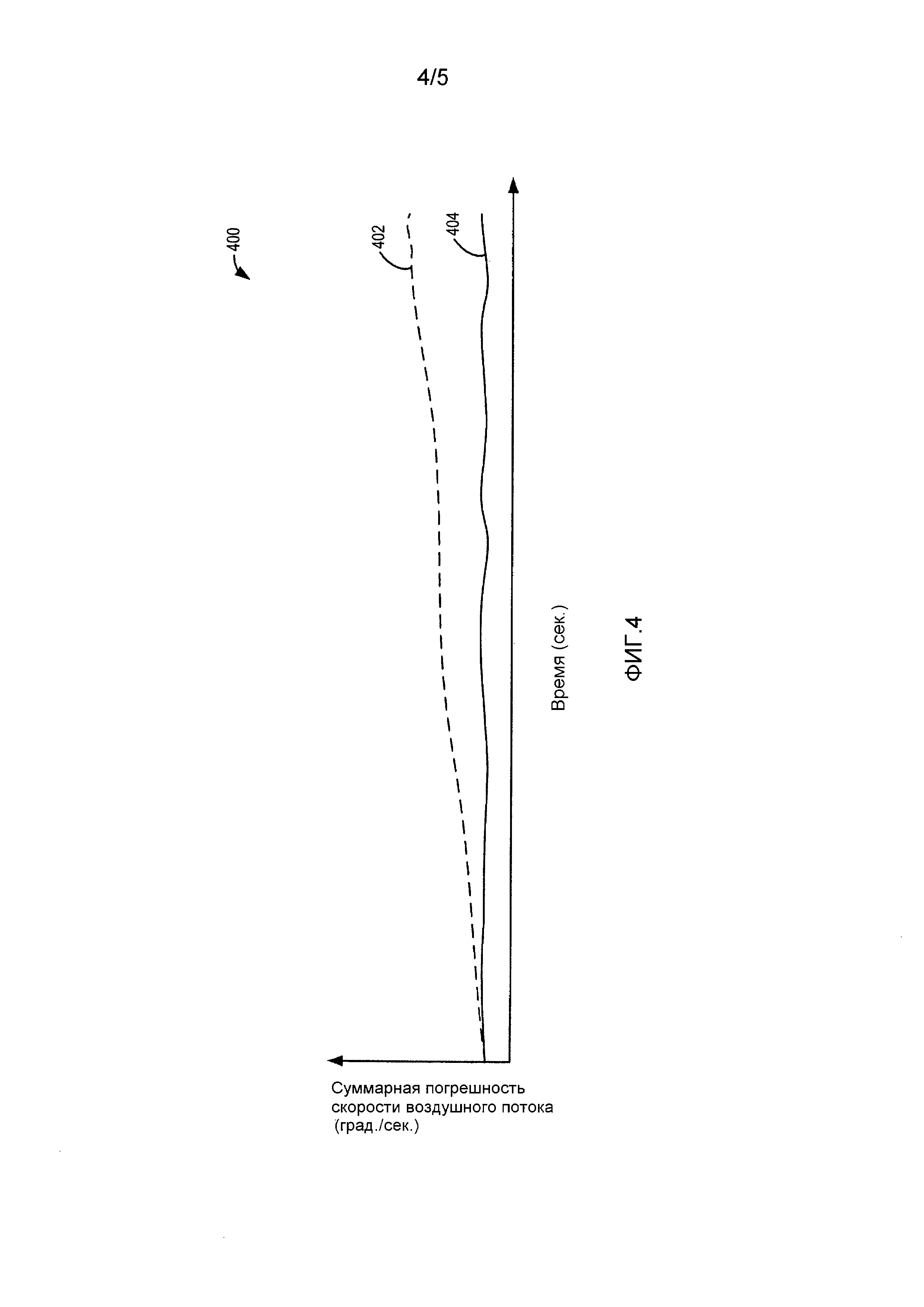
Фиг.4 показывает график, изображающий изменение в погрешности скорости воздушного потока для скорректированного положения дроссельной заслонки относительно неизмененного положения дроссельной заслонки.
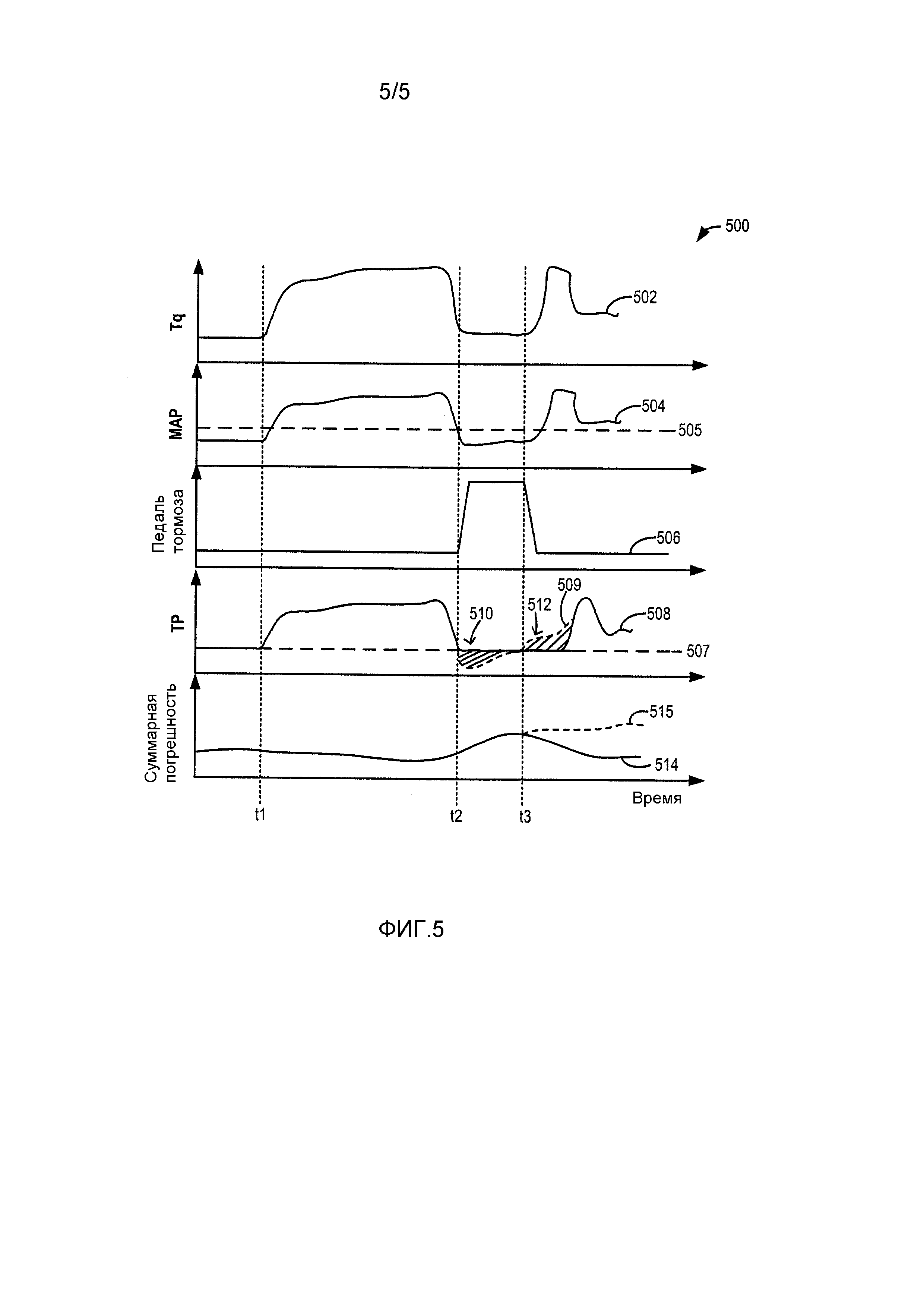
Фиг.5 показывает пример регулирования положения дроссельной заслонки во время переходного состояния педали на основании погрешности скорости воздушного потока согласно настоящему раскрытию.
Подробное описание изобретения
Настоящее описание относится к компенсации заданного положения дроссельной заслонки (например, в системе двигателя на фиг.1) для отклонений скорости воздушного потока с тем, чтобы обеспечивать, по существу, нулевую суммарную погрешность. Во время работы двигателя контроллер двигателя может непрерывно регулировать заданное положение дроссельной заслонки с помощью коррекции, такой как показанная на фиг.2, чтобы обеспечивать измененное положение дроссельной заслонки, что приводит суммарную погрешность скорости воздушного потока к нулю (как показано на фиг.4). Контроллер может выполнять управляющий алгоритм, такой как примерный способ на фиг.3, чтобы непрерывно регулировать заданное положение дроссельной заслонки с помощью коррекции, а также непрерывно обновлять коррекцию на основании данных обратной связи. Регулирование может выполняться во время переходных состояний педали (например, переходных состояний педали тормоза или акселератора), как показано в примере регулирования на фиг.5, чтобы также уменьшать погрешности угла дроссельной заслонки. Таким образом, может отслеживаться требуемый угол дроссельной заслонки, в то время как погрешности скорости воздушного потока уменьшаются. За счет уменьшения возмущений воздуха в двигателе характеристики двигателя улучшаются через улучшения как в управлении соотношением топливо/воздух, так и в возможности обеспечения разрежения во впускном коллекторе.
Согласно фиг.1 двигатель 10 внутреннего сгорания, содержащий множество цилиндров, один цилиндр из которых показан на фиг.1, управляется электронным контроллером 12 двигателя. Двигатель 10 включает в себя камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, расположенным в нем и соединенным с коленчатым валом 40. Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным коллектором 48 через соответствующий впускной клапан 52 и выпускной клапан 54. Каждый впускной и выпускной клапан может быть задействован посредством впускного кулачка 51 и выпускного кулачка 53. Альтернативно, один или более из впускных и выпускных клапанов может быть задействован посредством управляемой электромеханическим образом катушки и якоря клапана в сборе. Положение впускного кулачка 51 может быть определено датчиком 55 впускного кулачка. Положение выпускного кулачка 53 может быть определено датчиком 57 выпускного кулачка.
Топливный инжектор 66 показан расположенным так, чтобы впрыскивать топливо непосредственно в цилиндр 30, что известно специалистам в данной области техники как прямой впрыск. Альтернативно, топливо может впрыскиваться во впускной канал, что известно специалистам в данной области техники как впрыск во впускной канал. Топливный инжектор 66 доставляет жидкое топливо пропорционально ширине импульса сигнала FPW от контроллера 12. Топливо доставляется к топливному инжектору 66 топливной системой (не показана), включающей в себя топливный бак, топливный насос и топливную рампу (не показана). Топливный инжектор 66 снабжается рабочим током от формирователя 68, который реагирует на сигналы контроллера 12. Кроме того, впускной коллектор 44 показан сообщающимся с необязательной дроссельной заслонкой 62 с электроприводом, которая регулирует положение дроссельной пластины 64, чтобы управлять воздушным потоком из приемной камеры 46 усилителя. Компрессор 162 всасывает воздух из воздухозаборника 42, чтобы подавать его в камеру 46 усилителя. Отработавшие газы вращают турбину 164, которая соединена с компрессором 162. Двустадийная топливная система высокого давления может быть использована, чтобы создавать более высокие уровни давления топлива в инжекторах 66. Впускной коллектор 44 также обеспечивает разрежение для тормозного усилителя 140 через трубопровод 142. Запорный клапан 144 обеспечивает протекание воздуха из тормозного усилителя 140 во впускной коллектор 44, а не из впускного коллектора 44 в тормозной усилитель 140. Тормозной усилитель 140 увеличивает усилие, предоставляемое ногой 152 через педаль 150 тормоза к главному цилиндру (не показан), для использования тормозов транспортного средства (не показаны).
