Результат интеллектуальной деятельности: Способ управления характеристикой вибрационного поля и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к области измерения, контроля и управления динамическими характеристиками вибрационных технологических машин, представляющих собою механические колебательные системы, где в качестве элементов рабочей среды выступают гранулированные сыпучие смеси.
Взаимодействие рабочей среды с вибрирующими поверхностями достаточно широко используется в технологии упрочнения поверхностей деталей (Пановко Г.Я. Динамика вибрационных технологических процессов. РХД. М.-Ижевск. 2006, 158 с., Копылов, Ю.Р. Динамика процессов виброударного упрочнения. Монография / Ю.Р. Копылов - Воронеж: ИПЦ «Научная книга», 2011. - 568 с.), например, при обработке длинномерных деталей, что характерно для конструктивных элементов летательных аппаратов и транспортных средств, особое значение приобретают вопросы формирования однородной структуры вибрационного поля, такие эффекты достигаются организацией движения рабочих органов вибростендов, когда вибрационные движения обладают определенной однородностью. Особенностью технологических процессов вибрационного упрочнения является необходимость обеспечения непрерывного подбрасывания гранулированной рабочей среды. Известен ряд решений в направлении обеспечения необходимых условий вибрационных взаимодействий.
Известен способ исследования (управления) характеристик(ами) вибрационного поля, создаваемого исполнительным органом вибрационной установки, заключающийся в их измерении (управлении ими) с помощью датчиков (возбудителей колебаний), жестко связанных с рабочей поверхностью исполнительного органа (Вибрации в технике. Справочник. В 6-ти т. / Ред. совет: В.Н. Челомей (пред.). - М.: Машиностроение, 1981. - Т. 5. Измерения и испытания. - Под ред. М.Д. Генкина. 1981. 496 с.). Недостатком известного способа является то, что он не позволяет исследовать и управлять характеристиками вибрационных режимов, использующих полезные свойства неудерживающего характера связей между гранулированной смесью и поверхностью рабочего органа технологической машины.
Известно также изобретение (ПФАЙФФЕР X., «Устройство для определения и/или контроля по меньшей мере одного параметра процесса», RU 2338164 C1, G01F 23/296, Опубл. 10.11.2008. Бюл. №31), относящееся к устройствам для определения параметров среды, представляющее собой устройство для определения и/или контроля по меньшей мере одного параметра процесса среды, с элементом, способным совершать механические колебания, который в одном направлении осуществляет механические колебания и который закреплен на зажиме, с возбуждающе/приемным элементом, который возбуждает механические колебания у элемента и который воспринимает механические колебания элемента, и с блоком регулировки/обработки результатов, который регулирует механические колебания элемента и который определяет и/или контролирует параметр процесса.
Сущность способа, используемого по данному патенту, заключается в том, что данное изобретение позволяет определить и/или контролировать по меньшей мере один параметр процесса. Вместе с тем изобретение не обеспечивает получение параметров процесса вибрационного взаимодействия рабочей гранулированной сыпучей смеси с учетом неудерживающих связей при однородном и одномерном движении рабочего органа технологической машины.
В литературе (Вибрации в технике. Справочник в 6-ти томах / Ред. совет: В.Н. Челомей (пред.). - М.: Машиностроение. 1981. Т. 4. Вибрационные процессы и машины / Под ред. Э.Э Лавенделла. 1981. - 504 с.) описаны структуры вибрационных полей, создаваемых рабочими органами вибростендов с различными требованиями к траекторным движениями точек рабочего органа. Отмечено, что структура вибрационного поля отличается неоднородностью, в связи с чем гранулированная среда не всегда взаимодействует с реализацией отскоков и последующих взаимодействий. Для контроля за структурой вибрационного поля предлагается использование традиционных средств виброизмерительной техники, что не учитывает принципиально важную особенность, заключающуюся в необходимости создания режимов непрерывного подбрасывания.
В качестве прототипа взят «Способ исследования и управления характеристиками вибрационного поля» [RU 2274843 С1, МПК G01M 7/00. Опубл. 20.04.2006. Бюл. №11]. Сущность заключается в измерении или управлении характеристиками вибрационного поля с помощью датчиков или возбудителей колебаний соответственно, которые жестко связаны с рабочей поверхностью исполнительного органа. Отличается тем, что с целью получения точного значения характеристик (или управления их величинами) вибрационного поля в любой его точке по заданным значениям параметров колебательного движения и затрачиваемой мощности для стандартных исполнительных органов виброустановок, например виброплощадок, расчетным путем определяют местонахождение точек (узлов колебаний), расположенных, в зависимости от физических свойств исполнительного органа, на его поверхности или вне этой поверхности, но жестко с нею связанных, в которых суммарное значение какого-либо характеристического параметра вибрационного поля (амплитуда, частота, кинематические характеристики линейных или угловых колебаний) равно нулю, затем относительно узлов колебаний определяют значения вибрационных характеристик в заданных точках поверхности исследуемого объекта; изменяя мощность на осуществление колебаний, меняют положение узла колебаний и таким образом вибрационную характеристику в заданной точке на поверхности исследуемого объекта; задавшись значением вибрационной характеристики в заданной точке поля, зная положение узла колебаний, определяют потребную величину расходуемой мощности.
Данный способ позволяет получить потребляемую величину расходуемой мощности. Вместе с тем способ не обеспечивает получение характеристик вибрационного поля, формируемых режимами, которые реализуют движение гранулированной сыпучей смеси в процессе однородного и одномерного движения рабочего органа технологической машины.
Задача изобретения заключается в разработке принципов построения форм реализации, оценке контроля и управления динамическим состоянием рабочих органов вибрационных технологических машин, предназначенных для упрочнения поверхностей крупногабаритных деталей в рабочей гранулированной среде, совершающей с поверхностью деталей непрерывное вибрационно-ударное взаимодействие.
Поставленная задача решается следующим образом. Способ управления характеристиками вибрационного поля включает установку датчиков на поверхности рабочего органа, фиксацию параметров вибрационного движения рабочего органа, отличается тем, что производит одновременную фиксацию сигналов с датчиков, расположенных на рабочем органе, с обязательной фиксацией измеряемого движения одной направленности, изменяя массоинерционные свойства рабочего органа путем перемещения вдоль перпендикулярных направляющих специальных перемещаемых массивных элементов (пригрузов), осуществляет управление характеристиками вибрационного поля.
Устройство для реализации способа управления характеристикой вибрационного поля включает рабочий орган, жестко соединенный с вибратором, датчики, отличается тем, что вдоль краев рабочего стола установлены пригрузы с возможностью передвижения по команде с блока управления при поступлении информации от датчиков о необходимости изменения характеристики вибрационного поля.
Сигнал с датчиков передается в блок управления, записывается, обрабатывается и используется для регулирования положения пригрузов.
Изобретение поясняется чертежами.
