Результат интеллектуальной деятельности: Гидроакустическая дальномерная система навигации
Вид РИД
Изобретение
Изобретение относится к гидроакустическим навигационным системам, конкретно к системам, использующим импульсные методы определения дистанций между объектами навигации и приемоответчиками акустических сигналов.
Глобальные радиочастотные системы позиционирования (ГЛОНАСС/GPS/Galileo/IRNSS/Compass/QZSS) могут решать задачи позиционирования, навигации и синхронизации времени (PNT) технических систем, как для военных, так и для гражданских целей и приложений. Однако сигналы с радиочастотами, используемыми данными системами, не могут проникать в морскую воду, и использоваться для позиционирования подводных устройств (ПУ).
Подводные устройства и аппараты используют инерционные измерительные устройства (IMU) для навигации в подводном положении. Но датчики счисления могут быть единственным средством подводной навигации только для коротких по продолжительности миссий, так как накопленная ошибка инерциальной системы счисления в конечном итоге требует внешних коррекционных измерений для поддержания или восстановления точной работы.
Известно, что распространение импульсных акустических сигналов в подводных каналах сопряжено с рядом проблем. К ним относятся - изменяющиеся во времени многолучевое распространение сигналов и задержки импульсных сигналов при распространении по лучам, ограничение частотной полосы пропускной способности каналов, наличие экологических и техногенных шумов и т.п. Наиболее сильно указанные эффекты проявляются в условиях мелководных каналов распространения - на шельфе, в заливах, проливах и внутренних морях и водоемах, а также в акваториях мелководных морей, покрытых льдом.
В 1996 году компанией Kongsberg Maritime AS (https://www.km.kongsberg.com/) была разработана навигационная система HiPAP® (High Precision Acoustic Positioning). Указанная система имеет модификации для большого количество приложений, в том числе позиционирования буровых судов, позиционирования погрузки в море, позиционирование укладки кабелей и трубопроводов и т.п. HiPAP® системы способны обеспечивать навигацию и позиционирование подводных устройств на дистанциях до 4000 метров с использованием мощных глубоководных приемопередатчиков. Для повышения точности и надежности позиционирования используют увеличение мощности излучения передатчиков с целью увеличения соотношения сигнал/шум (S/N), вывод приемопередатчиков в зоны без препятствий или пузырьков воздуха между ними и учет изгиба или отклонения луча из-за различной температуры в толще воды, используют также приемопередатчики с формируемой диаграммой направленности. Системы HiPAP имеют встроенные алгоритмы для расчета отклонения звукового луча при распространении его в водной среде, а также алгоритмы для компенсации ошибок, вызванные этим эффектом. Для подавления шума и получения максимальной чувствительности в направлении приемоответчика, установленного на ПУ, Kongsberg Maritime AS использует специально разработанные приемопередатчики с формированием узкой диаграммы направленности лучей.
Недостатками указанной системы позиционирования является размещение аппаратуры для измерений дальности и выполнение позиционирования ПУ на судне сопровождения, а также ручное управлением оператором работой навигационной системы. Использование приемоответчиков большой мощности для получения превышения полезного сигнала над шумом вблизи судна сопровождения требует наличия мощных источников электропитания на ПУ или ПУ должен получать электроэнергию по кабелю. Указанные требования ограничивают круг решаемых задач в основном операциями с буксируемыми устройствами в небольшой пространственной области позиционирования ПУ (максимум 4000 метров) относительно судна сопровождения.
Известна «Гидроакустическая навигационная система» (п. РФ №2477497 С2), включающая навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенную на объекте навигации аппаратуру измерения временных интервалов распространения сигналов с их последующим преобразованием в дистанции между объектом навигации и гидроакустическими приемопередатчиками навигационной базы, а также навигационный вычислитель для определения координат объекта навигации с соответствующим программно-математическим обеспечением. Часть М-приемоответчиков закреплена на морском дне, остальные установлены на водной поверхности и оснащены приемниками сигналов спутниковых радионавигационных систем. Антенна приемопередатчика объекта навигации выполнена с электронно-управляемой формой характеристики направленности.
Использование в указанной системе в качестве носителей гидроакустических приемоответчиков буев на поверхности, ограничивает возможность эксплуатации навигационной системы, в частности в штормовых условиях, в акваториях с ледовым покровом и в районах с развитым судоходством (рыболовством). Кроме этого, предлагаемая система будет эффективно измерять дистанции по времени прихода импульса и выделенному углу на приемоответчик только для сигналов, распространяющихся по «прямому» лучу. Также, для волноводов мелкого моря на приемник будут приходить несколько импульсов, выходящих под разными углами и испытывающих разное количество отражений от границ (Rodriguez О., Jesus S. Physical limitations of travel time based shallow water tomography. J. Acoust. Soc. Am. 108 (6), December 2000, p. 2817). Ошибка измерений дистанции в этом случае будет пропорциональна интервалу времен прихода всех импульсов от конкретного маяка.
Известна «Гидроакустическая навигационная система» (п. РФ №2371738 С1). Система содержит навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенный на объекте навигации гидроакустический приемопередатчик, посредством которого измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками, по крайней мере один из которых установлен на водной поверхности. Приемная гидроакустическая антенна состоит из четырех гидрофонов, каждая секция антенны состоит из двух одноканальных и одного многоканального модуля, установленных на линейном несущем кронштейне, выполненном перфорированным, антенны приемников выполнены в форме сферической поверхности и размещены на стальной пластине.
