Результат интеллектуальной деятельности: Система фиксации космонавта при передвижении по внешней поверхности космического объекта и способ её эксплуатации
Вид РИД
Изобретение
Изобретения относятся к космической технике, в частности к средствам обеспечения деятельности и безопасности космонавта в открытом космическом пространстве, в том числе на внешней поверхности космического объекта, например орбитальной станции (ОС), а также могут быть использованы в различных видах монтажных работ в иных средах для прокладки гибких протяженных по длине изделий: кабелей, шлангов и т.п.
Под фиксацией в условиях невесомости понимается искусственное ограничение числа степеней свободы одного объекта по отношению к другому - базовому, путем наложения связей различной жесткости. (О.С. Цыганков. Трудовая деятельность в безопорном пространстве // Полет, №2. 2002, с. 6.)
Надежная связь космонавта с ОС при работах на ее внешней поверхности, исключение возможности несанкционированного отделения космонавта от станции является доминирующей задачей при организации и техническом обеспечении внекорабельной деятельности (ВКД). С этой целью поверхность ОС оснащена поручнями, установленными на стойках, расположенных по трассе, исходя из конструктивных соображений.
Известен отечественный скафандр для ВКД "Орлан-Д" (1977-1984 гг.), снабженный страховочным фалом с карабином (И.П. Абрамов и др. Космические скафандры России // ОАО "Научно-производственное предприятие "Звезда". Москва. 2005. С. 339, рис. 8.1-1). Космонавт передвигается по поручням с помощью рук, перемещая при этом скольжением карабин страховочного фала, зафиксированный за поручень, от стойки до стойки. Обеспечивая связь с ОС, такой способ фиксации требует выполнения большого количества перецепок карабина у стоек, что вызывает чрезмерную утомляемость мышц-сгибателей кистей и пальцев космонавта в наддутых перчатках.
В состав скафандра "Орлан-ДМА" (1988-1997 гг.), с переходом на автономное электропитание и беспроводную связь, был введен второй страховочный фал для параллельного применения (И.П. Абрамов и др. Космические скафандры России. // ОАО "Научно-производственное предприятие "Звезда". Москва. 2005, с. 341). Это повысило надежность фиксации космонавта к ОС, но еще в большей степени увеличило нагрузку на руки космонавта, т.к. требовалось для каждого шага при передвижении перецеплять уже два карабина.
В скафандре "Орлан-М" (для орбитальной станции "Мир" и МКС с 1998 г.), один из 2-х страховочных фалов выполнен переменной длины (И.П. Абрамов и др. Космические скафандры России // ОАО "Научно-производственное предприятие "Звезда". Москва. 2005, с. 342, рис. 8. 2-1; Патент RU 2528504, опубл. 20.09.2014, МПК B64G 1/66 (2006.01)). Такое решение снижало количество перецепок в рабочей зоне с радиусом 2,5-3 м, но при передвижении по поручням необходимость в выполнении перецепок 2-х карабинов осталась, что мало способствует снижению энергозатрат космонавта в процессе ВКД.
Известно средство фиксации космонавта на корпусе космического аппарата (патент RU 2053942, опубл. 10.02.1996, МПК B64G 1/66 (2006.01)), содержащее поручни, жестко закрепленные на внешней поверхности корпуса космического аппарата, и снабженное фалами и упругими элементами, расположенными вдоль трассы поручней, один конец каждого фала жестко закреплен на одном из поручней, а второй конец снабжен кольцом и закреплен с возможностью скольжения на соответствующем упругом элементе, жестко связанным с поручнем. Предлагаемое средство могло бы несколько снизить количество перецепок карабина страховочного фала, однако фал, входящий в состав данного средства, по своей длине может перекрыть не более 2-3 интервалов между стойками. Необходимость перецепок сохраняется, при этом зацепление карабина за кольцо на конце мягкого фала одной рукой невозможно, в то время как вторая рука космонавта должна находиться в захвате за поручень. Кроме того, вся конструкция в целом загромождает пространство вдоль трассы поручней и неоправданно увеличивает общую массу объекта.
В качестве прототипа системы выбрана система, описанная в IAC-02-IAA.10.1.02. Russian-American Cooperation in EVA Area (from Russian Perspective). O.S. Tsygankov // 53rd International Astronautical Congress. The Word Space Congress-2002 10-19 Oct 2002/Houston, Texas, p. 4. Известная система фиксации космонавта при передвижении по внешней поверхности космического объекта включает поручни, жестко закрепленные на внешней поверхности корпуса космического объекта, закрепленную на скафандре космонавта страховочную лебедку со страховочным тросом, свободный конец которого зафиксирован на неподвижном элементе конструкции, расположенном на внешней поверхности космического объекта. При передвижении космонавта, по мере удаления от точки закрепления карабина, трос вытравливается, при возвращении - наматывается на барабан.
В качестве прототипа способа эксплуатации данной системы выбран способ, описанный в О.С. Цыганков. Начало сотрудничества России и США в области внекорабельной деятельности // Пилотируемые полеты в космос. Научно-технический журнал №1, 2014, ФГБУ "НИИ ЦПК имени Ю.А. Гагарина", с. 111. Известный способ эксплуатации данной системы фиксации космонавта при передвижении по внешней поверхности космического объекта включает прикрепление на скафандре космонавта страховочной лебедки со страховочным тросом, свободный конец которого фиксируют к неподвижному элементу конструкции на внешней поверхности космического объекта.