Краткое описание чертежей
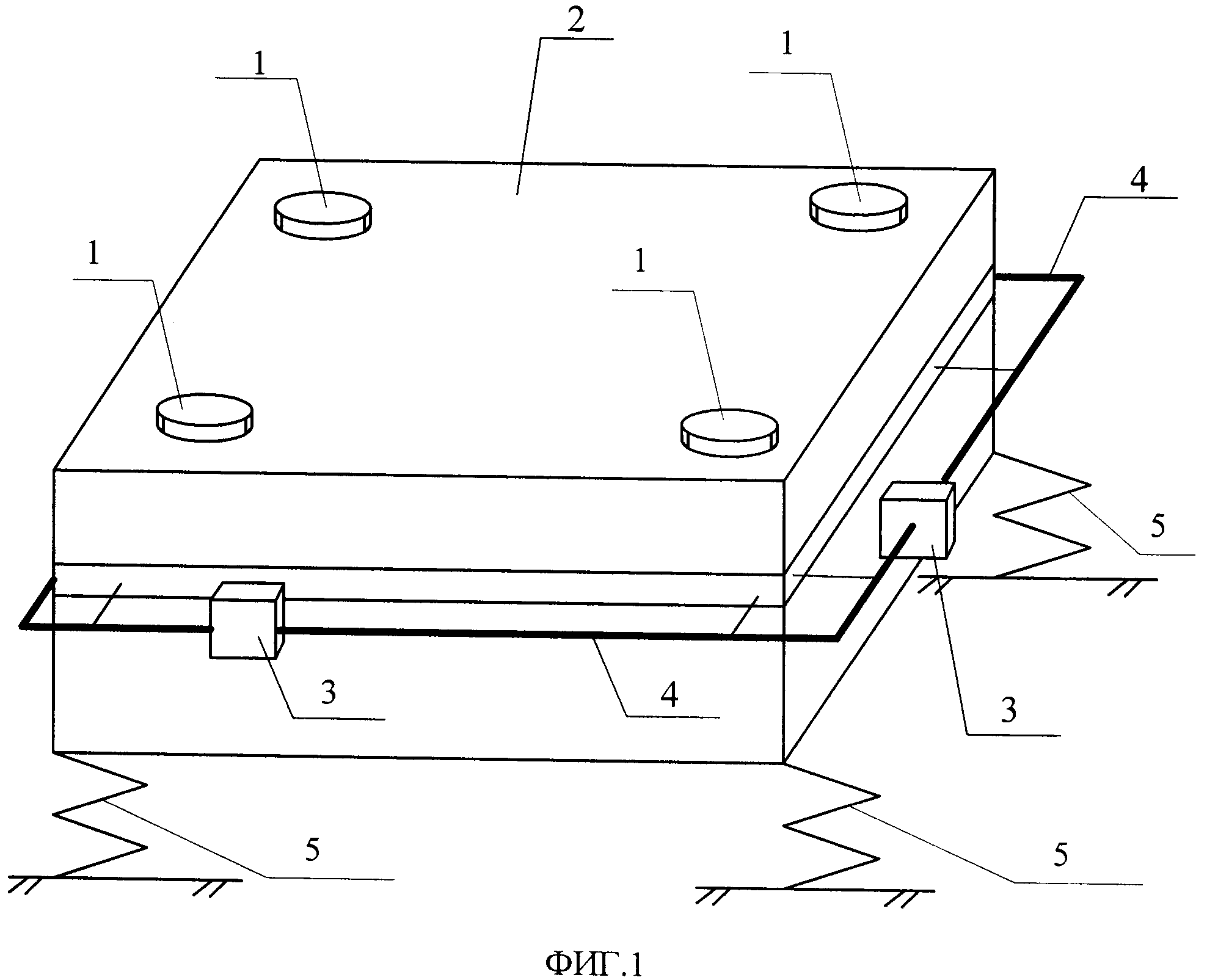
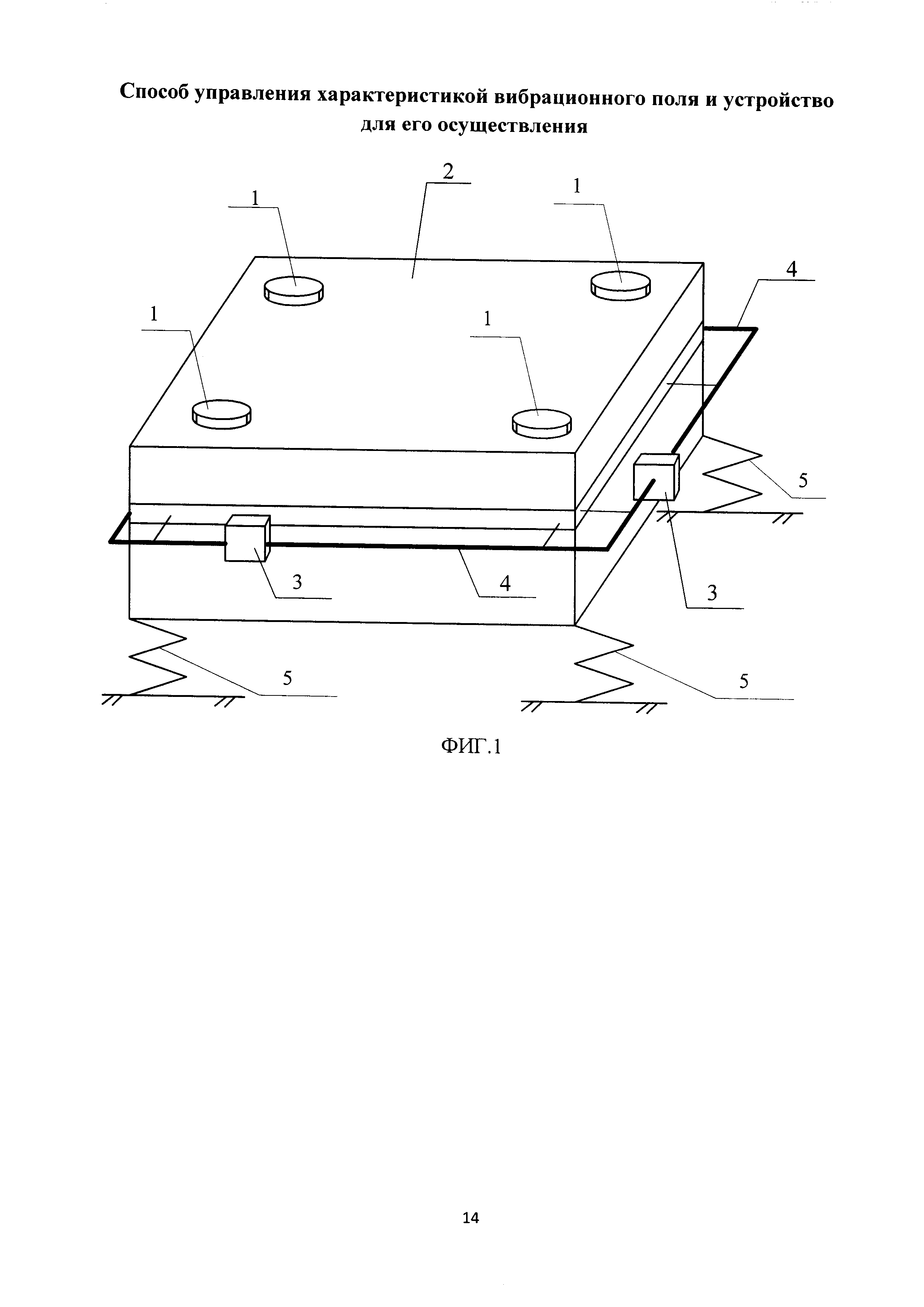
На ФИГ. 1 показана принципиальная схема вибростенда в виде твердого тела, совершающего вертикальные колебания. Рабочий орган вибростенда 2 установлен на упругие элементы 5. По углам рабочей поверхности вибрационной технологической машины установлены датчики 1. Вдоль боковых поверхностей рабочего органа вибрационной машины установлены направляющие 4 с пригрузами 3 с возможностью смещения при помощи механизмов поступательного принципа действия.
