Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ, СПОСОБ ИЗМЕРЕНИЯ СОТЫ, УСТРОЙСТВО И УЗЕЛ СВЯЗИ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к области технологий связи и, в частности, к способу измерения, способу измерения соты, устройству и узлу связи.
Уровень техники
В области связи для выполнения управления мобильностью на пользовательском устройстве (UE) необходимо измерить параметры радиоканала, с тем, чтобы оценить в соответствии с результатом измерения качество сигнала, принятого из соты пользовательским устройством. В настоящее время опорная сигнализация для измерения, в основном, включает в себя опорный сигнал конкретной соты (CRS) и опорный сигнал информации состояния канала (CSI-RS).
В существующем способе измерения сетевая сторона доставляет информацию управления измерением (управление измерением) в UE для регулирования процедуры измерения и критерия отчетности об измерении пользователя; UE измеряет соседнюю соту на допуск к соте и сообщает результат на сетевую сторону, который соответствует критерию отчетности в виде отчета об измерении, где отчет об измерении включает в себя идентификацию соты, соответствующая критерию отчетности. Сетевая сторона выполняет управление мобильностью (например, принятие решение о передаче обслуживания) UE в соответствии с результатом измерения, который направило UE. В существующем способе измерения опорная сигнализация (CRS или CSI-RS) строго соответствует типу измерения, и сетевая сторона избыточно не препятствует процедуре измерения UE. Однако с развитием технологий связи внедряются обратно не совместимая сота или несущая, такая как новый тип несущей (NCT) соты или несущей, и существующий способ измерения больше не применим.
Раскрытие изобретения
Варианты осуществления настоящего изобретения обеспечивают способ измерения, способ измерения соты, устройство и узел связи, при условии, что внедрен способ измерения радиоканала обратно не совместимой соты или несущей.
Для решения вышеупомянутой технической задачи варианты осуществления настоящего изобретения раскрывают следующие технические решения:
Первый аспект обеспечивает способ измерения, где способ измерения включает в себя этапы, на которых:
передают с помощью первого узла связи информацию об измерениях во второй узел связи, где измерительная информация включает в себя информацию о конфигурации измерительного сигнала и/или информацию о конфигурации комбинации измерительных сигналов, при этом информация о конфигурации комбинации измерительных сигналов используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации измерительного сигнала, а информация о конфигурации комбинации измерительных сигналов используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации комбинации измерительных сигналов; и
принимают с помощью первого узла связи отчета об измерениях, переданного вторым узлом связи, где отчет об измерениях несет результат измерения, выполненного вторым узлом связи согласно информации об измерениях.
В первом возможном способе реализации первого аспекта,
измерительный сигнал является опорным сигналом обнаружения (DRS) и комбинация измерительных сигналов является комбинацией DRS и по меньшей мере одним из опорный сигнал (CRS) конкретной соты, переданный в полном субкадре, CRS, переданный в частичном субкадре, сигнал (SS) синхронизации и опорный сигнал (CSI-RS) информации о состоянии канала или комбинацией по меньшей мере двух из CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS и CSI-RS.
Со ссылкой на первый аспект или первый возможный вариант реализации первого аспекта, во втором возможном варианте реализации способа информации о конфигурации измерительного сигнала включает в себя по меньшей мере одно из следующих:
информацию о конфигурации ресурса частотного домена, информацию о конфигурации ресурса домена кода, информацию о конфигурации субкадра, информацию пространственного домена и информацию шаблона на блоке ресурсов.
Со ссылкой на первый аспект или первый или второй возможный вариант реализации способа по первому аспекту, в третьем возможном варианте реализации способа информация о конфигурации измерительного сигнала включает в себя информацию о конфигурации DRS.
Со ссылкой на первый аспект или первый или второй или третий возможный вариант реализации способа по первому аспекту, в четвертом возможном варианте реализации способа информация об измерении дополнительно включает в себя: отображение отношений между информацией о конфигурации DRS и CSI-RS.
Со ссылкой на первый аспект или первый или второй или третий или четвертый возможный вариант реализации способа по первому аспекту, в пятом возможном варианте реализации способа информация о конфигурации DRS включает в себя по меньшей мере одно из следующих:
информацию порта антенны, информацию о конфигурации ресурса частотного домена, информацию о конфигурации ресурса домена кода, информацию о конфигурации субкадра, информацию шаблона на блоке ресурсов и соотношение мощности передачи физического общего канала нисходящей линии связи (PDSCH) к тому же DRS.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый возможный вариант реализации способа по первому аспекту, в шестом возможном варианте реализации способа информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой возможный вариант реализации способа по первому аспекту, в седьмом возможном варианте реализации способа информация о конфигурации DRS дополнительно включает в себя: информацию синхронизации, где информация синхронизации включает в себя по меньшей мере одно из следующих: сдвиг числа радиокадра, сдвиг субкадра и сдвиг временного символа.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой возможный вариант реализации способа по первому аспекту, в восьмом возможном варианте реализации способа информация о конфигурации измерительного сигнала включает в себя: информацию о конфигурации CRS, переданную в частичном субкадре, где информация о конфигурации CRS, переданная в частичном субкадре, включает в себя одно из следующих:
информацию о конфигурации ресурса частотного домена, информацию о конфигурации субкадра, информацию шаблона на блоке ресурсов, где информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой возможный вариант реализации способа по первому аспекту, в девятом возможном варианте реализации способа
информация измерения дополнительно включает в себя: идентификацию соседней соты или идентификационную информацию третьего узла связи, где третий узел связи является смежным с первым узлом связи.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый возможный вариант реализации способа по первому аспекту, в десятом возможном варианте реализации способа информация измерения дополнительно включает в себя: тип измерительного сигнала.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый возможный вариант реализации способа по первому аспекту, в одиннадцатом возможном варианте реализации способа тип измерительного сигнала включает в себя одно из следующих:
измерение всего набора CRS, измерение ограниченного CRS, CSI-RS измерение, DRS измерение, CRS и DRS гибридное измерение, CSI-RS и DRS гибридное измерение, CRS и CSI-RS гибридное измерение, DRS, CRS и CSI-RS гибридное измерение.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый возможный вариант реализации способа по первому аспекту, в двенадцатом возможном варианте реализации способа информация об измерении дополнительно включает в себя: информацию о конфигурации типа измерения.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый возможный вариант реализации способа по первому аспекту, в тринадцатом возможном варианте реализации способа, если отчет об измерениях несет результат измерения, соответствующий DRS ресурсу, измерение, выполняется с использованием DRS, и затем первый узел связи принимает отчет об измерениях, переданный вторым узлом связи, способ дополнительно включает в себя: передачу информации о конфигурации CRS и/или информации о конфигурации CSI-RS во второй узел связи.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый возможный вариант реализации способа по первому аспекту, в четырнадцатом возможном варианте реализации способа информация измерения дополнительно включает в себя: информацию о конфигурации отчета, используемую для указания способа отправки измерительного отчета вторым узлом связи.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый возможный вариант реализации способа по первому аспекту, в пятнадцатом возможном варианте реализации способа информация о конфигурации отчета дополнительно включает в себя:
значение периода отчетности результата измерения второго узла связи с нижнего уровня на верхний уровень; или
значение количества измерительных сигналов в результата измерения, направленного вторым узлом связи с нижнего уровня до верхнего уровня.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый возможный вариант реализации способа по первому аспекту, в шестнадцатом возможном варианте реализации способа информация о конфигурации отчета включает в себя значение периода отчетности результата измерения второго узла связи с нижнего уровня на верхний уровень.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый или шестнадцатый возможный вариант реализации способа по первому аспекту, в семнадцатом возможном варианте реализации способа информация о конфигурации измерительного сигнала дополнительного включает в себя по меньшей мере один набор информации о конфигурации GAP, где:
информация о конфигурации GAP включает в себя: период начала GAP, исходную позицию и длину одного или более GAPs; или
информация о конфигурации GAP включает в себя информацию шаблона GAP конфигурации; или
информация о конфигурации GAP включает в себя значение количества измеряемых измеренных сигналов.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый или шестнадцатый или семнадцатый возможный вариант реализации способа по первому аспекту, в восемнадцатом возможном варианте реализации способа информация о конфигурации GAP дополнительно включает в себя по меньшей мере одно из следующих: тип измерительного сигнала, соответствующий каждому набору информации о конфигурации GAP и частоту и/или информацию системы, соответствующая каждому набору информация о конфигурации GAP.
Со ссылкой на первый аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый или шестнадцатый или семнадцатый или восемнадцатый возможный вариант реализации способа по первому аспекту, в девятнадцатом возможном варианте реализации способ дополнительно включает в себя этап, на котором: получают с помощью первого узла связи через интерфейс Х2, радио интерфейс между двумя базовыми станциями или ОАМ информацию о конфигурации, используемую для получения информации измерения соседней соты.
Второй аспект обеспечивает способ измерения, при этом способ измерения включает в себя:
прием вторым узлом связи информации измерения, переданной первым узлом связи, где информация измерения включает в себя информацию о конфигурации измерительного сигнала и/или информацию о конфигурации комбинации измерительных сигналов, информация о конфигурации измерительного сигнала используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации измерительного сигнала, и информация о конфигурации комбинации измерительных сигналов используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации комбинации измерительных сигналов;
определение вторым узлом связи согласно информации о конфигурации измерительного сигнала в информации измерения ресурса измерительного сигнала, соответствующего информации о конфигурации измерительного сигнала, и/или определение согласно информации о конфигурации комбинации измерительных сигналов в информации измерении ресурса измерительного сигнала, соответствующего информации о конфигурации комбинации измерительных сигналов; и измерение измерительного сигнала, соответствующего ресурсу для получения результата измерения; и
отправку вторым узлом связи результата измерения в первый узел связи.
В первом возможном варианте реализации второго аспекта измерительный сигнал является опорным сигналом обнаружения (DRS) и комбинация измерительных сигналов является комбинацией DRS и по меньшей мере один опорный сигнал конкретной соты (CRS), переданный в полном субкадре, CRS, переданный в частичном субкадре, сигнал (SS) синхронизации и опорный сигнал информации о состоянии канала (CSI-RS) или комбинация по меньшей мере двух из CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS и CSI-RS; и
второй узел связи дополнительно выполнен с возможностью определения согласно измерительному сигналу или информации конфигурации измерительного сигнала, сигнала который должен быть измерен, и измеряя сигнал, подлежащий измерению, получать результат измерения.
Со ссылкой на второй аспект или первый возможный вариант реализации второго аспекта, во втором возможном варианте реализации
информация о конфигурации измерительного сигнала включает в себя по меньшей мере одно из следующих:
информацию о конфигурации ресурса частотного домена, информацию о конфигурации домена кода, информацию о конфигурации субкадра, информацию пространственного домена и информацию шаблона на блоке ресурсов.
Со ссылкой на второй аспект или первый или второй возможный вариант реализации второго аспекта, в третьем возможном варианте реализации информация о конфигурации измерительного сигнала включает в себя информацию конфигурации DRS.
Со ссылкой на второй аспект или первый или второй или третий возможный вариант реализации второго аспекта, в четвертом возможном варианте реализации информация измерения дополнительно включает в себя: отображение отношений между информацией о конфигурации DRS и CSI-RS.