Данная система и способ ее эксплуатации исключают перецепки карабина по трассе поручней. Однако поверхность ОС содержит во множестве выступающие элементы: мишени, датчики, антенны, приводы солнечных батарей, дренажные клапаны, кабельные трассы, научную аппаратуру и многое другое. Невозможно исключить заматывание, зацеплении вытравленного троса за выступающие элементы при передвижении космонавта, при изменении направления движения на углы вплоть до 90°, при передвижении по дуге цилиндрических поверхностей, при переходе с одного модуля на другой, пристыкованный перпендикулярно к оси X ОС, и т.п. Зацепление троса представляет опасность как для космонавта, так и для внешнего оборудования, особенно при возвращении в шлюзовой отсек. Кроме того, при случайном отделении космонавта от станции, существует опасность его удаления на всю длину вытравленного троса с неизбежным рывком в точке закрепления троса, что категорически неприемлемо.
Задачей предлагаемых изобретений является обеспечение надежности и быстродействия фиксации космонавтов, освобождение от необходимости выполнять перецепки карабинов страховочных фалов при передвижении, исключение несанкционированного отделения космонавта от космического объекта, экономия времени в сеансах ВКД для целевых операций, предотвращение неконтролируемой миграции страховочного троса по поверхности космического объекта.
Техническим результатом изобретений является повышение безопасности, надежности, эргономичности и быстродействия фиксации космонавта при передвижении по внешней поверхности космического объекта, а также предотвращение неконтролируемой миграции страховочного троса по поверхности космического объекта.
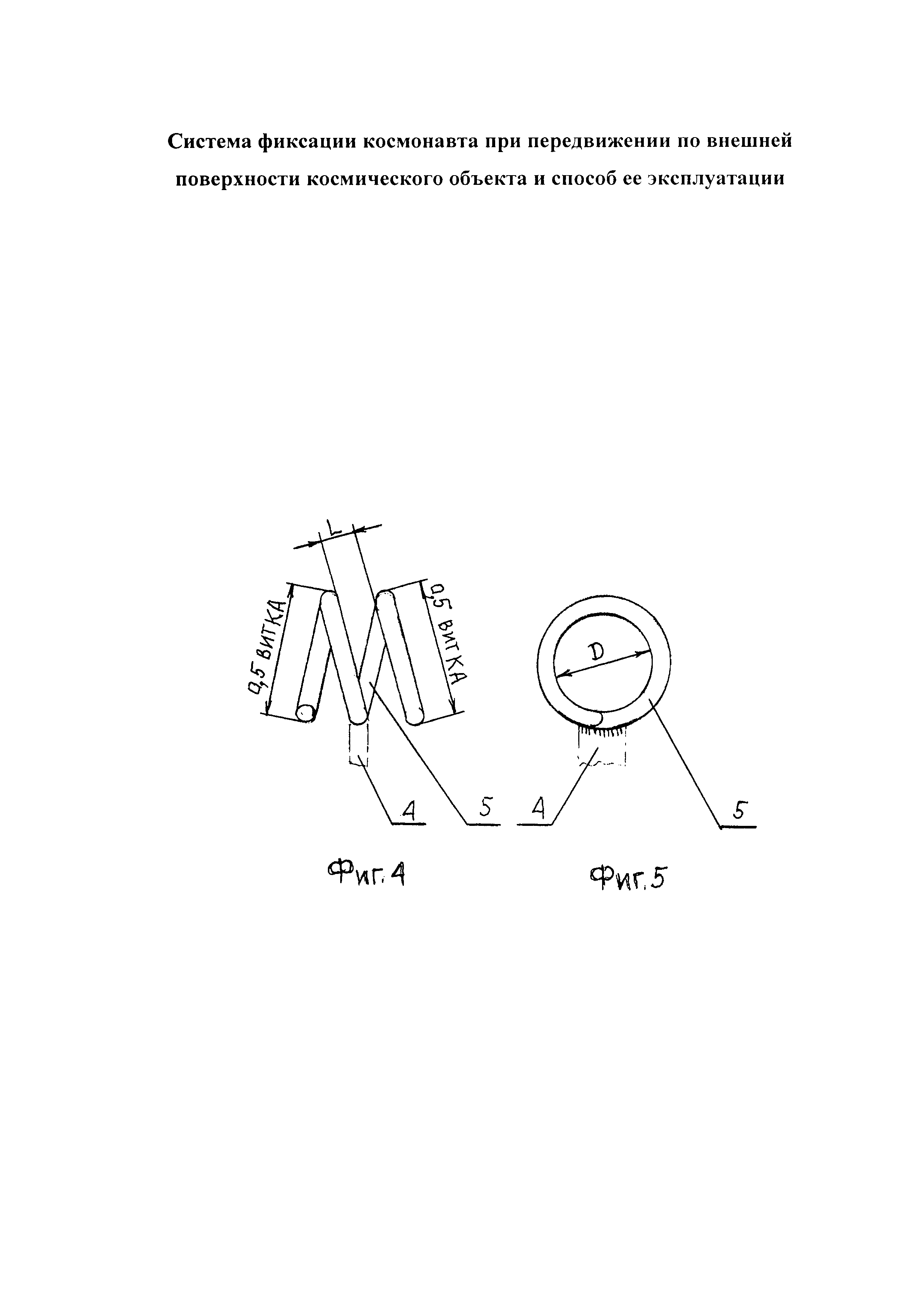
Технический результат достигается тем, что в систему фиксации космонавта при передвижении по внешней поверхности космического объекта, включающую поручни, жестко закрепленные на внешней поверхности корпуса космического объекта, закрепленную на скафандре космонавта страховочную лебедку со страховочным тросом, свободный конец которого зафиксирован на неподвижном элементе конструкции, расположенном на внешней поверхности космического объекта, введены кронштейны с цилиндрическими винтовыми спиралями, каждая из которых выполнена осесимметричной по схеме: 0,5 витка + 1 полный виток + 0,5 витка, и жестко закреплена на поручнях в центральной части полного витка через кронштейн, при этом учитывают выполнение следующих условий:

 ,
,
где L - расстояние между витками спирали, мм;
D - внутренний диаметр спирали, мм;
d - диаметр страховочного троса, мм, причем спирали установлены в начале и конце прямолинейных участков, на поворотах и изломах трассы поручней с шагом, сопоставимым с функциональной досягаемостью вытянутой руки космонавта.