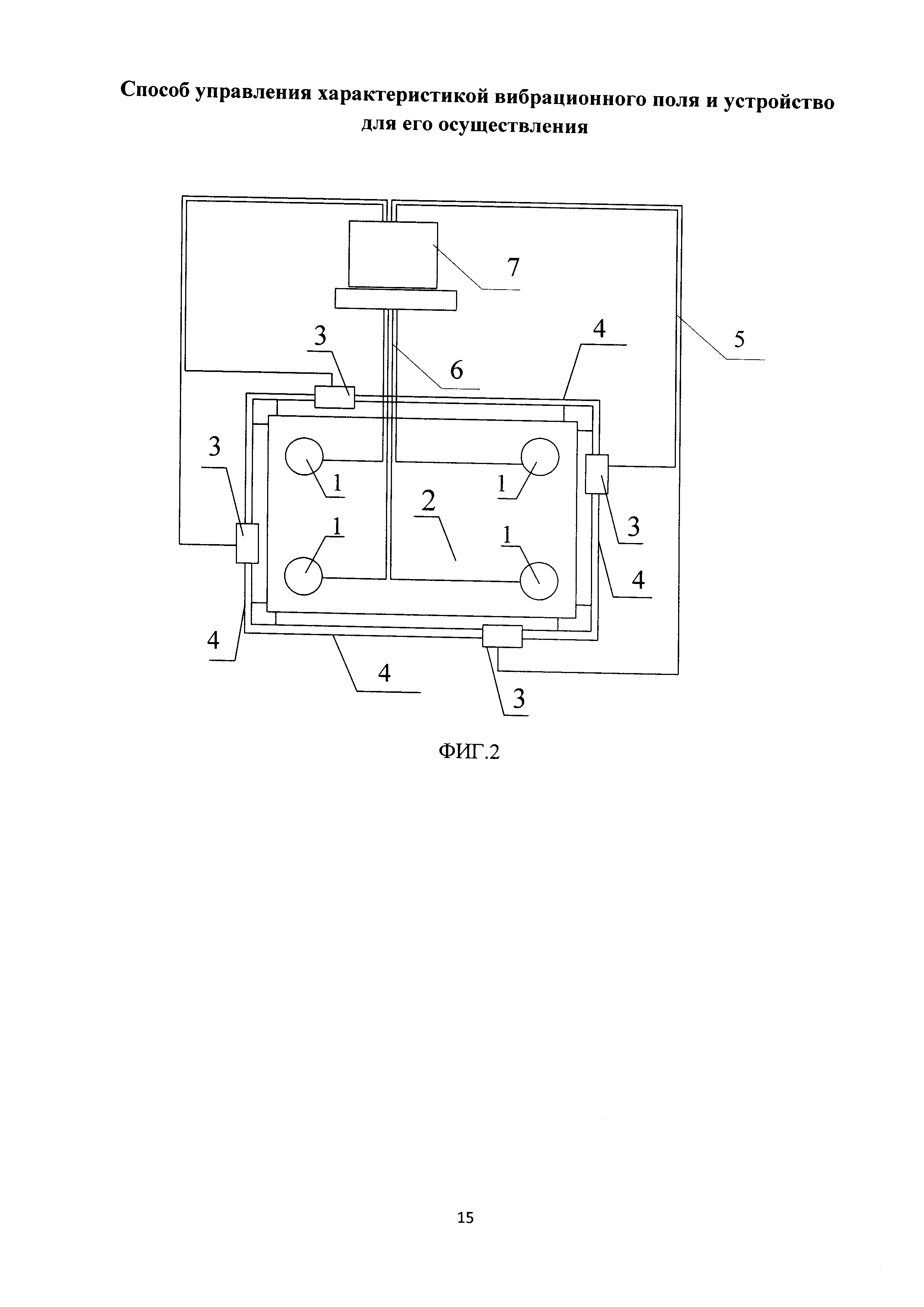
На ФИГ. 2 показана общая схема контура управления состоянием вибрационного поля. На поверхность рабочего органа вибрационного стенда 2 установлены четыре датчика 1, соединенные токовыводами 6 с блоком управления 7. На направляющих 4 установлены пригрузы 3, соединенные токовыводами 5 с блоком управления 7 и перемещающиеся посредством механизмов поступательного принципа действия вдоль направляющих 4.
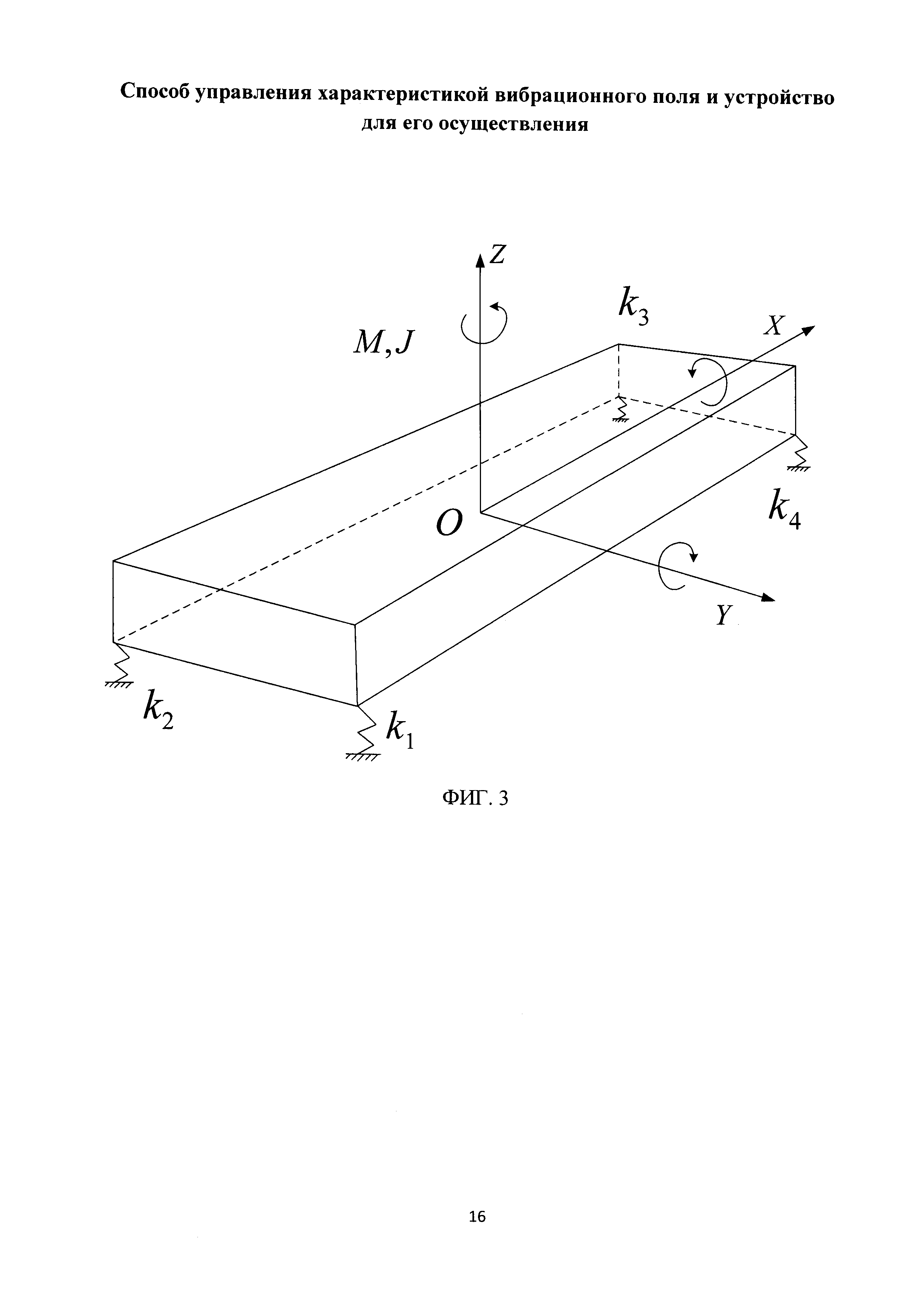
На ФИГ. 3 отражена принципиальная схема твердого тела с 6-ю степенями свободы, возбуждаемого инерционным возбудителем в вертикальном направлении и совершающего колебание на упругих элементах k1, k2, k3, k4.
