Результат интеллектуальной деятельности: СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к области гибридной навигации, в частности к способам определения местоположения на основе комплексирования информации от различных источников.
Известно устройство (способ) определения местоположения на основе системы счисления пути, определителя курса и одной или нескольких фиксированных радиостанций с известными координатами [1]. Вычисление позиции основано на определении углов прихода радиоволн от одной или нескольких фиксированных радиостанций в разных точках маршрута движения с учетом траектории пройденного пути между ними посредством системы счисления пути и определителя курса (но сути инерциальной навигационной системы (ИНС)). Недостаток данного способа заключается в необходимости определения углов прихода радиоволн, что требует сложной антенной системы и может приводить к грубым ошибкам даже на слабопересеченной местности из-за эффекта многолучевости. Кроме того, точность данного способа ухудшается на больших дальностях от фиксированных радиостанций (вследствие угломерного метода). Также для определенных диапазонов частот фазированная антенная решетка (или т.п. антенная система) достаточно громоздкая и не всегда подходит для установки на малые мобильные объекты.
Известна система (способ) определения местоположения на основе GPS приемника, инерциальной навигационной системы и высотомера [2]. Вычисление позиции основано на использовании GPS и высотометре в случае, если есть прием навигационных радиосигналов не менее чем от трех спутников. В случае отсутствия видимости спутников GPS позиция определяется на основе инерциальной навигации. В случае видимости одного или двух спутников (например, в условиях городской местности) позиция находится на основе определения дальности до спутника и его координат в двух точках маршрута посредством декодирования навигационной информации из спутникового навигационного радиосигнала. Далее на основе решения двух треугольников и вычислении углов направления на спутник в двух точках маршрута, получается система из двух соответствующих уравнений кривых, решение которой позволяет определить текущую позицию объекта. Недостаток данного способа (системы) заключается в определении дальности до спутника, которая находится на основе задержки распространения сигнала, определяемой посредством вычитания сдвига времени данного спутника (полученное декодированием навигационного сообщения) из разности фазы навигационного радиосигнала, которая была измерена заранее. Таким образом, определение позиции зависит от заранее измеренной разности фаз, что не позволяет определять позицию объекта независимо от предыдущих данных. Кроме того, в данном способе подразумевается, что часы мобильного объекта и атомные часы спутника заранее синхронизированы, что опять же требует априорного решения навигационной задачи с тремя и более спутниками GPS или какого-нибудь отдельного канала синхронизации. Помимо этого, данная система (способ) основана на приеме сигналов GPS, которые достаточно уязвимы к действию преднамеренных помех, вследствие малого уровня мощности на поверхности Земли и в атмосфере, а также известностью рабочего диапазона частот.
Известен метод и система позиционирования на основе беспроводной радиосвязи и напряженности (силы) геомагнитного поля [3]. Вычисление позиции основано на измерении дальности между опорной базовой станцией и мобильным объектом и сопоставлении измеренной напряженности (силы) геомагнитного поля с имеющейся базой данных напряженностей (силы) геомагнитного поля. Далее на основе пересечения изомагнитной линии и окружности (сферы) с радиусом, равным измеренной дальности до базовой станции, определяется местоположение мобильного объекта. Недостатком данного метода и системы является необходимость в априорном наличии актуальной базы данных напряженностей (силы) геомагнитного поля в заданном районе, что не всегда возможно, особенно в условиях оперативного применения.
Известна радионавигационная система (способ) позиционирования мобильных объектов на основе определения не менее трех дальностей до опорной станции не менее чем в трех точках траектории движения с учетом информации о векторе скорости (ее производных) в первой точке [4]. Вычисление позиции основано на решении системы нелинейных уравнений дальностей, где координаты второй, третьей и т.д. точек маршрута выражены через координаты первой точки посредством скорости (ее производных) и интервала времени. Данный способ (система) является наиболее близким аналогом (прототипом) к предлагаемому.
Признаки прототипа, являющиеся общими с заявляемым изобретением, включают определение дальностей до опорной радиостанции в более чем одной точке траектории движения, вычисление местоположения на основе решения системы нелинейных уравнений, наличие приемопередатчика радиосигналов.
Недостатком данного способа является требование постоянства вектора скорости (ее производных) мобильного объекта на всей траектории движения, т.е. постоянство формы траектории между всеми парами смежных точек. Также для определения местоположения в пространстве необходимо измерение не менее трех дальностей до опорной радиостанции в трех точках пути. Кроме этого, в прототипе не рассмотрен вопрос работы в пассивном режиме (т.е. когда излучает только опорная радиостанция) и определяются разности дальностей (а не дальности) до опорной радиостанции. Таким образом, требования постоянства вектора скорости (ее производных) на всей траектории движения и временного интервала между не менее чем тремя точками с практической точки зрения представляются сложно исполнимыми и ведут к существенным ограничениям в условиях реального применения.
Технический результат заключается в обеспечении возможности определения пространственных координат мобильного объекта с помощью сигналов одной опорной радиостанции и счисления пути.
Указанный технический результат достигается благодаря тому, что способ динамического определения местоположения мобильных объектов, включающий:
- определение дальностей или разностей дальностей до опорной радиостанции в различных точках траектории движения;
- определение длины, азимута и угла места отрезков, последовательно соединяющих точки траектории движения;
- определение пространственных координат точек траектории движения на основе решения системы нелинейных уравнений;
имеет следующие отличия:
- применение как дальностей, так и разностей дальностей до опорной радиостанции для решения навигационной задачи;
- определение минимум двух дальностей или разностей дальностей до опорной радиостанции в двух или трех точках траектории движения соответственно;
- определение на основе счисления пути относительных координат последующих точек траектории движения относительно первой для формирования отрезков;
- определение длины, азимута и угла места отрезков, последовательно соединяющих точки траектории движения;
- произвольность формы траектории движения между всеми парами смежных точек, так как учитываются только отрезки, соединяющие выбранные смежные точки траектории движения, а определение относительных пространственных координат текущей точки относительно предыдущей для формирования отрезка основано на счислении пути.