Со ссылкой на второй аспект или первый или второй или третий или четвертый возможный вариант реализации второго аспекта, в пятом возможном варианте реализации информация о конфигурации DRS включает в себя по меньшей мере одно из следующих:
информацию порта антенны, информацию о конфигурации ресурса частотного домена, информацию о конфигурации домена кода, информацию о конфигурации субкадра, информацию шаблона на блоке ресурсов, соотношение мощности передачи физического общего канала нисходящей линии связи (PDSCH) к тому DRS.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый возможный вариант реализации второго аспекта, в шестом возможном варианте реализации информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой возможный вариант реализации второго аспекта, в седьмом возможном варианте реализации информация о конфигурации DRS дополнительно включает в себя: информацию синхронизации, где информация синхронизации включает в себя по меньшей мере одно из следующих: сдвиг числа радио кадра, сдвиг субкадра и сдвиг временного символа.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой возможный вариант реализации второго аспекта, в восьмом возможном варианте реализации информация о конфигурации измерительного сигнала включает в себя: информацию о конфигурации CRS, переданную в частичном субкадре, где информация о конфигурации CRS, переданная в частичном субкадре, включает в себя по меньшей мере одно из:
информации о конфигурации ресурса частотного домена, информации о конфигурации субкадра, информации шаблона на блоке ресурсов, где информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой возможный вариант реализации второго аспекта, в девятом возможном варианте реализации информация измерения дополнительно включает в себя: идентификацию соседней соты.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый возможный вариант реализации второго аспекта, в десятом возможном варианте реализации информация измерения дополнительно включает в себя: тип измерительного сигнала.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый возможный вариант реализации второго аспекта, в одиннадцатом возможном варианте реализации тип измерительного сигнала включает в себя по меньшей мере одно из: измерения всего набора CRS, измерения ограниченного CRS, CSI-RS измерения, DRS измерения, CRS и DRS гибридного измерения, CSI-RS и DRS гибридного измерения, CRS и CSI-RS гибридного измерения, DRS, CRS и CSI-RS гибридного измерения.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый возможный вариант реализации второго аспекта, в двенадцатом возможном варианте реализации информация измерения дополнительно включает в себя: информацию о конфигурации типа измерения.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый возможный вариант реализации второго аспекта, в тринадцатом возможном варианте реализации, если отчет измерения передает результат измерения, соответствующий DRS ресурсу, измерение, выполненное с использованием DRS, и затем узел связи принимает отчет измерения, переданный вторым узлом связи, способ дополнительно включает в себя: передачу информации о конфигурации CRS и/или информации о конфигурации CSI-RS во второй узел связи.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый возможный вариант реализации второго аспекта, в четырнадцатом возможном варианте реализации информация измерения дополнительно включает в себя: информацию о конфигурации отчета, используемую для указания способа отправки отчета измерения вторым узлом связи.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый возможный вариант реализации второго аспекта, в пятнадцатом возможном варианте реализации информация о конфигурации отчета дополнительно включает в себя:
значение периода отчетности результата измерения второго узла связи с нижнего уровня на верхний уровень; или
значение количества измерительных сигналов в результате измерения, направленного вторым узлом связи с нижнего уровня до верхнего уровня.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый возможный вариант реализации второго аспекта, в шестнадцатом возможном варианте реализации информация о конфигурации отчета включает в себя значение периода отчетности результата измерения второго узла связи с нижнего уровня на верхний уровень.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый или шестнадцатый возможный вариант реализации второго аспекта, в семнадцатом возможном варианте реализации информация о конфигурации измерительного сигнала дополнительно включает в себя по меньшей мере один набор информации о конфигурации GAP, где:
информация о конфигурации GAP включает в себя: период начала GAP, исходную позицию и длину одного или более GAPs; или
информация о конфигурации GAP включает в себя информацию шаблона GAP конфигурации; или
информация о конфигурации GAP включает в себя значение количества измеряемых измеренных сигналов.
Со ссылкой на второй аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый или шестнадцатый или семнадцатый возможный вариант реализации второго аспекта, в восемнадцатом возможном варианте реализации информация о конфигурации GAP дополнительно включает в себя одно из:
типа измерительного сигнала, соответствующего каждому набору информации о конфигурации GAP и частоты и/или информации системы, соответствующей каждому набору информации о конфигурации GAP.
Третий аспект обеспечивает устройство измерения, расположенное на первом узле связи и включающем в себя:
первый блок передачи, выполненный с возможностью передачи информации измерения на второй узел связи, где информация измерения включает в себя информацию о конфигурации измерительного сигнала и/или информацию о конфигурации комбинации измерительных сигналов, информация о конфигурации измерительного сигнала используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации измерительного сигнала, и информация о конфигурации комбинации измерительных сигналов используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации комбинации измерительных сигналов; и
блок приема, выполненный с возможностью приема отчета измерения, переданного вторым узлом связи, где отчет измерения передает результат измерения, выполненного вторым узлом связи согласно информации измерения.
В первом возможном варианте реализации третьего аспекта измерительный сигнал, переданный первым блоком передачи, является опорным сигналом обнаружения (DRS) и комбинация измерительных сигналов является комбинацией DRS и по меньшей мере одним из опорный сигнал (CRS) конкретной соты, переданный в полном субкадре, CRS, переданный в частичном субкадре, сигнал (SS) синхронизации и опорный сигнал (CSI-RS) информации о состоянии канала или комбинацией по меньшей мере двух из CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS и CSI-RS.
Со ссылкой на третий аспект или первый возможный вариант реализации третьего аспекта, во втором возможном варианте реализации информация о конфигурации измерительного сигнала, переданная первым блоком передачи, включает в себя по меньшей мере одно из:
информации о конфигурации ресурса частотного домена, информации о конфигурации ресурса домена кода, информации о конфигурации субкадра, и информации шаблона на блоке ресурсов.
Со ссылкой на третий аспект или первый или второй возможный вариант реализации третьего аспекта, в третьем возможном варианте реализации информация о конфигурации измерительного сигнала, переданная первым блоком отправки, включает в себя информацию о конфигурации DRS.
Со ссылкой на третий аспект или первый или второй или третий возможный вариант реализации третьего аспекта, в четвертом возможном варианте реализации информация измерения, переданная первым блоком отправки, дополнительно включает в себя: отображение отношений между информацией о конфигурации DRS и CSI-RS.
Со ссылкой на третий аспект или первый или второй или третий или четвертый возможный вариант реализации третьего аспекта, в пятом возможном варианте реализации информация о конфигурации DRS, переданная первым блоком отправки, включает в себя по меньшей мере одно из следующих:
информации порта антенны, информации о конфигурации ресурса частотного домена, информации о конфигурации ресурса домена кода, информации о конфигурации субкадра, информации шаблона на блоке ресурсов и соотношение мощности передачи физического общего канала нисходящей линии связи (PDSCH) к тому же DRS.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый возможный вариант реализации третьего аспекта, в шестом возможном варианте реализации информация о конфигурации субкадра в информации о конфигурации DRS, переданной первым блоком отправки, включает в себя: информацию сдвига субкадра и информацию периода.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой возможный вариант реализации третьего аспекта, в седьмом возможном варианте реализации информация о конфигурации DRS, переданная первым блоком отправки, дополнительно включает в себя: информацию синхронизации, где информация синхронизации включает в себя по меньшей мере одно из следующих: сдвиг числа радио кадра, сдвиг субкадра и сдвиг временного символа.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой возможный вариант реализации третьего аспекта, в восьмом возможном варианте реализации информация о конфигурации измерительного сигнала, переданного первым блоком передачи, включает в себя: информацию о конфигурации CRS, переданную в частичном субкадре, где информация о конфигурации CRS, переданная в частичном субкадре, включает в себя по меньшей мере одно из следующих:
информацию о конфигурации ресурса частотного домена, информацию о конфигурации субкадра, информацию шаблона на блоке ресурсов, где информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой возможный вариант реализации третьего аспекта, в девятом возможном варианте реализации информация измерения, переданная первым блоком отправки, дополнительно включает в себя: идентификацию смежной соты.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый возможный вариант реализации третьего аспекта, в десятом возможном варианте реализации информация измерения, переданная первым блоком отправки, дополнительно включает в себя: тип измерительного сигнала.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый возможный вариант реализации третьего аспекта, в одиннадцатом возможном варианте реализации тип измерительного сигнала в информации измерения, переданной первым блоком передачи, включает в себя по меньшей мере одно из следующих:
измерения всего набора CRS, измерения ограниченного CRS, CSI-RS измерения, DRS измерения, CRS и DRS гибридного измерения, CSI-RS и DRS гибридного измерения, CRS и CSI-RS гибридного измерения, DRS, CRS и CSI-RS гибридного измерения.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый возможный вариант реализации третьего аспекта, в двенадцатом возможном варианте реализации информация измерения, переданная первым блоком передачи, дополнительно включает в себя: информацию конфигурации типа измерения.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый возможный вариант реализации третьего аспекта, в тринадцатом возможном варианте реализации, если отчет об измерениях, принятый блоком приема, передает результат измерения, соответствующий ресурсу DRS, измерение, выполненное с использованием DRS, и после приема блоком приема измерительного отчета, переданного вторым узлом связи, устройство дополнительно включает в себя:
третий блок передачи, выполненный с возможностью передачи информации о конфигурации CRS и/или информации о конфигурации CSI-RS во второй узел связи.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый возможный вариант реализации третьего аспекта, в четырнадцатом возможном варианте реализации информация измерения, переданная первым блоком передачи, дополнительно включает в себя: информацию о конфигурации отчета, используемую для указания способа отправки измерительного отчета вторым узлом связи.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый возможный вариант реализации первого аспекта, в пятнадцатом возможном варианте реализации информация о конфигурации отчета, переданная первым блоком передачи, дополнительно включает в себя:
значение периода отчетности результата измерения второго узла связи с нижнего уровня на верхний уровень; или
значение количества измерительных сигналов результата измерения, направленного вторым узлом связи с нижнего уровня до верхнего уровня.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый возможный вариант реализации третьего аспекта, в шестнадцатом возможном варианте реализации информация о конфигурации измерительного сигнала, переданная первым блоком передачи, дополнительно включает в себя по меньшей мере один набор информации о конфигурации GAP, где:
информация о конфигурации GAP включает в себя: период начала GAP, исходную позицию и длину одного или более GAPs; или
информация о конфигурации GAP включает в себя информацию шаблона GAP конфигурации; или
информация о конфигурации GAP включает в себя значение количества измеряемых измеренных сигналов.
Со ссылкой на третий аспект или первый или второй или третий или четвертый или пятый или шестой или седьмой или восьмой или девятый или десятый или одиннадцатый или двенадцатый или тринадцатый или четырнадцатый или пятнадцатый или шестнадцатый возможный вариант реализации третьего аспекта, в семнадцатом возможном варианте реализации информация о конфигурации GAP в информации о конфигурации измерительного сигнала, переданная первым блоком передачи, дополнительно включает в себя по меньшей мере одно из:
типа измерительного сигнала, соответствующего каждому набору информации о конфигурации GAP и частоты и/или информации системы, соответствующей каждому набору информация о конфигурации GAP.
Четвертый аспект обеспечивает устройство измерения, расположенное на втором узле связи и включающее в себя:
первый блок приема, выполненный с возможностью приема информации измерения, переданной первым узлом связи, при этом информация измерения включает в себя информацию о конфигурации сигнала измерения и/или информацию о конфигурации комбинации сигналов измерения, информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и информация о конфигурации комбинации сигналов измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации комбинации сигналов измерения; и
блок измерения, выполненный с возможностью определения согласно информации о конфигурации сигнала измерения в информации измерения ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и/или определения согласно информации о конфигурации комбинации сигналов измерения в информации измерения ресурса сигнала измерения, соответствующего информации о конфигурации комбинации сигналов измерения; и измерения сигнала измерения, соответствующего ресурсу для получения результата измерения; и
блок передачи, выполненный с возможностью передачи результата измерения на первый узел связи.
В первом возможном варианте реализации четвертого аспекта, сигнал измерения, принятый первым блоком приема, является опорным сигналом обнаружения (DRS) и комбинация измерительных сигналов является комбинацией DRS и по меньшей мере одним из опорного сигнала (CRS) конкретной соты, переданного в полном субкадре, CRS, переданного в частичном субкадре, сигнала (SS) синхронизации и опорного сигнала (CSI-RS) информации о состоянии канала или комбинацией по меньшей мере двух из CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS и CSI-RS.