Недостатки данного технического решения связаны с использованием поверхностных буев дрифтеров в качестве ретрансляторов и опорных маяков приемоответчиков. Система навигации будет иметь ограниченное применения в мелководных акваториях, в прибрежной и шельфовой зонах в виду сильного влияния волновых и ветровых нагрузок, неуправляемого дрейфа, в акваториях покрытых льдом или в районах с дрейфующими льдами, в районах развитого судоходства и рыболовства, ввиду повышенного риска разрушения. Наличие большого количества приемоответчиков для навигационных сигналов, сигналы информационного обмена между поверхностными дрифтерами, донными маяками и подводными устройствами, имея индивидуальные рабочие частоты, будут занимать широкий частотный диапазон и приводить к выходу ряда частот за пределы оптимальных частот распространения звука в конкретных акваториях, что приведет к ухудшению рабочих характеристик по дальности и надежности позиционирования. Использование в одной системе навигации двух систем позиционирования (с короткой базой и длинной базой), системы акустического информационного обмена и системы радиочастотного позиционирования увеличивает потребляемую мощность, увеличивает количество технических и электронных компонентов, что повышает вероятность технических сбоев. Отметим также, что решение задач навигации и информационного обмена в реальном времени потребуют вычислительные ресурсы, способные работать с большими объемами информации с высокой производительностью, что может наложить ограничения на использование системы по массогабаритным размерам и энергообеспечению для ПУ и приемоответчиков.
Известен ряд гидроакустических навигационных систем, состоящих из нескольких гидроакустических приемоответчиков (маяков), размещаемых на поверхности и (или) дне водных акваторий и устройств, располагающихся на объекте навигации: устройств опроса маяков, вычисления дистанции по измеренному времени распространения сигнала и значению скорости звука в водной среде и вычисления координат объекта по найденным значениям дистанций (патенты РФ №№713278 U1, 2032187 С1). Указанные системы разработаны с целью повышения дальности и точности определения координат для условий рефракции и многолучевого распространения навигационных сигналов.
В известном решении (патент РФ №713278 U1) навигационная система содержит донную навигационную базу из М гидроакустических приемоответчиков с различными рабочими частотами ответа и размещенные на объекте навигации гидроакустический передатчик, вход которого соединен с выходом генератора синхроимпульсов, М-канальный приемник, выходы которого подключены ко входам М измерителей времен распространения гидроакустических сигналов до приемоответчика, работающего на частоте этого канала и обратно, вторые входы которых соединены с выходами генератора синхроимпульсов, и вычислитель координат объекта навигации. С целью повышения точности определения координат в условиях рефракции и многолучевости, в каждый из М каналов введены по числу видов возможных траекторий N - блоков преобразователей временных интервалов в дистанции.
Недостатком такой навигационной системы является погрешность определения координат, обусловленная тем, что время прихода сигнала определяется по переднему фронту сигнала, аналоговым образом, с использованием порогового дискриминатора. Сигналы, с уровнем ниже порогового не измеряются. Для сигналов с уровнями выше пороговых, точность измерения времени прихода импульса зависит от крутизны переднего фронта. Также, ввиду использования простых тональных импульсов имеется вероятность появления помех в каналах приема, которые будут приняты как полезный сигнал. В этом случае измеритель времени распространения, который срабатывает от первого из принятых сигналов, зафиксирует время прихода, отличающееся от реального, что приведет к сдвигу текущего номера максимума и неконтролируемой погрешности определения координат объекта.
В наиболее близком к заявляемому решении предложена гидроакустическая синхронная дальномерная навигационная система, позволяющая уменьшить погрешность определения координат объекта навигации (п. РФ №2032187 С1). Система содержит донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, M×N блоков преобразования временных интервалов в дистанции по N в каждом из М каналов, М блоков выбора максимального значения дистанций из N значений и вычислитель координат объекта навигации. В каждый из М каналов введены N-1 дополнительных измерителей времени распространения, N-1 мультивибраторов задержки, N-1 мультивибраторов строб-импульса, N-1 селекторов. В каждый из М каналов введены по числу видов N лучевых траекторий N(N-1) дополнительных блоков преобразования временных интервалов в дистанции, N-1 блоков выбора максимального значения дистанции и усреднитель дистанций. Выходы всех блоков выбора максимального значения соединены с N входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислительного устройства координат объекта навигации.
Основным недостатком данного решения является то, что в каждом цикле определения дистанций до каждого из М маяков, измеряются времена приходов импульсов с 1 по N, время каждого прихода пересчитывается в дистанцию, а все дистанции усредняются. При этом не учитывается, что количество импульсных приходов в каждом цикле может отличаться от N, импульсные приходы могут появляться или исчезать от цикла к циклу, что не позволяет однозначно идентифицировать траектории, по которым распространялись конкретные импульсы и корректно рассчитывать дистанции до маяков (Половинка Ю.А. Коррекция ошибок и селективное сопровождение импульсов в потоковых данных акустического зондирования. Подводные исследования и робототехника, №2/20, Владивосток. Издательство «Дальнаука» ИПМТ, 2015, с. 40-46). Использование усреднения по всем измерениям не приведет к уменьшению ошибки, так как из-за ошибок идентификации траекторий происходит увеличение ошибки всех измерений. Регистрация любых импульсных сигналов шума в полосе рабочих частот и в течение цикла измерений, будет также приводить к ошибочным значениям времен прихода (и пересчитанных значений дистанций) на временах после импульса шума и до конца времени измерения. Отметим также, что в результате межлучевой интерференции, амплитудно-временные параметры импульсов имеют сложный характер, затягиваются, у сигналов изменяются параметры переднего фронта, что также приводит к снижению точности работы таких элементов схемы как системы измерений времени распространения, выбора максимального значения и мультивибраторы строб-импульсов и задержек.
Задача - разработка гидроакустической дальномерной системы навигации для условий многолучевого распространения навигационных сигналов в условиях мелкого моря, на шельфе, в заливах, проливах, акваториях, покрытых льдом.
Технический результат - повышение точности и надежности измерения дистанций и подводного позиционирования объектов навигации в условиях многолучевого распространения навигационных сигналов в мелководных акваториях.
