Результат интеллектуальной деятельности: СПОСОБ АВТОНОМНОГО ОЦЕНИВАНИЯ ИЗМЕНЕНИЙ ОРБИТЫ ВИЗИРУЕМОГО КОСМИЧЕСКОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к бортовым комплексам управления (БКУ) космическими аппаратами (КА) и предусматривает на борту визирующего аппарата (КА-1) автономную высокоточную оценку орбиты визируемого аппарата (КА-2), ориентации корпуса КА-1 и линии визирования в геоцентрической экваториальной инерциальной системе координат (ГЭИСК). На основе перечисленного в БКУ КА-1 оперативно определяются факты изменения орбиты КА-2.
Оценка ориентации КА-1 производится на основании информации от жестко закрепленного на его корпусе оптико-электронного прибора (ОЭП-1). Определение орбиты КА-2 осуществляется на основе информации от ОЭП-2, помещенного в карданов подвес и визирующего КА-2.
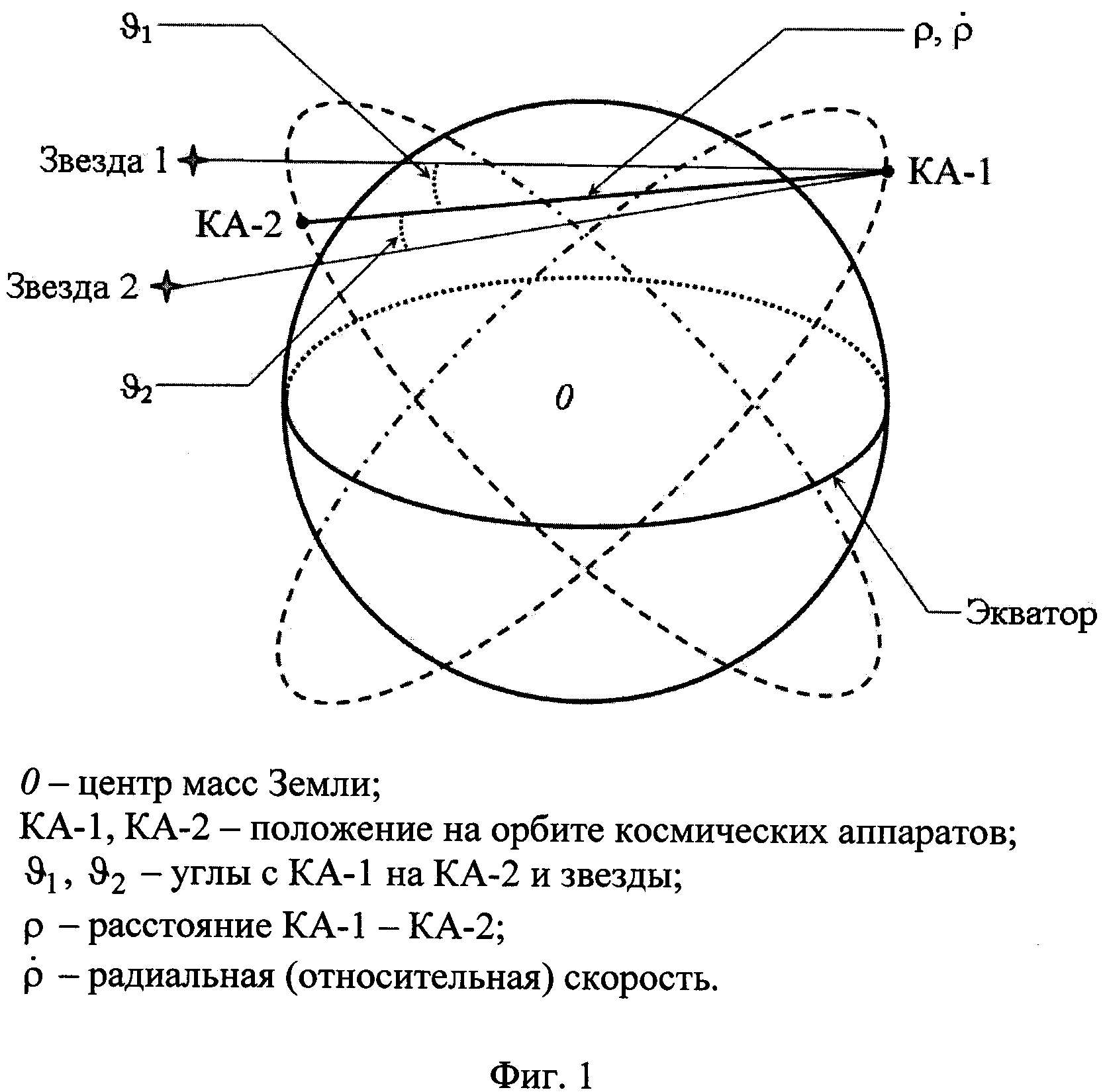
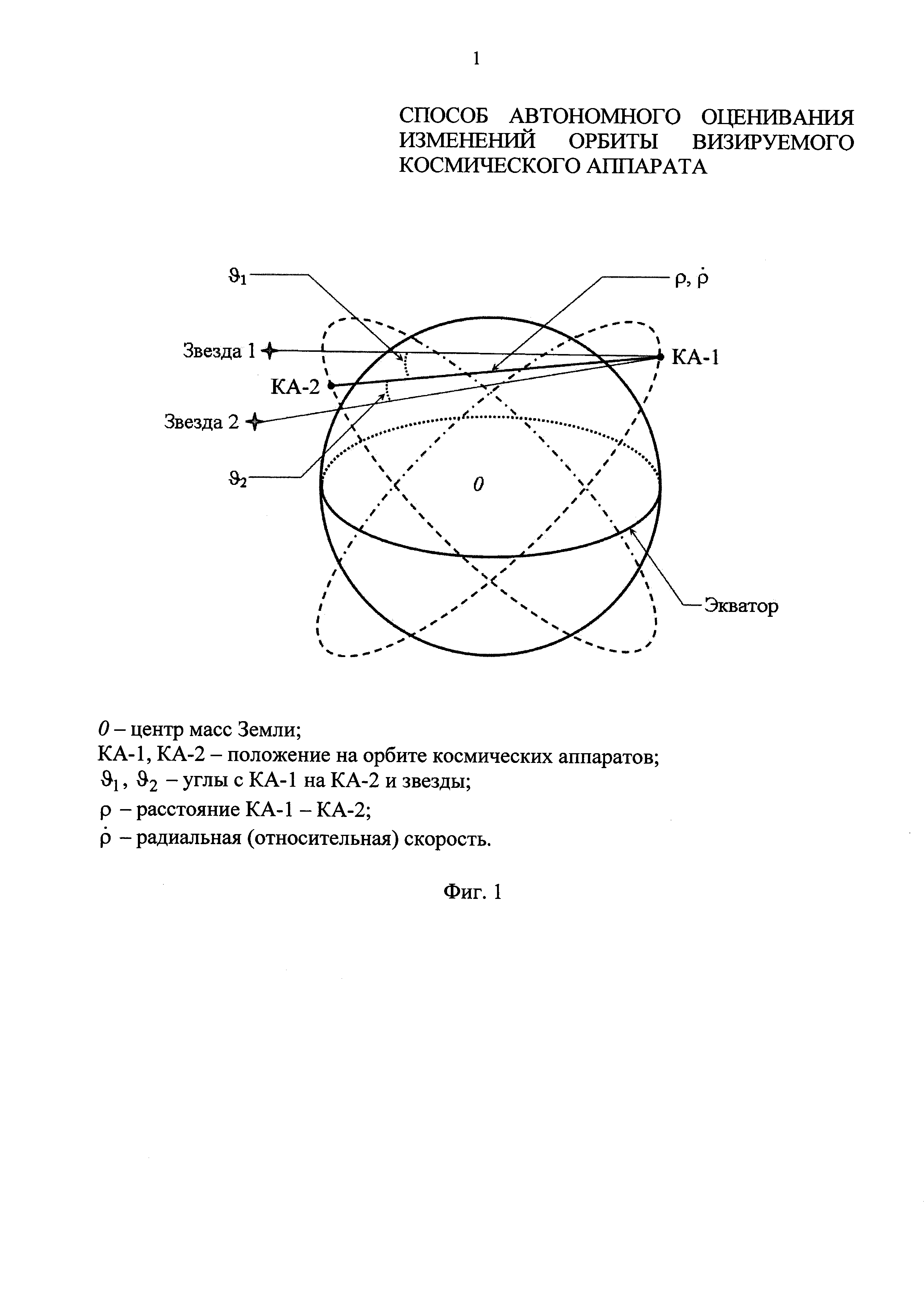
Известно, что относительно давно разработана теория и неоднократно проводилось моделирование так называемого взаимного способа автономной навигации КА [1, 2, 3], предусматривающего одновременное оценивание векторов состояний обоих аппаратов, участвующих в схеме "визирующий КА - визируемый КА" на основе измерений угла "КА-2 - наблюдаемая звезда", их относительных дальностей и скоростей (фиг. 1). При этом традиционно полагалось, что наблюдаемая звезда известна. В [1, 2, 3] рассматривался вариант измерения углов до двух звезд, подключение второй звезды на фоне измерения дальности и радиальной скорости значительного повышения точности навигационных определений не давало.
Однако, дальнейшее увеличение числа измеряемых углов (до пяти) позволило исключить измерение дальности и относительной скорости.
Если чувствительность визирующего ОЭП не ниже шестой звездной величины, а поле зрения составляет около 10°, то количество одновременно наблюдаемых звезд, как правило, составляет от 8 до 12 (при 15° - соответственно от 25 до 55), что позволяет осуществить их надежное распознавание и обеспечить одновременное измерение до пяти углов. Теоретически количество измеряемых углов может достигать числа распознанных звезд.