Пятый аспект обеспечивает узел связи, включающий в себя:
трансивер, выполненный с возможностью: передачи информации измерения в трансивер второго узла связи, где информация измерения включает в себя информацию о конфигурации сигнала измерения и/или информацию о конфигурации комбинации сигналов измерения, информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и информация о конфигурации комбинации сигналов измерения используется для определения ресурса сигнала измерения, соответствующего информации о конфигурации комбинации сигналов измерения; и приема отчета об измерениях, переданного трансивером второго узла связи, где отчет об измерениях несет результат измерения, выполненного вторым узлом связи, согласно информации измерения.
В первом возможном варианте реализации четвертого аспекта, сигнал измерения, переданный трансивером, является опорным сигналом обнаружения (DRS) и комбинация измерительных сигналов является комбинацией DRS и по меньшей мере одного из опорного сигнала (CRS) конкретной соты, переданного в полном субкадре, CRS, переданного в частичном субкадре, сигнала (SS) синхронизации и опорного сигнала (CSI-RS) информации о состоянии канала или комбинацией по меньшей мере двух из CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS и CSI-RS.
Шестой аспект обеспечивает узел связи, включающий в себя:
трансивер, выполненный с возможностью приема информации измерения, переданной трансивером первого узла связи, где информация измерения включает в себя информацию о конфигурации сигнала измерения и/или информацию о конфигурации комбинации сигналов измерения, информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и информация о конфигурации комбинации сигналов измерения используется для определения ресурса сигнала измерения, соответствующего информации о конфигурации комбинации сигналов измерения; и
процессор, выполненный с возможностью: определения, согласно информации измерения, принятой трансивером, ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и/или определения, согласно информации о конфигурации комбинации сигналов измерения в информации измерения, ресурса сигнала измерения, соответствующего информации о конфигурации комбинации сигналов измерения; и измерения сигнала измерения, соответствующего ресурсу для получения результата измерения; при этом:
трансивер дополнительно выполнен с возможностью передачи результата измерения в трансивер первого узла связи.
В первом возможном варианте реализации шестого аспекта, сигнал измерения, принятый трансивером является опорным сигналом обнаружения (DRS) и комбинация измерительных сигналов является комбинацией DRS и по меньшей мере одного из опорного сигнала (CRS) конкретной соты, переданного в полном субкадре, CRS, переданного в частичном субкадре, сигнала (SS) синхронизации и опорного сигнала (CSI-RS) информации о состоянии канала или комбинацией по меньшей мере двух из CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS и CSI-RS.
Седьмой аспект обеспечивает способ измерения соты, включающий в себя этапы, на которых:
передают с помощью первого узла связи, опорный сигнал обнаружения (DRS), сигнализируя второму узлу связи так, чтобы второй узел связи обнаружил и/или измерил первый узел связи, используя сигнализацию; где
DRS сигнализация используется для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, фиксированы; или
используется для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, фиксированы, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или различными; или
используется для указания того, что DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицированы на два типа: один является фиксированным подмножеством, где соты имеют фиксированное подмножество, и другой является гибким подмножеством, где две соты имеют различные гибкие подмножества.
В первом возможном варианте реализации седьмого аспекта,
DRS сигнализация дополнительно используется для управления вторым узлом связи для синхронизации с первым узлом связи, используя сигнализацию, при этом:
физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиции DRS сигнализации на радио ресурсе отличается от той в синхронизации канала.
Со ссылкой на седьмой аспект или первый возможный варианте реализации седьмого аспекта, во втором возможном варианте реализации
DRS ресурс фиксированного подмножества используется для управления вторым узлом связи для выполнения обнаружения соты и/или измерения на этапе выбора соты; и DRS ресурс гибкого подмножества используется для управления вторым узлом связи для выполнения измерения соты и/или временно-частотного отслеживания после того, как второй узел связи считывает вещательное сообщение или принимает предназначенную сигнализацию.
Восьмой аспект обеспечивает способ измерения соты, включающий в себя этапы, на которых:
принимают, с помощью второго узла связи, опорный сигнал обнаружения (DRS) сигнализации, переданный первым узлом связи, при этом сигнализация используется для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, фиксируются; или используется для указания того, что DRS позиция и соответствующий шаблон каждой соты, управляемой первым узлом связи, фиксируется, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или различными; или используются для указания того, что DRS позиция и шаблон каждой соты, управляемой первым узлом связи, являются гибкими; или используются для указания того, что DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицируются на два типа: один является фиксированным подмножеством, где соты имеют одинаковое фиксированное подмножество, и другой является гибким подмножеством, любые две соты имеют различные гибкие подмножества; и
обнаруживают и/или измеряют вторым узлом связи первый узел связи с использованием сигнализации.
В первом возможном варианте осуществления восьмого аспекта.
DRS сигнализация дополнительно используется для управления вторым узлом связи для синхронизации с первым узлом связи, с использованием сигнализации, при этом:
физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиция DRS сигнализации на радио ресурсе отличается от той в синхронизации канала.
Со ссылкой на восьмой аспект или первый возможный вариант реализации восьмого аспекта, во втором возможном варианте реализации
DRS ресурс фиксированного подмножества используется для управления вторым узлом связи для выполнения обнаружения соты и/или измерения на этапе выбора соты; DRS ресурс гибкого подмножества используется для управления вторым узлом связи для выполнения измерения соты и/или временно-частотного отслеживания после того, как второй узел связи считывает вещательное сообщение или принимает заданную сигнализацию.
Девятый аспект обеспечивает устройство измерения, расположенное на первом узле связи, включающее в себя:
блок отправки, выполненный с возможностью отправлять опорный сигнал обнаружения (DRS) сигнализации во второй узел связи, так что второй узел связи обнаруживает и/или измеряет первый узел связи с помощью сигнализации; где:
DRS сигнализация используется для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, фиксированы; или
используется для указания того, что DRS позиция и соответствующий шаблон каждой соты, управляемые первым узлом связи, фиксированы, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или различными; или
используется для указания того, что DRS позиция и соответствующий шаблон каждой соты, управляемые первым узлом связи, являются гибкими; или
используется для указания того, что DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицированы на два типа: один является фиксированным подмножеством, где соты имеют фиксированное подмножество, и другой является гибким подмножеством, где две соты имеют различные гибкие подмножества.
В первом возможном способе реализации девятого аспекта,
DRS сигнализация, переданная блоком передачи, дополнительно используется для указания второму узлу связи выполнить синхронизацию с первым узлом связи с использованием сигнализации; при этом:
физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиция сигнализации DRS на радио ресурсе отличается от той в канале синхронизации.
Десятый аспект обеспечивает устройство измерения соты, расположенное на втором узле связи и включающее в себя:
блок приема, выполненный с возможностью приема опорного сигнала обнаружения DRS сигнализации, передаваемой первым узлом связи, где используется сигнализация для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, являются фиксированными; или используется для указания того, что позиция DRS и соответствующий шаблон каждой соты, управляемой первым узлом связи, фиксированы, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или разными; или используется для указания того, что DRS позиция и шаблон каждой соты, управляемой первым узлом связи, являются гибкими; или используется для указания, что DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицируются на два типа: один является фиксированным подмножеством, где соты имеют такое же фиксированное подмножество, а другой представляет собой гибкое подмножество, где любые две соты имеют различные гибкие подмножества; и
блок управления, выполненный с возможностью предоставления возможности второму узлу связи обнаружить и/или измерить первый узел связи, используя сигнализацию.
В первом возможном способе реализации десятого аспекта, DRS сигнализация, принятая блоком приема, дополнительно используется для указания второму узлу связи выполнить синхронизацию с первым узлом связи, используя сигнализацию; при этом:
физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиции DRS сигнализации на радиоресурсе отличается от, того что в канале синхронизации.
Одиннадцатый аспект обеспечивает узел связи, включающий в себя:
трансивер, выполненный с возможностью передачи опорного сигнала обнаружения (DRS) сигнализации во второй узел связи, так что второй узел связи обнаруживает и/или измеряет первый узел связи с помощью сигнализации; при этом:
сигнализация DRS используется для указания того, что DRS позиции и шаблоны всех сот, управляемые узлом связи, являются фиксированными; или
используется для указания того, что позиция DRS и соответствующий шаблон каждой соты, управляемой узлом связи, фиксированы, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или разными; или
используется для указания того, что позиция DRS и шаблон каждой соты, управляемой узлом связи, является гибким; или
используется для указания того, что DRS ресурсы каждой из сот, управляемых узлом связи, классифицируются на два типа: один является фиксированным подмножеством, где соты имеют такое же фиксированное подмножество, а другой представляет собой гибкое подмножество, где любые две соты имеют различные гибкие подмножества.
В первом возможном способе реализации одиннадцатого аспекта, DRS сигнализация, отправленная с помощью трансивера, дополнительно используется для указания второму узлу связи выполнить синхронизацию с узлом связи с использованием сигнализации; при этом:
физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиции DRS сигнализации на радиоресурсе отличается от той в канале синхронизации.
Двенадцатый аспект обеспечивает узел связи, включающий в себя:
трансивер, выполненный с возможностью приема опорного сигнала обнаружения (DRS) сигнализации, переданного первым узлом связи, где используется сигнализация для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, являются фиксированными; или используется для указания того что DRS позиция и соответствующий шаблон каждой соты, управляемой первым узлом связи, фиксированы, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или разными; или используется для указания того, что DRS позиция и шаблон каждой соты, управляемой первым узлом связи, являются гибкими; или используется для указания того, что DRS ресурсы каждой из сот, управляемой первым узлом связи, классифицируются на два типа: один является фиксированным подмножеством, где соты имеют такое же фиксированное подмножество, а другой представляет собой гибкое подмножество, где любые две соты имеют различные гибкие подмножества; и
процессор, выполненный с возможностью обнаружения и/или измерения первого узла связи с помощью сигнализации.
В первом возможном способе реализации двенадцатого аспекта, DRS сигнализация, принятая трансивером дополнительно используется для указания узлу связи осуществить синхронизацию с первым узлом связи с использованием сигнализации; при этом:
физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиции DRS сигнализации на радиоресуре отличается от той, что в канале синхронизации.
Как может быть известно из приведенных выше технических решений, которые описаны в вариантах осуществления настоящего изобретения, первый узел связи конфигурирует информацию измерения для второго узла связи, и передает информацию измерения для второго узла связи, так что второй узел связи измеряет измерительный сигнал, соответствующий информации о конфигурации сигнала измерения в информации измерения, и передает обратно результат измерения в первый узел связи и так, что первый узел связи управляет вторым узлом связи.
Краткое описание чертежей
Для более четкого описания технических решений в вариантах осуществления настоящего изобретения или в предшествующем уровне техники, приводятся следующие краткие прилагаемые чертежи, необходимые для описания вариантов осуществления или предшествующего уровня техники. Очевидно, что прилагаемые чертежи в следующем описании показывают всего лишь некоторые варианты осуществления настоящего изобретения, и специалист в данной области все еще может получить другие чертежи из этих сопроводительных чертежах без творческих усилий.
Фиг. 1 представляет собой блок-схему алгоритма способа измерения согласно варианту осуществления настоящего изобретения;
фиг. 2 является другой блок-схемой алгоритма способа измерения согласно варианту осуществления настоящего изобретения;
фиг. 3 является еще одной блок-схемой алгоритма способа измерения согласно варианту осуществления настоящего изобретения;
фиг. 4 является еще одной блок-схемой алгоритма способа измерения согласно варианту осуществления настоящего изобретения;
фиг. 5А показывает схему, иллюстрирующую, что только DRS сигнализация передается в соответствии с вариантом осуществления настоящего изобретения;
фиг. 5В показывает схему, иллюстрирующую, что различные типы сигнализации передаются и сосуществуют в соответствии с вариантом осуществления настоящего изобретения;
фиг. 6 представляет собой блок-схему алгоритма способа измерения соты в соответствии с вариантом осуществления настоящего изобретения;
фиг. 7 является еще одной блок-схемой алгоритма способа измерения соты в соответствии с вариантом осуществления настоящего изобретения;
фиг. 8 представляет собой схематическую структурную схему измерительного устройства в соответствии с вариантом осуществления настоящего изобретения;
фиг. 9 является еще одной структурной схемой измерительного устройства в соответствии с вариантом осуществления настоящего изобретения;
фиг. 10 является схематической структурной схемой измерительного устройства соты в соответствии с вариантом осуществления настоящего изобретения;
фиг. 11 является другой структурной схемой измерительного устройства соты в соответствии с вариантом осуществления настоящего изобретения;
фиг. 12 является схематической структурной схемой узла связи в соответствии с вариантом осуществления настоящего изобретения;
фиг. 13 является другой структурной схемой узла связи в соответствии с вариантом осуществления настоящего изобретения;
фиг. 14 представляет собой блок-схему алгоритма способа измерения в соответствии с вариантом осуществления настоящего изобретения;
фиг. 15 показывает схему, представляющую отчетность измерительного значения периода в соответствии с вариантом осуществления настоящего изобретения; и
фиг. 16 является другой блок-схемой алгоритма способа измерения соты в соответствии с вариантом осуществления настоящего изобретения.