Технический результат достигается также и тем, что в способе эксплуатации системы фиксации космонавта при передвижении по внешней поверхности космического объекта, включающем прикрепление на скафандре космонавта страховочной лебедки со страховочным тросом, свободный конец которого фиксируют к неподвижному элементу конструкции на внешней поверхности космического объекта, по мере разматывания страховочного троса вводят его участок в пространство между соседними витками спирали перпендикулярно ее продольной оси и направлению перемещения космонавта, затем поворачивают введенный между витками спирали участок страховочного троса на 90°, заправляют его внутрь спирали и производят протяжку страховочного троса в направлении передвижения космонавта.
Сущность изобретения поясняется таблицей и фиг. 1-12.
В таблице приведены результаты определения L (мм) и D (мм) по предложенным формулам (1) и (2) для некоторых точек в диапазоне d=3÷50 мм.
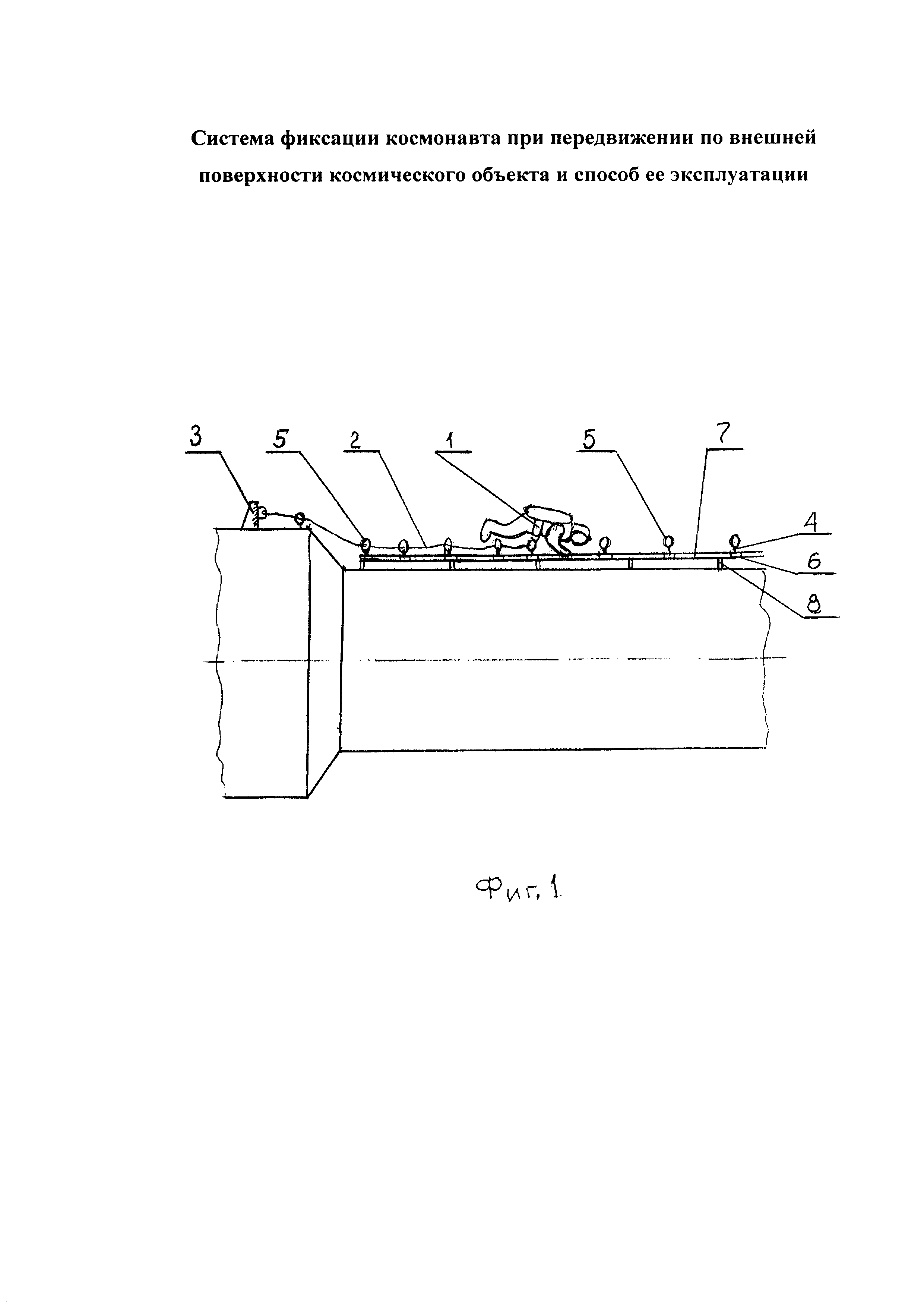
На фиг. 1 представлена схема системы фиксации космонавта при передвижении по внешней поверхности космического объекта.