Предлагаемый способ представлен двумя вариантами, а именно:
1) Дальномерный (или активный) вариант, при котором оцениваются две дальности до опорной радиостанции в двух точках траектории движения на основе метода «запрос-ответ» (TW-TOA [5]) или оценки мощности принятого радиосигнала (RSSI [5]).
2) Разностно-дальномерный (или пассивный) вариант, при котором оцениваются две разности дальностей до опорной радиостанции в трех точках траектории движения на основе фиксации моментов приема навигационного радиосигнала в шкале времени мобильного объекта.
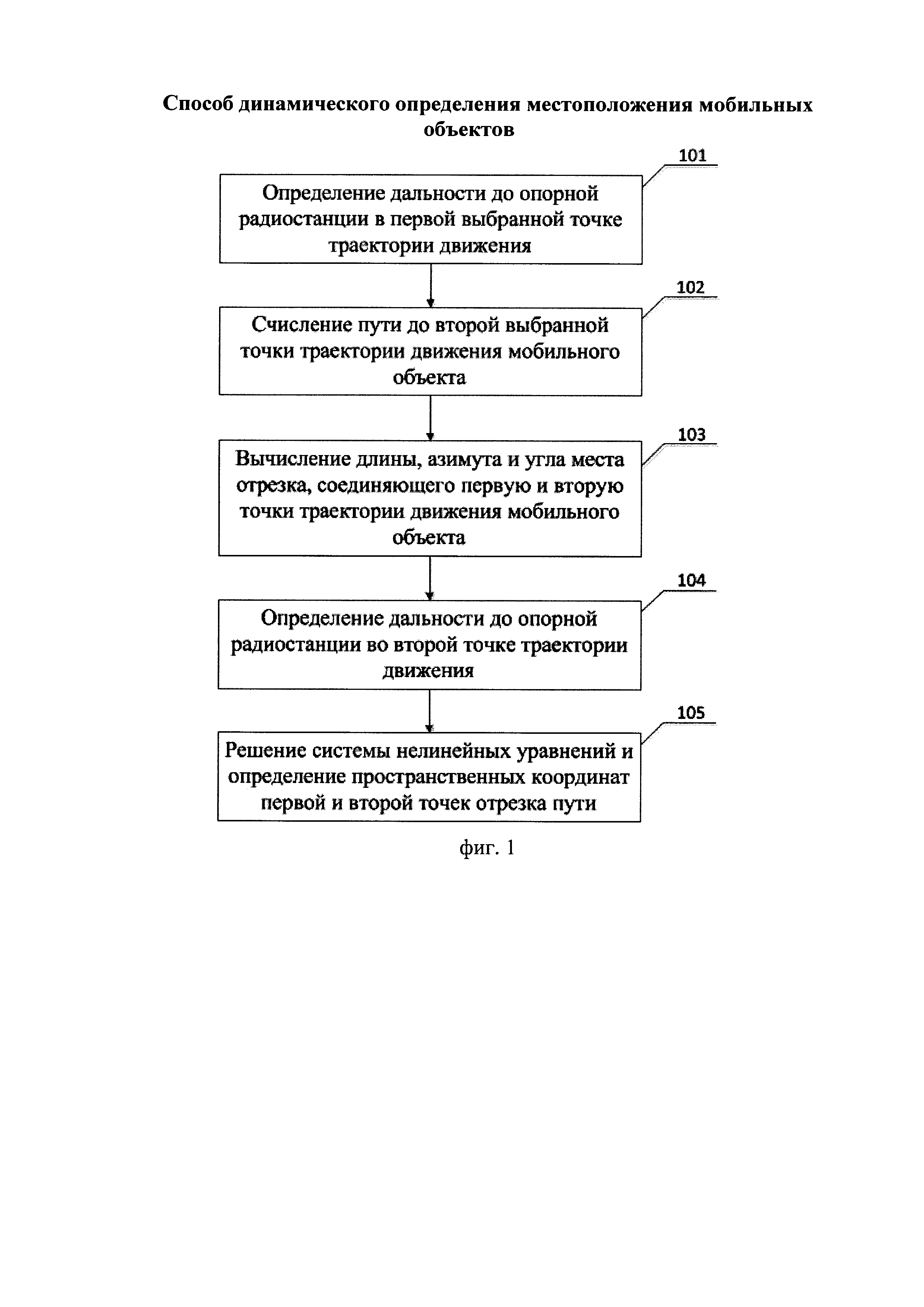
Представленный на фиг. 1 дальномерный (активный) вариант предлагаемого способа включает следующие этапы:
1. Определение дальности до опорной радиостанции в первой выбранной точке траектории движения 101.
2. Счисление пути до второй выбранной точки траектории движения мобильного объекта 102.
3. Вычисление длины, азимута и угла места отрезка, соединяющего первую и вторую точки траектории движения мобильного объекта 103.
4. Определение дальности до опорной радиостанции во второй точке траектории движения 104.
5. Решение системы нелинейных уравнений и определение пространственных координат первой и второй точек отрезка пути 105.
Как показано на фиг. 2, динамическое определение местоположения мобильных объектов для дальномерного (активного) варианта предлагаемого способа основано на измерении минимум двух дальностей R1 и R2 между одной опорной радиостанцией (с известными координатами X0, Y0, Z0) и мобильным объектом в двух точках (с неизвестными координатами X1, Y1, Z1 и X2, Y2, Z2) траектории движения Р, определения длины L, азимута β и угла места α отрезка S, соединяющего первую и вторую точки траектории движения мобильного объекта (здесь S' и Р' - соответствующие проекции отрезка S и траектории движения Р на плоскость OXY).
Определение местоположения мобильного объекта основано на вычислении пространственных координат двух точек отрезка S посредством решения системы нелинейных уравнений (1).