Успехи в развитии алгоритмов распознавания звезд позволяют на каждом измерительном сеансе решить задачу определения ориентации корпуса визирующего КА в различных ортогональных системах координат [4]. Кроме того, на основе идеи способа взаимной навигации стало возможным не только определить орбиту визируемого КА, но и установить факт ее изменения.
Взаимный способ предусматривает определение орбит не только обоих аппаратов, но и одного (любого) при известной орбите другого. В первом случае точности оценок орбит зависят друг от друга нелинейно, во втором - при повышении точности известной орбиты повышается точность и определяемой. Практически эти точности выравниваются, что способствует оперативному выявлению изменения оцениваемой орбиты.
Способ навигации, использующий измерение только углов "КА - звезда" (при известной орбите визирующего КА), назван авторами способом слежения.
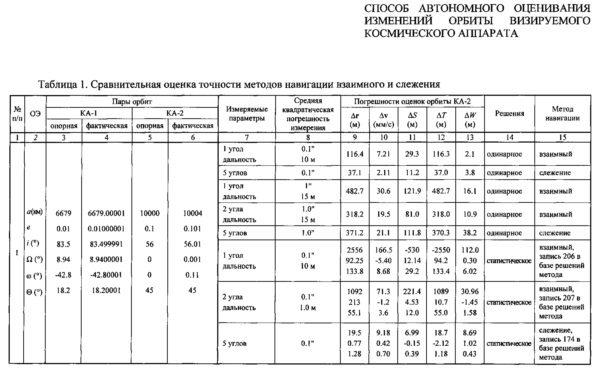
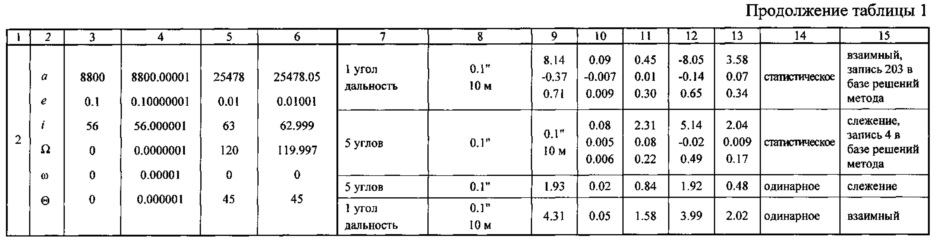
В таблице 1 показана сравнительная точность взаимного способа и способа слежения. Анализ этой таблицы дает основание полагать, что при средней квадратической погрешности (СКП) измерений в ОЭП порядка 0.1''-1'' измерение пяти углов в способе слежения показывает точности оценок орбиты КА несколько лучшие (иногда значительно), чем при дополнительном измерении дальности с СКП в 10-15 м и измерении одного или двух углов "КА - звезда" по алгоритму взаимного способа. По крайней мере, это справедливо для указанных пар орбит, как при одинарных решениях, так и в статистике.
Задача навигации в способе слежения решается с использованием метода наименьших квадратов (МНК), на основе расчета невязок измерений и частных производных от измеряемых параметров по оцениваемым. Полагаются априори известными приблизительные оценки орбиты КА-2 на некоторый момент времени, принимаемый за начало мерного интервала t=0, - опорная орбита (q0аn). Расчет поправок к ней и составляет суть решения задачи.
