Результат интеллектуальной деятельности: Способ определения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем
Вид РИД
Изобретение
Изобретение относится к области дифференциальных навигационных систем и применимо для высокоточной навигации, геодезии, ориентации объектов в пространстве по сигналам глобальных навигационных спутниковых систем (ГНСС – ГЛОНАСС, GPS, Galileo, Bei Dou и другие), в которых используются измерения фазы несущих колебаний. В дифференциальных системах точное определение взаимного положения объектов производится по разностям псевдофазовых измерений, получаемых в разнесенных на местности навигационных приемниках.
Основной проблемой использования фазовых измерений является неоднозначность этих измерений, связанная с циклической природой фазы. Обычно раскрытие неоднозначности осуществляется по результатам измерений, полученным на нескольких эпохах, т.е. на относительно длительном интервале наблюдений с использованием фильтрации [1-3]. Известны также способы раскрытия неоднозначности фазовых измерений, относящихся к одной эпохе, на основе минимума среднеквадратической погрешности места определения, метода наименьших квадратов и функций неоднозначности, являющихся частным случаем метода максимального правдоподобия [1, 4-8].
Все известные [1-8] способы раскрытия неоднозначности основаны на нахождении целого числа циклов, содержащихся в разностях псевдофазовых измерений, формируемых для каждого спутника. Для повышения точности позиционирования и вероятности правильного раскрытия неоднозначности желательно увеличивать используемое количество спутников, т.е. увеличивать число измерений. Однако каждое новое неоднозначное измерение может характеризоваться своим неопределенным числом и поэтому увеличение числа измерений приводит к росту числа переменных, которые необходимо оценивать при обработке [1].
Предлагаемый способ позволяет определять взаимное положение объектов по неоднозначным фазовым измерениям, полученным для одной эпохи, без непосредственного вычисления целого числа циклов, содержащихся в первых разностях псевдофазовых измерений, и без использования вторых разностей. Он применим также при одновременном использовании нескольких различных ГНСС, например ГЛОНАСС и GPS.
Техническим результатом изобретения является повышение точности и надежности определения взаимного положения объектов при сокращении времени вычислений.
Взаимное положение объектов определяется вектором базисной линии, т.е. в рассматриваемых системах, пространственными координатами линии, на концах которой находятся фазовые центры антенн, принимающих сигналы навигационных спутников.
Технический результат достигается тем, что Способ определения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем, заключается:
в приеме сигналов от двух или одной спутниковых группировок на две разнесенные приемные антенны, относительные координаты фазовых центров которых образует вектор базисной линии;
измерении в первом и втором приемниках псевдодальностей по коду и полных псевдофаз  и
и  соответственно («сырые» измерения)[Примечание: Полную псевдофазу иногда образуют [3] добавлением к целой части кодовой псевдодальности (выраженной в длинах волн) дробной части измеренной в циклах псевдофазы.];
соответственно («сырые» измерения)[Примечание: Полную псевдофазу иногда образуют [3] добавлением к целой части кодовой псевдодальности (выраженной в длинах волн) дробной части измеренной в циклах псевдофазы.];
нахождении по кодовым измерениям псевдодальностей в геоцентрической системе координат приближенных значений координат первой приемной антенны { ,
,  }, второй приемной антенны
}, второй приемной антенны
{ ,
,  } и параметров, определяющих расхождения временных шкал первого и второго приемников от системного времени спутниковых группировок GPS (
} и параметров, определяющих расхождения временных шкал первого и второго приемников от системного времени спутниковых группировок GPS ( и
и  ) и ГЛОНАСС (
) и ГЛОНАСС ( и
и  ), а также поправок на запаздывание сигнала в атмосфере;
), а также поправок на запаздывание сигнала в атмосфере;
задании в геоцентрической системе координат вектора базисной линии, начало которого находится в точке {, }, а конец – в области Q с центром в точке {, }, размеры которой определяются суммарными погрешностями вычислений координат первой и второй приемных антенн по кодовым измерениям;
формировании первых разностей измеренных первым и вторым приемниками псевдофаз с учетом внесения поправок на запаздывание сигналов в тропосфере, ионосфере, известных аппаратурных задержек, включая калибровочные поправки межлитерных задержек ГЛОНАСС, и т.п.:
 , (1)
, (1)
где для спутников GPS  , а для спутников ГЛОНАСС –
, а для спутников ГЛОНАСС –  ,
,
 – дальности между фазовым центром передающей антенны j-го спутника в момент излучения навигационного сигнала и фазовыми центрами соответственно первой и второй приемной антенны в моменты приема ими этого сигнала (по шкале спутниковой группировки),