Поставленная задача решается гидроакустической дальномерной системой навигации, включающей навигационную базу, как минимум, из трех акустических маяков приемоответчиков Mn при n≥3, например, M1, М2 и М3, размещенных стационарно на акватории в точках с известными координатами, принимающих Kо и излучающих кодоимпульсные сигналы расширенного спектра K1, K2 и K3, соответственно, с частотой заполнения fм и размещенные на объекте навигации блок формирования и излучения сигналов, включающий генератор-формирователь электрического кодоимпульсного сигнала Kо опроса навигационных маяков, передатчик кодового акустического импульсного сигнала опроса навигационных маяков и таймер с генератором синхроимпульсов для запуска генератора-формирователя и передатчика кодового сигнала опроса, блок приема и первичной обработки сигналов из одиночного многоканального приемника, усилителя кодоимпульсных электрических сигналов, полосового фильтра с центральной частотой fм, для фильтрации кодоимпульсных электрических сигналов и аналого-цифрового преобразователя кодоимпульсных электрических сигналов, а вычислительное устройство, включающее блок памяти, блок электронного коммутатора, блоки корреляторов сигналов SKn от маяков Mn, блоки поиска максимумов и определение времени распространения импульсов для сигнала от маяков, блоки определения дистанций для сигналов от маяков и блок вычисления координат объекта навигации.
Использование кодоимпульсных сигналов расширенного спектра с тональной частотой заполнения, позволяет использовать "окна прозрачности" акустических каналов - ограниченный диапазон частот с небольшим затуханием и использовать один многоканальный приемник для сигналов со всех маяков на подводном объекте, что приводит к повышению точности и надежности измерения дистанций и подводного позиционирования в условиях многолучевого распространения навигационных сигналов в мелководных акваториях по сравнению с прототипом. Кроме этого, использование навигационных сигналов в виде кодоимпульсных сигналов расширенного спектра позволяет получить дополнительное преимущество ввиду дополнительного увеличения соотношения сигнал/шум за счет согласованной (корреляционной) обработки сигналов на маяках и подводном объекте при приеме. Цифровое преобразование и цифровая обработка сигналов для выделения импульсов, позволяет избежать использования большого количества аналоговых многозвенных амплитудно-временных компараторов в каждом из М каналов в прототипе, выполняя указанную процедуру в предлагаемой системе в виде стандартной процедуры точного поиска максимумов для временной функции коэффициентов взаимной корреляции цифровых масок и сигнала с приемника, при этом ввиду использования цифрового кодирования, этот процесс выполняется с использованием вычислительного устройства параллельно (синхронно) для сигналов со всех приемоответчиков и, при необходимой производительности вычислительного устройства (ВУ), в реальном времени. Определение времени распространения акустических импульсов от маяков выполняется по способу измерения структуры импульсной функции отклика во времени в неоднородной среде (п. РФ №2577561). Для этого в каждом из М каналов после регистрации импульсных (лучевых) приходов, определяется их число и строится структурная функция приходов (то есть определяется взаимосвязь предыдущих измерений с текущими), таким образом исключаются ошибки, связанные с вариациями амплитуды сигнала во времени - исчезновением или появлением новых максимумов, а также изменения количества максимумов в измеряемой серии. Время прихода импульса определяется абсолютно точно - как положение точки максимума на оси времени, в то время как в прототипе, время прихода импульса определяется в зависимости от задаваемого уровня амплитудного компаратора и от вида переднего фронта определяемого импульса.
Ниже для упрощения, представлено описание схемы и работы системы, включающей заявляемый минимум маяков-приемоответчиков, (хотя количество маяков ответчиков не ограничивается и может быть любым больше трех).
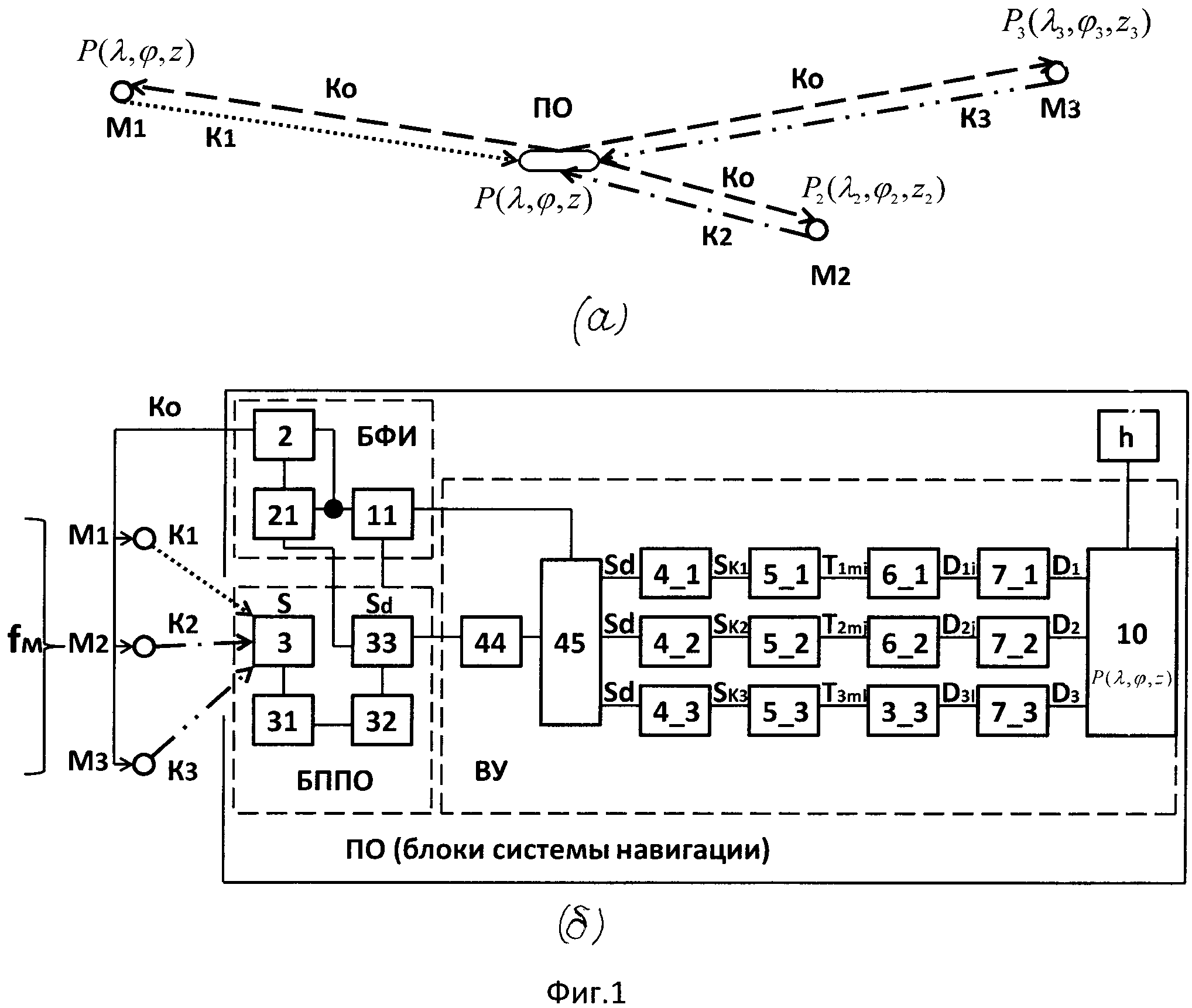
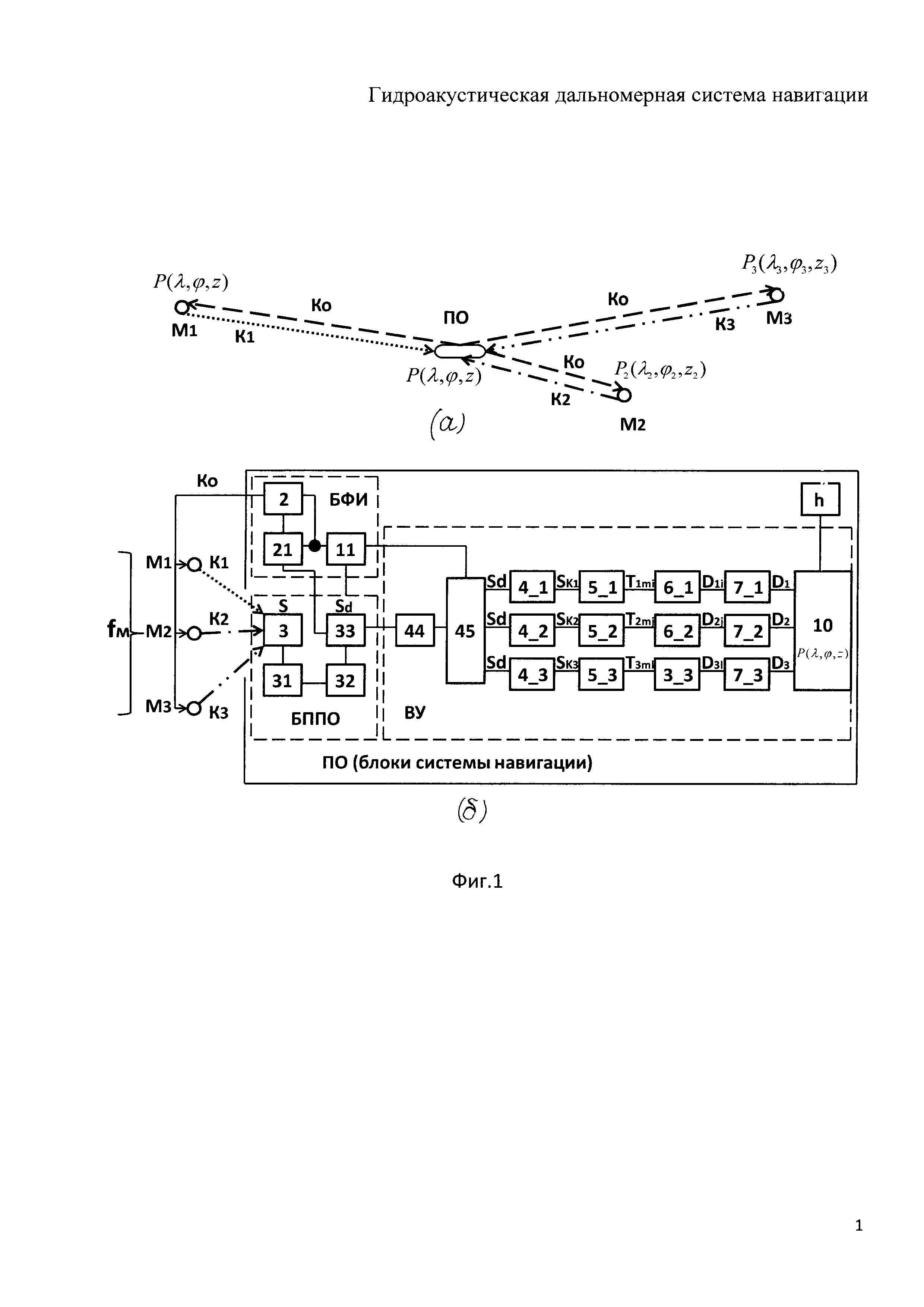
На фиг. 1 (а, б) приведена структурная схема (блок-схема) заявляемой системы для трех маяков приемопередатчиков, где
(а) - схема обмена навигационными сигналами и сигналами опроса между подводным объектом и маяками.
(б) - блок схема заявляемой системы:
M1, М2, М3 - навигационные акустические маяки приемоответчики;
ПО - объект навигации;
Kо - кодовый акустический импульсный сигнал опроса маяков с подводного устройства с частотой заполнения fм;
K1, K2, K3 - кодовые импульсные акустические навигационные сигналы с маяков приемоответчиков;
Р(λ, ϕ, z) - пространственные координаты подводного устройства;
Pi(λi, ϕi, zi) - пространственные координаты маяков приемоответчиков;
h - датчик глубины;
Блок формирования и излучения сигналов (БФИ)
2 - передатчик кодового акустического импульсного сигнала опроса навигационных маяков;
21 - генератор-формирователь электрического кодоимпульсного сигнала опроса навигационных маяков;
11 - таймер с генератором синхроимпульсов для запуска генератора-формирователя 21 и передатчика кодового сигнала опроса 2;
Блок приема и первичной обработки сигналов (БППО)
3 - одноканальный приемник - акустоэлектрический преобразователь - кодоимпульсных акустических сигналов от навигационных маяков;
31 - усилитель кодоимпульсных электрических сигналов;
32 - полосовой фильтр с центральной частотой fм, для фильтрации кодоимпульсных электрических сигналов;
33 - аналого-цифровой преобразователь (АЦП) кодоимпульсных электрических сигналов;
Вычислительное устройство (ВУ)
44 - блок памяти;
45 - электронный коммутатор;
4_1 - блок коррелятора сигнала SK1 от маяка M1;
4_2 - блок коррелятора сигнала SK2 от маяка М2;
4_3 - блок коррелятора сигнала SK3 от маяка М3;
5_1 - блок поиска максимумов в зависимости коэффициента корреляции от времени и определения времени распространения импульсов для сигнала от маяка M1;
5_2 - блок поиска максимумов в зависимости коэффициента корреляции от времени и определения времени распространения импульсов для сигнала от маяка М2;
5_3 - блок поиска максимумов в зависимости коэффициента корреляции от времени и определения времени распространения импульсов для сигнала от маяка М3;
6_1 - блок определения дистанций для сигналов от маяка M1;
6_2 - блок определения дистанций для сигналов от маяка М2;
6_3 - блок определения дистанций для сигналов от маяка М3;
7_1 - блок определения средней дистанции от маяка M1;
7_2 - блок определения средней дистанции от маяка М2;
7_3 - блок определения средней дистанции от маяка М3;
10 - блок вычисления координат объекта навигации.
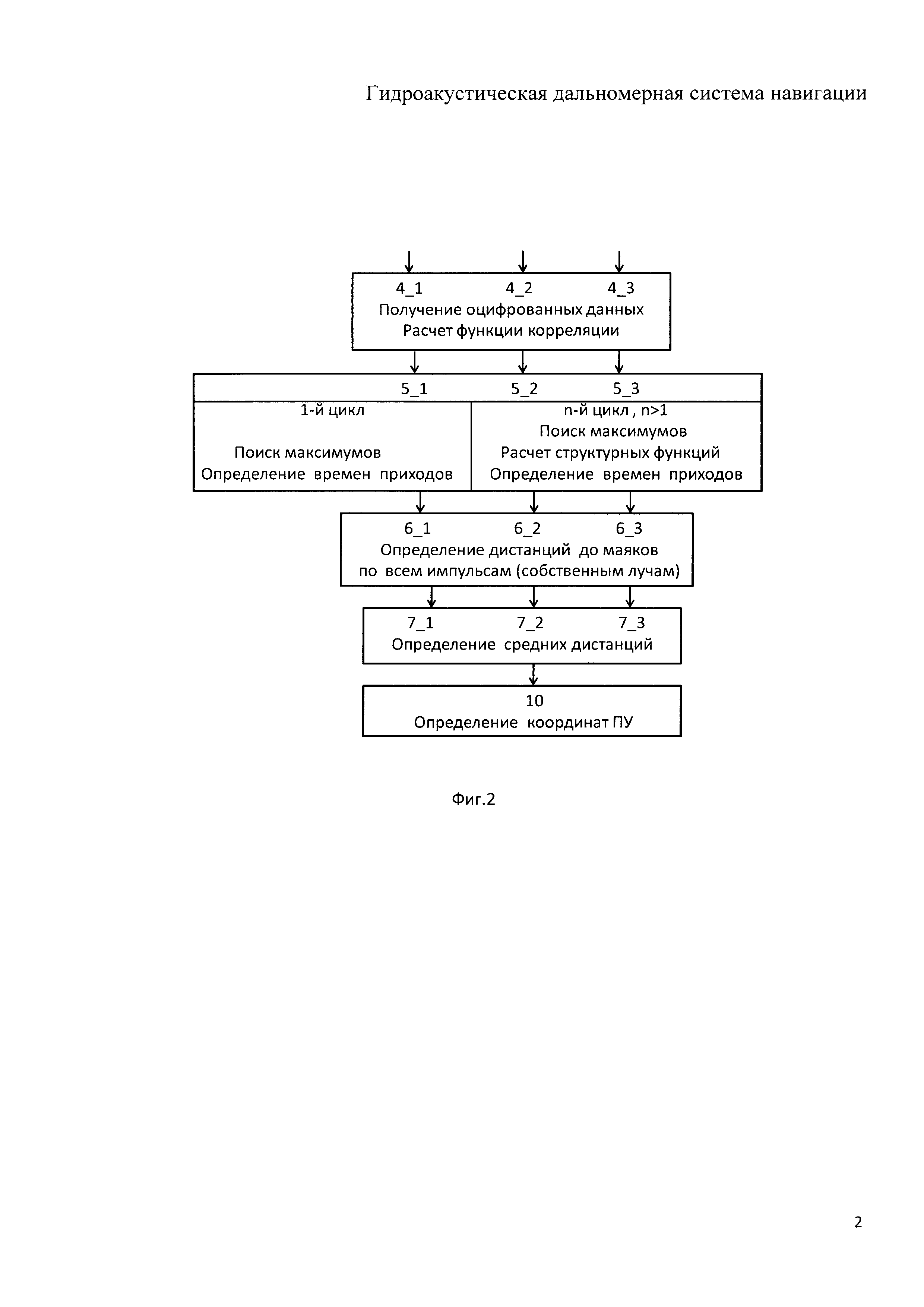
На фиг. 2 приведена схема обработки цифровых данных в блоках ВУ.