По известной орбите и рассчитанной ориентации КА-1, а также при наличии начальных приближений q0аn орбиты КА-2 рассчитывается линия визирования "КА-1-КА-2". При визировании на каждом навигационном сеансе измеряются приборные координаты наблюдаемых звезд, оценивается их звездная величина.
После осуществления измерений в течение мерного интервала, производится статистическая обработка результатов измерений, оценки параметров орбиты КА-2 итерационно корректируются:

причем на нулевой итерации (с=0) q00=40an. Поправки рассчитываются по следующему алгоритму [1, 2]:

где с - номер итерации;
j - номер навигационного сеанса;
n - число навигационных сеансов на мерном интервале;
 - градиентная матрица, т.е. матрица производных от текущей (на момент навигационного сеанса) измеряемой функции по начальным параметрам опорной орбиты q0c, i=1, …, m, i - номер навигационного параметра, m - размерность вектора измеряемых параметров;
- градиентная матрица, т.е. матрица производных от текущей (на момент навигационного сеанса) измеряемой функции по начальным параметрам опорной орбиты q0c, i=1, …, m, i - номер навигационного параметра, m - размерность вектора измеряемых параметров;
Gj - матрица производных от Lij текущим параметрам опорной орбиты;
 - матрица баллистических (изохронных) производных;
- матрица баллистических (изохронных) производных;
 - весовая матрица измерений, KLj - матрица вторых моментов погрешностей измерений на j-м навигационном сеансе;
- весовая матрица измерений, KLj - матрица вторых моментов погрешностей измерений на j-м навигационном сеансе;
ΔLj=Ljизм-Ljрасч - вектор невязок измерений, разность между вектор-функциями измеренных и рассчитанных по опорной орбите навигационных параметров;
q={r, v}, Δq0c={Δrс, Δvc}, где r - радиус-вектор положения КА, v - вектор скорости, Δrс и Δvc - поправки к ним.
Итерации завершаются при выполнении условия |Δq0c|<ε.
В имитационной модели способа слежения, реализующей решение навигационной задачи по алгоритму (1)-(2), размерность вектора измеряемых параметров изменяется в общем случае от одного до пяти. При увеличении количества углов от двух до пяти, точность оценок радиус-вектора возрастает в зависимости от рассмотренных пар орбит в среднем в три раза, а повышение точности оценок модуля вектора скорости достигает порядка.
При этом для уточнения орбиты КА-1 применяется способ автономной навигации по виртуальным измерениям зенитных расстояний звезд, также использующий измерения только в ОЭП. Точность последнего для любых орбит при погрешностях измерений порядка 0.1'' находится в пределах от 1 до 10 м по положению и от 1 до 10 мм/с по модулю вектора скорости [5, 6]. Решения навигационных задач проводились при 500 измерениях на мерном интервале на дату начала решений (выбиралась произвольно). Мерный интервал задается кратным времени одного оборота КА-2.
Отметим, что все расчеты проводились в среде разработанной авторами автоматизированной системы научных исследований методов и алгоритмов автономной навигации и ориентации КА, которая предусматривает широкие возможности построения процессов исследований и их анализа, в том числе различную тактику расчетов. Различают либо разовые (одинарные) решения задачи, при этом показателем точности является максимальная погрешность параметров орбит на всем мерном интервале, либо набор статистики решений, когда навигационная задача решается на 35 последовательных мерных интервалах. Статистические результаты представляются с учетом упомянутых максимальных погрешностей одинарных решений как максимум максиморум, математическое ожидание и среднеквадратическое отклонение погрешностей параметров орбит за весь набор решений. Каждый набор статистики оформляется в виде записи в базе решений с соответствующими комментариями [1, 2].
Возможность решения задачи слежения определяется взаимным расположением орбит аппаратов. На основе данных об опорных орбитах предварительно формируется множество отрезков мерного интервала, на которых КА-2 наблюдаем с борта КА-1, т.е. не затенен Землей, не засвечен Солнцем или Луной, и на которых, следовательно, возможны измерения. Такие отрезки называются навигационными. Прогноз успешного решения навигационной задачи по способу слежения полагается положительным, если суммарная длина навигационных отрезков TN составляет не менее 60% от мерного интервала Т, отрицательным - в случае ТN<0.3 Т. Иначе, когда 0.3 Т<TN<0.6 T, возможность решения задачи определяется расположением навигационных отрезков на мерном интервале; для положительного прогноза они должны располагаться как на его первой, так и на второй половине.