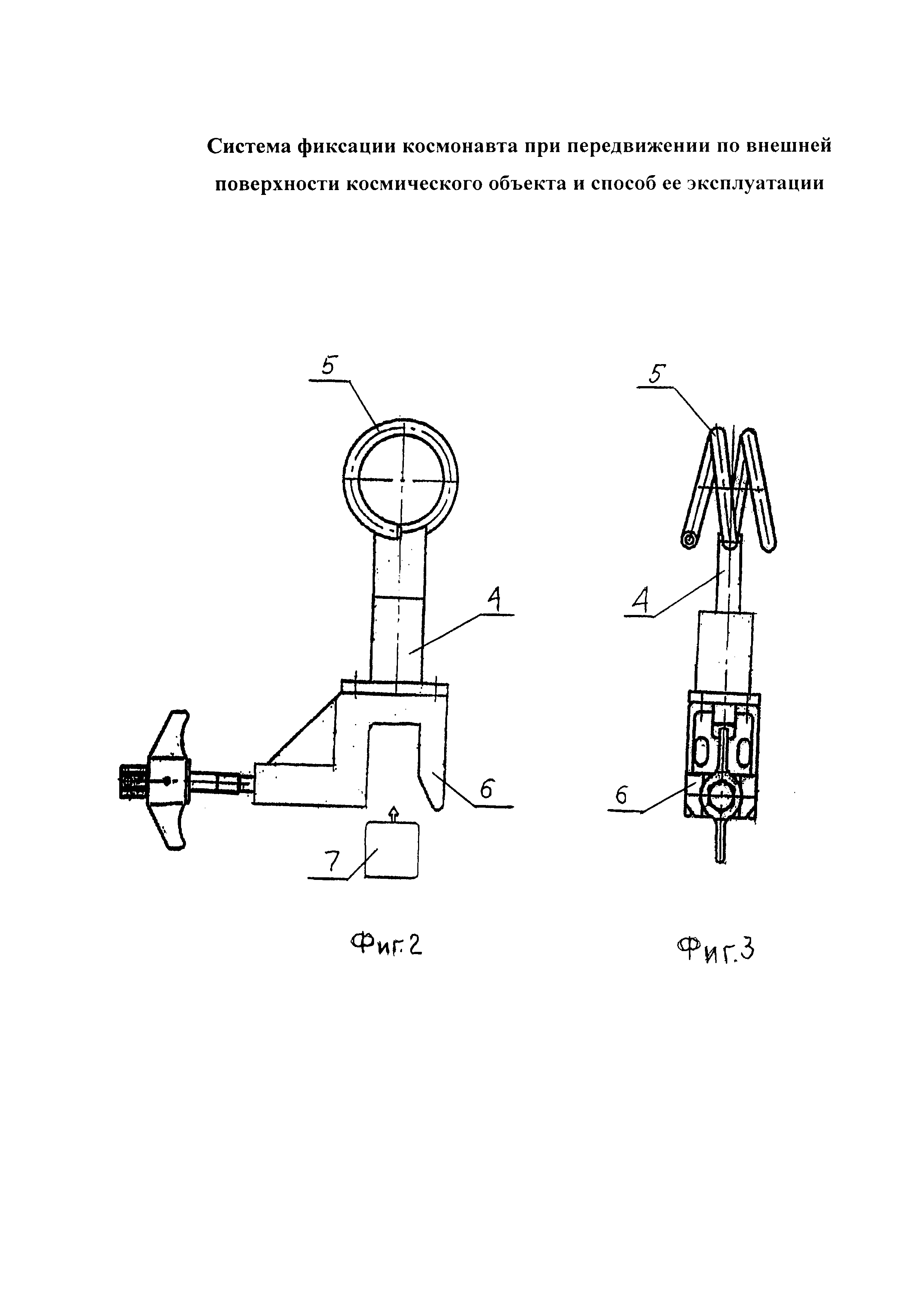
На фиг. 2 - пример крепления кронштейна с винтовой цилиндрической спиралью к поручню (вид спереди).
На фиг. 3 - пример крепления кронштейна с винтовой цилиндрической спиралью к поручню (вид сбоку).
На фиг. 4 - цилиндрическая винтовая спираль (вид спереди).
На фиг. 5 - цилиндрическая винтовая спираль (вид сбоку).