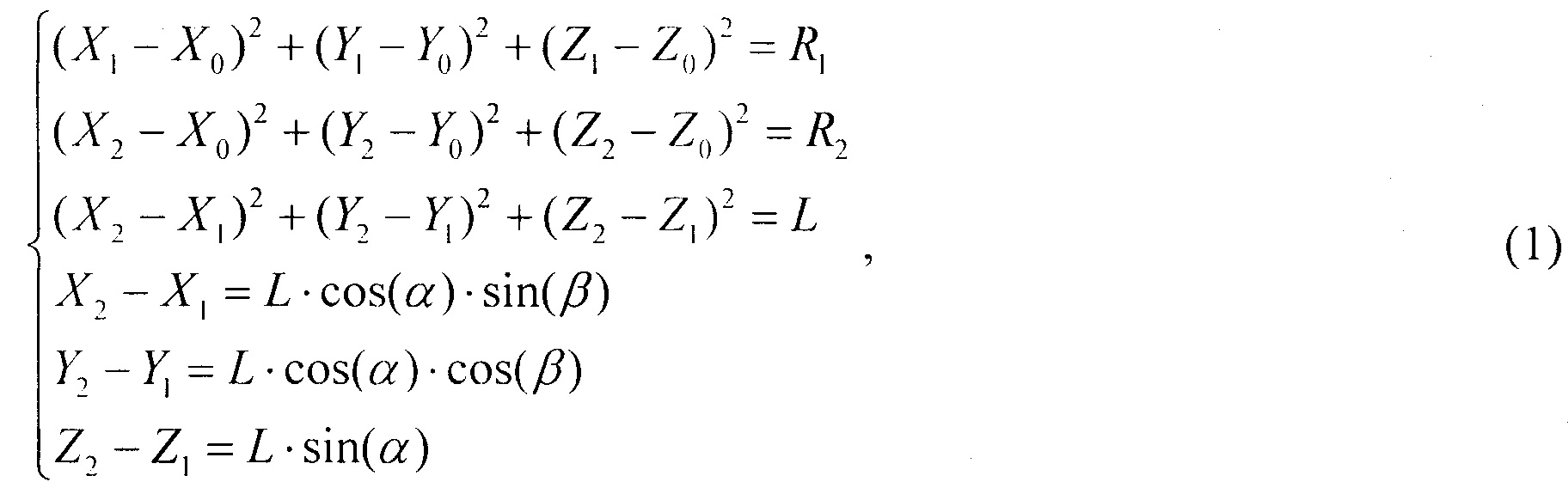
где (X1, Y1, Z1) и (X2, Y2, Z2) - искомые координаты первой и второй точек траектории движения мобильного объекта.
Решение системы нелинейных уравнений (1) основано, как правило, на итерационной процедуре (например, методом Левенберга-Марквардта [6]), с учетом исключения зеркальных (неоднозначных) решений посредством сравнения дальностей до первой и второй точек отрезка пути (т.е. R2>R1 или R2-R1) при условии R2≠R1.
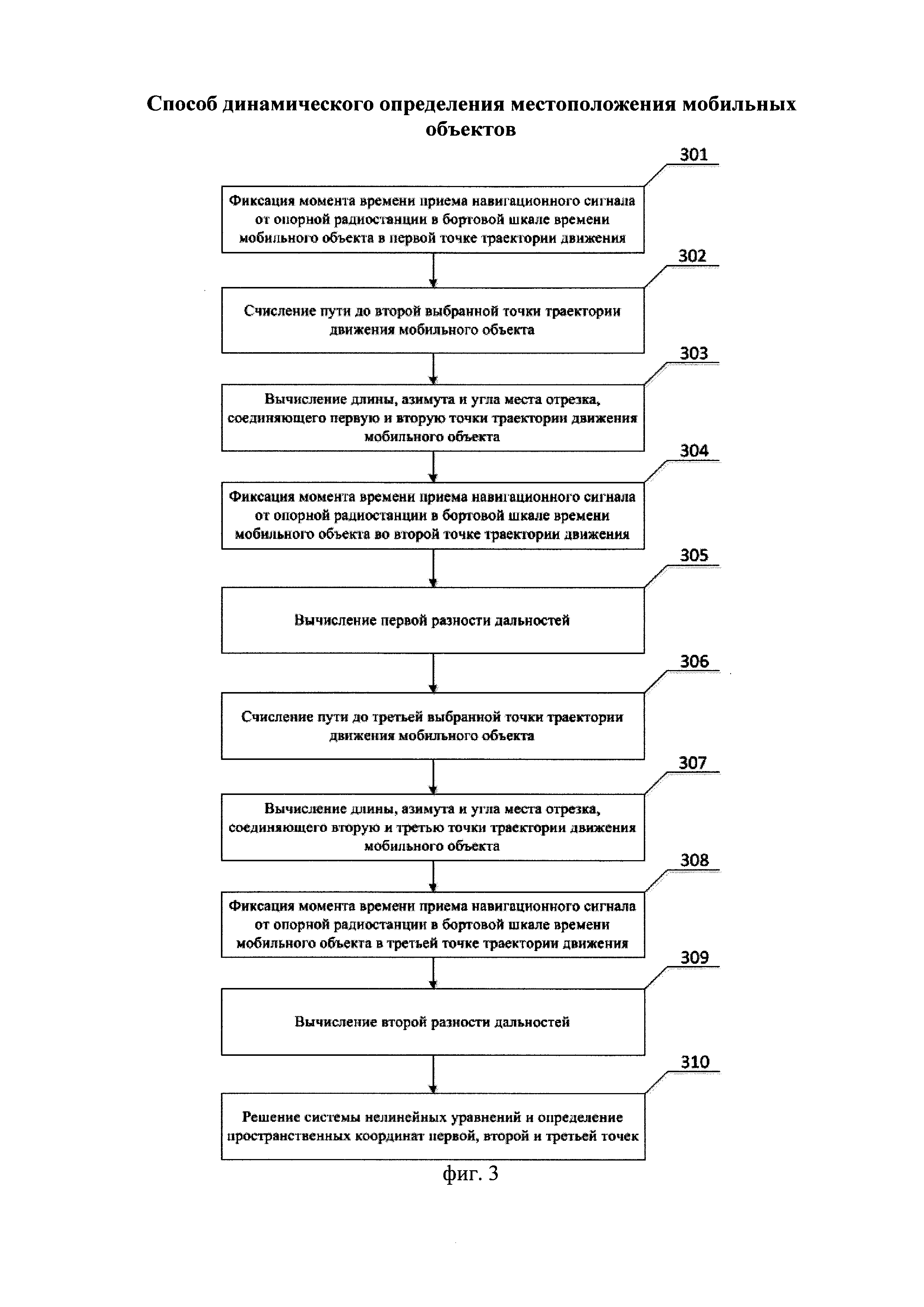
Представленный на фиг. 3 разностно-дальномерный (пассивный) вариант предлагаемого способа включает следующие этапы:
1. Фиксация момента времени приема навигационного сигнала от опорной радиостанции к бортовой шкале времени мобильного объекта в первой точке траектории движения 301.