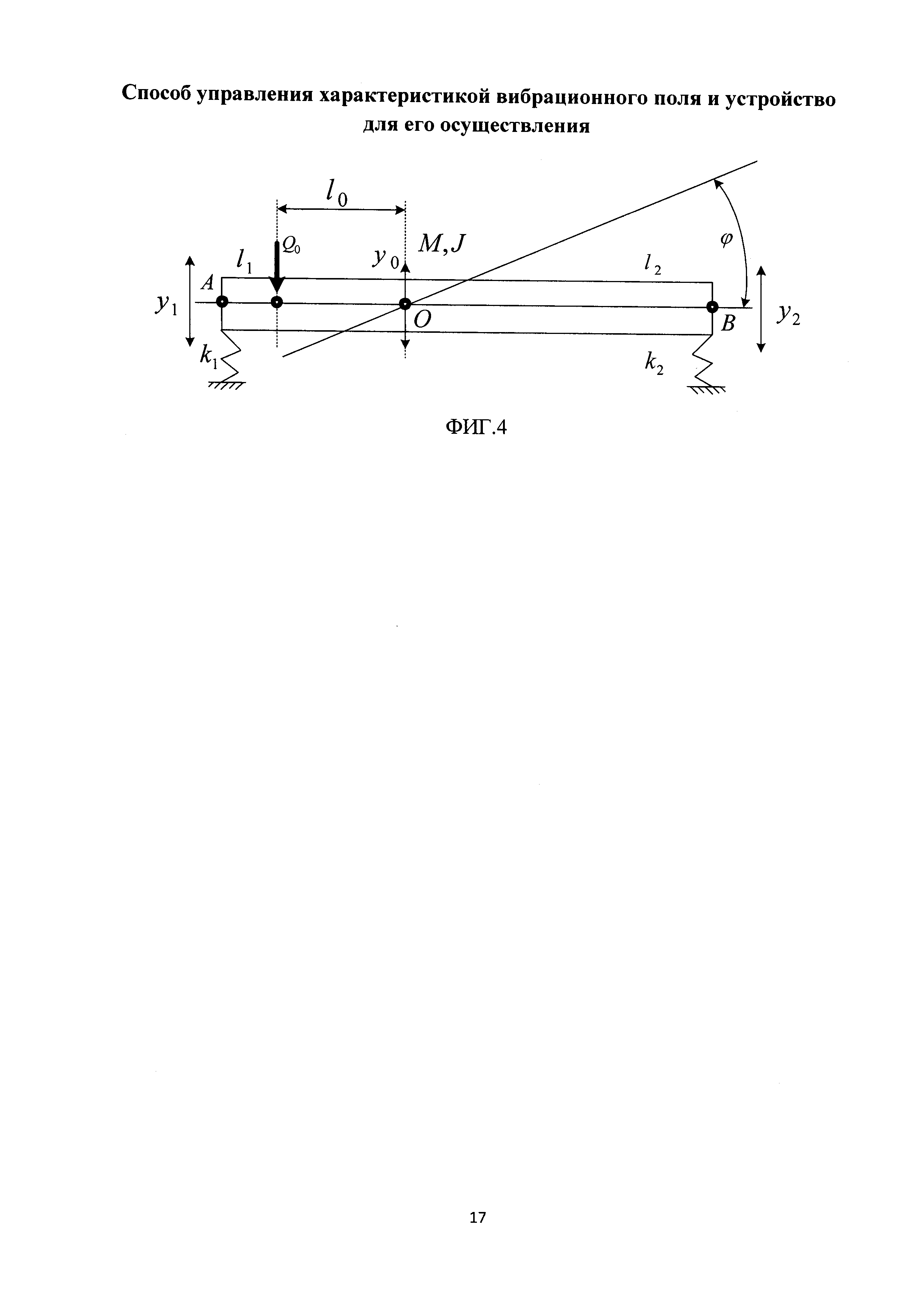
На ФИГ. 4 представлена редуцированная расчетная схема системы с двумя степенями свободы плоского колебания твердого тела с гармоническим входным воздействием Q, отражающим воздействие инерционного вибровозбудителя, установленного в соответствующей точке вибрационного стенда.
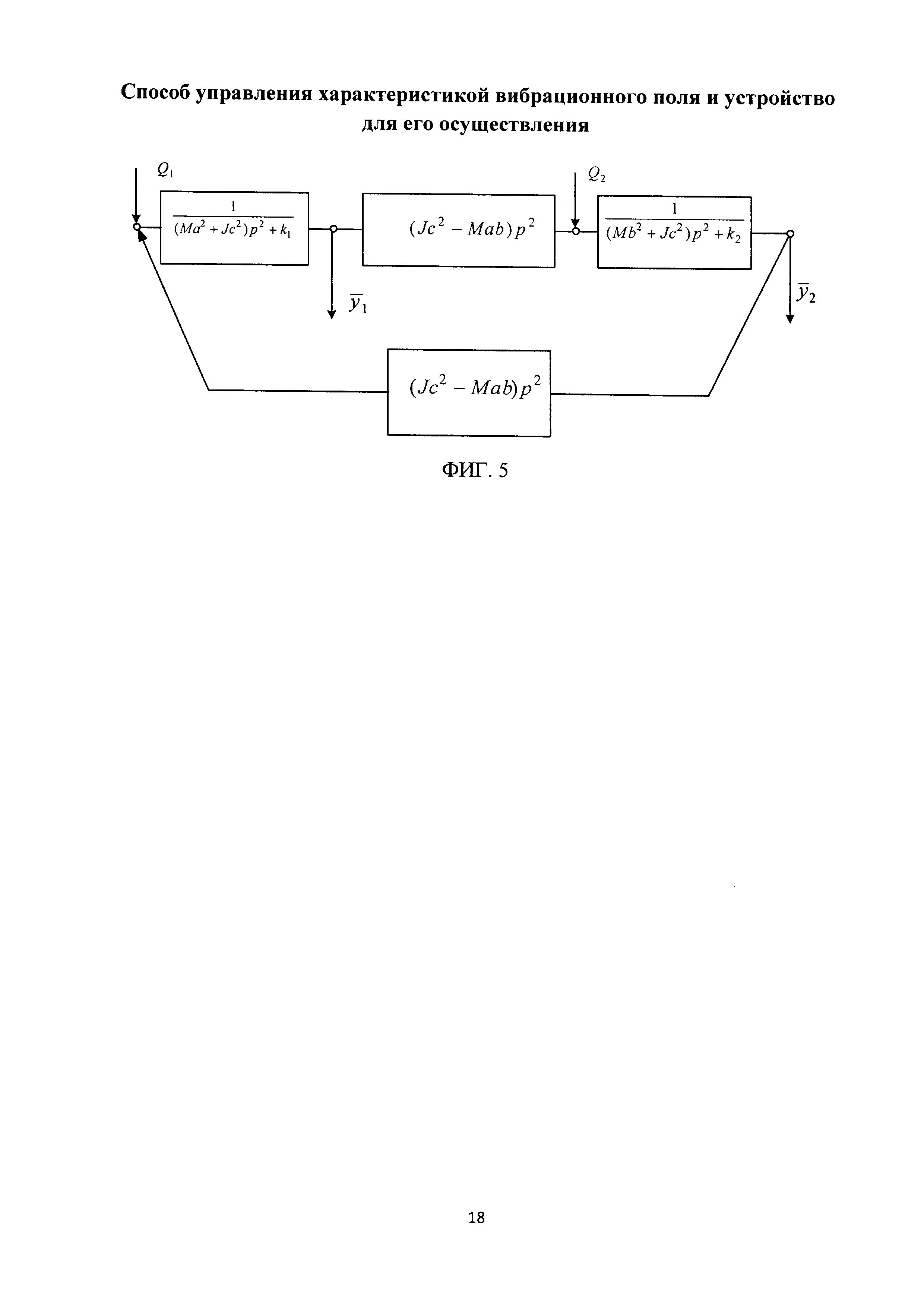
На ФИГ. 5 представлена структурная схема с выделенными парциальными системами, взаимодействующими через квазиупругие связи.