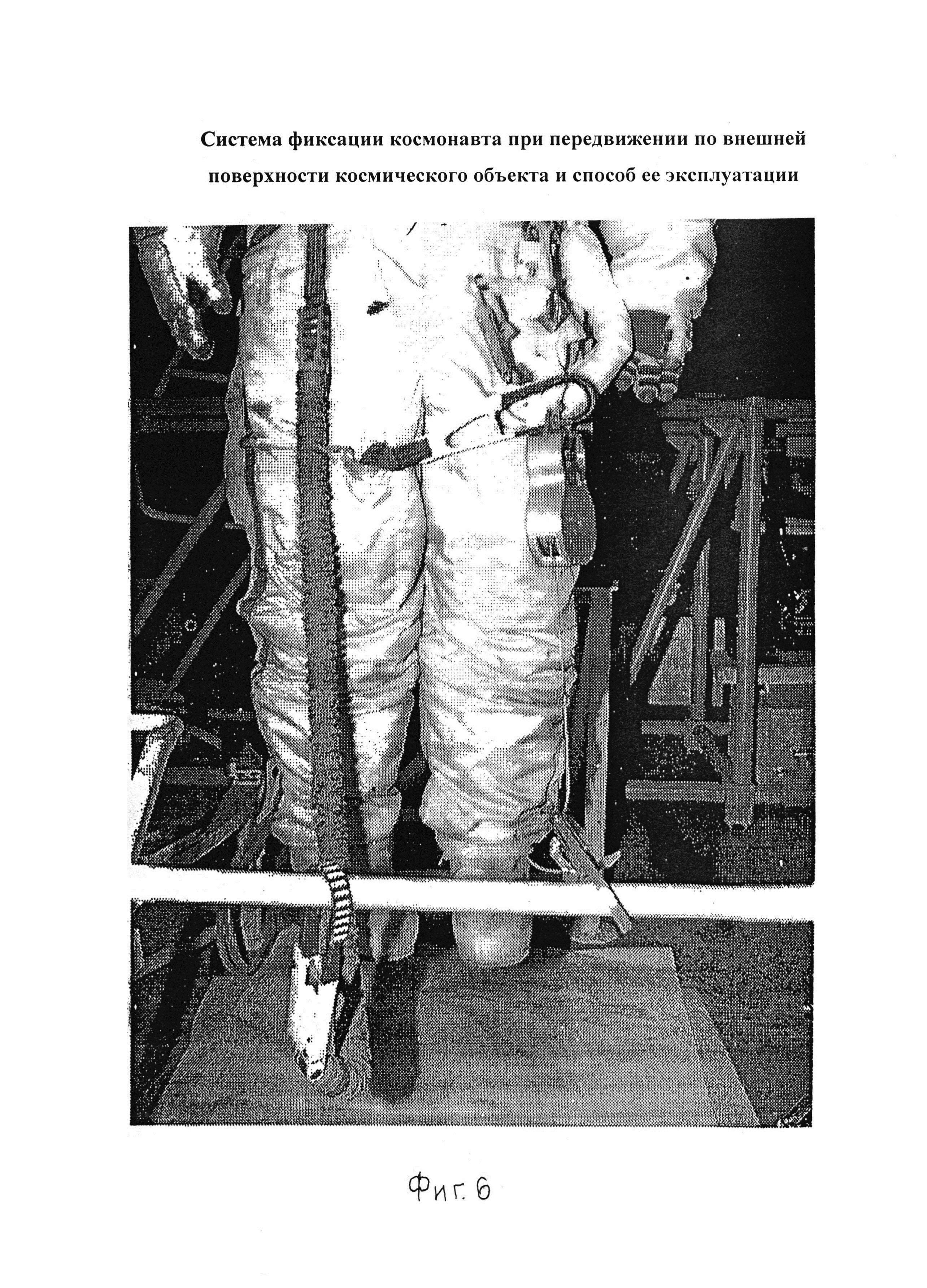
На фиг. 6 - крепление страховочной лебедки на скафандре и свободного конца страховочного троса на неподвижном элементе конструкции на внешней поверхности космического объекта.
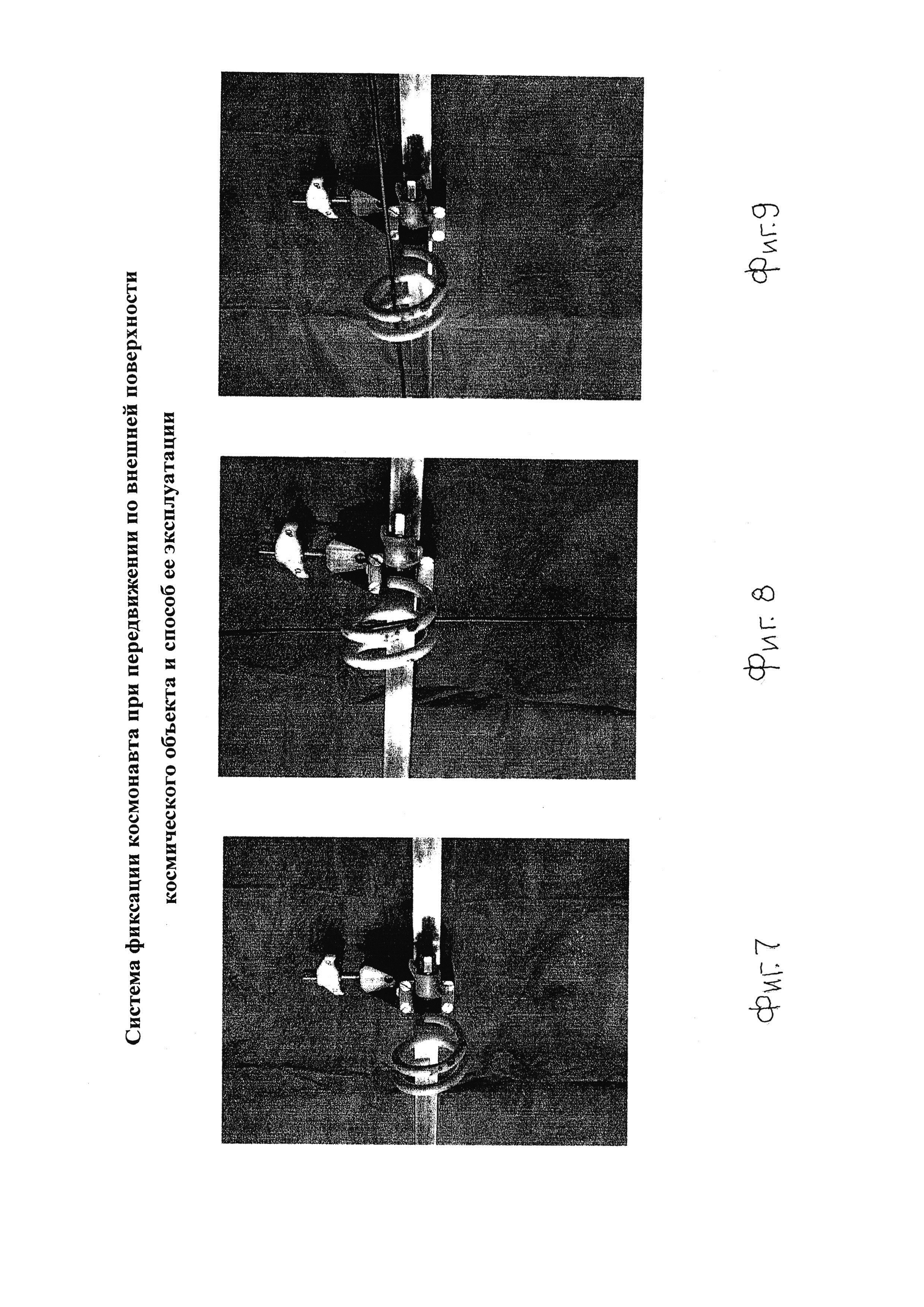