– дальности между фазовым центром передающей антенны j-го спутника в момент излучения навигационного сигнала и фазовыми центрами соответственно первой и второй приемной антенны в моменты приема ими этого сигнала (по шкале спутниковой группировки),
 и
и  – частоты принимаемого приемниками 1 и 2 сигнала j-го спутника (с учетом доплеровского смещения частоты),
– частоты принимаемого приемниками 1 и 2 сигнала j-го спутника (с учетом доплеровского смещения частоты),
 – номинальная частота сигнала, излучаемого j-м спутником (для ГЛОНАСС – частота сигнала нулевого литера),
– номинальная частота сигнала, излучаемого j-м спутником (для ГЛОНАСС – частота сигнала нулевого литера),
 – расхождение временных шкал первого и второго приемников (в трактах GPS
– расхождение временных шкал первого и второго приемников (в трактах GPS  , в трактах ГЛОНАСС
, в трактах ГЛОНАСС  ),
),
 – разность начальных фаз в трактах опорных генераторов первого и второго приемников (в трактах GPS
– разность начальных фаз в трактах опорных генераторов первого и второго приемников (в трактах GPS  , в трактах ГЛОНАСС –
, в трактах ГЛОНАСС – 
 – неизвестные целые числа, равные разности целых чисел циклов фаз сигналов опорных генераторов в счетчиках измерения полной фазы приемников 1 и 2, определяющих их начальное состояние на момент измерения [3],
– неизвестные целые числа, равные разности целых чисел циклов фаз сигналов опорных генераторов в счетчиках измерения полной фазы приемников 1 и 2, определяющих их начальное состояние на момент измерения [3],
 – разность погрешностей псевдофазовых измерений в приемниках за счет ошибок многолучевости, шумов, нескомпенсированных задержек в атмосфере и т.п.;
– разность погрешностей псевдофазовых измерений в приемниках за счет ошибок многолучевости, шумов, нескомпенсированных задержек в атмосфере и т.п.;
составлении системы уравнений, связывающих измеренные значения разности псевдофаз (1) с искомыми смещениями координат конца вектора базисной линии  от приближенных значений этих координат
от приближенных значений этих координат
{ ,
,  }, найденных по кодовым измерениям, для чего в выражение (1) подставляют
}, найденных по кодовым измерениям, для чего в выражение (1) подставляют
 , (2)
, (2)
 , (3)
, (3)
где  ,
,  – координаты j-го спутника в момент излучения навигационного сигнала;
– координаты j-го спутника в момент излучения навигационного сигнала;
отличающейся тем, что измеренные разности псевдофаз (в метрах) выражают через значения дальностей  и оценки дальностей
и оценки дальностей  , при этом вычисляют по формуле (3) для координат антенны 2 в момент приема
, при этом вычисляют по формуле (3) для координат антенны 2 в момент приема  навигационных сигналов (по шкале времени приемника 2) и координат j-го спутника на момент излучения им соответствующего сигнала (предшествующего ), а оценку находят по формуле (2) для координат антенны (1) в момент приема
навигационных сигналов (по шкале времени приемника 2) и координат j-го спутника на момент излучения им соответствующего сигнала (предшествующего ), а оценку находят по формуле (2) для координат антенны (1) в момент приема  сигналов (по шкале времени приемника 1) и координат j-го спутника на время, смещенное на величину от момента излучения им соответствующего сигнала (предшествующего
сигналов (по шкале времени приемника 1) и координат j-го спутника на время, смещенное на величину от момента излучения им соответствующего сигнала (предшествующего  ):
):
 , (4)
, (4)
где  – разность псевдофаз в метрах, (5)
– разность псевдофаз в метрах, (5)
 ,
,  – коэффициенты, характеризующие использование спутниковых группировок GPS и ГЛОНАСС в системе уравнений (4), а именно
– коэффициенты, характеризующие использование спутниковых группировок GPS и ГЛОНАСС в системе уравнений (4), а именно
 ,
,  =
= ,
,
 – неизвестные целые числа,
– неизвестные целые числа,
 – подлежащие оценке дробные части разности начальных фаз на несущей частоте GPS и нулевом литере частоты ГЛОНАСС,
– подлежащие оценке дробные части разности начальных фаз на несущей частоте GPS и нулевом литере частоты ГЛОНАСС,
 – длина волны несущего сигнала GPS,
– длина волны несущего сигнала GPS,
 – длина волны нулевого литера несущего сигнала ГЛОНАСС;[ Примечание: В формуле (4) первое слагаемое равно разности дальностей в результате пространственного разнесения антенн приемников 1 и 2, а второе (для GPS) и третье (для ГЛОНАСС) слагаемые связаны только с расхождением временных шкал приемников.]
– длина волны нулевого литера несущего сигнала ГЛОНАСС;[ Примечание: В формуле (4) первое слагаемое равно разности дальностей в результате пространственного разнесения антенн приемников 1 и 2, а второе (для GPS) и третье (для ГЛОНАСС) слагаемые связаны только с расхождением временных шкал приемников.]