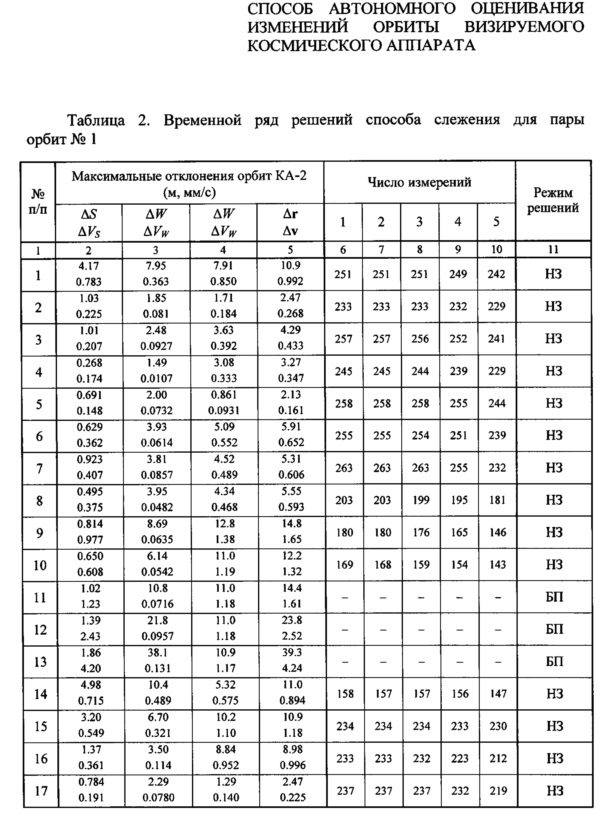
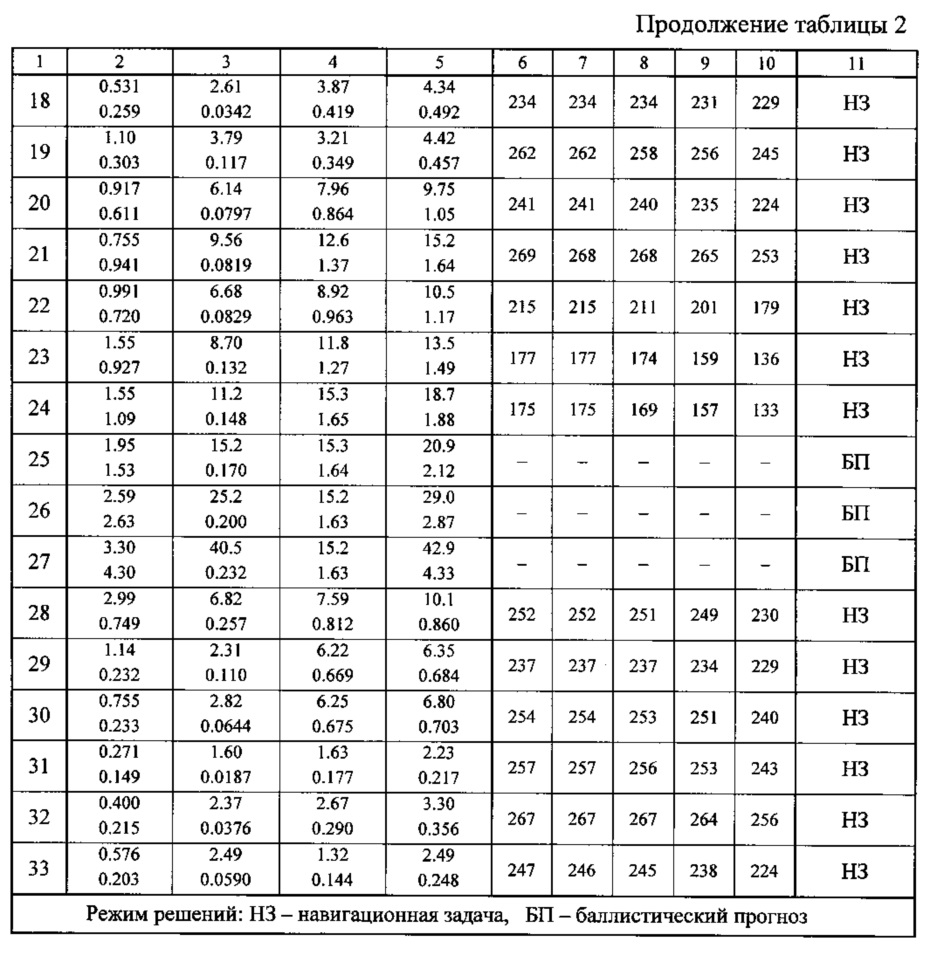
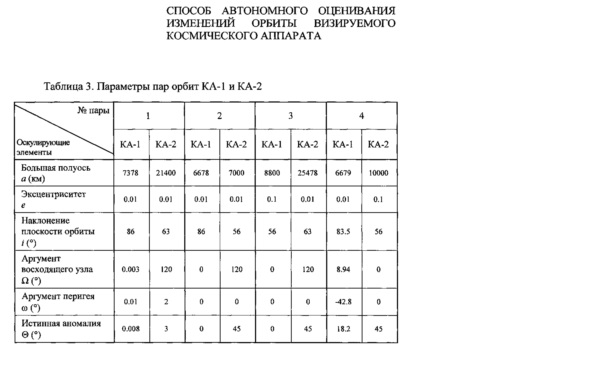
В таблице 2 представлены результаты моделирования способа слежения в течение 33 витков КА-2 для пары орбит №1, параметры которых содержатся в таблице 3. Как видно, алгоритм предварительного анализа возможности решения навигационной задачи вырабатывал отрицательный результат шесть раз: витки 11-13 и 25-27. На этих витках осуществлялся баллистический расчет орбиты КА-2, причем без значительного понижения точностей ее оценок, что стало возможным благодаря высоким точностным характеристикам способа слежения.
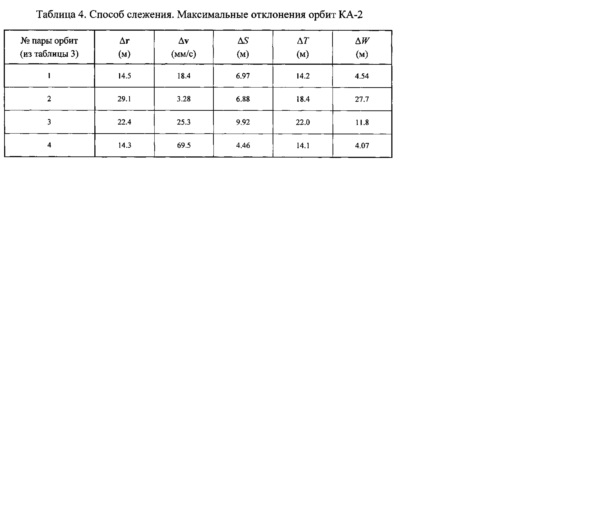
В таблице 4 представлены максимальные погрешности определения орбит КА-2 этим способом при однократных решениях для пар орбит, начальные параметры которых описаны в таблице 3. Высокая и стабильная точность навигационных определений говорит в пользу способа слежения, который представляется перспективным для использования в системах автономной навигации и ориентации.
При слежении за КА-2 на каждом навигационном сеансе мерного интервала наблюдаемые в ОЭП звезды распознаются [4, 7]. Распознавание может быть осуществлено как с использованием опорной орбиты КА-2 [7], так и без нее [4], но всегда на основе расчета матрицы угловых расстояний между звездами.
После распознавания звезд в ОЭП-1 определяется ориентация корпуса КА-1 в ГЭИСК. Для этого первоначально по рассчитанным на основе измерений ортам наблюдаемых звезд в приборной системе координат (ПСК) и известными после распознавания геоцентрическими ортами этих звезд определяется ориентация ОЭП в ГЭИСК, исходя из известного положения о том, что при переходе из одной ортогональной системы координат в другую угловые расстояния между векторами сохраняются.