2. Счисление пути до второй выбранной точки траектории движения мобильного объекта 302.
3. Вычисление длины, азимута и угла места отрезка, соединяющего первую и вторую точки траектории движения мобильного объекта 303.
4. Фиксация момента времени приема навигационного сигнала от опорной радиостанции в бортовой шкале времени мобильного объекта во второй точке траектории движения 304.
5. Вычисление первой разности дальностей 305 посредством умножения разности времени фиксации приема сигналов во второй и первой точках на скорость распространения радиоволн (скорость света).
6. Счисление пути до третьей выбранной точки траектории движения мобильного объекта 306.
7. Вычисление длины, азимута и угла места отрезка, соединяющего вторую и третью точки траектории движения мобильного объекта 307.
8. Фиксация момента времени приема навигационного сигнала от опорной радиостанции в бортовой шкале времени мобильного объекта в третьей точке траектории движения 308.
9. Вычисление второй разности дальностей 309 посредством умножения разности времени фиксации приема сигналов в третьей и второй точках на скорость распространения радиоволн (скорость света).
10. Решение системы нелинейных уравнений и определение пространственных координат первой, второй и третьей точек 310.
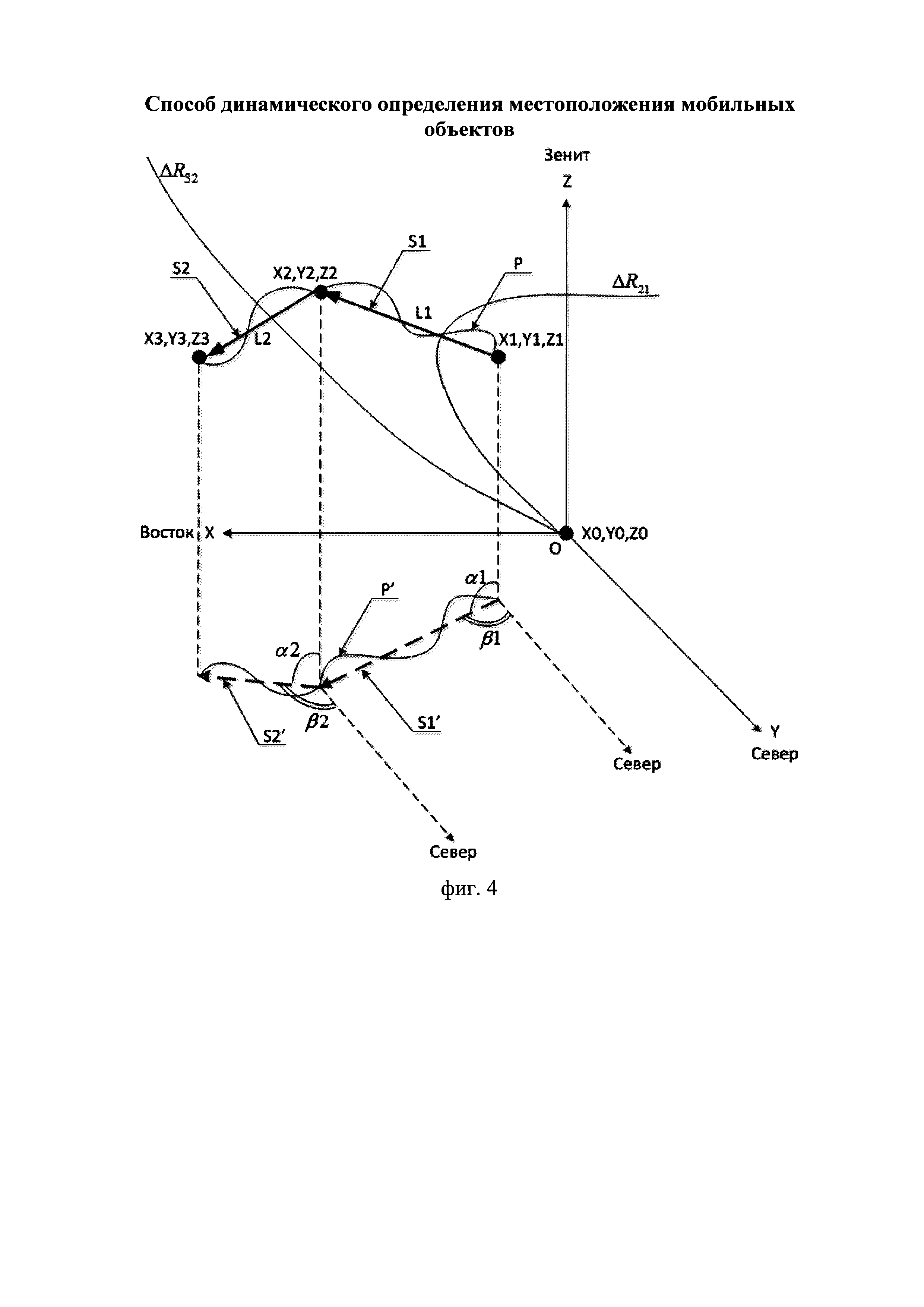
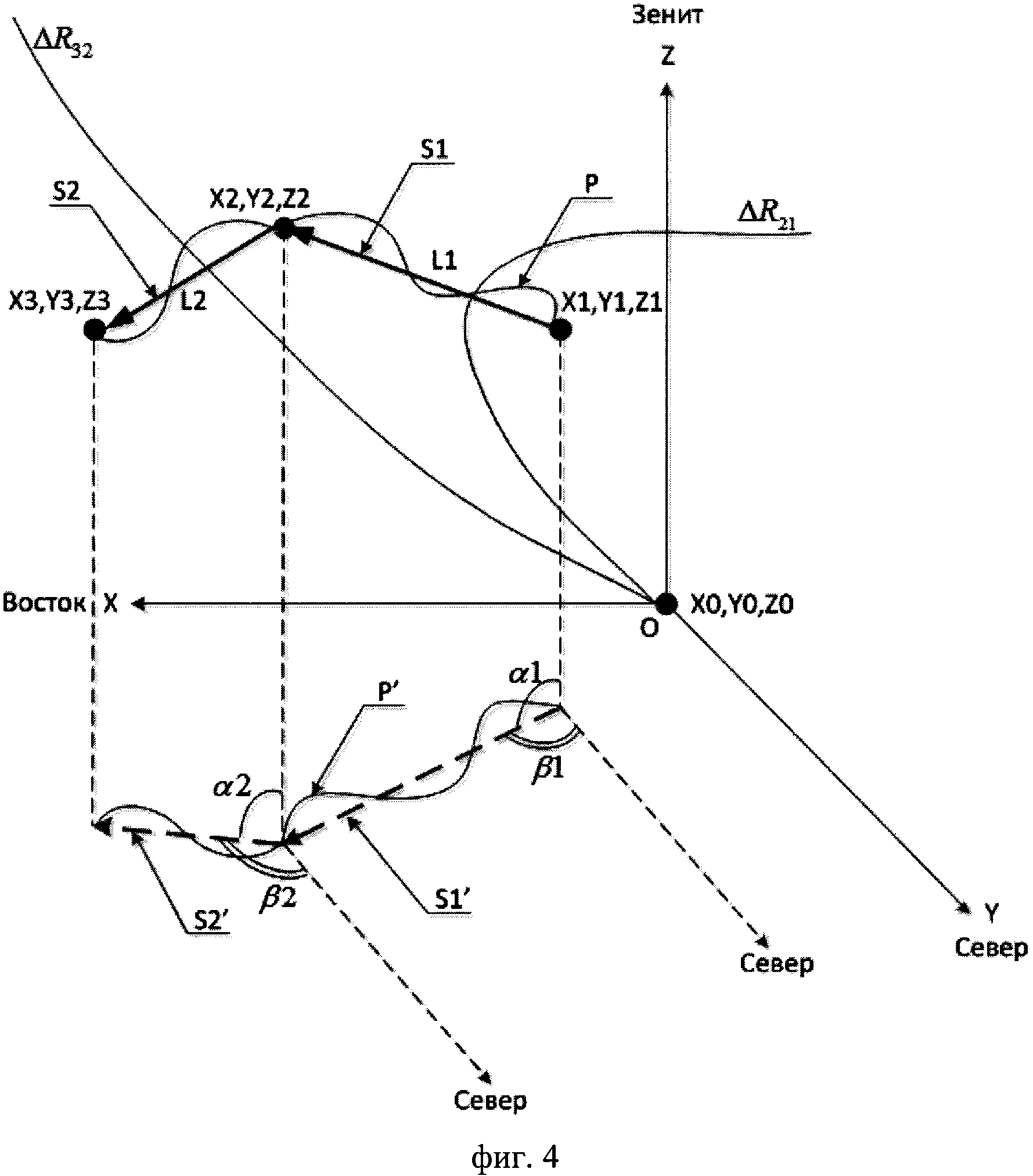
Как показано на фиг. 4, динамическое определение местоположения мобильных объектов для разностно-дальномерного (пассивного) варианта предлагаемого способа основано на измерении минимум двух разностей дальностей ΔR21 и ΔR32 между одной опорной радиостанцией (с известными координатами X0, Y0, Z0) и мобильным объектом в трех точках (с неизвестными координатами X1, Y1, Z1 и X2, Y2, Z2 и X3, Y3, Z3) траектории движения Р, определения длин L1, L2, азимутов β1, β2 и углов места α1, α2 отрезков S1, S2, соединяющих первую и вторую, а также вторую и третью точки траектории движения мобильного объекта соответственно.
Определение местоположения мобильного объекта основано на вычислении пространственных координат трех точек отрезков S1 и S2 посредством решения системы нелинейных уравнений (2).