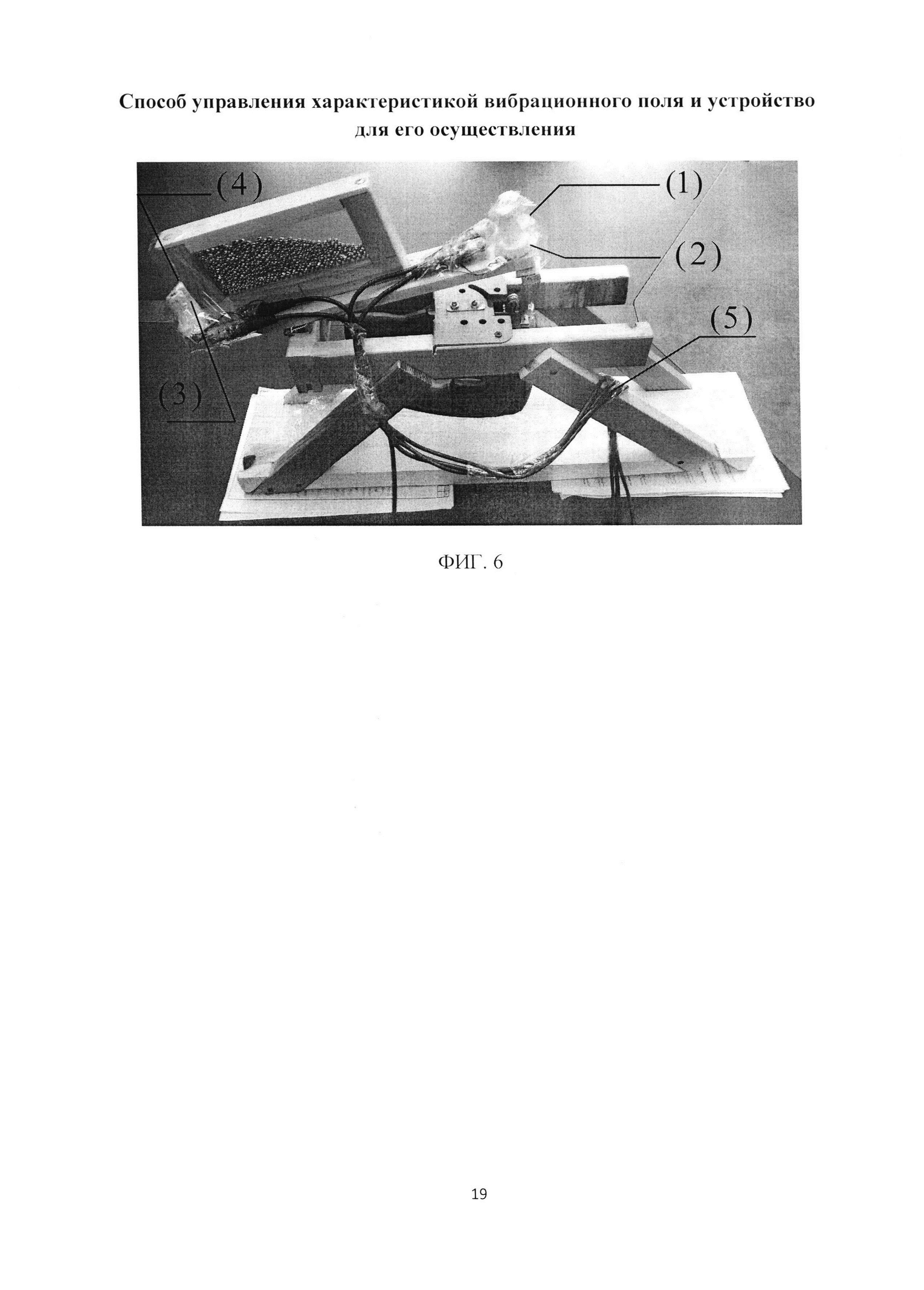
На ФИГ. 6 представлен лабораторный прототип вибрационной установки. На рабочий орган установлены датчики 1, 2, 3, 4, соединенные через токовыводы 5 с блоком управления.
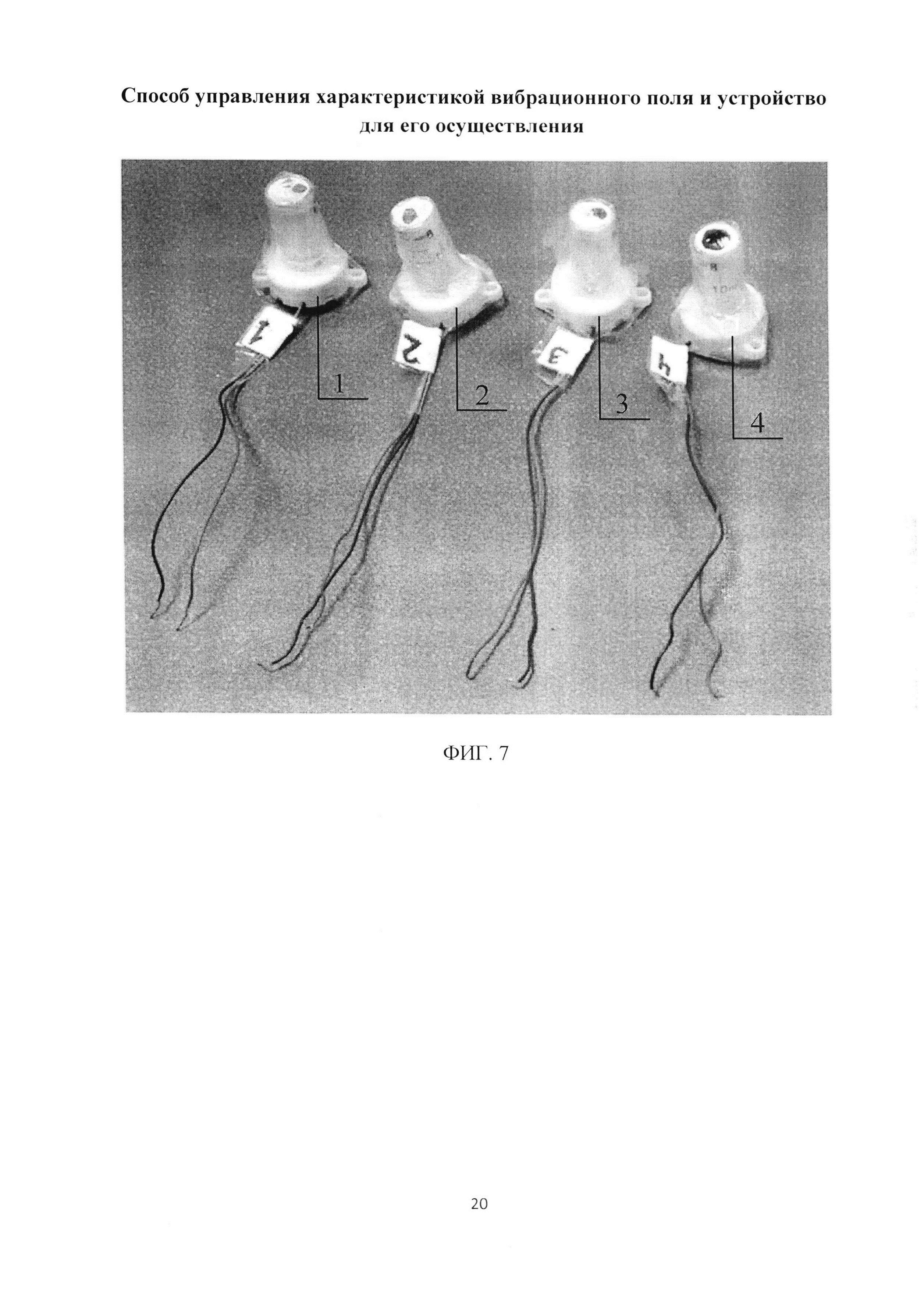
На ФИГ. 7 представлены датчики 1, 2, 3, 4 («Датчик определения граничных параметров взаимодействия тел в вибрационных системах» [Патент 148250, МПК G01P 15/09, приоритет 05.05.2014, опубликовано: 27.11.2014. Бюл. 33]).