Поэтому на основе равенства угловых расстояний между ортами наблюдаемых звезд и осями ОЭП в ПСК, с одной стороны, и между направляющими косинусами распознанных звезд и осями ОЭП в ГЭИСК - с другой, можно определить ориентацию осей ξ, η, ζ ПСК в ГЭИСК путем решения трех систем Q линейных уравнений с тремя неизвестными:
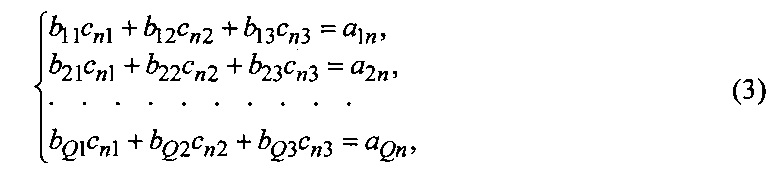
где bk=(bk1, bk2, bk3) - направляющие косинусы звезд в ГЭИСК, k=1, …Q, Q - количество распознанных звезд;
аk=(ак1, аk2, аk3) - направляющие косинусы звезд в ПСК;
сn=(сn1, сn2, сn3) - искомый вектор направляющих косинусов оси ОЭП в ГЭИСК, n=1 отвечает оси ξ, n=2 - оси η и n=3 - оси ζ.
Каждая из систем условных уравнений вида (3) решается с помощью МНК, ее решением является такой вектор сn, который минимизирует длину вектора невязки (разности правой и левой частей системы), т.е.

После расчета частных производных функции (4) с учетом  составляется система нормальных уравнений
составляется система нормальных уравнений

при этом B=(Вij),  ; A=(Aj),
; A=(Aj),  , i, j=1, 2, 3.
, i, j=1, 2, 3.
Из формулы (5), после обращения матрицы B, находится искомый вектор

Из векторов сn, полученных согласно (3)-(6), составляется матрица
M1={mnj}, mnj=cnj, n, j=1, 2, 3, которая является матрицей координат ортов осей ПСК в ГЭИСК.
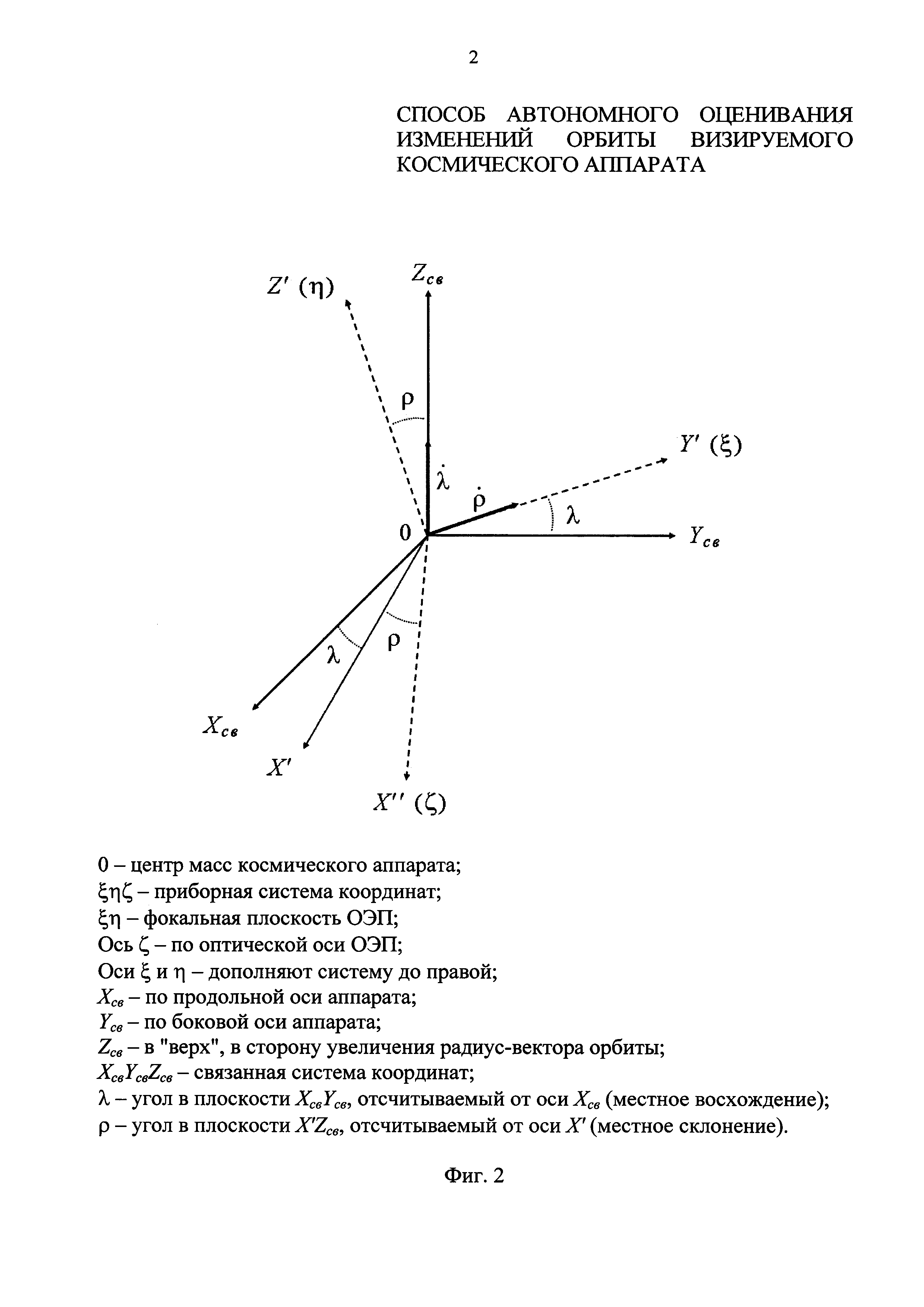
По известным значениям углов закрепления ОЭП-1 λ и ρ (фиг. 2), формируется матрица перехода из связанной системы координат (ССК) в ПСК [1, 2]:
Матрица
является матрицей перехода из ГЭИСК в ССК. Искомые орты осей КА-1 в ГЭИСК - соответственно первая, вторая и третья строки матрицы М3.
Далее рассчитываются углы ориентации линии визирования в ССК КА-1. По известным координатам КА-1 (x1, y1, z1) и опорным координатам КА-2 (х2, y2, z2) определяется орт линии визирования в ГЭИСК а(ах, ау, а2):
 ,
,  ,
,  ,
,
где  .
.
Вектор направляющих косинусов линии визирования в ССК  рассчитывается таким образом:
рассчитывается таким образом:
Углы между вектором а' и осями Хсв и Zcв ССК равны λ1=arccos ,
,  . Значения λ1, ρ1 подаются на двигатели рамок карданова подвеса для физического ориентирования оптической оси ОЭП-2 в точку нахождения КА-2.