Осуществление изобретения
Ниже четко и полностью описаны технические решения в вариантах осуществления настоящего изобретения со ссылкой на прилагаемые чертежи в вариантах осуществления настоящего изобретения. Очевидно, что описанные варианты осуществления являются просто частью вариантов осуществления настоящего изобретения, а не всеми вариантами осуществления. Все другие варианты, полученные специалистом в данной области техники на основании вариантов осуществления настоящего изобретения без творческих усилий, должно входить в объем патентной защиты настоящего изобретения.
Процедура измерений, описанная в настоящем изобретении, представляет собой специальное действие обнаружения соты (также упоминается как идентификация соты, нахождение соты и т.п.) и/или действие измерения соты.
Ссылаясь на фиг. 1. Фиг. 1 представляет собой блок-схему алгоритма способа измерения согласно варианту осуществления настоящего изобретения, где способ включает в себя:
Этап 101: первый узел связи передает информацию измерения на второй узел связи, где информация измерения включает в себя информацию о конфигурации измерительного сигнала и/или информацию о конфигурации комбинации сигналов измерений, информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации сигнала измерения, и информации о конфигурации комбинации сигналов измерения используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации комбинации сигналов измерений.
Информация измерения может быть отправлена первым узлом связи на второй узел связи, используя выделенную сигнализацию, и может быть также отправлена с помощью системного сообщения. Информация в информации об измерениях включает в себя информацию измерения соты/частоты первого узла связи, и может дополнительно включать в себя информацию измерения другой соседней соты/частоты.
Информация измерения используется вторым узлом связи для обнаружения соты, соответствующей информации измерения; или
информация измерения используется вторым узлом связи для обнаружения соты, соответствующей информации измерения, и дополнительного измерения соты, соответствующей информации об измерениях; или
информация измерения используется вторым узлом связи для измерения соты, соответствующей информации об измерении.
В одном варианте осуществления первый узел связи может быть базовой станцией, и второй узел связи может быть UE (в этом варианте осуществления, может быть одно UE, и также может быть несколько UEs, которые не ограничивается в этом варианте осуществления). Базовая станция посылает информацию измерения, сконфигурированную базовой станцией, в пользовательское устройство UE, так что UE определяет, в соответствии с информацией о конфигурации измерительного сигнала в информации измерения, ресурс сигнала измерения, соответствующий информации о конфигурации измерительного сигнала, измеряет сигнал измерения, соответствующего ресурса; и впоследствии, UE может послать результат измерения в базовую станцию.
В другом варианте осуществления, как первый узел связи, так и второй узел связи могут быть UE. В этом случае UE, выступающее в качестве первого узла связи, может конфигурировать информацию измерения для другого UE (то есть, второй узел связи), и отправлять сконфигурированную информацию измерения на другое UE (может быть одно UE, и также могут быть множество пользовательских устройств, что не ограничивается в данном варианте осуществления); после приема информации измерения, другое UE определяет, в соответствии с информацией о конфигурации измерительного сигнала в информации об измерениях, ресурс сигнала измерения, соответствующий информации о конфигурации сигнала измерения, и измеряет сигнал измерения, соответствующего ресурса; и впоследствии, другое UE (то есть, второй узел связи) посылает результат измерения в UE (то есть, первый узел связи).
В другом варианте осуществления, как первый узел связи, так и второй узел связи могут быть базовыми станциями, и в этом случае, базовая станция, обслуживающая в качестве второго узла связи, интегрирует функцию измерения UE. Базовая станция (то есть, первый узел связи) конфигурирует информацию измерения для другой базовой станции (то есть, второй узел связи), и посылает сконфигурированную измерительную информацию на другую базовую станцию; после приема информации измерения, другая базовая станция определяет, в соответствии с измерительной информацией, соответствующий ресурс сигнала измерения в соответствии с информацией измерения, и измеряет сигнал измерения, соответствующего ресурса; и впоследствии, другая базовая станция (то есть, второй узел связи) посылает результат измерения в базовую станцию (то есть, первый узел связи).
В другом варианте осуществления, перед этапом 101, первый узел связи получает информацию измерения соседней соты.
Первый узел связи может получить информацию измерения соседней соты через интерфейс Х2 или другой интерфейс (например, радио интерфейс) между двумя базовыми станциями, или операциями, администрированием и обслуживанием (ОАМ, операции, управление и техническое обслуживание). В частности, например, когда интерфейс между первым узлом связи и третьим узлом связи установлен, то первый узел связи принимает информацию соты, переданную соседним третьим узлом связи, соты соседнего третьего узла связи, где информация соты содержит информацию, такую как частотный диапазон несущей соты, тип несущей, идентификатор соты (ID) и информация о конфигурации измерительного сигнала; и возможно, дополнительно включает в себя тип несущей назначенной несущей соседнего третьего узла связи.
Этап 102: Первый узел связи принимает отчет об измерении, переданный вторым узлом связи, где отчет об измерении несет результат измерения, выполненного с помощью второго узла связи в соответствии с информацией измерения.
В этом варианте осуществления, первый узел связи принимает отчет об измерениях, отправленный вторым узлом связи (может быть UE или базовой станции, интегрирующей функцию UE), где отчет об измерении содержит результат измерения, выполненного вторым узлом связи в соответствии с информацией измерения. Впоследствии, первый узел связи управляет вторым узлом связи в соответствии с результатом измерения. Два случая используются в качестве примеров ниже для описания процесса, в котором первый узел связи управляет вторым узлом связи в соответствии с результатом измерения в варианте осуществления настоящего изобретения, но настоящее изобретение не ограничивается приведенными двумя случаями; управление также может быть выполнено для других случаев, в соответствии с различным контентом, включенным в состав результата измерения, который не ограничивается в этом варианте осуществления.
В одном случае, после получения отчет об измерениях, первый узел связи может определить качество сигнала, мощность сигнала измеренной соты/несущей в соответствии с результатом измерения, и управлять вторым узлом связи и измеренной соты/несущей, где управление, осуществляемое на втором узле связи, и измеренной соты/несущей включает в себя следующее: первый узел связи определяет, следует ли добавить или удалить несущую для второго узла связи, или добавить или удалить моту в наборе СОМР или определяет, выполнить ли операцию хендовера для второго узла связи в или из измеренной соты/несущей.
В другом случае, после получения отчета об измерениях, первый узел связи может определить качество сигнала UE в обслуживающей соте/несущей (набор) в соответствии с результатом измерения, и выбрать механизм планирования, который подходит для второго узла связи.
То есть, в этом варианте осуществления, первый узел связи принимает отчет об измерении, направленного вторым узлом связи, где отчет об измерении включает в себя результат измерения, который получают после того, как второй узел связи выполнил измерение на назначенной соте/несущей, согласно информации измерения. Два случая используются в качестве примеров, но настоящее изобретение не ограничивается этим.
В варианте осуществления настоящего изобретения, первый узел связи конфигурирует информацию измерения для второго узла связи, и передает информацию измерения на второй узел связи, так, что второй узел связи измеряет сигнал измерения, соответствующий информации о конфигурации сигнала измерения в информации измерения, и передает обратно результат измерения на первый узел связи и так, что первый узел связи управляет вторым узлом связи.
Информация измерения может быть отправлена первым узлом связи на второй узел связи, используя выделенную сигнализацию, а также может быть отправлена с помощью системного сообщения. Информация в информации об измерениях включает в себя информацию измерения соты/частоты первого узла связи, и может дополнительно включать в себя информацию измерения другой соседней соты/частоты.
Информация измерения используется вторым узлом связи для обнаружения соты, соответствующей информации об измерениях; или
измерительная информация используется вторым узлом связи для обнаружения соты, соответствующей информации об измерениях, и дополнительно измеряет соту, соответствующая информации об измерениях; или
измерительная информация используется вторым узлом связи для измерения соты, соответствующая информации об измерении.
Информация измерения включает в себя информацию о конфигурации сигнала измерения и/или информацию о конфигурации комбинации сигналов измерения, если информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации сигнала измерений, и информация о конфигурации комбинации сигналов измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации комбинации сигналов измерений.
Сигнал измерения является опорным сигналом обнаружения (DRS, опорные сигналы обнаружения).
Комбинация сигналов измерения является комбинацией DRS, по крайней мере, одного из опорного сигнала конкретной соты (CRS, опорный сигнал конкретной соты), переданного в полном субкадре, CRS, отправленного в частичном субкадре, сигналом синхронизации (SS сигнал синхронизации) и опорного сигнала информации о состоянии канала (CSI-RS, опорный сигнала информации состояния канала) или комбинации по меньшей мере двух CRS, отправленного в полном субкадре, CRS, отправленного в частичном субкадре, SS и CSI-RS. После приема информации измерения, второй узел связи выполняет обнаружение соты и/или измерение соты с помощью по меньшей мере одного из вышеупомянутых сигналов измерения или комбинации сигналов измерения.
В варианте осуществления настоящего изобретения, DRS является новым сигналом для обнаружения соты/идентификации соты/измерения соты (символ "/" указывает на "и/или" отношения), и также может быть назван как опорный сигнал отслеживания (опорные сигналы отслеживания TRS,) или сигнал обнаружения (DS, сигнал обнаружения). Название не ограничивается этим.
Возможно, для CRS, отправленного в частичном субкадре, первый узел связи передает информацию о конфигурации CRS, и информация о конфигурации CRS, отправленная в частичном субкадре, содержит по меньшей мере одно из следующих:
информацию о конфигурации ресурсов частотного домена, информацию о конфигурации субкадра, и информацию шаблона на блок ресурса, где информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода, и для CRS, переданного в полном субкадре, информацию о конфигурации CRS во временном домене, не требуется получать уведомления.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации сигнала измерения включает в себя по меньшей мере одно из следующих: информацию о конфигурации ресурсов в частотной области, информацию о конфигурации ресурса домена кода, информацию о конфигурации субкадра, информацию о пространственном домене и информацию шаблона на блок ресурса.
Информация о конфигурации ресурсов в частотной области используется вторым узлом связи для определения ресурса в частотной области, например, информации конкретной поднесущей или информации физического блока ресурсов (PRB) сигнала измерения, соответствующего информации о конфигурации сигнала измерения,
Информация о конфигурации ресурсов в частотной области используется вторым узлом связи для приема сигнала во всех или части позиций, обозначенных информацией о конфигурации ресурсов в частотной области так, чтобы выполнять дальнейшее измерение.
Информация о конфигурации ресурсов в кодовой области может включать в себя, но не ограничивается этим, адрес кода, код скремблирования, код последовательности и код инициализации последовательности, где информация о конфигурации ресурсов домена кода, используется вторым узлом связи для определения того, идентифицируется ли принятый сигнал как сигнал, который будет принят.
Информация о конфигурации субкадра может включать в себя, но не ограничивается этим, информацию сдвига субкадра и информацию периода, где информация о конфигурации субкадра используется вторым узлом связи для получения сигналов во всех или части субкадров, назначенных информацией о конфигурации субкадра так, чтобы выполнить дальнейшие измерения.