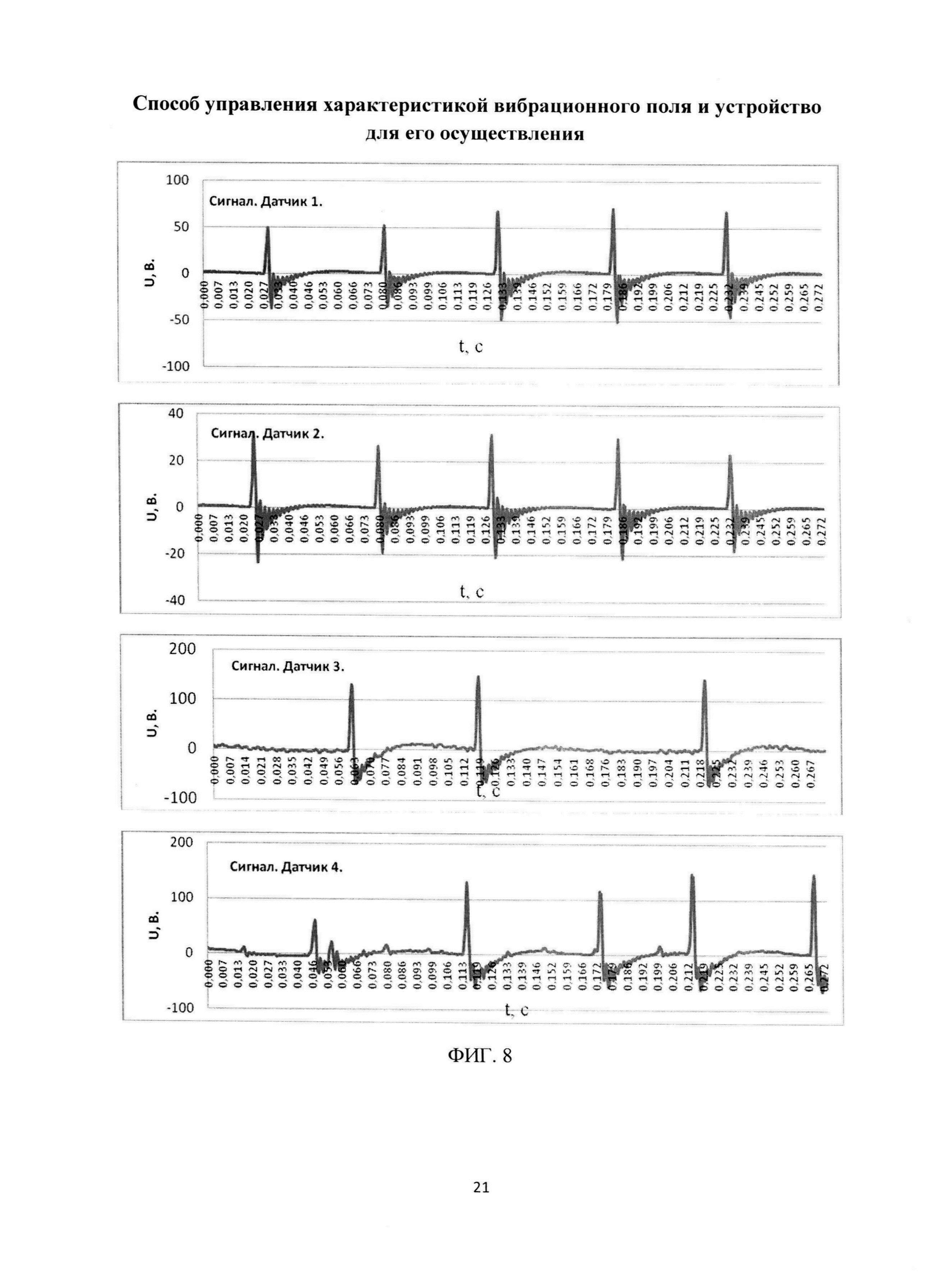
На ФИГ. 8 представлены графики результатов обработки характерных сигналов, полученных с 4-х датчиков, в процессе работы лабораторного вибростенда. Графики отражают зависимость напряжения на токовыводах датчиков от времени для четырех датчиков.
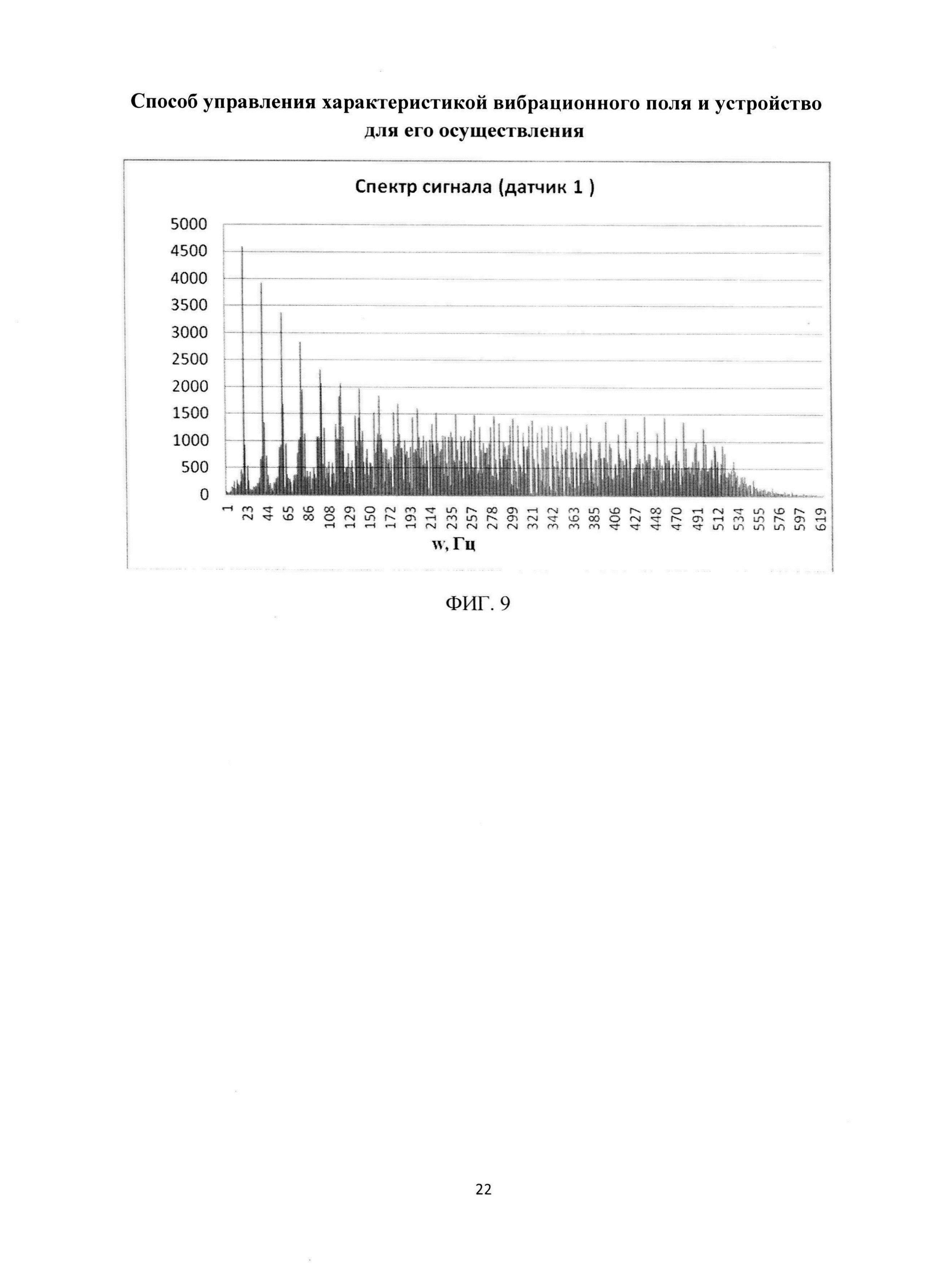
На ФИГ. 9 представлен спектр характерного сигнала с датчика 1.