На фиг. 7-9 - последовательность введения страховочного троса внутрь витка цилиндрической винтовой спирали.
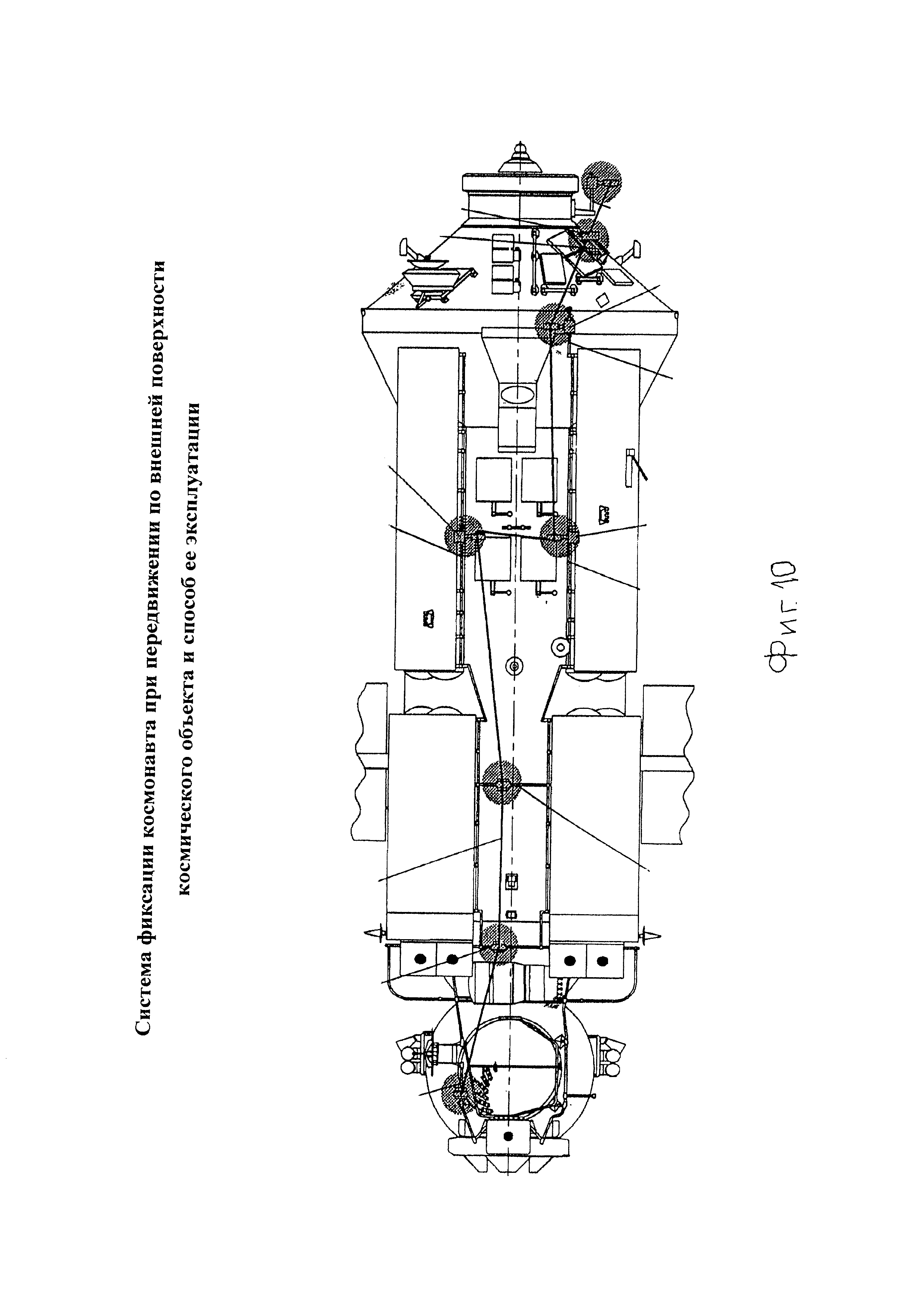
На фиг. 10 - пример возможной схемы размещения кронштейнов с винтовыми цилиндрическими спиралями на внешней поверхности космического объекта.