Бесконтактная система 88 зажигания предоставляет искру зажигания в камеру 30 сгорания через свечу 92 зажигания в ответ на сигнал контроллера 12. Универсальный датчик 126 содержания кислорода в отработавшем газе (UEGO) показан соединенным с выпускным коллектором 48 выше по потоку от каталитического нейтрализатора 70. Альтернативно, вместо UEGO-датчика 126 может использоваться датчик содержания кислорода в отработавшем газе с двумя устойчивыми состояниями.
Катализатор 70 может включать в себя множество блоков каталитического нейтрализатора в одном примере. В другом примере может быть использовано множество устройств управления выбросами, каждое с множеством блоков. Каталитический нейтрализатор 70 может быть каталитическим нейтрализатором трехкомпонентного типа в одном примере.
Контроллер 12 показан на фиг.1 как традиционный микрокомпьютер, включающий в себя: микропроцессор 102, порты 104 ввода/вывода, постоянное запоминающее устройство 106, оперативное запоминающее устройство 108, энергонезависимую память 110 и традиционную шину данных. Как показано, контроллер 12 принимает различные сигналы от датчиков, присоединенных к двигателю 10, в дополнение к ранее описанным сигналам, в том числе: температуру охлаждающей жидкости двигателя (ECT) от температурного датчика 112, присоединенного к охлаждающему трубопроводу 114; датчик 134 положения, соединенный с педалью 130 акселератора для обнаружения положения акселератора, регулируемого ногой 132; датчик 154 положения, соединенный с педалью 150 тормоза для обнаружения положения педали тормоза, датчик 146 давления для обнаружения разрежения тормозного усилителя; датчик давления (не показан) для обнаружения давления главного цилиндра (например, давления гидравлического тормоза); датчик детонации для определения воспламенения остаточных газов (не показан); показатель давления в коллекторе двигателя (MAP) от датчика 122 давления, соединенного с впускным коллектором 44; положение коленчатого вала двигателя, измеренное датчиком 118 Холла, обнаруживающим положение коленчатого вала 40; показатель воздушной массы, входящей в двигатель, от датчика 120 (например, термоанемометра); и показатель положения дроссельной заслонки от датчика 58. Также может быть определено (датчик не показан) атмосферное давление для обработки контроллером 12. В предпочтительном аспекте настоящего описания датчик 118 положения коленчатого вала двигателя создает предварительно определенное число равноотстоящих импульсов при каждом полном обороте коленчатого вала, из которых может быть определена скорость вращения двигателя (RPM).
Как разъясняется в данном документе со ссылкой на фиг.2-3, во время работы двигателя контроллер 12 может регулировать заданное положение дроссельной заслонки с помощью коррекции, чтобы приводить погрешность угла дроссельной заслонки (или погрешность скорости воздушного потока через дроссельную заслонку), суммированную в течение периода выборки (например, в течение определенного числа циклов двигателя или определенной продолжительности работы двигателя), по существу, к нулю. Это гарантирует, что в среднем дроссельная заслонка фактически находится в положении, которое задается. За счет снижения погрешностей в скорости воздушного потока, при одновременном отслеживании требуемого угла дроссельной заслонки, уменьшаются возмущения воздуха в двигателе, даже при наличии переходных состояний педали тормоза и/или педали акселератора.
В некоторых вариантах осуществления двигатель может быть соединен с системой электромотора/аккумуляторной батареи в гибридном транспортном средстве. Гибридное транспортное средство может иметь параллельную конфигурацию, последовательную конфигурацию или их вариант или комбинацию. Дополнительно, в некоторых вариантах осуществления, могут быть применены другие конфигурации двигателя, например, дизельный двигатель.
Во время работы каждый цилиндр в двигателе 10 типично совершает четырехтактный цикл: цикл включает в себя такт впуска, такт сжатия, такт расширения и такт выпуска. В течение такта впуска, как правило, выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух впускается в камеру 30 сгорания через впускной коллектор 44, и поршень 36 движется к низу цилиндра с тем, чтобы увеличивать объем в камере 30 сгорания. Положение, в котором поршень 36 находится рядом с нижней частью цилиндра и в конце своего хода (например, когда камера 30 сгорания имеет свой наибольший объем), типично называется специалистами в области техники нижней мертвой точкой (BDC). Во время такта сжатия, впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 движется к головке цилиндра с тем, чтобы сжимать воздух в камере 30 сгорания. Точка, в которой поршень 36 находится в конце своего хода и наиболее близко к головке цилиндра (например, когда камера 30 сгорания имеет свой наименьший объем), типично называется специалистами в данной области техники верхней мертвой точкой (TDC). В процессе, далее в данном документе называемом впрыском, топливо вводится в камеру сгорания. В процессе, далее в данном документе, называемом зажиганием, впрыснутое топливо поджигается известным средством зажигания, таким как свеча 92 зажигания, приводя в результате к возгоранию. Во время такта расширения расширяющиеся газы толкают поршень 36 обратно к BDC. Коленчатый вал 40 преобразует перемещение поршня в крутящий момент вращающегося вала. Наконец, во время такта выпуска выпускной клапан 54 открывается, чтобы выпускать сгоревшую воздушно-топливную смесь в выпускной коллектор 48, и поршень возвращается к TDC. Отметим, что описанное выше является просто примером и что моменты открытия и/или закрытия впускного и выпускного клапанов могут изменяться, например, чтобы обеспечивать положительное или отрицательное перекрытие клапанов, более позднее закрытие впускного клапана или различные другие примеры.
Таким образом, система на фиг.1 предусматривает систему двигателя, сконфигурированную, чтобы регулировать сигнал, указывающий заданное положение дроссельной заслонки, с помощью коррекции на основании суммарной погрешности скорости воздушного потока и затем приводить дроссельную заслонку в отрегулированное положение дроссельной заслонки. Система двигателя включает в себя впускной коллектор и выпускной коллектор. Система двигателя дополнительно включает в себя дроссельную заслонку, расположенную во впускном коллекторе, педаль тормоза и датчик давления в коллекторе, расположенный во впускном коллекторе ниже по потоку от дроссельной заслонки. Контроллер с помощью машиночитаемых инструкций может, во время работы двигателя, оценивать погрешность угла дроссельной заслонки на основании заданной скорости воздушного потока через дроссельную заслонку относительно фактической скорости воздушного потока через дроссельную заслонку и суммировать погрешность угла дроссельной заслонки в течение периода выборки. Контроллер может затем изменять заданное положение дроссельной заслонки с помощью корректирования, что приводит суммарную погрешность угла дроссельной заслонки, по существу, к нулю перед приведением дроссельной заслонки в измененное положение дроссельной заслонки. Дополнительно, момент зажигания может регулироваться (например, замедляться), чтобы уменьшать крутящий момент или скорость вспышек, не полностью компенсированных посредством управления дроссельной заслонкой.
Фиг.2 показывает схематичное представление способа 200 для регулирования заданного положения дроссельной заслонки с помощью коррекции, чтобы уменьшать суммарную погрешность скорости воздушного потока, причем коррекция основана на данных обратной связи, касающихся скоростей воздушного потока и углов дроссельной заслонки. По существу, способ на фиг.2 является альтернативным изображением алгоритма на фиг.3. Этапы способа 200 могут выполняться контроллером двигателя с помощью машиночитаемых инструкций.
Во время работы двигателя требуемая скорость воздушного потока или массовый расход воздуха (desired_air_mass_rate) могут сравниваться с фактической скоростью воздушного потока или массовым расходом воздуха (actual_air_mass_rate), чтобы определять погрешность массового расхода воздуха (air_mass_rate_error). По существу, требуемая скорость воздушного потока может быть основана на условиях работы двигателя, таких как скорость вращения двигателя, требуемый крутящий момент, температура каталитического нейтрализатора выхлопа, давление в коллекторе (MAP) и т.д. В изображенном примере требуемый массовый расход воздуха и фактический массовый расход воздуха подаются в контроллер 202, чтобы определять погрешность массового расхода воздуха. В альтернативном варианте осуществления контроллер 202 может оценивать погрешность угла дроссельной заслонки, сравнивая заданную скорость воздушного потока через дроссельную заслонку относительно фактической скорости воздушного потока через дроссельную заслонку.
Определенная погрешность массового расхода воздуха (air_mass_rate_error) может суммироваться контроллером 204 в течение периода управления периода выборки (sampling_period). В одном варианте осуществления контроллер 204 может быть умножителем, который суммирует погрешность массового расхода воздуха в течение периода выборки, чтобы определять чистое изменение в погрешности массы воздуха (air_mass_error_delta). Альтернативные контроллеры двигателя могут конфигурироваться по массе для каждого угла двигателя вместо массы по времени. Для этих контроллеров время получения выборки переводится в угол выборки.
Изменение в погрешности массы воздуха при текущем запуске способа может быть сравнено контроллером 206 с погрешностью массы воздуха, определенной ранее (air_mass_error_previous), такой как погрешность массового расхода воздуха, определенная при непосредственно предыдущем запуске способа 200. На основании разницы контроллер 206 может оценивать чистую погрешность массы воздуха (air_mass_error). Погрешность массы воздуха может затем быть использована, чтобы определять коррекцию, такую как добавочный коэффициент, который может быть добавлен к требуемой массе воздуха, чтобы приводить погрешность массы воздуха, по существу, к нулю. Кроме того, определенная погрешность массы воздуха может быть сохранена в Z-преобразовании 210 и найдена во время последующего запуска способа 200. По существу, во время последующего запуска способа 200 текущая погрешность массы воздуха, сохраненная в Z-преобразовании 210, может быть найдена, чтобы указывать предыдущую погрешность массы воздуха (air_mass_error_previous).
Чистая погрешность массы воздуха (air_mass_error) может затем суммироваться контроллером 212 в течение периода выборки (sampling_period), чтобы определять коррекцию, такую как добавочный коэффициент (air_mass_rate_adder), который может быть добавлен к требуемой скорости воздушного потока, чтобы приводить суммарную погрешность массы воздуха, по существу, к нулю.
Коррекция массового расхода воздуха (air_mass_rate_adder) затем добавляется контроллером 214 к требуемому массовому расходу воздуха, чтобы предоставлять отрегулированный или скорректированный массовый расход воздуха (air_mass_rate_corrected). По существу, требуемый массовый расход воздуха имеет соответствующее заданное положение дроссельной заслонки. Здесь скорректированный массовый расход воздуха затем преобразуется в измененное заданное положение дроссельной заслонки (throttle_position). При определенных обстоятельствах скорректированный массовый расход воздуха (air_mass_rate_corrected) может быть недостижим и, таким образом, окажется обрезанным (так называемым насыщенным), но эта конфигурация все еще будет достигать цели нулевой чистой суммарной погрешности.
Таким образом, изменяя заданное положение дроссельной заслонки с помощью коррекции на основании заданного массового расхода воздуха (или воздушного потока) через дроссельную заслонку и фактического массового расхода воздуха (или воздушного потока) через дроссельную заслонку, суммарная погрешность массы воздуха или скорости воздушного потока может быть, по существу, приведена к нулю, в то же время все еще отслеживая требуемый угол дроссельной заслонки.
На фиг.3 показан способ 300 для регулирования сигнала, указывающего заданное положение дроссельной заслонки, с помощью коррекции на основании суммарной погрешности скорости воздушного потока и затем приведения дроссельной заслонки в отрегулированное положение дроссельной заслонки. Это позволяет приводить суммарную погрешность к нулю.
На этапе 302 условия работы двигателя могут быть оценены и/или измерены. Они могут включать в себя, например, скорость вращения двигателя, требуемый водителем крутящий момент, положение педали тормоза, положение педали акселератора, уровень наддува, давление воздуха в коллекторе (MAP), воздушный поток в коллекторе (MAF), температура каталитического нейтрализатора выхлопа, окружающие условия (такие как температура окружающей среды, влажность и атмосферное давление), и т.д. Будет понятно, как разъяснено ниже, что оценка давления воздуха в коллекторе корректируется во время переходного состояния педали тормоза и/или переходного состояния педали акселератора на основании скорости потока воздуха, протекающего во впускной коллектор двигателя.
На этапе 304 скорость воздушного потока через дроссельную заслонку (или массовый расход воздуха через дроссельную заслонку), которая должна быть задана, может быть определена на основании расчетных рабочих условий двигателя. Кроме того, положение дроссельной заслонки, которое должно быть задано, может быть определено, где заданное положение дроссельной заслонки основано на заданной скорости воздушного потока через дроссельную заслонку.
На этапе 305 может быть найден поправочный коэффициент. По существу, поправочный коэффициент может быть коррекцией, используемой, чтобы уменьшать суммарную погрешность скорости воздушного потока, по существу, до нуля. Суммарная погрешность скорости воздушного потока включает в себя погрешность скорости воздушного потока, которая суммируется в течение множества циклов двигателя или в течение работы двигателя. В одном примере коррекция является добавочным коэффициентом, который добавляется к заданной скорости воздушного потока через дроссельную заслонку. Причем во время работы двигателя, в среднем, фактическое положение дроссельной заслонки может быть сделано соответствующим заданному положению дроссельной заслонки. В одном примере поправочный коэффициент может быть сохранен в справочной таблице в памяти контроллера. Дополнительно, как разъяснено ниже на этапах 312-138, поправочный коэффициент может непрерывно обновляться (например, в каждом цикле двигателя) с помощью данных обратной связи из самого последнего регулирования дроссельной заслонки.
На этапе 306 заданная скорость воздушного потока через дроссельную заслонку может быть отрегулирована с помощью коррекции. Например, когда коррекция является добавочным коэффициентом, коррекция может быть добавлена к заданной скорости воздушного потока через дроссельную заслонку. Применяя коррекцию, суммарная погрешность скорости воздушного потока может уменьшаться до нуля. Кроме того, суммарная погрешность скорости воздушного потока может быть уменьшена посредством уменьшения суммарной погрешности угла дроссельной заслонки до нуля. На этапе 308, на основании отрегулированной скорости воздушного потока, заданное положение дроссельной заслонки может быть изменено. Например, отрегулированная скорость воздушного потока может быть преобразована в соответствующее измененное положение дроссельной заслонки. Затем, на этапе 310, программа включает в себя приведение дроссельной заслонки в измененное положение дроссельной заслонки.
В альтернативных вариантах осуществления заданная скорость воздушного потока может быть преобразована в соответствующее заданное положение дроссельной заслонки (например, заданный угол дроссельной заслонки), и поправочный коэффициент может быть применен непосредственно к заданному положению дроссельной заслонки, чтобы предоставлять измененное положение дроссельной заслонки. Когда используется в данном документе, изменение заданного положения дроссельной заслонки включает в себя непрерывное изменение заданного положения дроссельной заслонки во время работы двигателя (например, в каждом цикле двигателя). Таким образом, изменяя заданное положение дроссельной заслонки с помощью коррекции на основании задаваемой скорости воздушного потока через дроссельную заслонку и фактической средней скорости воздушного потока через дроссельную заслонку, по существу, может быть обеспечена нулевая суммарная погрешность скорости воздушного потока, при одновременном отслеживании требуемого угла дроссельной заслонки.
Авторы настоящего изобретения увидели, что в то время как отклонения между фактическим положением дроссельной заслонки и заданным положением дроссельной заслонки могут быть использованы для регулирования мгновенной скорости воздушного потока, по времени, погрешности угла дроссельной заслонки могут складываться и вести к постепенному увеличению суммарной погрешности угла дроссельной заслонки (или суммарной погрешности скорости воздушного потока). График 400 на фиг.4 показывает такое увеличение. В частности, график 400 показывает изменение в погрешности угла дроссельной заслонки (в град./сек. по y-оси) по времени (в секундах по x-оси). Кривая суммарной погрешности угла дроссельной заслонки по времени в отсутствие примененной коррекции (график 402, пунктирная линия) показывает постепенное увеличение суммарной погрешности. Таким образом, контроллер двигателя сконфигурирован, чтобы приводить суммарную погрешность к нулю с течением времени. Это означает, что если угол дроссельной заслонки слишком большой в течение периода времени, когда отрицательный угол дроссельной заслонки задается, он будет компенсирован позже периодом, когда угол дроссельной заслонки меньше, чем заданный временно. По существу, это увеличение может вести к возмущениям воздуха в двигателе, которые ухудшают выхлопные выбросы и характеристики двигателя. Для сравнения, кривая изменения в погрешности угла дроссельной заслонки по времени при наличии примененной коррекции (график 404, сплошная линия) показывает суммарную погрешность, которая в среднем равна нулю в динамике по времени. Авторы настоящего изобретения определили, что для большинства применений регулирования подачи воздуха к двигателю суммарная скорость воздушного потока может быть более важна, чем мгновенная скорость воздушного потока. Таким образом, обрабатывая команду дроссельной заслонке с помощью коррекции, чтобы обеспечивать, по существу, нулевую погрешность угла дроссельной заслонки, разница между заданным и фактическим воздушным потоком в дроссельной заслонке уменьшается до нуля. По существу, это уменьшает возмущения воздуха в двигателе, улучшая выбросы в выхлопе и характеристики двигателя.
Допуская, по существу, нулевую суммарную погрешность, достигаются различные преимущества при управлении множеством систем, которые чувствительны к суммарным погрешностям скорости воздушного потока. В качестве первого примера, адаптивное регулирование подачи топлива может быть чувствительно к суммарным погрешностям скорости потока. В частности, "кратковременный баланс накачки топлива" и "длительный баланс накачки топлива", оба зависят от суммарных погрешностей скорости воздушного потока. Ошибка, обусловленная переходными процессами, выбивает кратковременную балансировку перекачки топлива из ее оптимального периода/шаблона "пилообразного отключения" для минимальных выбросов. Систематическая ошибка, вызванная, например, ограничением угла дроссельной заслонки, где отрицательные углы дроссельной заслонки недостижимы, привносит ошибку в длительную балансировку перекачки топлива непреднамеренно и некорректно. Эта ошибка привносит погрешность подачи топлива в терминах упреждения подачи топлива. Таким образом, обеспечивая, по существу, нулевую суммарную погрешность, улучшается адаптивное регулирование подачи топлива.