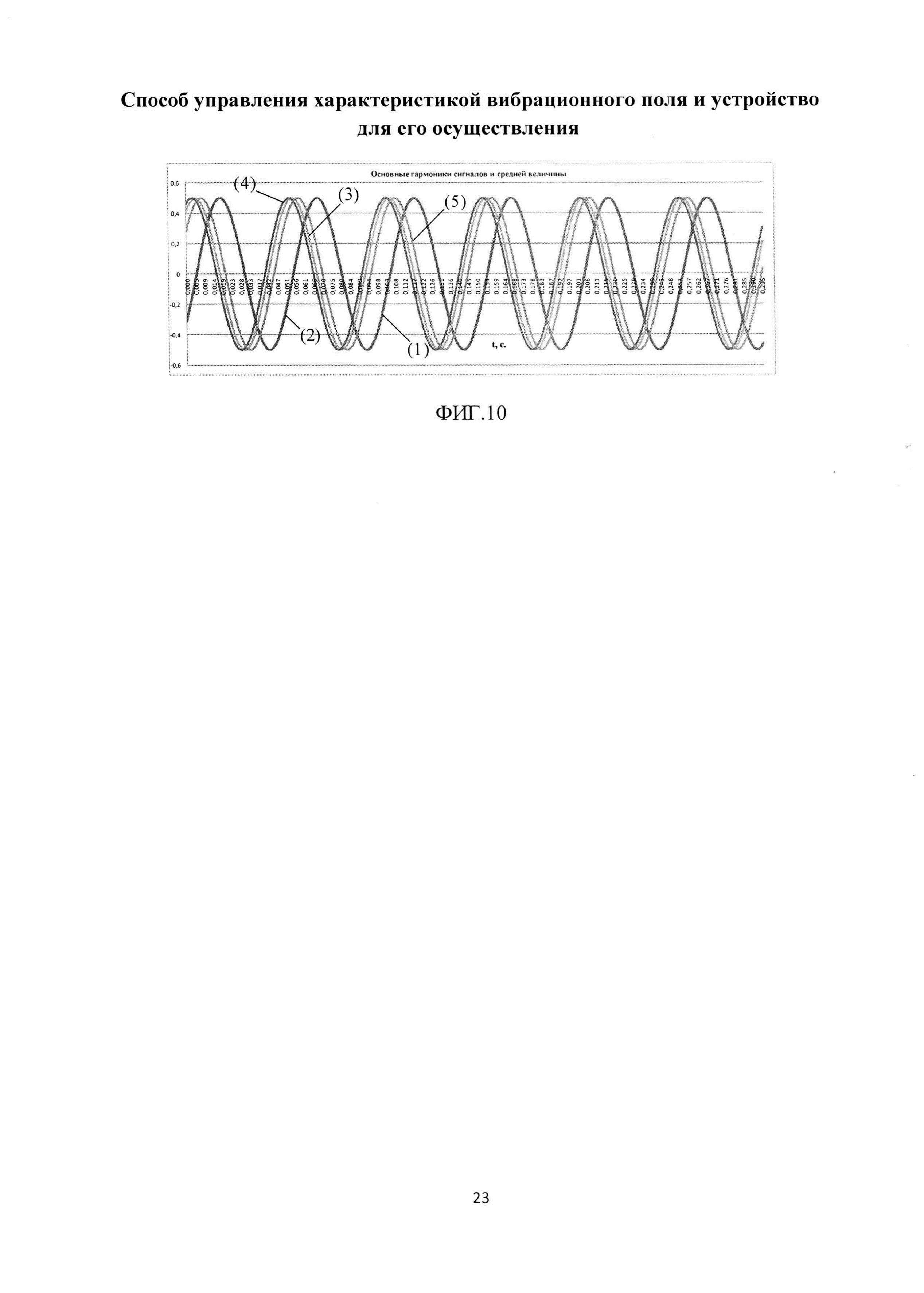
На ФИГ. 10 представлены нормированные графики 1, 2, 3, 4 основных гармоник сигналов с датчиков 1, 2, 3, 4 соответственно и основной гармоники 5 усредненного сигнала (среднеарифметическое значение четырех сигналов).
Описание принципов работы
Предлагаемый способ управления вибрационным состоянием технологического комплекса и устройство для его осуществления заключаются в том, что на рабочий орган вибростенда устанавливается одновременно 4 датчика, схема расположения которых учитывает особенности колебания рабочего органа как твердого тела, совершающего при гармоническом возбуждении сложное колебательное движение. Способ оценки структуры вибрационного поля ориентирован на измерение вертикальных компонент скоростей, перемещений и ускорений одновременно с записью на соответствующий носитель информации, позволяющий определить распределение амплитуд перемещений, скоростей и ускорений. При этом полагается, что однородность вертикального движения рабочего органа вибростенда предварительно обеспечивается соответствующими ограничителями движения и возможностями осуществлять настройку путем выдерживания определенных соотношений по параметрам движения в других направлениях, кроме вертикального.
Если движение носит однородный характер, то амплитуды колебаний сигналов по выбранным точкам будут иметь один и тот же знак, и текущие амплитуды или фазы колебаний будут незначительно отличаться от среднеквадратичного или среднеарифметического значения. Если доля движений твердого тела по различным координатам будет завышена, то сигналы будут иметь значительный разброс, что дает возможность своевременно приступить к корректировке вибрационного поля.
На ФИГ. 1 показана принципиальная схема вибростенда в виде твердого тела, совершающего вертикальные колебания, возбуждаемого инерционным устройством (к примеру, инерционным возбудителем). Установка датчиков обозначена позициями 1.
На ФИГ. 2 представлена общая схема регистрации сигналов с датчиков. Измеряемый сигнал поступает в блок управления, обрабатывается для вычисления среднеарифметического или среднеквадратичного значения амплитуд колебания и отклонения от средних параметров. Отдельно выводится информация о знаках скоростей и перемещений по выбранным точкам, определяются фазы гармонического разложения сигналов.
Теоретическое обоснование способа контроля и оценки структуры вибрационного поля (управление состоянием)
На ФИГ. 3 показана принципиальная схема твердого тела с 6-ю степенями свободы, возбуждаемого инерционным возбудителем в вертикальном направлении.
Математическая модель колебания твердого тела может быть представлена системой дифференциальных уравнений движения по координатам точек. Для упрощения исходной модели условия развязки колебаний при заданных условиях вибрационных колебаний могут быть обеспечены введением специальных ограничителей на отдельные виды движений, а также путем соблюдения определенных отношений симметричности инерционных свойств. Введение ограничителей на движения вдоль осей ОХ и OY приводит к том, что система будет колебаться только в вертикальном направлении.
На ФИГ. 4 приведена редуцированная расчетная схема системы с двумя степенями свободы плоского колебания твердого тела с гармоническим входным воздействием Q, отображающим воздействие инерционного вибровозбудителя, установленного в соответствующей точке вибрационного стенда.
Элементами расчетной схемы на ФИГ. 4 является твердое тело (рабочий орган), опирающееся в точках А, В на упругие элементы с жесткостями k1, k2 соответственно. Предполагается, что центр тяжести находится в точке О, расположенной на отрезке А и В.
Гармоническое силовое возмущение  приложено в точке на расстоянии
приложено в точке на расстоянии  от точки О. Система совершает малые колебания относительно положения статического равновесия, силы трения предполагаются малыми. Рассматриваются одновременно две неподвижные системы обобщенных координат относительно положения статического равновесия твердого тела. Обобщенные координаты {у1,у2} определяют смещение точек А, В, {у0,ϕ} - определяют смещение центра тяжести по вертикали и угол поворота.
от точки О. Система совершает малые колебания относительно положения статического равновесия, силы трения предполагаются малыми. Рассматриваются одновременно две неподвижные системы обобщенных координат относительно положения статического равновесия твердого тела. Обобщенные координаты {у1,у2} определяют смещение точек А, В, {у0,ϕ} - определяют смещение центра тяжести по вертикали и угол поворота.
С учетом предположений обобщенные координаты двух неподвижных систем отсчета y1, y2 и y0, ϕ связаны соотношениями:
 и
и  , где
, где  ,
,  ,
,  .
.
В соответствии с формализмом Лагранжа составляется система дифференциальных уравнений, которая после преобразования Лапласа может быть трансформирована в структурную математическую модель. Структурная схема с выделенными парциальными системами, взаимодействующими через квазиупругие связи, представлена на ФИГ. 5.