для нахождения смещений в области Q параллельно координатным осям проводят плоскости с интервалами  , начиная от {, }, точки пересечения которых образуют узлы с координатами
, начиная от {, }, точки пересечения которых образуют узлы с координатами  , где
, где  – номера узлов по осям x, y, z;
– номера узлов по осям x, y, z;
согласно выбранной стратегии поиска вычисляют вероятность нахождения искомых координат первой антенны в окрестностях указанных узлов при условии, что значение первых разностей псевдофаз равны  (по сути это соответствует построению многомодальной функции правдоподобия в трехмерном пространстве, заданном координатами антенны 1, при этом параметры
(по сути это соответствует построению многомодальной функции правдоподобия в трехмерном пространстве, заданном координатами антенны 1, при этом параметры  и
и  подлежат определению для каждого шага поиска), для чего представляют текущие оценки смещения координат на l-м шаге поиска при r-м вычислении поправок
подлежат определению для каждого шага поиска), для чего представляют текущие оценки смещения координат на l-м шаге поиска при r-м вычислении поправок  в виде
в виде
 ;
;  ;
;  ,
,
где  – номер узла (шага поиска),
– номер узла (шага поиска),
 – номер вычисляемой поправки на l-м шаге поиска (для r=1
– номер вычисляемой поправки на l-м шаге поиска (для r=1  );
);
с учетом (4), используя линеаризацию выражения (2) в точке { , составляют систему линейных уравнений вида
, составляют систему линейных уравнений вида

 (6)
(6)
 – оценка дальности от j-го спутника до антенны 1, вычисленная по кодовым измерениям,
– оценка дальности от j-го спутника до антенны 1, вычисленная по кодовым измерениям,
где  – величины, обратные по знаку направляющим косинусам из точки { на j –ый спутник,
– величины, обратные по знаку направляющим косинусам из точки { на j –ый спутник,
 – неизвестные целые числа циклов фазы при оценке смещений координат для j-го канала GPS или ГЛОНАСС на l-м шаге поиска при r-м вычислении поправок,
– неизвестные целые числа циклов фазы при оценке смещений координат для j-го канала GPS или ГЛОНАСС на l-м шаге поиска при r-м вычислении поправок,
 – определяемые на l-м шаге для r-й поправки дробные части оценки начальных фаз на несущей частоте GPS и нулевом литере частоты ГЛОНАСС (для
– определяемые на l-м шаге для r-й поправки дробные части оценки начальных фаз на несущей частоте GPS и нулевом литере частоты ГЛОНАСС (для  полагаем
полагаем  ),
),
 – взаимные разности (выраженные в метрах) между оценками разностей псевдофаз
– взаимные разности (выраженные в метрах) между оценками разностей псевдофаз  , вычисленными для найденных координат первой приемной антенны на l-м шаге поиска для
, вычисленными для найденных координат первой приемной антенны на l-м шаге поиска для  -й поправки, и измеренными (определенными по формуле (5)) значениями ;
-й поправки, и измеренными (определенными по формуле (5)) значениями ;
находят оценку разностей псевдофаз, соответствующих координатам первой приемной антенны в l-узле при , по формуле
 ; (7)
; (7)
формируют с учетом (7) систему уравнений (6) для l-го узла при  , удаляя из
, удаляя из  и целое число длин волн (циклов фазы):
и целое число длин волн (циклов фазы):
 (8)
(8)
где  – означает операцию удаления из
– означает операцию удаления из  целого числа (оставление дробной части) путем вычитания ближайшего целого числа;
целого числа (оставление дробной части) путем вычитания ближайшего целого числа;
решают систему уравнений (8) методом наименьших квадратов (МНК), находя  ;
;
подставляют найденные решения в систему уравнений (6), переходя к вычислению следующей ( ) поправки, и аналогичным образом находят поправки
) поправки, и аналогичным образом находят поправки  и параметры
и параметры  ;
;
проверяют выполнение условий
 ,
,  ,
,  ,
,
если все они выполняются, то считают поиск смещений координат первой приемной антенны на l-м шаге завершенным, если нет, то переходят к вычислению следующей ( ) поправки. (Примечание. Если число вычисляемых поправок превышает 4, то продолжение вычислений считается нецелесообразным из-за наличия одного или более аномальных фазовых измерений – требуется отбраковка проведенных измерений);
) поправки. (Примечание. Если число вычисляемых поправок превышает 4, то продолжение вычислений считается нецелесообразным из-за наличия одного или более аномальных фазовых измерений – требуется отбраковка проведенных измерений);
обозначают соответствующие найденным на l-м шаге поправкам смещения координат  и параметры
и параметры  и вводят вектор невязок следующим образом:
и вводят вектор невязок следующим образом:
 ,
,  – для измерений GPS,
– для измерений GPS,
 ,
,  – для измерений ГЛОНАСС,
– для измерений ГЛОНАСС,
где  находят по формуле (6) при
находят по формуле (6) при  и
и  ;
;
вычисляют среднеквадратическое отклонение невязок на l-м шаге
 ,
,
и сравнивают его с априорно заданным порогом  : если
: если  , то принимают найденные на l-м шаге поиска координаты первой приемной антенны за искомые, в противном случае – переходят к
, то принимают найденные на l-м шаге поиска координаты первой приемной антенны за искомые, в противном случае – переходят к  -му шагу,
-му шагу,
если для всех шагов поиска  , то за искомые координаты первой приемной антенны принимают координаты, определенные на том шаге поиска
, то за искомые координаты первой приемной антенны принимают координаты, определенные на том шаге поиска  , для которого СКО невязок будет минимальным;
, для которого СКО невязок будет минимальным;
вычисляют для найденных на  -м шаге поиска координат первой приемной антенны координаты вектора базисной линии:
-м шаге поиска координат первой приемной антенны координаты вектора базисной линии:  ,
,  ,
,  , определяющие взаимное положение объектов.