В качестве другого примера, управление каталитическим нейтрализатором может быть чувствительно к суммарным погрешностям массового расхода воздуха. В частности, управление каталитическим нейтрализатором отслеживает восстановители и окислители, сохраненные в каталитическом нейтрализаторе, и балансирует их, так что он может реагировать на избыток восстановителей или избыток окислителей в подаваемом газе. Неучтенные погрешности скорости воздушного потока отбрасывают это вычисление и снижают готовность каталитического нейтрализатора. Нулевая чистая суммарная погрешность скорости воздушного потока не допускает эту цепочку ухудшающих эффектов. Таким образом, обеспечивая, по существу, нулевую суммарную погрешность, управление каталитическим нейтрализатором улучшается.
Формирование разрежения во впускном коллекторе также чувствительно к суммарным погрешностям скорости воздушного потока. Применяя нулевую чистую суммарную погрешность скорости воздушного потока, кратковременно дроссельная заслонка остается закрытой дольше, чем это было бы в ином случае, таким образом, помогая в создании разрежения во впускном коллекторе.
Возвращаясь к фиг.3, на этапе 312 данные обратной связи могут быть использованы, чтобы регулировать по обратной связи положение дроссельной заслонки в измененное положение дроссельной заслонки, заданное контроллером. Это отрегулированное по обратной связи положение дроссельной заслонки отражает любое позиционное ограничение контроллера положения дроссельной заслонки. На этапе 314 фактическая скорость воздушного потока через дроссельную заслонку может быть определена. В одном примере фактическая средняя скорость воздушного потока через дроссельную заслонку может быть основана на оценке давления воздуха во впускном коллекторе. Помимо фактического положения дроссельной заслонки, фактическая скорость воздушного потока может быть основана на MAF или MAP.
На этапе 316 погрешность скорости воздушного потока через дроссельную заслонку может быть определена на основании фактической скорости воздушного потока через дроссельную заслонку и заданной (измененной) скорости воздушного потока через дроссельную заслонку. Затем, на этапе 318, погрешность скорости воздушного потока через дроссельную заслонку может суммироваться в течение множества циклов двигателя или во время работы двигателя, чтобы определять суммарную погрешность скорости воздушного потока через дроссельную заслонку. На основании суммарной погрешности скорости воздушного потока в текущем цикле поправочный коэффициент может быть исправлен, так что обновленный поправочный коэффициент создается и сохраняется в памяти контроллера. Затем, во время последующего цикла, обновленный поправочный коэффициент может быть найден в справочной таблице, и заданная скорость воздушного потока через дроссельную заслонку (или заданное положение дроссельной заслонки) может быть изменена с помощью исправленного поправочного коэффициента.
Будет понятно, что алгоритм на фиг.3 может также выполняться во время переходных состояний педали. В частности, оценка давления воздуха в коллекторе может быть откорректирована во время переходного состояния педали тормоза и/или переходного состояния педали акселератора на основании скорости потока воздуха, протекающего во впускной коллектор двигателя (например, из тормозного усилителя). Затем сигнал, указывающий заданное положение дроссельной заслонки, может быть отрегулирован, чтобы приводить суммарную погрешность скорости воздушного потока через дроссельную заслонку к нулю. Таким образом, во время переходного состояния педали, когда заданное положение дроссельной заслонки находится за пределами ограничения положения дроссельной заслонки, контроллер может сохранять положение дроссельной заслонки на ограничении в течение интервала времени, пока суммарная погрешность скорости воздушного потока не уменьшится до нуля, и затем, после того как суммарная погрешность скорости воздушного потока была уменьшена, контроллер может приводить дроссельную заслонку в отрегулированное положение дроссельной заслонки.
В качестве примера, во время переходного состояния педали (например, для педали тормоза и/или педали акселератора), когда положение дроссельной заслонки задается как уменьшающееся за пределами ограничения положения дроссельной заслонки (например, когда задается отрицательный угол дроссельной заслонки), контроллер может уменьшать положение дроссельной заслонки до предельного положения дроссельной заслонки (например, удерживать дроссельную заслонку полностью закрытой). По существу, дроссельная заслонка может иметь физические ограничения перемещения, а также ограничения по отклику. В данном документе контроллер может удерживать дроссельную заслонку в предельном положении дроссельной заслонки, пока заданное положение дроссельной заслонки остается за пределами ограничения. Затем, во время последующего заданного увеличения в положении дроссельной заслонки, контроллер может специально увеличивать положение дроссельной заслонки с более медленной скоростью, чем было задано. Таким образом, заданное положение дроссельной заслонки может быть отрегулировано с помощью коррекции, чтобы уменьшать суммарную погрешность угла дроссельной заслонки и уменьшать возмущения воздуха в двигателе. Пример регулирования дроссельной заслонки во время переходного состояния педали показан на фиг.5.
Таким образом, постоянно изменяя заданное положение дроссельной заслонки с помощью поправочного коэффициента, что приводит суммарную погрешность угла дроссельной заслонки, по существу, к нулю, возмущения воздуха в двигателе могут быть уменьшены и выбросы могут быть улучшены.
На фиг.5 график 500 показывает пример регулирования заданного положения дроссельной заслонки, чтобы уменьшать суммарную погрешность угла дроссельной заслонки во время работы двигателя и во время переходного состояния педали тормоза. В частности, требуемый выходной крутящий момент двигателя (Tq) показан на графике 502, изменения давления в коллекторе (MAP) относительно атмосферного давления (пунктирная линия 505) показаны на графике 504, показатель, относящийся к положению педали тормоза, показан на графике 506, показатель, относящийся к заданному положению дроссельной заслонки (TP), показан на графике 508 (и сегменте 509), и изменение в суммарной погрешности угла дроссельной заслонки показано на графиках 514 (при наличии примененной коррекции, сплошная линия) и 515 (при отсутствии примененной коррекции, пунктирная линия). Все графики начерчены по времени (по x-оси).