Условия однородности вибрационного поля соотносятся с представлением о том, что при заданных внешних возмущениях отношение выходных сигналов на парциальных системах будет равно единице:

Разрешение уравнения (1) относительно p=iω позволяет определить частоту внешнего воздействия  , обеспечивающую однородную структуру вибрационного поля в зависимости от параметров вводимого устройства и приложенной силы:
, обеспечивающую однородную структуру вибрационного поля в зависимости от параметров вводимого устройства и приложенной силы:

На частоте изображения  и
и  равны между собой и составляют величину:
равны между собой и составляют величину:

С учетом аналитических особенностей выражения (3) решение существует и не равно нулю, если выполнены условия:

Частота режима однородного движения твердого тела реализуется, если для величины смещения  точки приложения силы
точки приложения силы  от центра тяжести с выполнено условие:
от центра тяжести с выполнено условие:

Таким образом, условия (5) обеспечивают существование  - частоты однородного вибрационного поля. Частота определяется массоинерционными характеристиками колебательной системы, которые могут быть изменены, в частности, посредством изменения положения центра тяжести (с помощью перемещения пригрузов).
- частоты однородного вибрационного поля. Частота определяется массоинерционными характеристиками колебательной системы, которые могут быть изменены, в частности, посредством изменения положения центра тяжести (с помощью перемещения пригрузов).
Для оценки и контроля структуры вибрационного поля синхронно фиксируются сигналы с четырех датчиков, установленных в углах рабочего органа вибрационной технологической машины, и определяется среднее значение амплитуд колебания сигналов:
АСР=(А1+А2+А3+А4)/4.
При одномерном и однородном колебании рабочей поверхности будет выполняться совпадение амплитуд колебания А1=А2=А3=А4. Если амплитуды колебаний не равны, это означает наличие угловых вибраций. Величина этих угловых движений может быть отрегулирована с помощью установки на рабочем органе пригрузов, после чего технологический процесс реализуется в режиме одномерного и однородного колебания.
Регулирующее устройство представляет собой систему жестких балок с расположенными на них пригрузами. На ФИГ. 1 и ФИГ. 2 пригрузы 3 могут передвигаться вдоль направляющих 4, используя механизм поступательного принципа действия (примером служит суппорт токарного станка, перемещаемый с помощью ходового винта). Схема представлена на ФИГ. 1 - изометрическая проекция.
Настройка работы вибростенда осуществляется в начале технологического процесса и может осуществляться автоматически на основе информации, полученной с установленных датчиков 1.
В рамках предлагаемого изобретения способ реализуется устройством, состоящим из массоинерционных элементов 3 (ФИГ. 1), которые могут перемещаться вдоль направляющих 4, параллельных поперечной и продольной осям рабочего органа, на достаточно больших расстояниях от центра масс системы при наличии соответствующих ограничителей, обеспечивающих возможность движения по вертикальной оси рабочего органа вибрационной машины.
Предварительная оценка возможностей реализации
В качестве примера применения способа управления характеристикой вибрационного поля и устройства для его осуществления в вибрационных системах следует привести технологический вибрационный процесс виброупрочнения лонжерона лопасти вертолета посредством рабочей среды, образованной большим количеством стальных шариков, в основе которого лежит теория взаимодействия материальной частицы с вибрирующей поверхностью [Вибрации в технике. Справочник в 6-ти томах / Ред. совет: В.Н. Челомей (пред.). - М.: Машиностроение. 1981. Т. 4. Вибрационные процессы и машины. / Под ред. Э.Э Лавенделла. 1981. - 504 с., стр. 13] для случая горизонтальной поверхности, совершающей вертикальные колебания. Машина образована тремя вибрационными секциями, помещенными на упругие элементы, на которые сверху помещаются лонжероны лопастей вертолетов в контейнерах, внутрь которых засыпаны стальные металлические шарики. Такая технологическая машина может иметь возможность регулирования амплитуды и частоты колебания опорной поверхности вибрирующих секций. Из-за разбалансировки и износа элементов вибрационной машины амплитуды колебания точек вибрационного поля могут перестать соответствовать допустимым значениям в частности и может произойти нарушение однородности вибрационного поля каждой секции вибрационного стенда. Для первичной настройки режима виброупрочнения необходима оценка однородности вибрационного поля каждой из трех секций. Установка датчиков на технологическую опорную поверхность колебания и определение отклонений сигналов по четырем датчикам от среднего значения для различных положений точечных грузов вдоль направляющих позволяет провести предварительную оценку структуры вибрационного поля технологической машины в зависимости от массоинерционных характеристик рабочего органа секции вибростенда и произвести регулировку структуры вибрационного поля. Если при определенных положениях пригрузов усредненный сигнал имеет малые отклонения от сигналов с четырех датчиков, то считается, что регулирование структуры вибрационного поля произведено и достигнута однородная структура вибрационного поля секции технологической машины.
Техническая применимость способа управления характеристикой вибрационного поля и устройства для его осуществления в вибрационных системах может быть обоснована теоретическими результатами и модельным экспериментом. При рассмотрении механической колебательной системы с внешним силовым гармоническим возмущением, приложенным к определенной точке твердого тела, существуют массоинерционные параметры системы, обеспечивающие однородность вибрационного поля.
Таким образом можно полагать, что в случае нарушения однородной структуры вибрационного поля существуют такие массоинерционные параметры механической колебательной системы, при достижении которых структура вибрационного поля становится близка к однородной.
Для подтверждения возможности получения технического результата представлен экспериментальный прототип виброустановки и проведено сравнение четырех сигналов датчиков со средней величиной, характеризующее неоднородность структуры вибрационного поля на основе различия фазовых сдвигов сигналов гармоник основной частоты.
Для регистрации структуры вибрационного поля четыре датчика 1, 2, 3, 4 (ФИГ. 6) жестко крепятся к рабочей поверхности вибрационной машины.
Сигналы с датчиков 1, 2, 3, 4 (ФИГ. 6) через токовыводы 5 поступают в блок управления. В блоке управления сигнал обрабатывается и представляется в виде графиков напряжений на токовыводах датчиков в зависимости от времени (ФИГ. 8) и графиков спектрального представления (ФИГ. 9). Все графики напряжений (ФИГ. 8) имеют характерные всплески, отражающие периодические моменты удара рабочей среды.
На основе спектрального представления сигналов определяется основная частота, которая совпадает для всех четырех сигналов. Для каждого сигнала определяется фаза основной гармоники. Полученные гармоники нормируются 1, 2, 3, 4 (ФИГ. 10) и сравниваются с основной нормированной гармоникой усредненного сигнала 5.
Таким образом, на основании различия фаз нормированных гармоник и сравнении с фазами усредненного сигнала делается вывод о степени близости структуры вибрационного поля к однородной.
Так, в соответствии с ФИГ. 10 среднее абсолютное отклонение фаз сигналов 1, 2, 3, 4 от фазы усредненного сигнала 5 превышает  рад, что свидетельствует о сильной неоднородности вибрационного поля и является основанием для принятия мер по коррекции структуры вибрационного поля.
рад, что свидетельствует о сильной неоднородности вибрационного поля и является основанием для принятия мер по коррекции структуры вибрационного поля.
Полезность способа управления характеристикой вибрационного поля и устройства для его осуществления в вибрационных системах заключается в возможности оценки неоднородности структуры вибрационного поля в режиме подбрасывания сыпучих материалов, и как следствие, в возможности контроля, настройки и регулирования режимов работы технологических линий вибрационных машин.
Эффективность заключается в большей простоте, надежности и возможности способа управления характеристикой вибрационного поля и устройства для его осуществления идентифицировать неоднородную структуру вибрационного поля в режиме виброподбрасывания в точках опорной поверхности вибрационной машины.
Работоспособность подтверждается теоретическими результатами и практическими данными, полученными при проведении лабораторных экспериментов с опытными образцами.
Адаптивная система помощи при движении задним ходом автомобиля с прицепом
Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления
Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации