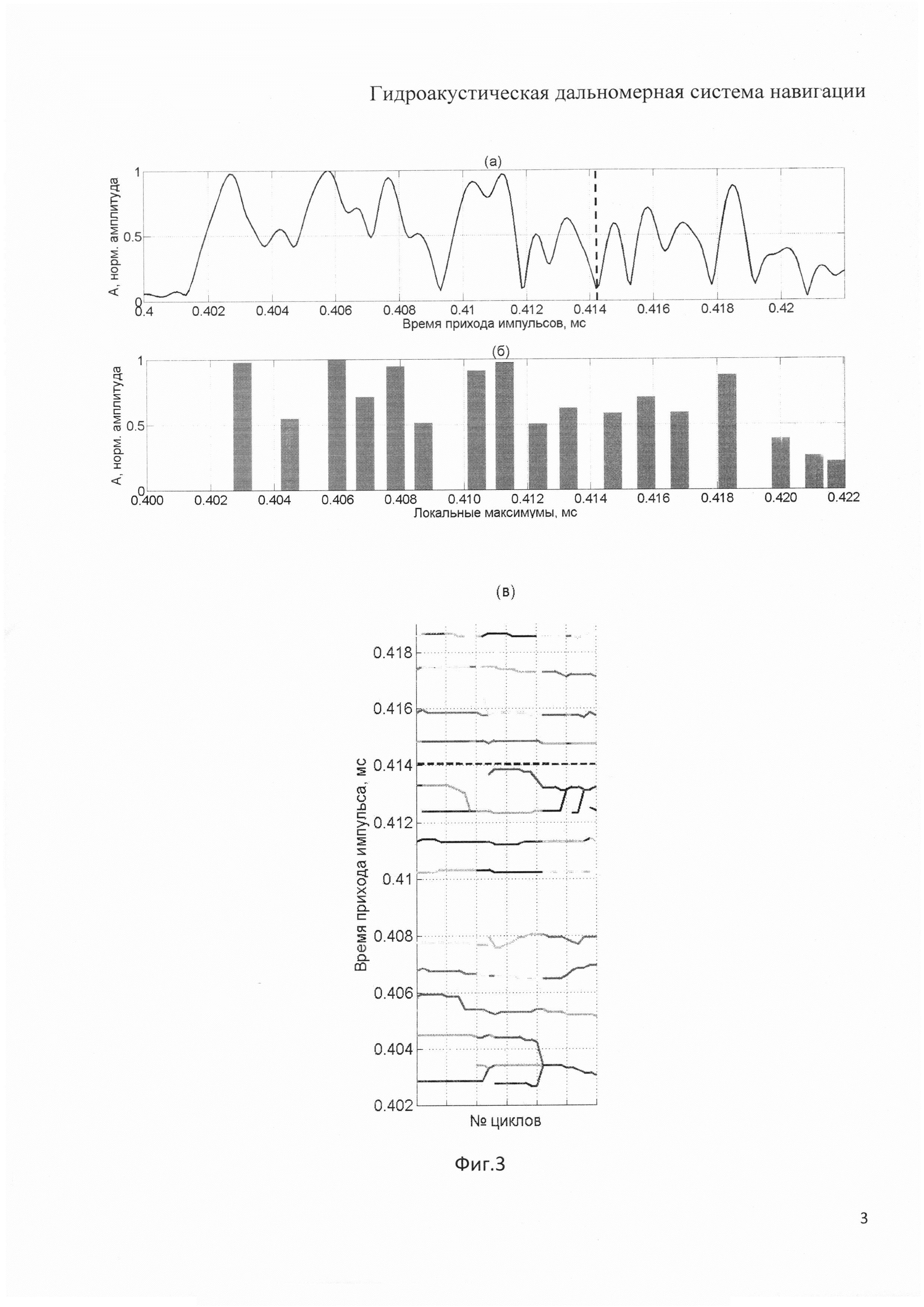
На фиг. 3 изображены в графическом виде последовательно во времени результаты цифровой обработки принятых сигналов с маяков в блоках ВУ, где
(а) - результат корреляционной обработки сигналов от маяков (блоки 4_1, 4_2 и 4_3).
(б) - результат поиска максимумов и определения времени распространения импульсов от маяков (блоки 5_1, 5_2 и 5_3).
(в) - результат построения структурной функции приходов импульсов от маяков для второго и последующих циклов (блоки 5_1, 5_2 и 5_3)
Позиционирование и навигация объекта навигации (ПО) заявляемой системой осуществляется следующим образом. Маяки приемоответчики размещают стационарно на дне или по глубине акватории в точках с известными и не изменяющимися в процессе цикла навигации объекта координатами. Затем, следующими друг за другом циклами, включающими процесс опроса маяков, приема, фильтрации, преобразования и регистрации сигналов от маяков, выделения кодоимпульсных сигналов пришедших от маяков по различным траекториям и определение их параметров, определяют дистанции до маяков и выполняют позиционирование в системе координат маяков. Указанные процессы выполняются следующим образом: в момент времени t0 (начало первого цикла позиционирования) таймер с генератором синхроимпульсов 11 включает генератор синхроимпульсов, который подает сигнал на запуск генератора-формирователя 21 кодового сигнала опроса Kо. Этим же сигналом включается передатчик 2 и блок приема и первичной обработки сигналов (БППО). Первый кодоимпульсный сигнал опроса Kо с генератора-формирователя 21 поступает на вход передатчика 2, усиливается и излучается в водную среду. Акустический сигнал опроса, излучаемый в водную среду, представляет собой кодоимпульсный акустический импульс расширенного спектра Kо с частотой заполнения fм. Навигационные маяки приемоответчики M1, М2, М3, в моменты времени t1, t2 и t3 соответственно, принимают и выделяют 1-й кодоимпульсный сигнал Kо из серии сигналов Koi, i=1, 2…nm, где i - это номера, a nm - число собственных лучей, по которым распространяются сигналы опроса от ПО до каждого маяка, m=1, 2, 3. Первый импульс соответствует распространению по кратчайшей траектории распространения звука между ПО и каждым маяком приемоответчиком. Затем, в моменты времени t1+Δ, t2+Δ и t3+Δ, где Δ - заданная задержка, приемоответчики излучают уникальные для каждого маяка, кодоимпульсные сигналы K1, K2 и K3.