Перед моментом t1 времени двигатель работает в условиях низкого требуемого крутящего момента двигателя, например, в режиме холостого хода. Дополнительно, давление во впускном коллекторе находится в состоянии разрежения, тормоз транспортного средства не задействован (т.е. разрежение тормозного усилителя находится на более высоком уровне), и дроссельная заслонка на впуске двигателя большей частью закрыта. Дополнительно, момент зажигания может быть сдвинут на более ранний срок (не показано).
Во время t1 требуемый крутящий момент двигателя (график 502) начинает увеличиваться и остается на более высоком уровне непосредственно до времени t2, когда он уменьшается. Давление во впускном коллекторе (график 504) начинается с состояния разрежения (т.е. ниже линии 505 атмосферного давления) и переходит в состояние положительного давления. Тормоз транспортного средства не применяется между моментами t1 и t2 времени. Поскольку тормоз не задействован в течение этого времени, воздушный поток из впускного коллектора в тормозной усилитель может быть ограничен (например, посредством запорного клапана, такого как клапан 144 на фиг.1). Положение дроссельной заслонки двигателя следует траектории, которая аналогична требуемому крутящему моменту двигателя от момента t1 до момента t2 времени. От момента t1 до момента t2 времени положение дроссельной заслонки двигателя и требуемый крутящий момент двигателя следуют траектории, представляющей ускорение транспортного средства. Кроме того, зажигание в двигателе может быть задержано (не показано), чтобы отражать работу двигателя при более высокой нагрузке. По существу, между моментами t1 и t2 времени заданное положение дроссельной заслонки может непрерывно изменяться с помощью поправочного коэффициента перед приведением дроссельной заслонки в измененное положение дроссельной заслонки с тем, чтобы сохранять суммарную погрешность скорости воздушного потока (или погрешность угла дроссельной заслонки), по существу, нулевой (как указано графиком 514).
В момент t2 времени требуемый крутящий момент двигателя находится на низком уровне, указывающем, что транспортное средство работает на холостых оборотах, тормозит или движется накатом. Давление во впускном коллекторе падает с падением требуемого крутящего момента двигателя непосредственно перед временем t2, и давление во впускном коллекторе находится в состоянии разрежения непосредственно перед моментом t2 времени. Затем, в момент t2 времени, тормоз транспортного средства применяется, как указано посредством изменения в положении педали тормоза. Между моментами t2 и t3 времени положение педали тормоза остается, по существу, постоянным после первоначального применения тормоза вплоть до отпускания тормоза в момент t3 времени. Когда тормоз транспортного средства применяется, давление тормозного усилителя увеличивается, поскольку диафрагма в тормозном усилителе сжимает вакуумную камеру тормозного усилителя. Следовательно, запорный клапан открывается, чтобы уравнивать давление между вакуумной камерой тормозного усилителя и впускным коллектором. Во время этих состояний воздух протекает из тормозного усилителя во впускной коллектор через запорный клапан. При отсутствии регулирования дроссельной заслонки, чтобы компенсировать внезапный воздушный поток из тормозного усилителя во впускной коллектор, может ожидаться всплеск (или скачок) в MAP. Таким образом, чтобы уменьшать погрешности MAP, пока тормоз применяется (т.е. во время переходного состояния педали тормоза), требуемая скорость воздушного потока через дроссельную заслонку и соответствующее требуемое положение дроссельной заслонки могут быть определены.
В изображенном примере регулирования дроссельной заслонки, фактически требуемое, чтобы полностью компенсировать воздушный поток тормозного усилителя, является отрицательным положением дроссельной заслонки (как показано посредством заштрихованного сегмента 509). Однако такое положение находится за пределами ограничения 507 положения дроссельной заслонки. В одном примере ограничение 507 положения дроссельной заслонки является физическим ограничением дроссельной заслонки, причем, когда дроссельная заслонка находится на ограничении 507, дроссельная заслонка удерживается полностью закрытой. Таким образом, пока отрицательное положение дроссельной заслонки требуется (показано пунктирной линией 509) во время переходного состояния педали тормоза, дроссельная заслонка может фактически быть позиционирована на ограничении 507, как показано посредством графика 508 (сплошная линия). Дополнительно, зажигание может быть отрегулировано до субоптимальной настройки в это время, так что крутящий момент двигателя, по существу, сохраняется, даже если переходная скорость воздушного потока выше, чем требуемая, во время этого события. Однако, поскольку положение дроссельной заслонки находится на ограничении, тогда как требовалось, чтобы она была в отрицательном положении, суммарная погрешность скорости потока может нарастать, что изображено на данном чертеже посредством огороженной области 510, а также увеличившейся суммарной погрешностью на графике 514. Следует отметить, что требуемый крутящий момент двигателя не следует изменению в положении дроссельной заслонки, а скорее остается постоянным, поскольку входное воздействие от водителя отсутствует. Закрытие дроссельной заслонки временно компенсирует эффект недросселированного воздуха, протекающего из тормозного усилителя во впускной коллектор, но влияет на суммарную погрешность скорости воздушного потока.
В момент t3 времени тормоз транспортного средства отпускается, в то время как требуемый крутящий момент двигателя остается, по существу, постоянным и на более низком уровне. Дополнительно, педаль акселератора может быть применена (не показано), в то время как педаль тормоза отпускается. Когда тормоз транспортного средства отпускается, клапан в тормозном усилителе закрывается, позволяя воздуху, который действовал на диафрагму тормозного усилителя во время применения тормоза, выпускаться в вакуумную камеру тормозного усилителя.
В ответ на применение педали акселератора в момент t3 времени требуемый водителем крутящий момент может увеличиваться, и требуется более высокое MAP. Чтобы обеспечивать это, может быть задано более открытое положение дроссельной заслонки (как показано в заштрихованном сегменте 509), чтобы обеспечивать требуемый воздушный поток. По существу, если положение дроссельной заслонки было отрегулировано согласно запросу, суммарная погрешность, увеличившаяся ранее (изображено посредством огороженной области 510), может сохраняться. В частности, регулирования положения дроссельной заслонки, заданные в момент времени t2 ранее, могут позволять MAP сохраняться, но в отсутствие коррекции могут вести к постепенному увеличению суммарной погрешности, как показано на графике 515 (прерывистая линия).