Информация шаблона на блок ресурса включает в себя распределение сигнала во временной области (например, степень детализации временного символа) и/или частотной области (например, детализация информации поднесущей) на блок ресурса (например, один субкадр). Информация шаблона на блок ресурса используется вторым узлом связи для приема сигнала во всех или части позиций, обозначенных на блок ресурса, чтобы выполнить дальнейшее измерение.
Информация пространственного домена может включать, но не ограничивается этим, информацию антенны (количество антенных портов), информацию волнового пучка, информацию потока и информационную матрицу пространственного кодирования, когда информация пространственного домена используется вторым узлом связи для приема сигнализации во всех или части позиций, обозначенных информацией пространственного домена, чтобы выполнить дальнейшее измерение. Когда какой-либо элемент вышеприведенной информации был известен до момента приема вторым узлом связи информации о конфигурации, например, информация была отправлена в системном сообщении первого узла связи или информация определена в протоколе связи (например, TS 3GPP36.211), то второй узел связи может быть не проинформирован с использованием информации о конфигурации.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте реализации, информация о конфигурации сигнала измерения включает в себя: информацию о конфигурации DRS; соответственно, информация измерений может дополнительно включать в себя отображение отношений между информацией о конфигурации DRS и CSI-RS.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления информация о конфигурации DRS включает в себя по меньшей мере одно из следующих: информацию порта антенны (может включать в себя количество антенн и/или количество антенных портов), информацию о конфигурации ресурса частотного домена, информацию о конфигурации ресурсов в кодовой области, информацию о конфигурации субкадра, информацию шаблона на блок ресурса и отношение мощности передачи физического общего канала нисходящей линии связи (PDSCH) к DRS. Для информации о конфигурации ресурсов частотной области, информации о конфигурации ресурсов домена кода, информации о конфигурации субкадра и информации шаблона на блок ресурсов, необходимо обратиться к предшествующему описанию. Таким образом, подробное описание далее не повторяется.
Информация о конфигурации субкадра может включать в себя, но не ограничивается этим, информацию сдвига субкадра и информацию периода, и может дополнительно включать в себя другую информацию, которая не ограничивается этим вариантом осуществления.
Возможно, на основании вышеизложенного соответствующего варианта осуществления, в другом варианте осуществления информация о конфигурации DRS может дополнительно включать в себя: информацию синхронизации, где информация синхронизации содержит по меньшей мере одно из следующего: сдвиг числа радиокадра, сдвиг субкадра и сдвиг временного символа.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации сигнала измерения включает в себя: информацию о конфигурации CRS, отправленную в частичном субкадре, и информация о конфигурации CRS отправленная в частичном субкадре включает в себя по меньшей мере одно из следующих: информацию о конфигурации ресурсов частотного домена, информацию о конфигурации субкадра и информацию шаблона на блок ресурса, где информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерения дополнительно включает в себя: идентификацию соседней соты. Идентификация соседней соты включает в себя по меньшей мере одно из идентификация физической соты (PCI), идентификация DRS и идентификация CSI-RS, но настоящее изобретение не ограничивается этим.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерений может дополнительно включать в себя: тип измерительного сигнала, где тип измерительного сигнала может включать в себя, но не ограничивается по меньшей мере одно из следующих: CRS весь набор измерений, CRS ограниченное измерение, измерение CSI-RS, измерение DRS, CRS и DRS гибридное измерение, CSI-RS и DRS гибридное измерение, CRS и CSI-RS гибридное измерение и DRS, CRS и CSI-RS гибридное измерение.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерения дополнительно включает в себя: информацию о конфигурации типа измерения, где информация о конфигурации типа измерения включает в себя по меньшей мере одно из следующего: измерение RRM, измерение RLM, значение CSI и по меньшей мере одно из СА, СОМР и MSA измерений обслуживания.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, если отчет об измерении несет результат измерения, соответствующего ресурса DRS, выполненного с использованием сигнала (DRS), и после того, как первый узел связи принимает отчет об измерениях, отправленный вторым узлом связи, способ может дополнительно включать в себя: передачу информации о конфигурации CRS и/или информацию о конфигурации CSI-RS во второй узел связи.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерений может дополнительно включать в себя: информацию о конфигурации отчета, которая используется для указания способа отправки отчета об измерении вторым узлом связи. То есть, значение периода отчетности измерения от нижнего уровня к более высокому уровню добавляется в информацию о конфигурации отчета. Возможно, для этого значения, точность и период передачи DRS должны быть приняты во внимание.
Возможно, информация о конфигурации отчета может дополнительно включать в себя: значение периода отчетности результата измерения с помощью второго узла связи с нижнего уровня на более высокий уровень; или значение количества измерительных сигналов в результате измерений, направленного вторым узлом связи от нижнего уровня к более высокому уровню, если информация о конфигурации отчета включает в себя значение периода отчетности измерения от нижнего уровня к более высокому уровню. Возможно, значение периода определяется первым узлом связи в соответствии с точностью и передачи периода передачи сигнала измерения.
То есть, в вышеуказанном варианте осуществления в информации измерения, что также может быть истолковано, как задача измерения, переданная первым узлом связи во второй узел связи, каждая задача измерения может включать в себя информацию объекта измерения (объект измерения) и информацию о конфигурации отчета (конфигурация отчета), где информация объекта измерения используется для указания назначенной соты/ несущей, которая должна быть измерена посредством UE, и информация о конфигурации отчета используется для определения информации о конфигурации для запуска второго узла связи (например, UE или базовая станция, интегрирующая UE) для передачи отчета об измерении на первый узел связи. Информация объекта измерения и информация о конфигурации отчета являются информационными сообщениями в задаче измерения, и первый узел связи может предпочтительно добавлять информацию указания опорного сигнала в информацию объекта измерения, и может добавить информацию указания опорного сигнала в информацию о конфигурации отчета, что не ограничивается в этом варианте осуществления.
Информация объекта измерения включает в себя комбинацию по меньшей мере одного из идентификация соседней соты, типа измерительного сигнала, информация о конфигурации типа измерения, информация о конфигурации сигнала измерения и указание информации о конфигурации отчета. Конфигурация обычной соты, отправленная первым узлом связи на второй узел связи, является обычной конфигурацией измерения, основанной на CRS/CSI-RS, в то время как конфигурация усовершенствованной соты, отправленная первым узлом связи во второй узел связи, является новым способом измерения (то есть, типом сигнала измерения).
Информация измерения может включать в себя комбинацию по меньшей мере одного из идентификации соседней соты, информации о частоте, PCI, идентификации DRS (набор) и RS-CSI (набор) идентификации. В дополнение к по меньшей мере одному из CRS всего набора измерений, CRS ограниченного измерения и измерения CSI-RS, тип сигнала измерения может дополнительно включать в себя, по меньшей мере: измерение DRS, CRS и DRS гибридное измерение, CSI-RS и DRS гибридное измерение, CRS и CSI-RS гибридное измерение или DRS, CRS и CSI-RS гибридное измерение. Для информации о конфигурации типа измерения, если выполняется измерение соседней соты, информация о конфигурации типа измерения является RRM измерением по умолчанию, и явно конфигурация сигнализации не требуется; если выполняется измерение обслуживаемой соты, первый узел связи (например, базовая станция) должен уведомить второй узел связи (например, UE), что тип измерения, соответствующего измерительного сигнала в информации объекта измерения, является комбинацией по меньшей мере одного из измерения RRM, измерение RLM, измерение отчетов CSI-значения и CA/COMP/MSA измерениями обслуживания, где CA/COMP/MSA могут включать в себя один или более из СА, СОМР и MSA.
Информация о конфигурации типа измерения включает в себя информацию ограниченного измерения CRS (например, начальную позицию, которая может использовать период 5 мс). Информация о конфигурации DRS включает в себя: информацию антенного порта (информация порта антенны может представлять собой информацию о количестве антенн и/или номер порта антенны), информация о конфигурации ресурса частотного домена, информация о конфигурации ресурса домена кода, информация о конфигурации субкадра (включающая в себя информацию сдвига субкадра и информацию периода), отношение, принятого UE, мощности передачи PDSCH к тому, что в DRS; и может дополнительно включать в себя: информацию синхронизации измеренной соты, например, сдвиг SFN, сдвиг субкадра и или смещение символа.
Кроме того, конфигурация DRS может быть цельным набором субкадра или подмножеством субкадра DRS. Когда измеряемая сота имеет конфигурацию ABS, второй узел связи может выполнять измерение с помощью пересечение набора конфигурации измерения, и доставленного набора ограниченного измерения, но настоящее изобретение не ограничивается этим, и может дополнительно включать в себя другие способы, которые не ограничиваются в этом варианте осуществления.
Для выбора типа сигнала измерения, первый узел связи (например, базовая станция) может выбрать тип измерительного сигнала в конкретном случае в соответствии с изменением радиосигналов соты. Например, если радиосигнал соты изменяется быстро, с тем чтобы избежать поочередной передачи обслуживания или преждевременной передачи обслуживания, вызванного зависимостью только от измерения, могут быть использованы DRS, CRS и DRS гибридных измерений, CSI-RS и DRS гибридного измерения, DRS, CRS, и CSI-RS гибридных измерений или тому подобное.
Например, второй узел связи (например, UE) сначала получает начальное значение соседней соты путем измерения DRS, и затем измеряет CRS и/или CSI-RS, чтобы удовлетворить последующий гистерезис и ТТТ требования отчета.
Значение периода отчетности измерений от нижнего уровня к более высокому уровню добавляют в информации о конфигурации отчета. Возможно, для этого значения, точность и период передачи DRS должны быть приняты во внимание.
То есть, информация о конфигурации измерительного сигнала может дополнительно включать в себя информацию указания измерения измеряемой соты, такую как m-RSRP информацию указания измерения и/или информацию указания измерений m-RSRQ (m может быть CRS, CSI-RS и/или DRS); информация о конфигурации измерительного сигнала может дополнительно включать в себя информацию указания способа отчетность измерения, используемую для указания второму узлу связи (например, UE), либо выполнить периодическую отчетность измерений, или событийную отчетность измерения на измеряемой соте. Если информация указания способа отчетности измерения показывает, что способ отчетности представляет собой событийную отчетность измерения, то информация о конфигурации измерительного сигнала может дополнительно включать в себя конфигурацию значения гистерезиса и время гистерезиса, максимальное количество измеренных сот, которые могут быть представлены, и количество отчетов, и/или другие параметры вспомогательной конфигурации, такие как параметр, относящийся к 3-х уровневой гладкой фильтрации. Если информация указания способа отчетности измерения показывает, что способ отчетность является способом периодической отчетности измерения, то сообщение о конфигурации измерения может дополнительно включать в себя период отчета о конфигурации. Конечно, вышеуказанные параметры могут быть предварительно сконфигурированы на втором узле связи по умолчанию, которые не ограничивается в этом варианте осуществления.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации измерительного сигнала может дополнительно включать в себя по меньшей мере один набор информации о конфигурации GAP, где информация о конфигурации GAP включает в себя: период запуска GAP, начальное положение, длину одного или более GAPs; или информация о конфигурации GAP включает в себя информацию шаблона конфигурации GAP; или информация о конфигурации GAP включает в себя значение количества сигналов измерения, которые должны быть измерены.
Информация о конфигурации GAP может дополнительно включать в себя по меньшей мере одно из следующих: тип измерительного сигнала, соответствующий каждому набору информации о конфигурации GAP, частоте и/или системной информации, соответствующей каждому набору информации о конфигурации GAP.
То есть, в вышеуказанных вариантах осуществления вводится, особенно, новый механизм конфигурации GAP в конфигурацию межчастотного измерения: формат GAP является гибким, и формат GAP может соответствовать шаблону DRS, если период DRS соты является 400ms и DRS появляется дважды в нулевом субкадре, и первый субкадр нулевого радио кадра, формат GAP, сконфигурированный для UE, равен 2 мс GAP, и начальная позиция находится в нулевом субкадре нулевого радио кадра через каждые 400ms. Более того, для периода измерения, необходимо учитывать точность и период передачи DRS. Если DRS субкадр удовлетворяет точности измерения, длина GAP может быть, что один кадр и период измерения равны 1 мс; если три DRS субкадров удовлетворяют точности измерений и три DRS субкадра распределены в пределах шести субкадров, то длина GAP может быть 1 мс или 6 мс и период измерения равен 6 мс.