, определяющие взаимное положение объектов.
Принципиальным отличием предложенного способа от всех известных является то, что в нем вместо раскрытия неоднозначности фазовых измерений, т.е. нахождения целого числа периодов, содержащихся в первых разностях псевдофаз, производится устранение целочисленной неоднозначности при сохранении дробных частей псевдофаз. При этом поиск (перебор) ведется в соответствии с выбранной стратегией в трехмерном пространстве, в котором находятся искомые координаты. Область и стратегия поиска зависят от качества исходных измерений и динамики объектов. Выбор и оптимизация их выходит за рамки настоящего изобретения.
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами.
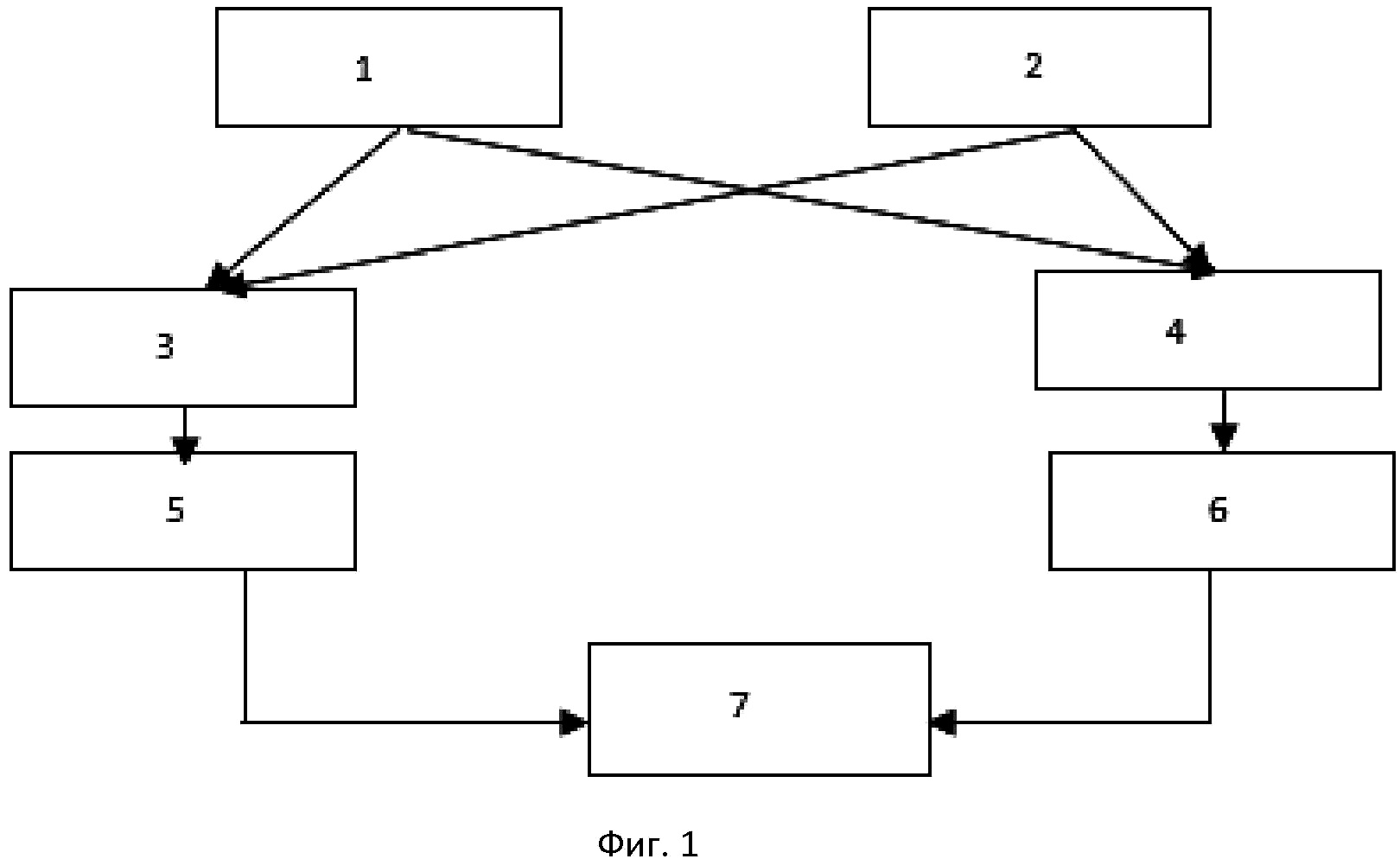
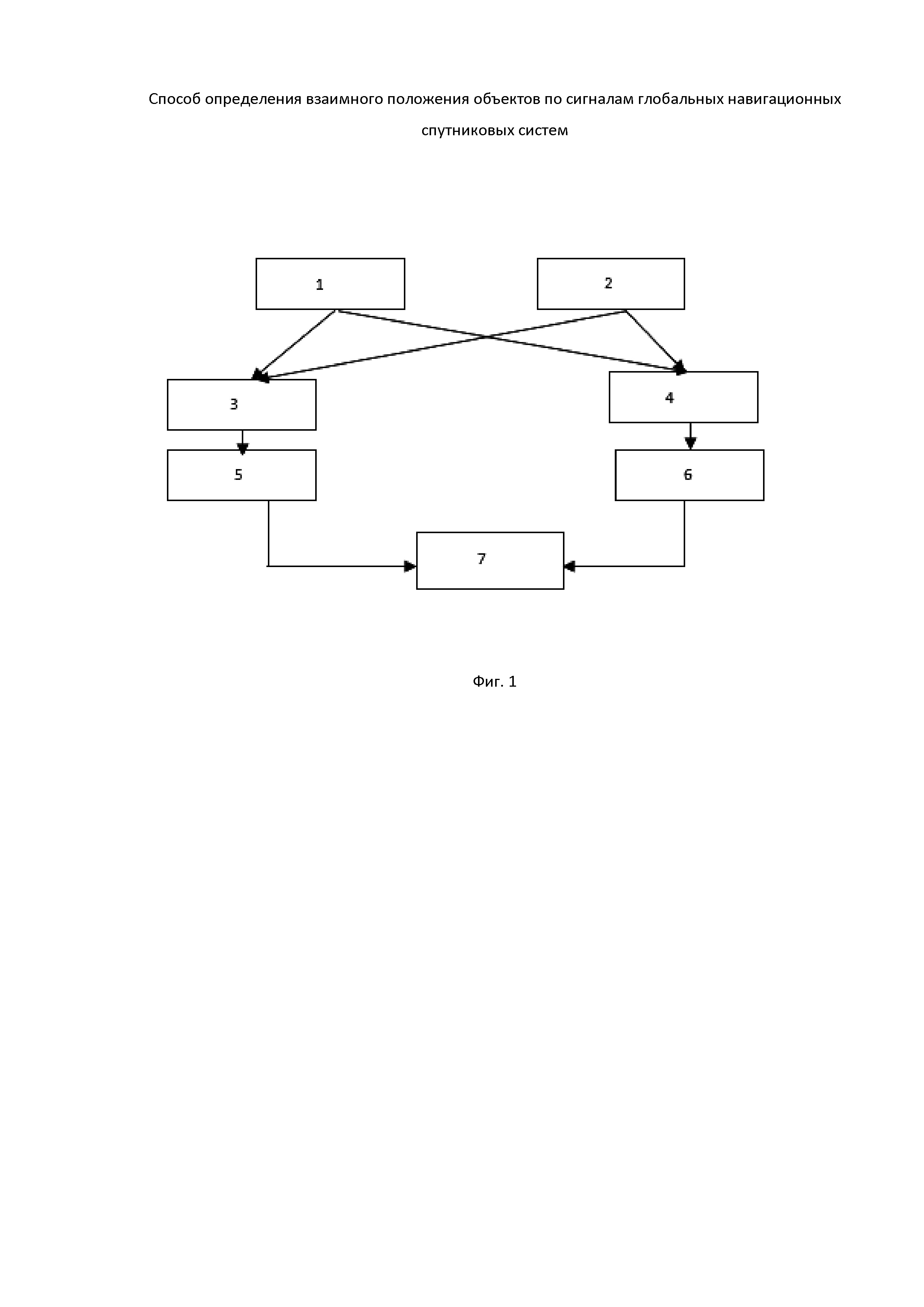
На Фиг. 1 представлен пример системы, реализующей способ измерения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем, где
1. Первая орбитальная группировка навигационных спутников;
2. Вторая орбитальная группировка навигационных спутников;
3. Первая приемная антенна;
4. Вторая приемная антенна;
5. Первый приемник;
6. Второй приемник;
7. Блок вычислений взаимного положения объектов.