Излученные маяками М сигналы K1, K2 и K3 распространяются в обратном направлении от маяков к ПО, испытывая отражения от границ и преломляясь на неоднородностях в акустическом канале и, вместе с окружающим акустическим шумом, принимаются одним многоканальным приемником 3 блока приема и первичной обработки сигналов (БППО), выполненным в виде, например, акустоэлектрического преобразователя, электрический сигнал S с приемника 3 подается на усилитель 31 и усиливается в полосе рабочей частоты fм, после чего поступает на полосовой фильтр 32 с центральной частотой пропускания fм. После фильтрации электрический сигнал подается на аналого-цифровой преобразователь (АЦП) электрических сигналов 33. Результаты акустических измерений и их первичной обработки с выхода АЦП, в цифровом виде Sd, передаются в вычислительное устройство ВУ. Указанные выше операции выполняются с момента времени t0 непрерывно, в реальном масштабе времени, до окончания цикла позиционирования ПО.
Переданные в ВУ результаты первичной обработки акустических измерений в цифровом виде Sd поступают в блок памяти 44, который соединен с блоком выборки и управления данными памяти (электронным коммутатором) - 45, который в свою очередь соединен с таймером и генератором синхроимпульсов 11, для привязки результатов первичных акустических измерений к текущим значениям времени ti в цикле позиционирования - Sd(ti) и направления полученного массива цифровых данных параллельно на три канала обработки (фиг. 2).
Каждый выход коммутатора соединен со входами блоков цифровых корреляторов, которые осуществляют корреляционную обработку: в блоке 4_1 выполняется расчет текущего коэффициента корреляции во времени SK1(ti) между принимаемым сигналом Sd и оцифрованным кодовым импульсным акустическим навигационным сигналом («электронной маской») K1d с маяка M1. В блоке 4_2 выполняет расчет текущего коэффициента корреляции во времени SK2(ti) между принимаемым сигналом Sd и оцифрованным кодовым импульсным акустическим навигационным сигналом («электронной маской») K2d с маяка М2. Блок 4_3 выполняет расчет текущего коэффициента корреляции во времени SK3(ti) между принимаемым сигналом Sd и оцифрованным кодовым импульсным акустическим навигационным сигналом («электронной маской») K3d и кодовым импульсным акустическим навигационным сигналом K3 с маяка М3. На фиг. 3(a) приведен вид коэффициента корреляции по результатам расчетов в блоках цифровых корреляторов.
Цифровые значения коэффициентов корреляции SK1, SK2 и SK3, рассчитанные по маскам сигналов для каждого маяка, поступают с выходов блоков корреляции 4_1, 4_2 и 4_3 на входы блоков 5_1, 5_2 и 5_3 поиска максимумов коэффициентов корреляции в зависимости от времени и определения времени распространения импульсов для сигналов от маяков M1, М2 и М3. Поиск максимумов осуществляется на основании задаваемого критерия, по которому максимальные значения корреляции должны превышать на 20% значения корреляции «электронных масок» сигналов K1d, K2d и K3d с принимаемым сигналом окружающего шума Sш. Цикл позиционирования заканчивается по критерию избыточности - когда количество обнаруженных максимумов для всех каналов обработки (по всем маякам) превышает 10 максимумов (фиг. 3б) или по критерию ограниченной реверберации, когда промежуток времени с момента обнаружения последнего текущего максимума для всех каналов обработки (по всем маякам) превышает значение 0.2×T1Mi, где T1Mi - время распространения первого импульса до каждого маяка. Результаты поиска максимумов в каждом блоке 5_1, 5_2 и 5_3 имеют вид {N, t0, n, τn, An}, N=[1, 2, 3] - номер блока (маяка), t0 - время начала цикла, n=[1, 2…10] - номер максимума, τn - [1, 2, …10] - положение максимума на оси времени, An - амплитуды максимумом.
Времена распространения всех импульсов (максимумов) от всех маяков до ПО - TNmn в первом цикле позиционирования рассчитываются по найденным положениям максимумов корреляции в блоках 5_1, 5_2 и 5_3, с использованием временной синхронизации данных с помощью таймера и генератора синхроимпульсов 11 по формулам, приведенным в таблице 1.