Альтернативно, в этом варианте осуществления, первый узел связи (например, базовая станция) конфигурирует множество комбинаций GAP шаблона для второго узла связи (к примеру, UE), или первый узел связи уведомляет второй узел связи о множестве комбинаций GAP шаблонов. Например, базовая станция уведомляет UE о типе GAP, используемого для обнаружения SS, типе GAP, используемый для выявления DRS, типе GAP, используемого для выявления CRS и типе GAP, используемый для обнаружения CSI-RS или тому подобное.
Относительно фиг. 2, являющейся другой блок-схемой алгоритма способа измерения согласно варианту осуществления настоящего изобретения, способ включает в себя этапы, на которых:
Этап 201: Второй узел связи принимает информацию измерения, переданную первым узлом связи, где информация измерения включает в себя информацию о конфигурации измерительного сигнала и/или информацию о конфигурации комбинации сигналов измерений, информация о конфигурации сигнала измерений используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и информации о конфигурации комбинации сигналов измерений, используемая вторым узлом связи для определения ресурса измерительного сигнала, соответствующей информации о конфигурации комбинации сигналов измерений.
В одном варианте осуществления первый узел связи может быть базовой станцией, и второй узел связи может быть UE.
В другом варианте осуществления, как первый узел связи, так и второй узел связи могут быть UE. В этом случае UE, выступающей в качестве первого узла связи, может конфигурировать информацию измерения для другого UE (то есть, второго узла связи), и отправлять сконфигурированную измерительную информацию на второй узел связи.
В другом варианте осуществления, как первый узел связи, так и второй узел связи может быть базовой станцией, и в этом случае, базовая станция, служащая в качестве второго узла связи, интегрирует функцию измерения UE.
Этап 202: Второй узел связи определяет, в соответствии с информацией о конфигурации измерительного сигнала в информации об измерениях, ресурс сигнала измерения, соответствующей информации о конфигурации измерений сигнала, и/или определяет, в соответствии с информацией о конфигурации комбинации измерительного сигнала в информации об измерениях, ресурс сигнал измерения, соответствующий информации о конфигурации комбинации сигналов измерения; и измеряет сигнал измерения, соответствующий ресурсу для получения результата измерения.
Определение того, что, в соответствии с информацией о конфигурации сигнала измерений, ресурс сигнала измерения, соответствующий информации о конфигурации измерительного сигнала, может быть идентичен или отличаться от определения, в соответствии с информацией о конфигурации комбинации сигналов измерений, ресурса сигнала измерения, соответствующий информации о конфигурации комбинации сигналов измерения, что не ограничивается этим вариантом осуществления.
На этом этапе, после приема информации измерения, второй узел связи может определить, в соответствии с измерительной информацией, ресурс измеряемого сигнала измерения, например, позицию или несущую; и затем, измеряет сигнал измерения, соответствующего ресурса.
То есть, после приема информации измерения, переданной первым узлом связи, (например, базовой станции), второй узел связи (например, UE или базовая станция, интегрирующая функцию UE) может отличить, в соответствии с разностью информации о конфигурации RS измеренной соты и/или идентичности конфигурации (например, информация порта антенны или индекса конфигурации количества CSI-RS/DRS информации о конфигурации) измеренных сот в информации о конфигурации измерений в информации об измерениях различные измеренные соты, указанные тем же физическим идентификатором сот, и выполнить операцию измерения.
Второй узел связи может выполнять измерение на соответствующем измеренной соте с помощью сигнальной информации о конфигурации измеряемой соты для получения результата измерения измеряемой соты например, DRS-RSRP и/или DRS-RSRQ измеренной соты. Возможно, второй узел связи может связывать результат измерения по меньшей мере с одним из информацией о конфигурации сигнала в информации о конфигурации измерительного сигнала, конфигурации идентичности измеряемой соты и индексного номера измерений. В практическом применении, второй узел связи может периодически измерять соту и сообщать результат измерения измеряемой соты.
Если информация измерения, полученная вторым узлом связи, включает в себя информацию указания измерения, такую как m-RSRP информацию указания измерения и/или информацию указания измерений m-RSRQ, то второй узел связи может получить, согласно информации указания измерения, значение измерения, требуемое первым узлом связи, и сообщить результат измерения в первый узел связи в качестве результата измерения. Например, если информация измерения, переданная первым узлом связи, включает в себя информацию указания измерения D-RSRP, то второй узел связи получает D-RSRP измеренной соты; и если информация измерения, переданная первым узлом связи, включает в себя информацию указания измерения D-RSRQ, то второй узел связи получает D-RSRQ измеренной соты.
Этап 203: Второй узел связи передает результат измерения в первый узел связи.
Второй узел связи передает результат измерения в первый узел связи так, что первый узел связи управляет вторым узлом связи. Для описания конкретного процесса управления необходимо обратиться к соответствующему описанию в предыдущем варианте осуществления. Таким образом, подробное описание не повторяется в настоящем документе.
В варианте осуществления настоящего изобретения, второй узел связи выполняет измерение на соответствующем сигнале измерения в соответствии с информацией о конфигурации измерительного сигнала в полученной информации об измерениях, и передает обратно результат измерения на первый узел связи, так что первый узел связи управляет вторым узлом связи.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, в целях повышения производительности, сигнал измерения является опорным сигналом обнаружения (DRS), и комбинация сигналов измерения является комбинацией DRS и по меньшей мере одним из (CRS) опорным сигналом конкретной соты, передаваемый в полном субкадре, CRS, отправленным в частичном субкадре, сигналом синхронизации (SS) и опорным сигналом (CSI-RS) информации состояния канала, или комбинацией по меньшей мере двух CRS, отправленных в полном субкадре, CRS, отправленном в частичном субкадре, SS и CSI-RS.
Второй узел связи дополнительно выполнен с возможностью определять, в соответствии с сигналом измерения или информацией конфигурации измеряемого сигнала, сигнала подлежащего измерению и сигнала подлежащего измерению для получения результата измерения.
В этом варианте осуществления, прием отправленной информации измерения вторым узлом связи и прием отправленного сигнала измерения или комбинации сигналов измерения вторым узлом связи, не имеют особого временного порядка и также могут быть обработаны одновременно, что не ограничивается этим вариантом осуществления.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации измерительного сигнала включает в себя по меньшей мере одно из следующих: информацию о конфигурации ресурсов в частотной области, информацию о конфигурации домена кодового ресурса, информацию о конфигурации субкадра, информацию о пространственном домене и информацию шаблона на блок ресурса.
Для конкретных определений информации о конфигурации ресурсов частотной области, информации о конфигурации домена кодового ресурса, информацию о конфигурации субкадра, информации пространственного домена и информации шаблона на блок ресурса, может быть сделана ссылка на соответствующее описание в предыдущих вариантах осуществления, и поэтому дополнительное описание не повторяется в настоящем документе.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации сигнала измерения включает в себя: информацию о конфигурации DRS. Кроме того, информация измерения может дополнительно включать в себя: отображение отношения между информацией о конфигурации DRS и CSI-RS.
Информация по конфигурации DRS включает в себя по меньшей мере одно из: информации антенного порта, информации о конфигурации ресурса частотного домена, информации о конфигурации ресурсов домена кода, информации о конфигурации субкадра, информации шаблона на блок ресурса и отношение мощности передачи физического нисходящего общего канала (PDSCH) к DRS. Для получения описания информации антенного порта, информации о конфигурации ресурса частотного домена, информации о конфигурации ресурсов домена кода, информации о конфигурации субкадра, информации шаблона на блок ресурса может быть специально сделана ссылка на соответствующее описание в вышеприведенных вариантах осуществления и, следовательно, подробное описание не повторяется в данном документе.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления информация о конфигурации DRS дополнительно включает в себя: информацию синхронизации, где информация синхронизации содержит по меньшей мере одно из: сдвига числа кадра радиосвязи, сдвига субкадра и сдвига временного символа.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации сигнала измерения включает в себя: информацию о конфигурации CRS, переданного в частичном субкадре, и информация о конфигурации CRS, переданного в частичном субкадре включает в себя по меньшей мере одно из: информации о конфигурации ресурсов частотного домена, информации о конфигурации субкадра и информации шаблона на блок ресурса, где информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерения дополнительно содержит: идентификатор соседней соты, где идентификатор соседней соты содержит по меньшей мере одно из следующих: идентификатор физической соты (PCI), идентификатор DRS и идентификатор CSI-RS.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерения дополнительно включает в себя: тип измерительного сигнала, где тип измерительного сигнала включает в себя: CRS целого набора измерений, CRS ограниченное измерение, измерение CSI-RS, DRS измерение, CRS и DRS гибридное измерение, CSI-RS и DRS гибридное измерение, CRS и CSI-RS гибридное измерение и DRS, CRS и CSI-RS гибридное измерение.
В другом аспекте, если информация измерения, принятая вторым узлом связи, включает в себя тип измерительного сигнала, второй узел связи может активно выбирать, в соответствии с новым механизмом, тип сигнализации для измерения и способ измерения. Например, если второй узел связи подключен к макросоте и уровень сигнала и/или качество сигнала обслуживающей соты второго узла связи выше, чем соответствующее пороговое значение, например, RSRP больше определенного порогового значения, то второй узел связи выполняет измерение на соседней соте с использованием DRS типа измерения; в отличие от этого, если уровень сигнала и/или качество сигнала обслуживающей соты второго узла связи выше, чем пороговое значение, например, второй узел связи подключен к границе соты, и RSRP меньше, чем пороговое значение, то второй узел связи может выполнять измерения на соседней соте с помощью "CRS или CSI-RS или DRS с CRS/CSI-RS типом измерений. Если второй узел связи соединяется с небольшой сотой, такой как NCT сота, то UE может выполнять измерения на соседней соте с использованием DRS типа измерения. Соседняя сота, описанная в этом варианте осуществления, может быть внутричастотной соседней сотой или межчастотной соседней сотой, что не ограничивается в этом примере.
В другом аспекте второй узел связи может также выбрать тип сигнализации измерения, удержанием изменения радиосигнала соты в определенном сценарии согласно истории сигнализации измерения. Например, когда радиосигнал соты изменяется быстро, чтобы не допустить переадресации передачи обслуживания и преждевременной передачи, вызванные зависимостью лишь от измерения DRS, могут использоваться CRS и DRS гибридное измерения, CSI-RS и DRS гибридное измерения или DRS, CRS и CSI-RS гибридные измерения. Например, UE сначала получает начальное значение соседней соты путем измерения DRS, а затем измеряет CRS и/или CSI-RS для удовлетворения последующих требований отчетности гистерезиса и ТТТ.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерения дополнительно включает в себя: информацию о конфигурации типа измерений.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, если отчет об измерении несет результат измерения, соответствующего ресурса DRS, измерение, выполненное с использованием DRS, и после этого первый узел связи принимает отчет об измерениях, отправленный вторым узлом связи, способ может дополнительно включать в себя: передачу информации о конфигурации CRS и/или информацию о конфигурации CSI-RS во второй узел связи.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерения дополнительно включает в себя: информацию о конфигурации отчета, которая используется, чтобы указать способ отправки отчета об измерении вторым узлом связи.