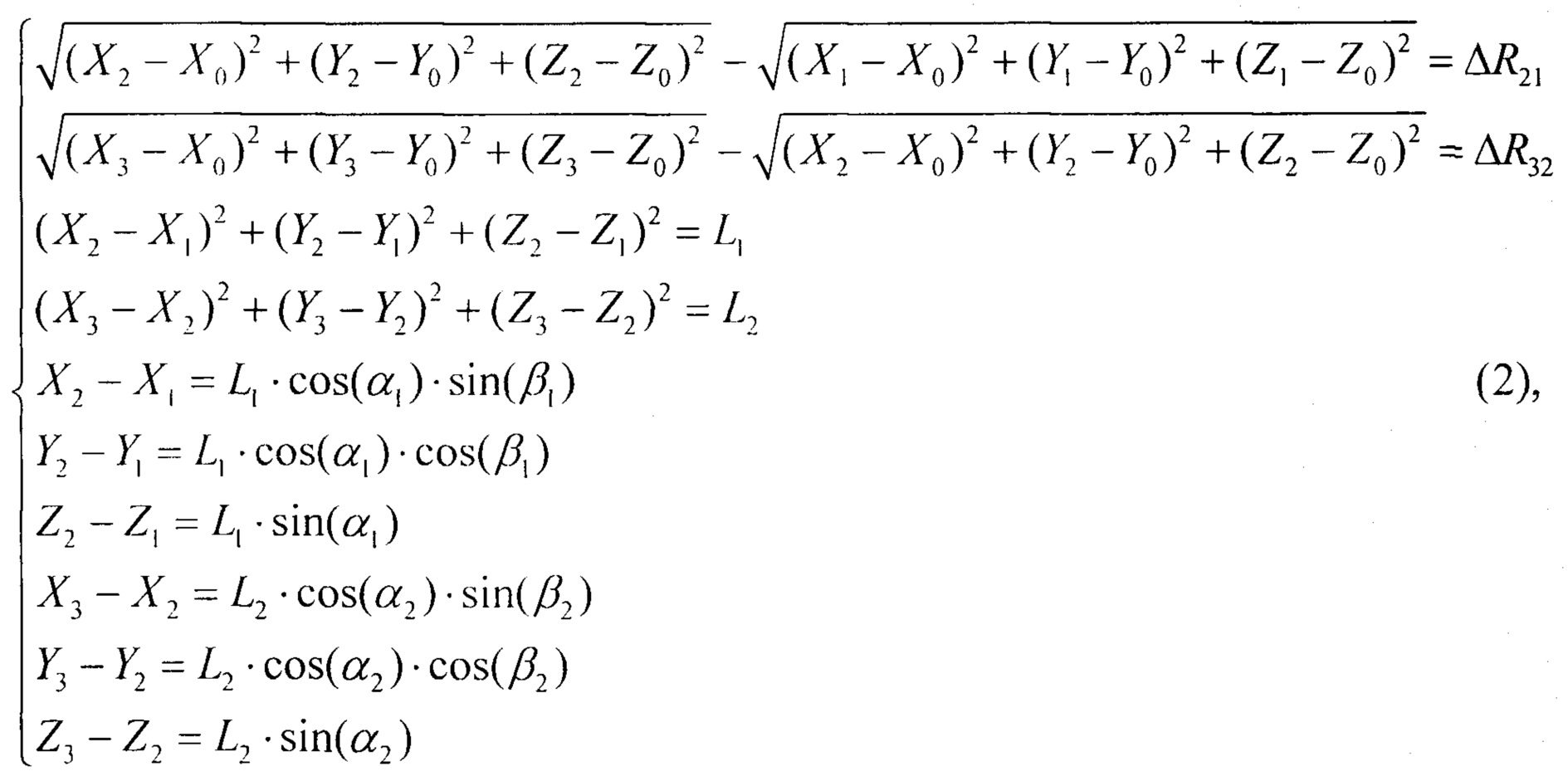
где (X1, Y1, Z1), и (X2, Y2, Z2) и (X3, Y3, Z3) - искомые координаты первой, второй и третьей точек траектории движения мобильного объекта.
Решение системы нелинейных уравнений (2) также основано, как правило, на итерационной процедуре.
Также необходимо отметить, что для решения навигационной задачи возможно использование большего количества точек траектории движения, т.е. больше двух для дальномерного и больше трех для разностно-дальномерного вариантов предлагаемого способа. Соответственно, возрастает количество уравнений в системах вида (1) и (2), увеличивается задержка решения навигационной задачи и возрастает ошибка определения координат, вследствие более длительного счисления пути, что, как правило, нецелесообразно.
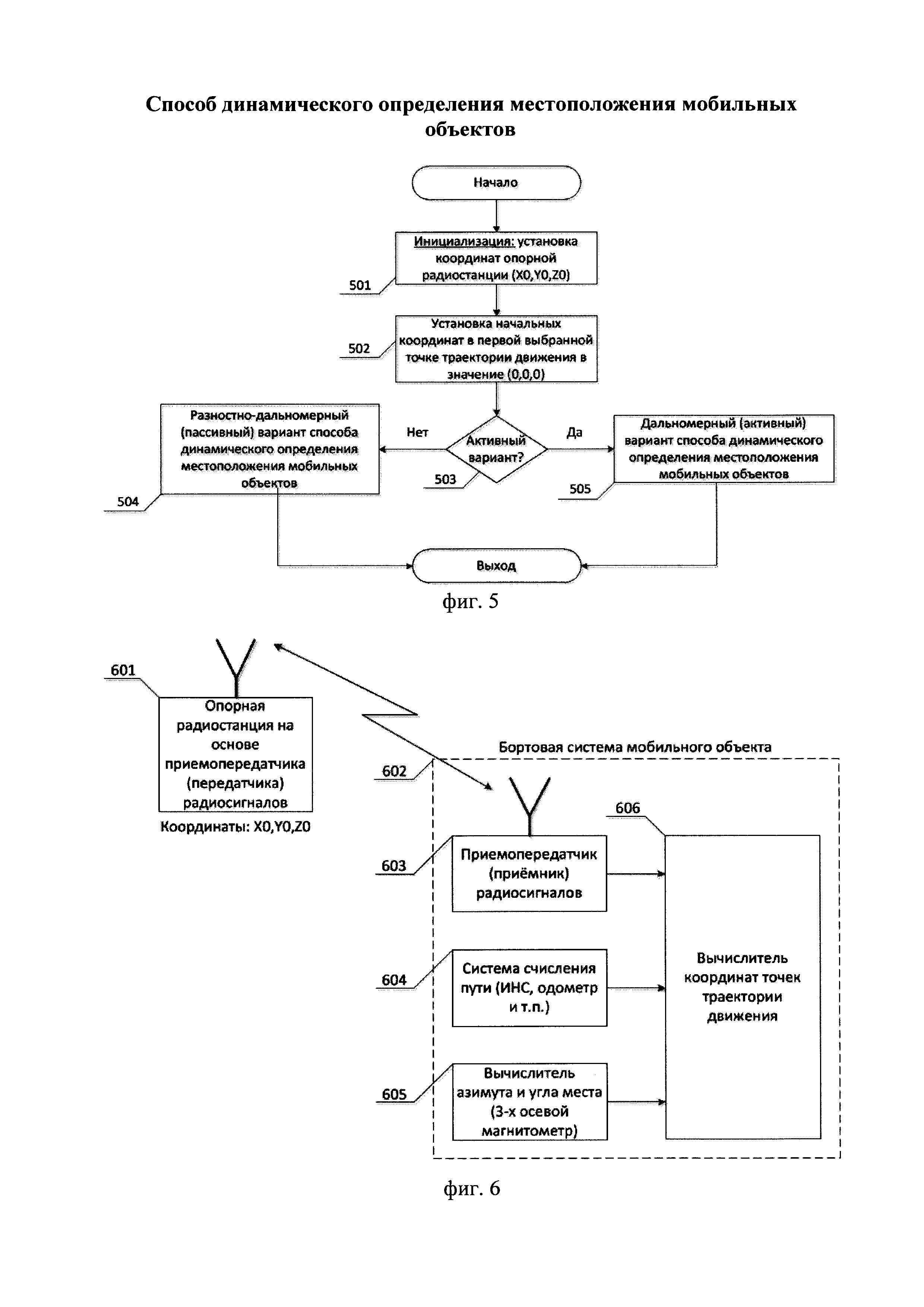
Блок-схема алгоритма, реализующего предлагаемый способ динамического определения местоположения мобильных объектов, представленного на фиг. 5, включает:
- блок инициализации 501, в котором устанавливаются координаты опорной радиостанции (X0, Y0, Z0), известные заранее или переданные по радиоканалу опорной радиостанцией или установленные в ноль при относительном определении местоположении мобильного объекта;
- блок установки в ноль начальных координат первой выбранной точки траектории движения 502, относительно которой будут определяться относительные координаты второй и третьей (в случае пассивного варианта) точек на основе счисления пути;
- выбор активного или пассивного варианта способа динамического определения местоположения 503, в зависимости от наличия или отсутствия обратного канала связи с опорной радиостанцией, соображений скрытности и других причин;
- определение координат первой, второй и третьей точек траектории движения относительно опорной радиостанции на основе разностно-дальномерного (пассивного) варианта предлагаемого способа 504, представленного выше и на фиг. 3;
- определение координат первой и второй точек траектории движения относительно опорной радиостанции на основе дальномерного (активного) варианта предлагаемого способа 505, представленного выше и на фиг. 1.
Целесообразно рассматривать следующие варианты осуществления изобретения (фиг. 6), такие как:
1. Использование приемопередатчика радиосигналов на опорной радиостанции 601, а также в бортовой системе мобильного объекта 602: приемопередатчик радиосигналов 603, ИНС (в составе трехосевых гироскопов и акселерометров) в качестве системы счисления пути 604, трехосевой магнитометр в качестве вычислителя азимута и угла места 605, электронно-вычислительную машину в качестве вычислителя координат точек траектории движения 606.