. Значения λ1, ρ1 подаются на двигатели рамок карданова подвеса для физического ориентирования оптической оси ОЭП-2 в точку нахождения КА-2.
Способ слежения содержит и алгоритм решения задачи оперативного определения фактов изменений орбиты КА-2, причем эти изменения могут быть относительно незначительными.
Эти факты устанавливаются надежно при условии высокоточного решения навигационной задачи по способу слежения (порядок единиц, десятка метров по положению и, соответственно, единиц, десятка мм/с по модулю вектора скорости), что, в свою очередь, предполагает и аналогичную точность выработки оценок орбиты КА-1.
Разработаны два способа решения задачи определения фактов изменения орбиты КА-2 на основе анализа динамики сумм поправок к опорной орбите по радиус-вектору (Δr), по модулю вектора скорости (Δv) и суммы модулей невязок измерений (μ) за мерный интервал. Анализируемые величины рассчитываются в процессе решения навигационной задачи по алгоритму (1)-(2):

Первый способ аналогичен традиционному набору статистики. Разработаны два варианта его реализации. По первому варианту анализируются поправки Δr на текущем мерном интервале в отношении к этому показателю на двух предшествующих интервалах (первый критерий) и текущая сумма невязок μ в сравнении с аналогичной суммой на предыдущем интервале (второй критерий). По второму варианту - Δr, Δv (первый критерий) и μ (второй критерий) в соотношениях с аналогичными суммами, полученными на предыдущем мерном интервале.
Для оценки факта импульса предусмотрены два режима расчетов - совместный (режим А) и раздельный (режим Б). В режиме А при завершении текущего мерного интервала импульс фиксируется, когда оба критерия превышают установленные пороги, при режиме Б принимается в расчет превышение соответствующего порога только одним из критериев.
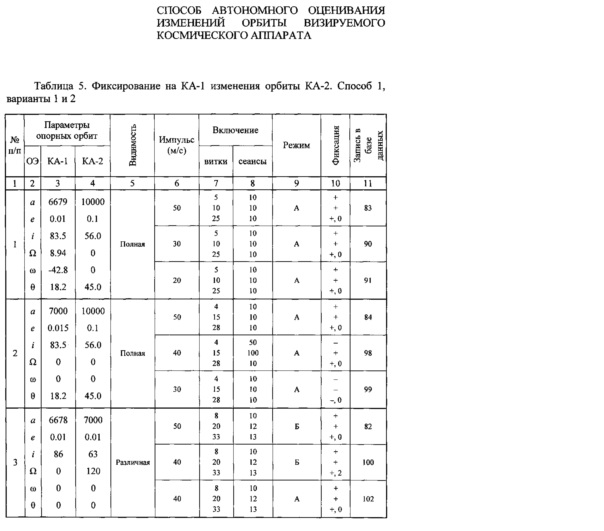
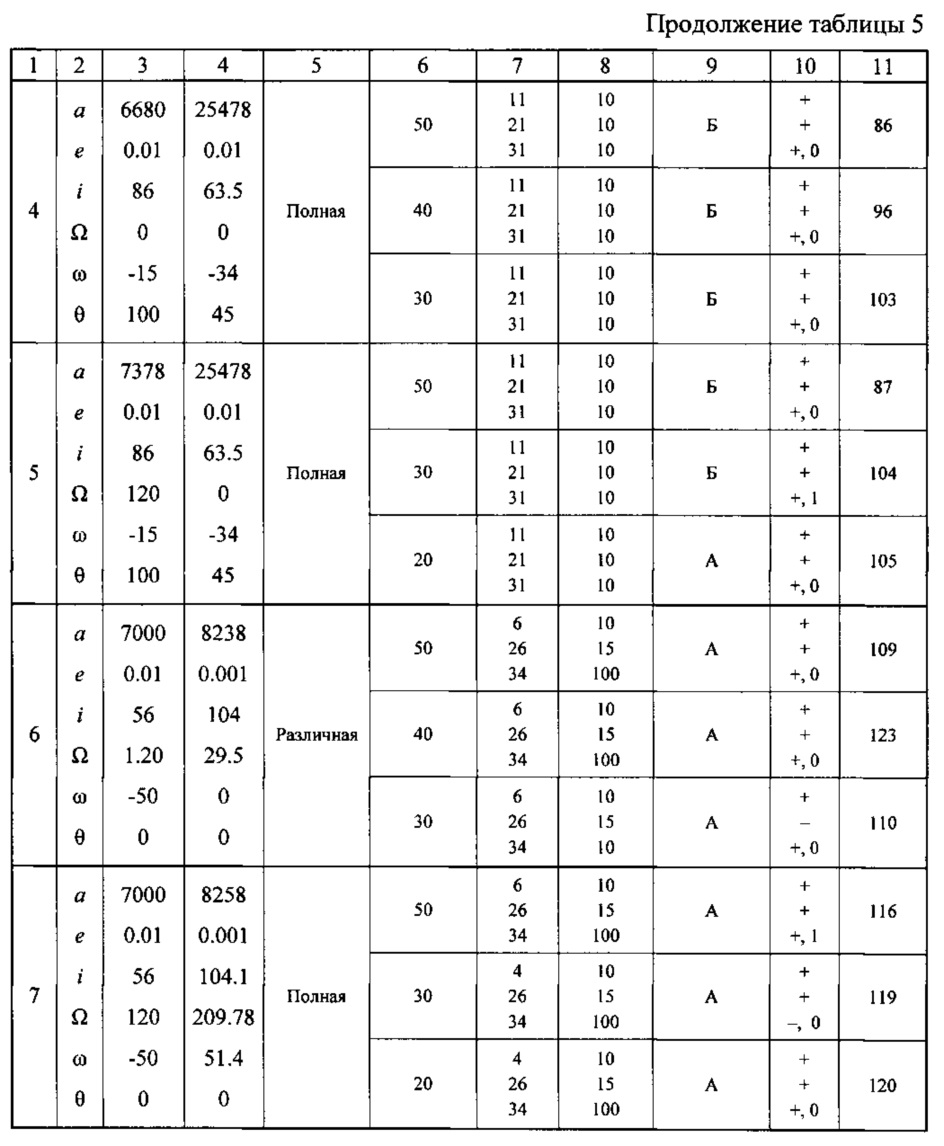
На основе опыта моделирования были выбраны диапазоны значений
порогов: для первого критерия - в пределах от 2.0 до 3.0, для второго - от 1.25 до 2.5, в зависимости от пары орбит. Результаты фиксации фактов изменения орбиты КА-2 по первому способу представлены в таблице 5. В графе "Фиксация" знаком "+" отмечен формируемый алгоритмом сигнал успешного определения факта изменения орбиты. После запятой указано количество ложных сигналов во всей статистике из 35 решений соответствующей записи базы решений. В графе "Видимость" отмечается интегрированная характеристика возможности решения навигационной задачи по всем мерным интервалам данной записи. "Различная" означает, что часть решений вынужденно была заменена баллистическим прогнозом, в этом случае возможное изменение орбиты КА-2 не могло быть установлено.