Таким образом, чтобы приводить суммарную погрешность к нулю, заданное положение дроссельной заслонки должно быть отрегулировано с помощью коррекции. В частности, даже если команда отрицательного положения дроссельной заслонки удаляется и положительное положение дроссельной заслонки задается в момент t3 времени, положение дроссельной заслонки может специально сохраняться в закрытом положении дроссельной заслонки (например, на ограничении 507 положения дроссельной заслонки), как показано посредством графика 508 (сплошная линия). Дополнительно, дроссельная заслонка специально удерживается закрытой до тех пор, пока суммарная ошибка не уменьшится. В частности, для интервала времени после момента t3, поскольку положение дроссельной заслонки удерживается на ограничении, в то время как требовалось, чтобы оно было в положительном положении, суммарная погрешность скорости потока может накапливаться, изображено здесь посредством огороженной области 512. Однако, положительная погрешность, изображенная посредством огороженной области 512, может компенсировать (или противодействовать, в среднем) отрицательную погрешность, изображенную посредством огороженной области 510, так что после момента t3 времени накопленная суммарная погрешность снижается, как показано на графике 514.
Положение дроссельной заслонки удерживается закрытым до тех пор, пока суммарная погрешность, увеличившаяся в огороженной области 512, не приведет суммарную погрешность, увеличившуюся в огороженной области 510, по существу, к нулю. Затем, как показано сплошной линией 509, положение дроссельной заслонки может быть сдвинуто в более открытое положение, чтобы совпадать с заданным положительным положением дроссельной заслонки.
Таким образом, во время переходного состояния педали, когда положение дроссельной заслонки задается как уменьшающееся за пределы ограничения положения дроссельной заслонки, контроллер уменьшает положение дроссельной заслонки до предельного положения дроссельной заслонки, и во время последующего заданного увеличения в положении дроссельной заслонки контроллер специально увеличивает положение дроссельной заслонки с более медленной скоростью, чем инструктировано. Преобразуя сигнал дроссельной заслонки так, чтобы суммарная погрешность была, по существу, равна нулю, источники недросселированного воздуха, такие как воздух тормозного усилителя, могут быть эффективно компенсированы во время управления подачей воздуха к двигателю. В частности, отклонения MAP, такие как ожидаемые во время откачки тормозного усилителя, могут быть уменьшены.
В качестве альтернативного примера, в ответ на первое переходное состояние педали тормоза (здесь применяется педаль тормоза), когда заданное положение дроссельной заслонки находится за пределами нижнего ограничения (здесь нижним физическим ограничением дроссельной заслонки), контроллер может уменьшать положение дроссельной заслонки до нижнего ограничения. Затем в ответ на второе переходное состояние педали тормоза (здесь педаль тормоза отпускается), когда заданное положение дроссельной заслонки увеличивается, контроллер может медленно увеличивать положение дроссельной заслонки от нижнего ограничения до тех пор, пока погрешность угла дроссельной заслонки не уменьшится, по существу, до нуля, и затем быстро увеличивает положение дроссельной заслонки до заданного положения дроссельной заслонки.
Таким образом, регулируя заданную скорость воздушного потока через дроссельную заслонку с помощью коррекции, может быть достигнута, по существу, нулевая суммарная погрешность по углу дроссельной заслонки (или требуемому массовому расходу воздуха) без отрицательного воздействия на динамическую характеристику позиционирования дроссельной заслонки. Уменьшая суммарную погрешность, могут быть эффективно компенсированы отклонения MAP, возникающие вследствие источников недросселированного воздуха. Кроме того, износ дроссельной заслонки может быть уменьшен. В общем, характеристики двигателя улучшаются.
Отметим, что пример управления и алгоритмов оценки, включенных в данный документ, может быть использован с различными конфигурациями двигателя и/или системы транспортного средства. Конкретные алгоритмы, описанные в данном документе, могут представлять одну или более из любого числа стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.п. По существу, различные иллюстрированные действия, операции или функции могут быть выполнены последовательно, параллельно или в некоторых случаях опущены. Аналогично, порядок обработки необязателен для того, чтобы добиваться признаков и преимуществ примерных вариантов осуществления, описанных в данном документе, и предусмотрен только для простоты иллюстрации и описания. Одно или более из иллюстрированных действий или функций может неоднократно выполняться в зависимости от конкретной используемой стратегии. Дополнительно, описанные действия могут графически представлять код, который должен быть запрограммирован на машиночитаемом носителе хранения в системе управления двигателем.
Следует понимать, что конфигурации и способы, описанные в данном документе, являются примерными по сути, и что эти конкретные варианты осуществления не должны рассматриваться в ограничивающем смысле, поскольку возможны многочисленные варианты. Например, вышеописанная технология может быть применена к двигателям типа V6 (V-образный 6-цилиндровый), I-4 (рядный 4-цилиндровый), I-6 (рядный 6-цилиндровый), V-12 (V-образный 12-цилиндровый), оппозитный 4-цилиндровый и другим типам. Предмет изучения настоящего открытия включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и конфигураций, и другие признаки, функции и/или свойства, описанные в данном документе.
Последующая формула изобретения в отдельности отмечает некоторые комбинации и подкомбинации, рассматриваемые как новые и неочевидные. Эта формула может ссылаться на "элемент" или "первый" элемент или их эквивалент. Такая формула изобретения должна пониматься как включающая в себя объединение одного или более таких элементов, не требующее и не исключающее два или более таких элементов. Другие комбинации и подкомбинации раскрытых признаков, функций, элементов и/или свойств могут быть заявлены посредством изменения настоящей формулы изобретения или посредством представления новых пунктов формулы изобретения в этой или родственной заявке. Такая формула изобретения, либо более широкая, либо более узкая, эквивалентная или отличная по объему по сравнению с первоначальной формулой изобретения, также рассматриваются как включенная в настоящее изобретение.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)