2. Использование передатчика радиосигналов на опорной радиостанции 601, а также в бортовой системе мобильного объекта 602: приемник радиосигналов 603, ИНС (в составе трехосевых гироскопов и акселерометров) в качестве системы счисления пути 604, трехосевой магнитометр в качестве вычислителя азимута и угла места 605, электронно-вычислительную машину в качестве вычислителя координат точек траектории движения 606 (только для разностно-дальномерного предлагаемого варианта способа).
3. Использование приемопередатчика радиосигналов на опорной радиостанции 601, а также в бортовой системе мобильного объекта 602: приемопередатчик радиосигналов 603, ИНС (в составе трехосевых гироскопов и акселерометров) и одометр в качестве системы счисления пути 604, трехосевой магнитометр в качестве вычислителя азимута и угла места 605, электронно-вычислительную машину в качестве вычислителя координат точек траектории движения 606.
4. Использование передатчика радиосигналов на опорной радиостанции 601, а также в бортовой системе мобильного объекта 602: приемник радиосигналов 603, ИНС (в составе трехосевых гироскопов и акселерометров) и одометр в качестве системы счисления пути 604, трехосевой магнитометр в качестве вычислителя азимута и угла места 605, электронно-вычислительную машину в качестве вычислителя координат точек траектории движения 606 (только для разностно-дальномерного предлагаемого варианта способа).
Представленные варианты реализации предлагаемого способа особенно актуальны для роботов и БПЛА, как правило, содержащих на борту ИНС, включающую трехосевые гироскопы и акселерометры, трехосевые магнитометры, приемник или приемопередатчик радиосигналов.
Список источников
1. Patent application US №4,713,767, application number US 730,572. - Apparatus for calculating position of vehicle. Published 15.12.1987.
2. Patent application US №4,731,613, application number US 804,511. - Positioning system for a vehicle. Published 15.03.1988.
3. Patent application US №2005/0032526 A1, application number US 10/909,819. - Wireless communication positioning method and system. Published 10.02.2005.
4. Patent application US №5,132,695, application number US 645,314. - Radio navigation system. Published 21.07.1992.
5. Методы спутникового и наземного позиционирования. Перспективы развития технологий обработки сигналов // Под ред. Д. Дардари, Э. Фаллетти, М. Луизе. Москва: Техносфера, 2012. - 528 с., ISBN 978-5-94836-338-7.
6. Васильев Ф.П. Методы оптимизации. Москва: Факториал Пресс, 2002. - 824 с., ISBN 5-88688-056-9.