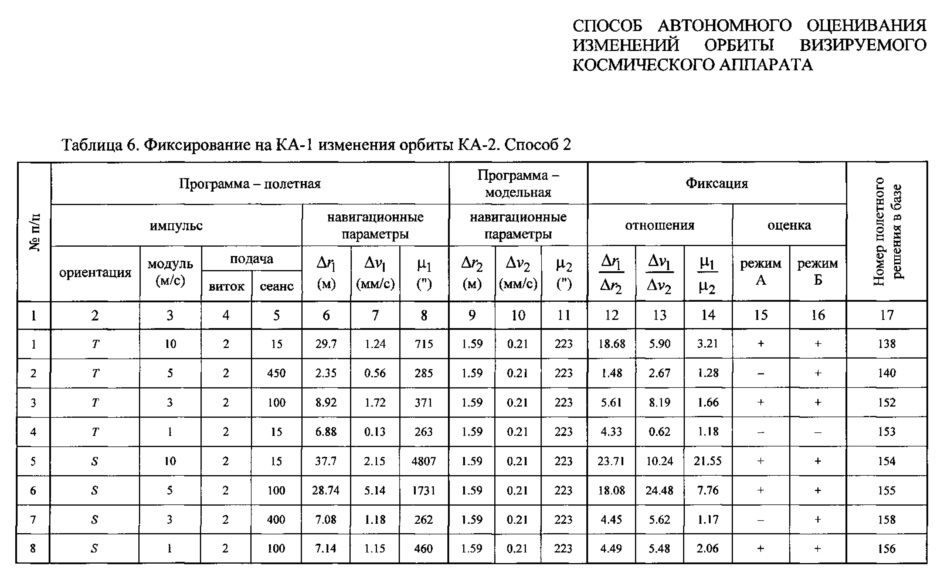
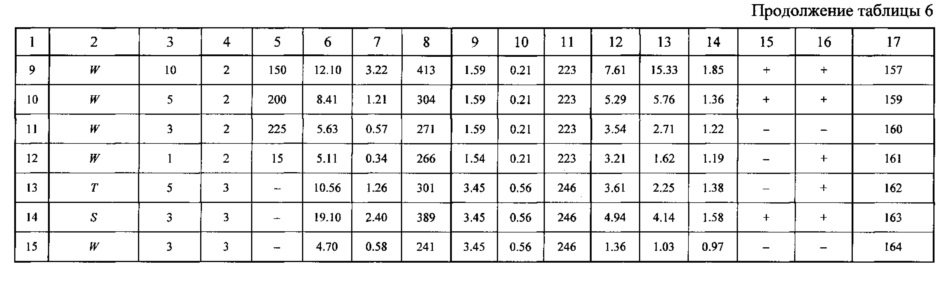
Второй способ разработан с использованием двух параллельно работающих программ. Первая из них, называемая полетной, осуществляет расчет уточненной опорной орбиты (УОО) КА-2 согласно (1)-(2) на основе начальных априорных данных об этой орбите и модели бортовых измерений. Полагается, что в реальных условиях полета модель измерений в этой программе будет заменена реальными измерениями в условиях возможных фактических изменений орбиты КА-2. Вторая программа, модельная, реализует исключительно модельный алгоритм, но в ней опорная и истинная орбиты представляются выработанной в полетной программе УОО, на основе которой моделируются измерения; импульсы, подаваемые для изменения орбиты КА-2, в ней отсутствуют.
В динамике набора статистики взаимодействие полетной и модельной программ представляется следующим. В течение первого мерного интервала работает только полетная программа, рассчитывающая УОО. На втором и последующих интервалах обе программы функционируют параллельно. Модельная программа в процессе решения навигационной задачи вырабатывает базовые значения описанных в (7) критериев, с которыми сравниваются результаты аналогичных расчетов полетной программы. При превышении их по первому критерию в три и более раза, по второму критерию в 1.25 и более раз фиксируется факт изменения орбиты КА-2.
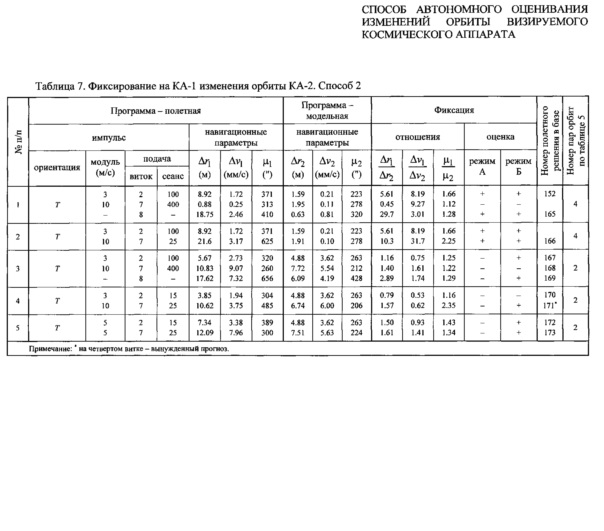
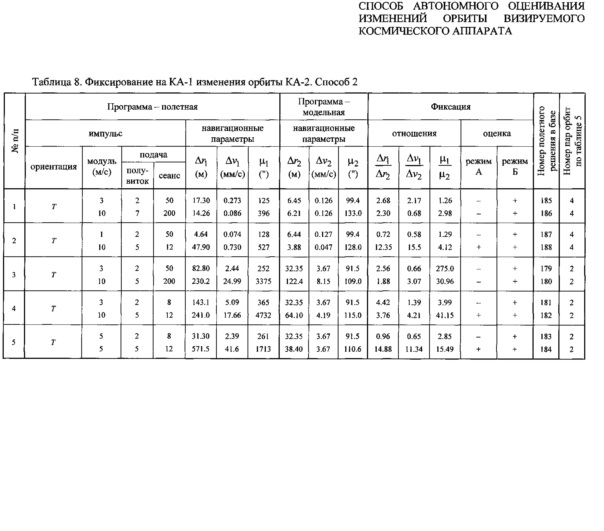
Результаты расчетов по этому способу представлены в таблицах 6, 7 и 8. Таблица 6 составлена для четвертой пары, таблица 7 - для второй и четвертой пар орбит из таблицы 5. Таблицы 5, 6 и 7 составлены для мерного интервала в один виток, таблица 8 - в полвитка.