Информация о конфигурации отчета может дополнительно включать в себя: значение периода отчетности результата измерения с помощью второго узла связи от нижнего уровня к более высокому уровню, или значение количества измерительных сигналов в результате измерения, направленных вторым узлом связи от нижнего уровня на более высокий уровень. Возможно, значение периода отчетности измерения вторым узлом связи от нижнего уровня к более высокого уровню определяется первым узлом связи в соответствии с точностью отправки и периодом передачи сигнала измерения.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации измерительного сигнала может дополнительно включать в себя по меньшей мере один набор информации о конфигурации GAP, где информация о конфигурации GAP включает в себя: период запуска GAP, начальное положение, длину одного или нескольких GAPs; или информация о конфигурации GAP включает в себя информацию шаблона конфигурации GAP; или информация о конфигурации GAP включает в себя значение количества измерительных сигналов для измерения.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления информация о конфигурации GAP дополнительно включает по меньшей мере одно из следующих: тип измерительного сигнала, соответствующего каждому набору информации о конфигурации GAP, частоту и/или системную информацию, соответствующую каждому набору информации о конфигурации GAP.
На фиг. 3 показана еще одна блок-схема алгоритма способа измерения согласно варианту осуществления настоящего изобретения, где способ включает в себя:
Этап 301: первый узел связи получает информацию измерения соседней соты.
Информация измерения соседней соты может быть получена через интерфейс Х2, или другой интерфейс (например, беспроводной интерфейс) между двумя базовыми станциями или ОAM.
В частности, например, когда интерфейс между первым узлом связи и третьим узлом связи установлен, то первый узел связи принимает информацию соты, переданную соседним третьим узлом связи, соты, находящейся в зоне покрытия соседнего третьего узла связи, где информация соты включает в себя информацию, такую как частотный диапазон несущей соты, тип несущей, идентификатор соты (ID) и информацию о конфигурации измерительного сигнала.
Возможно, информация соты дополнительно включает в себя тип несущей назначенной несущей соседнего третьего узла связи.
Этап 302: Первый узел связи посылает информацию измерения на второй узел связи, где информация измерения включает в себя: информацию о конфигурации сигнала измерения и информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации измерительного сигнала.
В этом варианте осуществления, информация измерения может передаваться первым узлом связи на второй узел связи с помощью выделенной сигнализации, и также может быть послана с помощью системного сообщения. Информация в информации об измерениях включает в себя информацию измерения соты/частоты первого узла связи, и может дополнительно включать в себя информацию измерения другой соседней соты/частоты.
Информация измерения используется вторым узлом связи для обнаружения соты, соответствующей информации измерения; или
информация измерения используется вторым узлом связи для обнаружения соты, соответствующей информации об измерениях, и дополнительного измерения соты, соответствующей информации об измерениях; или
информация измерения используется вторым узлом связи для измерения соты, соответствующей информации об измерении.
В одном варианте осуществления, первый узел связи может быть базовой станцией, и второй узел связи может быть UE (в этом варианте осуществления, может быть одним UE и также может быть множеством устройств UE, которое не ограничивается в этом варианте осуществления). Базовая станция посылает информацию измерения, конфигурированную базовой станцией, в устройство пользователя UE, так что UE определяет, в соответствии с информацией о конфигурации измерительного сигнала в информации об измерениях, ресурс сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и измеряет сигнал измерения, соответствующего ресурса.
В другом варианте осуществления, как первый узел связи, так и второй узел связи могут быть UE. В этом случае, UE, выступающей в качестве первого узла связи, может конфигурировать информацию измерения для другого UE (то есть, второго узла связи) и отправлять сконфигурированную информацию измерения на другое UE (может быть одно UE и также может быть множество устройств, что не ограничивается в данном варианте осуществления); после приема информации измерения, другое UE определяет, в соответствии с информацией о конфигурации сигнала измерения в информации об измерениях, ресурс сигнала измерения, соответствующий информации о конфигурации сигнала измерения, и измеряет сигнал измерения соответствующего ресурса.
В другом варианте осуществления, как первый узел связи, так и второй узел связи могут быть базовыми станциями, и в этом случае, базовая станция, служащая в качестве второго узла связи, интегрирует функцию измерения UE. Базовая станция (то есть, первый узел связи) конфигурирует информацию измерения для другой базовой станции (то есть, второго узла связи) и посылает сконфигурированную измерительную информацию на другую базовую станцию; после приема информации измерения, другая базовая станция определяет соответствующий ресурс измерительного сигнала в соответствии с информацией измерения и измеряет сигнал измерения соответствующего ресурса.
Сигнал измерения является опорным сигналом обнаружения (DRS, опорный сигнал обнаружения); комбинация сигналов измерения является комбинацией DRS и по меньшей мере одним из опорный сигнал конкретной соты (CRS, опорный сигнал конкретной соты), отправленный в полном субкадре, CRS, отправленным в частичном субкадре, сигнал синхронизации (SS, сигнал синхронизации) и опорный сигнал информации состояния канала (CSI-RS, опорный сигнал информации состояния канала) или комбинацией по меньшей мере двух CRS, отправленного в полном субкадре, CRS, отправленного в частичном субкадре, SS и CSI-RS. После приема информации измерения второй узел связи выполняет обнаружение соты и/или измерение соты с помощью по меньшей мере одного из вышеописанных сигналов измерения или комбинации сигналов измерения.
В настоящем изобретении, DRS является новым сигналом для обнаружения соты/измерения соты/идентификации соты (символ "/" указывает на "и или" отношения), и также может называться опорным сигналом отслеживания (TRS, опорный сигнал отслеживания) или сигналом обнаружения (DS, сигнал обнаружения); название не ограничивается этим.
Возможно, для CRS, отправленного в частичном субкадре, первый узел связи передает информацию о конфигурации CRS, и информация о конфигурации CRS, отправленная в частичном субкадре, содержит по меньшей мере одно из:
информации о конфигурации ресурсов в частотном домене, информации о конфигурации субкадра и информации шаблона на блок ресурса, где информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода; и для CRS, переданного в полном субкадре, информация о конфигурации CRS во временной области не требует получения уведомления.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации измерительного сигнала включает в себя по меньшей мере одно из следующих: информацию о конфигурации ресурсов в частотной области, информацию о конфигурации ресурса кодового домена, информацию о конфигурации субкадра, информацию о пространственном домене и информацию шаблона на блок ресурса.
Информация о конфигурации ресурсов в частотной области используется вторым узлом связи для определения ресурса в частотной области, например, информации конкретной поднесущей или информации физического блока ресурсов (PRB) сигнала измерения, соответствующего информации о конфигурации сигнала измерения.
Информация о конфигурации ресурсов в частотной области используется вторым узлом связи для приема сигнала во всех или части позиций, обозначенных информацией о конфигурации ресурсов в частотной области так, чтобы выполнять дальнейшее измерение.
Информация о конфигурации ресурсов в кодовой области может включать в себя, но не ограничивается этим, код адреса, код скремблирования, код последовательности и код инициализации последовательности, где информация о конфигурации ресурсов домена кода используется вторым узлом связи для определения, является ли принятый сигнал сигналом, предназначенным для приема.
Информация о конфигурации субкадра может включать в себя, но не ограничивается этим, информацию сдвига субкадра и информацию периода, где информация о конфигурации субкадра используется вторым узлом связи для получения сигналов во всех или части субкадров, назначенных информацией о конфигурации субкадра, таким образом, чтобы выполнить дальнейшие измерения.
Информация шаблона на блок ресурса включает в себя распределение сигнала во временной области (например, степень детализации временного символа) и/или частотной области (например, детализация информации поднесущей) на блок ресурса (например, один субкадр). Информация пространственного домена может включать в себя, но не ограничиваются этим, информацию антенны (количество антенных портов), информацию пучка волны, информацию потока и информацию матрицы пространственного кодирования, где информация пространственной области используется вторым узлом связи для получения сигнализации во всех или части позиций, обозначенных информацией пространственной области, чтобы выполнить дальнейшее измерение.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации сигнала измерения включает в себя: информацию о конфигурации DRS; соответственно, информация измерений может дополнительно включать в себя отображение отношений между информацией о конфигурации DRS и CSI-RS.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления информация о конфигурации DRS включает в себя по меньшей мере одно из следующих: информацию порта антенны (может включать в себя количество антенн и/или количество портов антенн), информацию о конфигурации ресурса частотного домена, информацию о конфигурации ресурсов в кодовой области, информацию о конфигурации субкадра, информацию шаблона на блок ресурса и отношение мощности передачи физического нисходящего общего канала (PDSCH) к DRS. Для получения информации о конфигурации ресурсов в частотной области, информации о конфигурации ресурсов домена кода, информации о конфигурации субкадра и информации шаблона на блок ресурса, необходимо сослаться на предшествующее описание. Таким образом, подробное описание таковых не повторяется в настоящем документе.
Информация о конфигурации субкадра может включать в себя, но не ограничивается этим, информацию сдвига субкадра и информацию перила и может дополнительно включать в себя другую информацию, которая не ограничивается этим вариантом осуществления.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления информация о конфигурации DRS может дополнительно включать в себя: информацию синхронизации, где информация синхронизации содержит по меньшей мере одно из следующего: сдвиг числа кадра радиосвязи, сдвиг субкадра и сдвиг временного символа.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация о конфигурации измерительного сигнала включает в себя: информацию о конфигурации CRS, отправленного в частичном субкадре, и информация о конфигурации CRS, отправлено в частичном субкадре включает в себя по меньшей мере одно из следующих: информацию о конфигурации ресурсов частотного домена, информацию о конфигурации субкадра и информацию шаблона на блок ресурса, где информация конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Возможно, на основании всех вышеприведенных вариантов осуществления, в другом варианте осуществления, информация измерения дополнительно включает в себя: идентификатор соседней соты. Идентификатор соседней соты включает в себя по меньшей мере одно из идентификатор физической соты (PCI), идентификатор DRS, идентификационную информацию третьего узла связи и идентификатор CSI-RS, но настоящее изобретение не ограничивается этим.
Информация измерения может дополнительно включать в себя: информацию синхронизации измеренной соты, например, сдвиг SFN, сдвиг субкадра и/или сдвиг символов.
Кроме того, конфигурация DRS может быть субкадром полного набора или подмножеством субкадра DRS. Когда измеряемая сота имеет конфигурацию ABS, второй узел связи может выполнять измерение с помощью пересечение множества конфигурации измерения и доставленного набора ограниченного измерения, но настоящее изобретение не ограничивается этим, и может дополнительно включать в себя другие способы, которые не ограничивается в этом варианте.
Фиг. 4 является другой блок-схемой алгоритма способа измерения согласно варианту осуществления настоящего изобретения, где способ включает в себя:
Этап 401: Второй узел связи принимает информацию об измерении, переданную первым узлом связи, где информация измерения включает в себя: информацию о конфигурации сигнала измерения и информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующая информации о конфигурации измерительного сигнала.
В одном варианте осуществления первый узел связи может быть базовой станцией, и второй узел связи может быть UE.
В другом варианте осуществления, как первый узел связи, так и второй узел связи могут быть UE. В этом случае, UE, выступающее в качестве первого узла связи, может конфигурировать информацию измерения для другого UE (то есть, второго узла связи) и отправлять сконфигурированную информацию измерения на второй узел связи.
В другом варианте осуществления, как первый узел связи, так и второй узел связи могут быть базовыми станциями, и в этом случае, базовая станция, служащая в качестве второго узла связи, интегрирует функцию измерения UE.
Этап 402: Второй узел связи определяет, в соответствии с информацией о конфигурации измерительного сигнала в информации об измерениях, ресурс сигнала измерения, соответствующей информации о конфигурации сигнала измерения, и измеряет сигнал измерения, соответствующего ресурса для получения результата измерения.
На этой стадии, после приема информации измерения, второй узел связи может определить, в соответствии с информации об измерениях, ресурс сигнала измерения, который должен быть измерен, например, позиция или несущая; и затем, измеряет сигнал измерения, соответствующего ресурса.
То есть, после приема информации измерения, переданной первым узлом связи (например, базовой станцией), второй узел связи (например, UE или базовой станцией с функцией UE) может отличить, в соответствии с разностью информации о конфигурации RS измеренной соты и/или конфигурации идентификаторов (например, информации порта антенны или индекса конфигурации количества CSI-R/информации о конфигурации DRS) измеренных сот в информации о конфигурации измерений в информации об измерениях, различные измеренные соты, указанные теми же идентификаторами физической соты, и выполнить операцию измерения.