Способ динамического определения местоположения мобильных объектов, включающий определение дальностей или разностей дальностей до опорной радиостанции в различных точках траектории движения: определение длины, азимута и угла места отрезков, последовательно соединяющих точки траектории движения; определение пространственных координат точек траектории движения на основе решения системы нелинейных уравнений; отличающийся: применением как дальностей, так и разностей дальностей до опорной радиостанции для решения навигационной задачи; определением минимум двух дальностей или разностей дальностей до опорной радиостанции в двух или трех точках траектории движения соответственно; определением на основе счисления пути относительных координат последующих точек траектории движения относительно первой для формирования отрезков; определением длины, азимута и угла места отрезков, последовательно соединяющих точки траектории движения, при произвольной форме траектории движения между всеми парами смежных точек.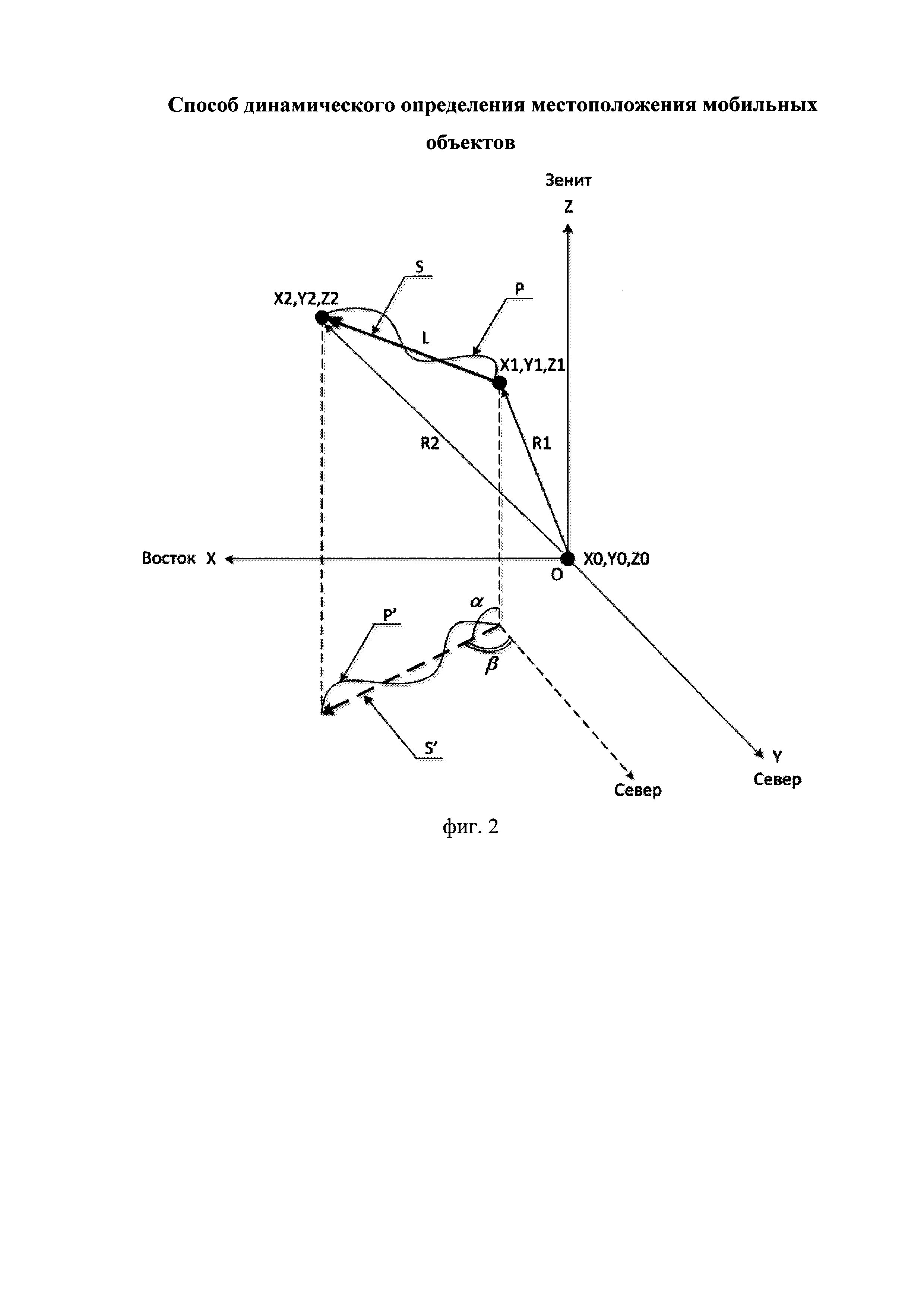
Аппаратура подводной оптической связи
Устройство для восстановления центровых отверстий осей
Способ формирования синфазной и квадратурной составляющих комплексной огибающей спектрально-эффективных радиосигналов
Способ определения местоположения на основе сигнатур изображений городской застройки в видимом и инфракрасном диапазонах
Способ обнаружения и исправления фальсификаций фонограмм на основе представления хургина-яковлева
Способ обнаружения наличия заданного вида помехоустойчивого кодирования дискретной последовательности
Способ компенсации функций передачи модуляции пространственно и спектрально перекрывающихся изображений, одновременно формируемых системой дистанционного зондирования земли
Подъемно-катковый механизм
Гомогенизатор
Аппаратура подводной оптической связи
Устройство для восстановления центровых отверстий осей
Способ формирования синфазной и квадратурной составляющих комплексной огибающей спектрально-эффективных радиосигналов
Способ определения местоположения на основе сигнатур изображений городской застройки в видимом и инфракрасном диапазонах
Способ обнаружения и исправления фальсификаций фонограмм на основе представления хургина-яковлева
Способ обнаружения наличия заданного вида помехоустойчивого кодирования дискретной последовательности
Способ компенсации функций передачи модуляции пространственно и спектрально перекрывающихся изображений, одновременно формируемых системой дистанционного зондирования земли
Подъемно-катковый механизм
Гомогенизатор