Анализ таблиц 5, 6, 7 и 8 показывает, что первый способ, более простой для программной реализации, позволяет уверенно определять изменение орбиты КА-2 лишь при импульсах в 20 м/с и более, но требует тонкой настройки порогов, в зависимости от пар орбит, для исключения ложных сигналов. Второй способ гораздо чувствительнее к величине импульса (1-3 м/с) и практически гарантирован от ложных сигналов, поскольку в нем на каждом мерном интервале сравниваются два решения задачи фактически по одному и тому же алгоритму с близкими исходными данными. При отсутствии импульсов значения критериев будут близки, а их отношения - далеки от пороговых значений. Однако по сравнению с первым этот способ требует значительного усложнения программы.
Время фиксации импульса зависит от момента его подачи относительно начала мерного интервала. Если этот момент выпадает на первую половину или середину интервала, импульс фиксируется по его окончанию, в противном случае - в течение следующего интервала или, в крайнем случае, по его завершению (см. строки 2 и 13, 7 и 14, 11 и 15 таблицы 6).
Отметим, что таблица 6 составлена для одной пары орбит, но для различных направлений единственного импульса. Таблица 7 - для двух одинаковых по направлению импульсов, выдаваемых в разное время на одних и тех же мерных интервалах, но для различных, значительно отличающихся друг от друга пар орбит. Таблицы 3 и 5 содержат весь диапазон рассмотренных пар, содержащих орбиты с высотами от 250 до 20000 км, эксцентриситетами - от 0.01 до 0.1, наклонениями - от 56° до 104°.
Таким образом, данные таблиц 1-8 отражают результаты экспериментальной проверки реализации изобретения.
Для второго способа оценивания из рассмотренных критериев и режимов расчета наиболее предпочтителен критерий μ, содержащий модули невязок измерений, доставляющий наибольшее число определений факта импульса без привлечения других критериев, т.е. режим Б. Для первого способа предпочтительны вариант 2 и режим А, т.е. совместное использование всех трех критериев (7).
Из изложенного следует, что предлагаемый способ слежения, основанный на пассивных межспутниковых астроизмерениях, обеспечивает оперативное определение факта изменения орбиты КА-2, решение задач высокоточных определений орбиты КА-2, ориентации корпуса КА-1 и линии визирования в различных системах координат.
Технический результат изобретения заключается в исключении активных измерений дальности и радиальной скорости, увеличении при этом точности оценок орбиты КА-2, в расчете углов физического ориентирования оптической оси визирующего ОЭП и в возможности реализации новой функции системы автономной навигации и ориентации - выявлении на борту КА-1 факта изменения орбиты визируемым КА-2.
Осуществимость изобретения следует из того, что оно основано на использовании ОЭП и карданова подвеса, давно освоенных промышленностью.
Технико-экономическая эффективность изобретения заключается в уменьшении весогабаритных характеристик требуемых измерителей, определении подачи импульса визируемым КА-2 без привлечения средств контроля космического пространства и наземного комплекса управления.
Источники информации
1. Кузнецов В.И., Данилова Т.В. Автоматизированная система исследований методов и алгоритмов автономной навигации и ориентации космических аппаратов. Учебное пособие, СПб., ВКА им. А.Ф. Можайского, 2006 г., 322 с.
2. Кузнецов В.И. Автоматизированная система научных исследований методов и алгоритмов автономной навигации и ориентации космических аппаратов. Монография, СПб., ВКА им. А.Ф. Можайского, 2010 г., 453 с.
3. Кузнецов В.И., Данилова Т.В. Моделирование метода взаимной навигации космических аппаратов: новые результаты, СПб., Известия ВУЗов, Приборостроение, 2005 г., т. 48, №10, с. 20-27.
4. Данилова Т.В., Архипова М.А. Определение ориентации корпуса космического аппарата в геоцентрической экваториальной инерциальной системе координат на основе астроизмерений при отсутствии данных о параметрах орбиты, СПб., Известия ВУЗов, Приборостроение, 2013 г., т. 56, №7, с. 13-20.
5. Кузнецов В.И., Данилова Т.В. Система автономной навигации и ориентации ИСЗ, основанная на виртуальных измерениях зенитных расстояний звезд, М., Космические исследования, 2011 г., т.49, №6, с. 551-562.
6. Патент на изобретение №2454631 "Способ автономной навигации и ориентации космических аппаратов на основе виртуальных измерений зенитных расстояний звезд". Авторы: Кузнецов В.И., Данилова Т.В., Косулин Д.М. Приоритет изобретения 28 октября 2010 г.
7. Кузнецов В.И., Данилова Т.В. Алгоритмы распознавания "рабочих" звезд по звездному полю, СПб., Известия ВУЗов, Приборостроение, 2003 г., т. 46, №4, с. 16-23.
Вентиль
Узел пары заслонка и седло регулятора расхода горячего газа
Дренажно-предохранительный клапан бака окислителя
Устройство для фиксации отделяемых в процессе эксплуатации частей изделия от корпуса
Вращающийся обтекатель антенн на самолете
Бак топливный космического аппарата для хранения и подачи жидких компонентов
Лазерный целеуказатель
Трехфазный инвертор напряжения с трансформаторным выходом
Способ повышения эффективности наведения на подводную цель корректируемого подводного снаряда противолодочного боеприпаса и устройство для его реализации
Раскрываемый руль ракеты
Вентиль
Узел пары заслонка и седло регулятора расхода горячего газа
Дренажно-предохранительный клапан бака окислителя
Устройство для фиксации отделяемых в процессе эксплуатации частей изделия от корпуса
Вращающийся обтекатель антенн на самолете
Бак топливный космического аппарата для хранения и подачи жидких компонентов
Лазерный целеуказатель
Трехфазный инвертор напряжения с трансформаторным выходом
Кольцевое движительное устройство
Способ повышения эффективности наведения на подводную цель корректируемого подводного снаряда противолодочного боеприпаса и устройство для его реализации