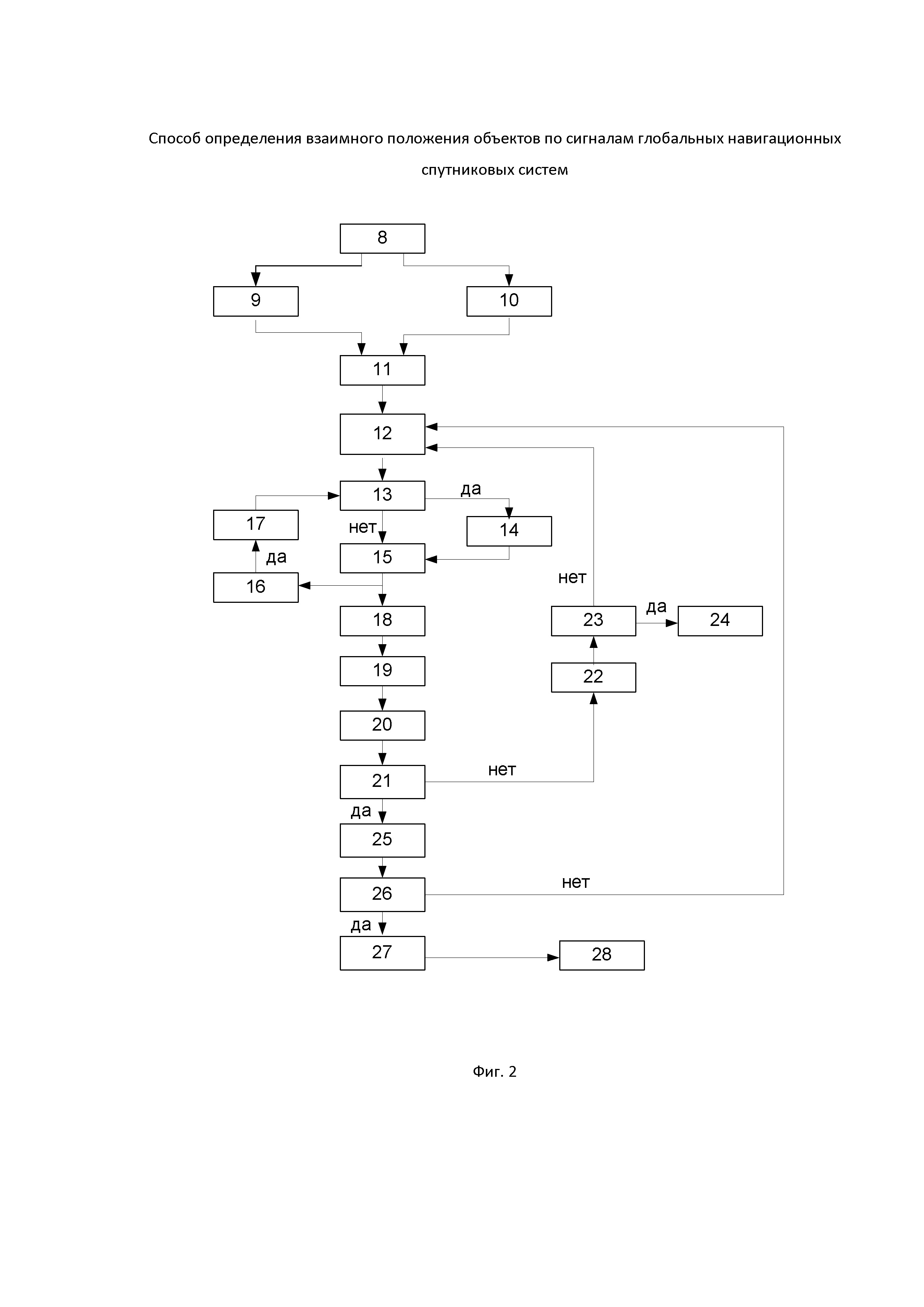
На Фиг. 2 представлен алгоритм работы блока вычислений взаимного положения объектов, где:
8. Предварительная обработка «сырых» измерений;
9. Решение навигационной задачи в геоцентрической системе координат (WGS84 или ПЗ-90) по кодовым измерениям для первого приемника;
10. Решение навигационной задачи в геоцентрической системе координат (WGS84 или ПЗ-90) по кодовым измерениям для второго приемника;
11. Формирование первых разностей псевдофазовых измерений  с учетом оценок значений дальностей до первой и второй приемных антенн от j-го спутника, координаты которого смещены на величины, соответствующие расхождению шкал времени первого и второго приемников;
с учетом оценок значений дальностей до первой и второй приемных антенн от j-го спутника, координаты которого смещены на величины, соответствующие расхождению шкал времени первого и второго приемников;
12. Формирование текущего смещения координат  первой приемной антенны от координат {, } на l-м шаге поиска в окрестности узла (заданного стратегией поиска) для r-й поправки;
первой приемной антенны от координат {, } на l-м шаге поиска в окрестности узла (заданного стратегией поиска) для r-й поправки;
13. Проверка наличия «флага», сформированного в блоке 17;
14. Смещение на 0,5 цикла фазы разности фазовых измерений в канале ГЛОНАСС на нулевой литерной частоте;
15. Вычисление взаимных разностей  между выраженными в метрах разностями фазовых измерений, рассчитанными для найденных на l-м шаге поиска для -й поправки смещений координат первой приемной антенны и измеренными значениями ;
между выраженными в метрах разностями фазовых измерений, рассчитанными для найденных на l-м шаге поиска для -й поправки смещений координат первой приемной антенны и измеренными значениями ;
16. Анализ величин  на наличие целого числа длин волн (только для r=2);
на наличие целого числа длин волн (только для r=2);
17. Формирование «флага» при наличии в  целого числа длин волн;
целого числа длин волн;
18. Удаление целого числа длин волн (циклов фазы) из и ;
19. Формирование системы линейных уравнений для r-й поправки на l-м шаге поиска;
20. Решение МНК сформированной системы уравнений;
21. Анализ полученных значений поправок координат («меньше порога»?);
22. Подсчет числа проходов вычисления поправок r на l-м шаге поиска;
23. Анализ текущего номера поправки (r>4?);
24. Прекращение поиска;
25. Введение вектора невязок и вычисление среднеквадратического отклонения (СКО) невязок на l-м шаге поиска;
26. Анализ СКО невязок («невязки меньше заданного порога»?);
27. Вычисление базисной линии для координат, найденных на шаге поиска;
28. Выдача результатов потребителю.