На фиг. 11 - пример реализации изобретения для прокладки гибких протяженных по длине изделий разного диаметра: тросов, кабелей, шлангов и др.
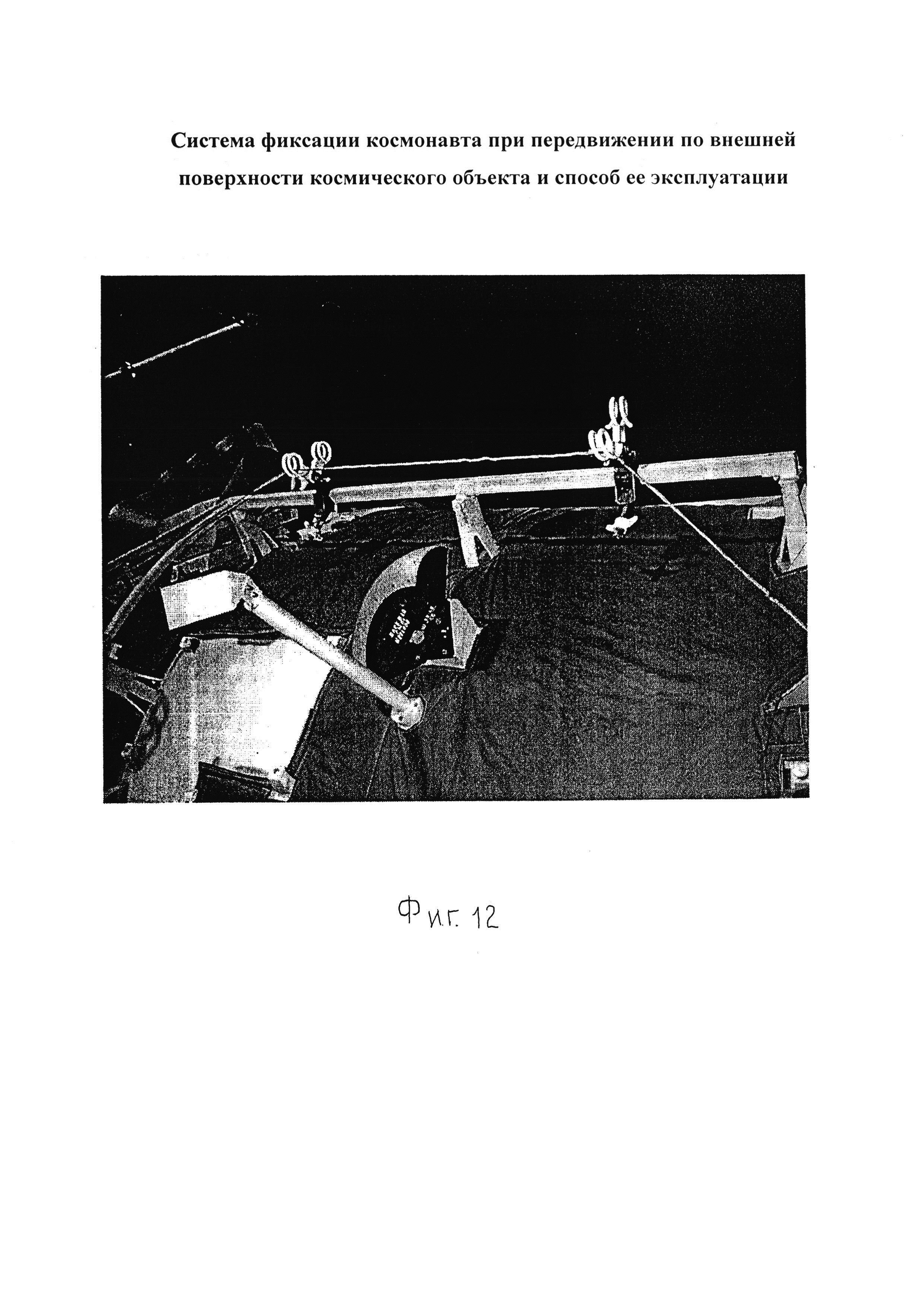
На фиг. 12 - пример реализации изобретения с установкой на кронштейне двух спиралей для обеспечения фиксации космонавтов, работающих в паре.
На чертежах введены следующие обозначения:
1 - страховочная лебедка;
2 - страховочный трос;
3 - неподвижный элемент конструкции на внешней поверхности космического объекта;
4 - кронштейн;
5 - цилиндрическая винтовая спираль;
6 - элемент крепления (замок) кронштейна с винтовой цилиндрической спиралью к поручню на поверхности космического объекта;
7 - поручень;
8 - стойка.
Система фиксации космонавта при передвижении по внешней поверхности космического объекта (фиг. 1) включает поручни 7, жестко закрепленные на стойках 8 внешней поверхности корпуса космического объекта, закрепленную на скафандре космонавта страховочную лебедку 1 со страховочным тросом 2, свободный конец которого зафиксирован на неподвижном элементе конструкции 3, расположенном на внешней поверхности космического объекта, в нее введены кронштейны 4 с цилиндрическими винтовыми спиралями 5, каждая из которых выполнена осесимметричной по схеме: 0,5 витка + 1 полный виток + 0,5 витка (фиг. 4, 5), и жестко закреплена, например, с помощью замка 6 (фиг. 2, 3) на поручнях 7 в центральной части полного витка через кронштейн 4, при этом учитывают выполнение следующих условий:
 ,
,
 ,
,
где L - расстояние между витками спирали, мм;
D - внутренний диаметр спирали, мм;
d - диаметр страховочного троса, мм,
причем спирали установлены в начале и конце прямолинейных участков, на поворотах и изломах трассы поручней с шагом, сопоставимым с функциональной досягаемостью вытянутой руки космонавта (фиг. 10).
Формулы (1) и (2) обоснованы следующим образом.
Зависимости (1,2÷1,4)d и (1,4÷1,6)d определяют зазоры, обеспечивающие свободное введение троса между витками и протяжку троса внутри спирали, что подтверждено экспериментально в условиях моделирования невесомости при полетах на самолете.
С позиций эргономики внекорабельной деятельности, расстояние между витками спирали L должно находиться в пределах разрешающей способности космонавта в скафандре работать с мелкими объектами, то есть не менее 12 мм.
Внутренний диаметр спирали должен соответствовать "Отраслевому стандарту ОСТ 134-1004-95. Средства фиксации для внекорабельной деятельности. Общие технические требования", п. 4.1.6.9.: «Отверстия (круглые или другой формы) должны иметь поперечный размер не менее 30 мм». Это требование предъявляется во избежание защемления в отверстии пальца, диаметр которого в наддутой перчатке равен 30 мм, а также для обеспечения возможности выполнения космонавтом ручных манипуляций в наддутых перчатках.
Было проведено определение L (мм) и D (мм) по предложенным формулам (1) и (2) для некоторых точек в диапазоне d=3÷50 мм (таблица).
Из таблицы следует, что в отдельных ситуациях, при малых диаметрах троса, например, в диапазоне d=3÷8 мм, расстояние между витками L, определенное по формуле (1), не является достаточным для работы космонавта в скафандре, поэтому выполняют L=12 мм.
Аналогично, при диаметре троса в диапазоне d=3÷18 мм внутренний диаметр спирали D, полученный по формуле (2), является эргономически неприемлемым, поэтому выполняют D=30 мм.
При диаметре троса d>8 мм для определения L и d>10 мм для определения D, предложенные формулы справедливы с учетом правых частей неравенств, указывающих на минимально допустимые размеры L и D.
Способ эксплуатации системы фиксации космонавта при передвижении по внешней поверхности космического объекта включает прикрепление на скафандре космонавта страховочной лебедки 1 со страховочным тросом 2, свободный конец которого фиксируют к неподвижному элементу конструкции 3 на внешней поверхности космического объекта (фиг. 6), по мере разматывания страховочного троса 2 вводят его участок в пространство между соседними витками спирали 5 перпендикулярно ее продольной оси и направлению перемещения космонавта (фиг. 8), затем поворачивают введенный между витками спирали 5 участок страховочного троса 2 на 90°, заправляют его внутрь спирали 5 и производят протяжку страховочного троса в направлении передвижения космонавта (фиг. 9).
Изобретение может быть реализовано для прокладки гибких протяженных по длине изделий разного диаметра: тросов, кабелей, шлангов и др. (фиг. 11), посредством подборки спиралей, диаметры которых соответствуют диаметрам каждого из изделия.
Для обеспечения фиксации космонавтов, работающих в паре, возможна установка на кронштейне двух спиралей (фиг. 12).

Способ управления движением космического объекта после отделения от другого космического объекта
Коммутатор напряжения с защитой от перегрузки по току
Способ измерения дальности до объектов по их изображениям преимущественно в космосе
Центробежное рабочее колесо
Способ эксплуатации электролизной системы, работающей при высоком давлении
Многослойная трансформируемая герметичная оболочка
Устройство для определения параметров двухполюсника
Способ определения тензора инерции космического аппарата
Способ тарировки датчика микроускорений в космическом полете
Способ определения параметров двухполюсника
Ионный двигатель
Космический приемник-преобразователь лазерного излучения
Способ определения величины атмосферной рефракции в условиях космического полета
Способ зондирования верхней атмосферы
Способ электролиза воды под давлением в электролизной системе
Способ определения скорости движения фронтальной части ледника с космического аппарата
Способ управления движением космического объекта после отделения от другого космического объекта
Коммутатор напряжения с защитой от перегрузки по току
Способ измерения дальности до объектов по их изображениям преимущественно в космосе
Центробежное рабочее колесо