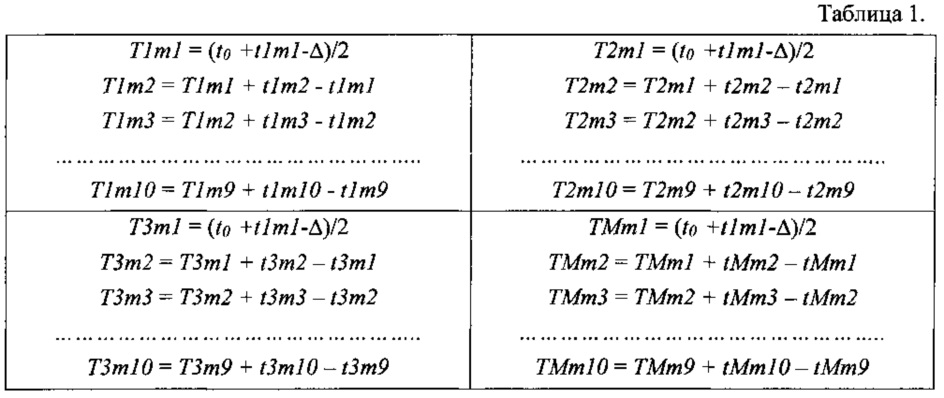
На втором и всех последующих циклах измерений (tn, n>0) в блоках 5_1, 5_2 и 5_3 после нахождения максимумов коэффициентов корреляции, для идентификации номеров приходящих импульсов, выполняется расчет структурных функции времен приходов регистрируемых импульсов в виде фиг. 3(в), в соответствии с выражением (1):

где Si,i+1,m двумерного евклидового расстояние между всеми максимумами Am,i в следующих друг за другом блоках данных  (например, патенту РФ №2577561). После чего определяются порядковые номера и характеристики приходящих импульсов в текущем цикле измерений - амплитуда и положение на оси времени {N, tk, n, τk, Ak}, для каждого сигнала от маяков M1, М2 и М3 (фиг. 3в). Времена распространения всех импульсов (максимумов) от всех маяков до ПО - TNmn рассчитываются по положениям максимумов корреляции в блоках 5_1, 5_2 и 5_3, с использованием временной синхронизации данных с помощью таймера и генератора синхроимпульсов 11 по формулам, приведенным в Таблице 2:
(например, патенту РФ №2577561). После чего определяются порядковые номера и характеристики приходящих импульсов в текущем цикле измерений - амплитуда и положение на оси времени {N, tk, n, τk, Ak}, для каждого сигнала от маяков M1, М2 и М3 (фиг. 3в). Времена распространения всех импульсов (максимумов) от всех маяков до ПО - TNmn рассчитываются по положениям максимумов корреляции в блоках 5_1, 5_2 и 5_3, с использованием временной синхронизации данных с помощью таймера и генератора синхроимпульсов 11 по формулам, приведенным в Таблице 2:

Рассчитанные в блоках 5_1, 5_2 и 5_3 значения времен распространения импульсов T1mn, T2mn и T3mn передаются в блоки 6_1, 6_2 и 6_3, где определяются дистанции по собственным лучам D1j, D2j и D3j (j=1, 2…10) от ПО до маяков M1, М2 и М3, соответственно. Для расчетов дистанций могут использоваться известные модели распространения собственных лучей в волноводе, с параметрами среды в районе размещения маяков и позиционирования ПО.
Значения дистанций, рассчитанные по собственным лучам D1j, D2j и D3j (j=1, 2…10) от ПО до маяков M1, М2 и М3, соответственно передаются в цифровом виде из блоков 6_1, 6_2 и 6_3 в блоки 7_1, 7_2 и 7_3 для определения расчетных (точных) дистанций D1, D2 и D3. Для расчета точных дистанций может использоваться схема с усреднением дистанций по всем, принимаемым в цикле измерения, импульсам (собственным лучам) и/или схемы выбора группы наиболее устойчивых или имеющих максимальную амплитуду импульсов и определение точных дистанций по этим импульсам.
Значения дистанций D1, D2 и D3 передаются в блок 10 для выполнения позиционирования ПО методом триангуляции (с уточнением значений по измеряемой глубине h) относительно маяков M1, М2 и М3 и расчета абсолютных географических координат ПО. Второй и последующие циклы позиционирования заканчиваются по критерию избыточности - когда количество обнаруженных максимумов для всех каналов обработки (по всем маякам) превышает заданное число максимумов или по критерию ограничения времени реверберации, когда промежуток времени с момента обнаружения последнего текущего максимума для всех каналов обработки (по всем маякам) превышает значение 0.2×T1Mi, где T1Mi - время распространения первого импульса до каждого маяка.
Таким образом, предлагаемая конструкция гидроакустической системы навигации позволяет получить заявленный технический результат - повышение точности и надежности измерения дистанций и подводного позиционирования ПО в условиях многолучевого распространения навигационных сигналов в мелководных акваториях при одновременном снижении технической сложности и энергопотребления, за счет использования одиночных приемников и одночастотных передатчиков навигационных сигналов на маяках и ПО, за счет увеличения соотношение сигнал/шум при использовании, согласованной с сигналами, цифровой обработки и путем реализации измерений времени распространения сигналов и определения дистанций до маяков и позиционирования в пространстве по измеренным параметрам собственных лучей (импульсов), для которых с целью устранения ошибок, выполняется идентификация, верификация и сопровождение во времени.
Метод мониторинга вертикального распределения скорости звука в условиях мелководных акваторий
Подводный планер (варианты)
Способ определения вертикальной скорости продольных волн в слоях анизотропной среды
Способ и устройство для измерения ускорения силы тяжести
Способ регистрации дыхательных звуков на поверхности грудной клетки и комбинированный приемник для осуществления способа
Комбинированный гидроакустический приемник для гибкой протяженной буксируемой антенны
Автономное устройство для регистрации скорости и направления течения жидкости и газа
Способ картирования археологических объектов
Цифровой комбинированный векторный приемник с синтезированными каналами
Метод пассивного акустического мониторинга придонных газожидкостных потоков
Метод мониторинга вертикального распределения скорости звука в условиях мелководных акваторий
Подводный планер (варианты)
Способ определения вертикальной скорости продольных волн в слоях анизотропной среды
Способ и устройство для измерения ускорения силы тяжести
Способ регистрации дыхательных звуков на поверхности грудной клетки и комбинированный приемник для осуществления способа
Комбинированный гидроакустический приемник для гибкой протяженной буксируемой антенны
Автономное устройство для регистрации скорости и направления течения жидкости и газа
Способ картирования археологических объектов
Цифровой комбинированный векторный приемник с синтезированными каналами
Метод пассивного акустического мониторинга придонных газожидкостных потоков