Способ измерения взаимного положения объектов по сигналам глобальных навигационных спутниковых систем работает следующим образом.
Первая и вторая приемные антенны (3,4) принимают сигналы от первой и второй орбитальных группировок навигационных спутников (1,2), например ГЛОНАСС и GPS, которые поступают в первый и второй приемники (5,6) и в виде «сырых» измерений (кодовые псевдодальности от всех видимых спутников до первой и второй приемных антенн, псевдофазы, эфемериды спутников, дополнительная информация), передаются в блок вычислений взаимного положения объектов (7), алгоритм которого содержит следующие операции:
(8) Предварительная обработка «сырых» измерений (8) от первого и второго приемников (5,6), а именно:
• синхронизация «сырых» измерений от первого и второго приемников (5,6),
• выбор актуальных одномоментных измерений для первого и второго приемников (5,6),
• выбор рабочего созвездия из одновременно видимых приемными антеннами (3 и 4) спутников GPS (j = 1, …, nGPS) и ГЛОНАСС (j = nGPS + 1,…, n);
(9) Решение навигационной задачи в геоцентрической системе координат (WGS84 или ПЗ-90) по кодовым измерениям для первого приемника (5).
В результате находятся:
• приближенные значения координат первой приемной антенны (3) { ,
,  },
},
• расхождение временных шкал первого приемника (5) от системного времени GPS – и ГЛОНАСС – ,
и ГЛОНАСС – ,
(10) Решение навигационной задачи в геоцентрической системе координат (WGS84 или ПЗ-90) по кодовым измерениям для второго приемника (6). В результате находятся:
• приближенные значения координат второй приемной антенны (4) {, },
• расхождение временных шкал второго приемника (6) от системного времени GPS – и ГЛОНАСС – ,
(11) Формирование первых разностей псевдофазовых измерений ,
j = 1, …, n с учетом влияния атмосферы, межлитерных задержек для ГЛОНАСС и другой информации, а также оценок значений дальностей  и
и  до первой и второй приемных антенн от j-го спутника, координаты которого смещены на величины, соответствующие расхождению шкал времени приемников;
до первой и второй приемных антенн от j-го спутника, координаты которого смещены на величины, соответствующие расхождению шкал времени приемников;
(12) Формирование текущего смещения координат первой приемной антенны (3) от координат {, } на l-м шаге поиска в окрестности узла (заданного стратегией поиска) для r-й поправки
 ,
,  ,
,  ,
,
где  ,
,  ,
,  – искомые r-ые поправки к координатам узла на l-м шаге поиска (для r=1 );
– искомые r-ые поправки к координатам узла на l-м шаге поиска (для r=1 );
(13) Проверка наличия «флага», сформированного в блоке 17 на втором проходе r=2 (при первом проходе «флаг» сброшен);
(14) Прибавление 0,5 цикла к разности псевдофазовых измерений в канале ГЛОНАСС на нулевой литерной частоте;
(15) Вычисление взаимных разностей между разностями псевдофазовых измерений, рассчитанными для найденных значений координат первой приемной антенны (3) на l-м шаге поиска для-й поправки, и измеренными значениями разности псевдофаз
 ;
;
(16) Анализ величины  на наличие целого числа длин волн. Если для r = 2 выполняется неравенство
на наличие целого числа длин волн. Если для r = 2 выполняется неравенство  , то требуется смещение фазы на 0,5 цикла в канале ГЛОНАСС (относительно канала GPS);
, то требуется смещение фазы на 0,5 цикла в канале ГЛОНАСС (относительно канала GPS);
(17) Формирование «флага» для выставления в блоке (13);
(18) Удаление из и целого числа длин волн (циклов фазы), которое производится вычитанием ближайшего целого числа;
(19) Формирование системы линейных уравнений для r-й поправки на l-м шаге поиска в виде
 , (3)
, (3)
где  – расстояние от фазового центра передающей антенны j-го спутника до фазового центра первой приемной антенны, вычисленное по кодовым измерениям,
– расстояние от фазового центра передающей антенны j-го спутника до фазового центра первой приемной антенны, вычисленное по кодовым измерениям,
– величины, обратные по знаку направляющим косинусам из точки {, } на j-й спутник,
– определяемые на l-м шаге поиска для r-й поправки дробные части оценки разности начальных фаз на несущей частоте GPS и нулевой литере частоты ГЛОНАСС;
 – взаимные разности (выраженные в метрах) между вычисленными значениями дробных частей разностей псевдофазовых измерений
– взаимные разности (выраженные в метрах) между вычисленными значениями дробных частей разностей псевдофазовых измерений  для найденных координат первой приемной антенны на l-м шаге поиска для -й поправки и дробными частями измеренных значений
для найденных координат первой приемной антенны на l-м шаге поиска для -й поправки и дробными частями измеренных значений  ;
;
(20) Решение МНК сформированной системы линейных уравнений и нахождение
, , 

 ;
;
(21) Анализ полученных решений сравнением с порогом:
если  ,
,  , ,
, ,
то поиск координат первой приемной антенны (3) на l-м шаге завершается и найденные величины обозначаются  ,
,  ,
, 
 ,
,  ;
;
если хотя бы одно из неравенств не выполняется, происходит переход к вычислению (r + 1)-й поправки на l шаге поиска;
(22) Подсчет числа проходов r вычисления поправок на l-м шаге поиска;
(23) Анализ текущего номера поправки (r>4?);
(24) Прекращение поиска;
(25) Введение вектора невязок и вычисление СКО невязок на l-м шаге поиска:
 = –
= –  , j = 1, …,
, j = 1, …,  для измерений GPS,
для измерений GPS,
= –  , j =
, j =  1, …,
1, …,  для измерений ГЛОНАСС,
для измерений ГЛОНАСС,
 ;
;
(26) Анализ СКО невязок на l-м шаге поиска (сравнение с априорно заданным порогом  )
)
(СКО)l < – принять найденные значения координат на шаге поиска как соответствующие искомому значению координат первой приемной антенны;
в противном случае – переход к (l+1)-му шагу поиска;
Примечание. Если для всех шагов поиска (СКО)l > , то за искомые координаты первой приемной антенны принимают координаты, соответствующие тому шагу поиска , для которого (СКО)l будет минимальным;
(27) Вычисление вектора базисной линии для координат, найденных на -м шаге поиска,
, , ;
(28) Выдача результатов потребителю.
Литература
1. А.А. Поваляев. Спутниковые радионавигационные системы: время, показания часов, формирование измерений и определение относительных координат. Москва, «Радиотехника», 2008, 324 с.
2. ГЛОНАСС. Принципы построения и функционирования/ Под редакцией А.И. Перова, В.Н. Харисова. Изд.3-е. – М.: Радиотехника, 2005 г., 688 с.
3. А.Д. Борискин, А.В. Вейцель и др. Аппаратура высокоточного позиционирования по сигналам глобальных навигационных спутниковых систем: приемники-потребители навигационной информации. Под редакцией М.И. Жодзишского. Москва, изд. МАИ-ПРИНТ, 2010 г., 210 с.
4. Сетевые спутниковые радионавигационные системы. В.С. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. Под редакцией В.С. Шебшаевича. – М.: Радио и связь, 1993 г., 408 с.
5. Ю.П. Фатеев. Разрешение фазовой неоднозначности в однобазовой угломерной аппаратуре ГЛОНАСС/GPS. Электронный журнал «Исследовано в России», 792, http://zhurnal.ape/relarn.ru/articles/2004/072.pds.
6. Патент US 5252982 «Method of precise position determination».
7. Патент RU 2157547 «Способ разрешения неоднозначности фазовых измерений».
8. Frank van Graas GNSS Augmentation for High Precision Navigation Services. AGRD-LS-207, FRANCE, 1996 г., 128-141 с.













































































Способ изготовления сквозных металлизированных микроотверстий в кремниевой подложке
Способ обработки термовидеоинформации и решающее устройство для определения температуры объекта при осуществлении способа
Способ определения повышенной сейсмической активности
Способ определения целостности высокоточных навигационных определений в реальном времени
Способ мониторинга окружающей среды и беспилотный аппарат для использования в данном способе
Способ формирования сигнала спутниковой навигационной системы
Система спутниковой связи с защитой канала удаленного управления работой
Способ и устройство фазирования и равносигнально-разностного автосопровождения неэквидистантной цифровой антенной решётки приёма широкополосных сигналов
Установка для проведения испытаний стойкости к термоударам приборов космического назначения
Способ получения и обработки изображений дистанционного зондирования земли, искажённых турбулентной атмосферой
Способ получения и обработки изображений дистанционного зондирования земли, искажённых турбулентной атмосферой
Способ изготовления сквозных металлизированных микроотверстий в кремниевой подложке
Способ обработки термовидеоинформации и решающее устройство для определения температуры объекта при осуществлении способа
Способ определения повышенной сейсмической активности
Способ определения целостности высокоточных навигационных определений в реальном времени
Способ мониторинга окружающей среды и беспилотный аппарат для использования в данном способе
Способ формирования сигнала спутниковой навигационной системы
Система управления полетом космического аппарата с применением в качестве ретрансляторов низкоорбитальных спутников, связанных между собой межспутниковыми линиями связи