Второй узел связи может выполнять измерение на соответствующей измеренной соте с помощью информации о конфигурации сигнализации измеряемой соты, для получения результата измерения измеряемой соты, например, DRS-RSRP и/или DRS-RSRQ измеренной соты. Возможно, второй узел связи может связывать результат измерения по меньшей мере с одним из информацией о конфигурации сигнала в информации о конфигурации сигнала измерения, конфигурации идентификатора измеряемой соты и индексного номера измерений. В практическом применении, второй узел связи может периодически измерять измеренную соту, и сообщать результат измерения измеряемой соты.
Если информации измерения, полученная вторым узлом связи, включает в себя информацию указания измерения, такую как m-RSRP информацию указания измерения и/или информацию указания измерений m-RSRQ, то второй узел связи может получить, согласно информации указания измерения, значение измерения, требуемое первым узлом связи, и сообщить результат измерения в первый узел связи в качестве результата измерения. Например, если информация измерения, переданная первым узлом связи, включает в себя информацию указания измерения D-RSRP, то второй узел связи получает D-RSRP измеренной соты; и если информация измерения, переданная первым узлом связи, включает в себя информацию указания измерения D-RSRQ, то второй узел связи получает D-RSRQ измеренной соты.
Этап 403: Второй узел связи выполняет обнаружение соты и/или выбор соты и/или повторный выбор соты и/или RLM в соответствии с результатом измерения.
В варианте осуществления настоящего изобретения, второй узел связи выполняет измерение на соответствующем измерительном сигнале в соответствии с информацией о конфигурации измерительного сигнала в полученной информации об измерениях, и выполняет, в соответствии с результатом измерения, процесс управления, например, обнаружение сот и/или выбор сот и/или повторный выбор соты и/или RLM на соте, в соответствии с сигналом измерения.
Вариант осуществления настоящего изобретения также относится к способу измерения соты, и способ включает в себя:
отправку первым узлом связи опорного сигнала обнаружения (DRS), сигнализируя во второй узел связи, что второй узел связи обнаружил и/или измерил первый узел связи, используя сигнализацию; где
DRS позиции и шаблоны (позиция и шаблон) всех сот, управляемые первым узлом связи, фиксированы; или
DRS позиция и шаблон (позиция и шаблон) каждой конкретной соты, управляемой первым узлом связи, фиксированы, но DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или различными, т.е. DRS позиция и соответствующий шаблон одной соты могут быть теми же или отличаться от DRS позиции и соответствующего шаблона другой соты, что не ограничивается в этом варианте осуществления; или
DRS позиция и шаблон каждой конкретной соты, управляемой первым узлом связи являются гибкими; т.е. DRS позиция и шаблон каждой конкретной соты могут быть гибкими и сконфигурированы согласно фактического требованию; или
DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицированы на два типа: один является фиксированным подмножеством, где соты имеют фиксированное подмножество, и другой является гибким подмножеством, где две соты имеют различные гибкие подмножества.
DRS ресурс фиксированного подмножества используется вторым узлом связи для выполнения обнаружения соты и/или измерения на этапе выбора соты; DRS ресурс гибкого подмножества используется вторым узлом связи для выполнения измерения соты и/или частотно-временного отслеживания после того, как второй узел связи считает вещательное сообщение или примет предназначенную сигнализацию.
Возможно, на основании вышеизложенных вариантов осуществления, в другом варианте осуществления опорный сигнал обнаружения (DRS) сигнализации дополнительно используется вторым узлом связи для синхронизации с первым узлом связи, используя сигнализацию, где:
физическая последовательность опорного сигнала обнаружения DRS сигнализации и/или позиции DRS сигнализации на радио ресурсе отличается от той в канале синхронизации.
В этом варианте осуществления первый узел связи является, например, UE, и второй узел связи является, например, базовой станцией, но настоящее изобретение не ограничивается этим. В этом варианте осуществления, UE передает новую DRS сигнализацию по нисходящей линии связи на базовую станцию, где физическая последовательность сигнализации и/или позиция сигнализации на радиоресурсе может отличаться от текущей SS; и сигнализация, в частности, включает в себя:
1) только DRS сигнализацию; или
2) DRS и CRS с периодом 5 мс (время повторного 5 мс CRS).
Конечно, DRS может также включать в себя функцию SS, которая не ограничивается в этом варианте осуществления.
В одном варианте осуществления DRS позиции и шаблоны (позиция и шаблон) всех сот, управляемых первым узлом связи, являются фиксированными; или
В другом варианте осуществления, DRS позиция и шаблон (позиция и шаблон) каждой соты, управляемой первым узлом связи, являются фиксированными, и могут быть различными в разных сотах.
В другом варианте осуществления, DRS позиция и шаблон (включающая в себя DRS шаблон распределения на блоке субкадра и в шаблон передачи среди субкадров, например, с периодом 400 мс, субкадров, в которых DRS отправляется, и субкадров, в которых DRS не отправляется) каждой соты, управляемой первым узлом связи, являются гибкими и конфигурируется, например, позицией субкадра /PRB, периодом передачи DRS, шаблоном DRS и плотностью DRS в определенном субкадре.
В этом варианте осуществления DRS ресурс может быть на уровне соты, а также может иметь на уровень UE, которое не ограничивается этим вариантом осуществления.
В другом варианте осуществления DRS ресурс классифицируется на два типа: один является фиксированным подмножеством, где все элементы имеют одно и то же фиксированное подмножество; а другой представляет собой гибкое подмножество, любые две из всех сот имеют различные гибкие подмножества.
Причина в том, что в начальной стадии выбора соты UE, отсутствует предварительная информация, фиксированное подмножество DRS ресурса используется, чтобы выполнить обнаружение соты и измерение; после того, как UE считывает широковещательное сообщение, ресурс фиксированного подмножества и ресурс гибкого подмножества может быть использован для выполнения измерения соты и частотно-временного отслеживания.
Схематическая диаграмма показывает, что посылается только один вид DRS сигнализации и принципиальная схема показывает, что различные типы сигнализации посылаются, как показано на фиг. 5А и фиг. 5В, соответственно. Фиг. 5А показывает схему, иллюстрирующая, что посылается только DRS сигнализация в соответствии с вариантом осуществления настоящего изобретения, и на фиг. 5В показана схема, иллюстрирующая, что множество типов сигнализации посылаются и сосуществуют в соответствии с вариантом осуществления настоящего изобретения.
На фиг. 5А, как показано, что только DRS посылается сотой и может быть использовано для обнаружения соты/измерения, позиции субкадра, в которых DRS отправляется, одинаковы в соте 1 и в соте 3, и позиции субкадра, в которых DRS отправляется, отличаются в соте 1 и соте 2.
На фиг. 5В показано, что SS, DRS, CRS и CSI-RS переданы сотой и могут быть использованы для обнаружения соты/измерения, позиции субкадра, в которых DRS отправляется, одинаковы в соте 1 и соте 2, и позиции субкадра, в которых DRS отправляется, отличаются в соте 1 и соте 3. Однако, настоящее изобретение не ограничивается этим, и приведенное выше описание служит только в качестве примеров в этом варианте осуществления.
В варианте осуществления настоящего изобретения, первый узел связи передает опорный сигнал обнаружения (DRS) сигнализации во второй узел связи так, что второй узел связи использует сигнализацию для обнаружения и/или измерения первого узла связи, с тем, чтобы управлять первым узлом связи.
Фиг. 6 представляет собой блок-схему алгоритма способа измерения соты в соответствии с вариантом осуществления настоящего изобретения, где способ включает в себя:
Этап 601: Второй узел связи принимает опорный сигнал обнаружения (DRS) сигнализации, переданный первым узлом связи, где используется сигнализация для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, являются фиксированными; или используется для указания того, что DRS позиция и соответствующий шаблон каждой соты, управляемой первым узлом связи, являются фиксированными, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или разными; или используется для указания того, что DRS полиция и шаблон каждой соты, управляемой первым узлом связи, конфигурируются; или используется для указания того, что DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицируются на два типа: один является фиксированным подмножеством, где соты имеют такое же фиксированное подмножество, и другой представляет собой гибкое подмножество, где любые две соты имеют различные гибкие подмножества.
DRS ресурс фиксированного подмножества используется для указания второму узлу связи выполнить обнаружение соты и/или измерение на этапе выбора соты; и DRS ресурс гибкого подмножества используется для указания второму узлу связи выполнить измерение соты и/или частотно-временное отслеживание после того, как второй узел связи считывает широковещательное сообщение или принимает выделенную сигнализацию.
Этап 602: второй узел связи обнаруживает и/или измеряет первый узел связи с помощью сигнализации.
Возможно, DRS сигнализация дополнительно используется для указания второму узлу связи выполнить синхронизацию с первым узлом связи с использованием сигнализации, где физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиция DRS сигнализации на радиоресурсе отличается от той в канале синхронизации.
В варианте осуществления настоящего изобретения, после приема опорного сигнала обнаружения (DRS) сигнализации, переданного первым узлом связи, второй узел связи обнаруживает и/или измеряет первый узел связи с помощью сигнализации, таким образом, чтобы управлять первым узлом связи.
Фиг. 7 является другой блок-схема алгоритма способа измерения соты в соответствии с вариантом осуществления настоящего изобретения, где способ включает в себя:
Этап 701: второй узел связи принимает информацию измерения, переданную первым узлом связи, где информация измерения включает в себя информацию о конфигурации DRS.
Первый узел связи принимает отчет об измерении, переданный вторым узлом связи, где отчет об измерении несет результат измерения, выполняемого вторым узлом связи в соответствии с информацией измерения.
Информация измерения может быть отправлена первым узлом связи на второй узел связи, используя выделенную сигнализацию, и может быть отправлена также с помощью системного сообщения. Информация в информации об измерениях включает в себя информацию измерения соты/частоты первого узла связи, и может дополнительно включать в себя информацию измерения другой соседней соты /частоты.
Информация измерения используется вторым узлом связи для обнаружения соты, соответствующей информации об измерениях; или
информация измерения используется вторым узлом связи для обнаружения соты, соответствующей информации об измерениях, и дополнительного измерения соты, соответствующей информации об измерениях; или
информация измерения используется вторым узлом связи для измерения соты, соответствующей информации об измерении.
Этап 702: Второй узел связи выполняет обнаружение соты в соответствии с полученной информацией о конфигурации DRS, и при обнаружении соты, посылает отчет об измерении в первый узел связи так, что первый узел связи доставляет соответствующую информацию конфигурации CRS и/или CSI-RS, соответствующей DRS измеренной соты, на второй узел связи после приема отчета измерения, что DRS принят и отправлен вторым узлом связи, или непосредственно выполнена процедура передачи обслуживания для UE.
Отчет об измерениях несет по меньшей мере одно из следующих: результат измерений и соответствующий индекса числа информации о конфигурации DRS; и может дополнительно включать в себя идентификационную информацию соседней соты.
Этап 703: второй узел связи выполняет измерения в соответствии с принятой информацией о конфигурации CRS и/или информацией о конфигурации CSI-RS, и посылает отчет об измерении в базовую станцию, где отчет измерения несет результат измерения и соответствующий индекс числа информации о конфигурации DRS.
Основываясь на процессе осуществления вышеприведенного способа, вариант осуществления настоящего изобретения дополнительно обеспечивает измерительное устройство, структурная схема которого показана на фиг. 8. Устройство находится на первом узле связи. Устройство включает в себя: первый блок 81 передачи и блок 82 приема, где первый блок 81 передачи выполнен с возможностью отправлять информацию об измерениях на второй узел связи, где информация измерения включает в себя информацию о конфигурации сигнала измерения и/или информацию о конфигурации комбинации сигналов измерения, информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и информация о конфигурации комбинации сигналов измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации комбинации сигналов измерений.
Блок 82 приема выполнен с возможностью принимать отчет об измерениях, переданный вторым узлом связи, где отчет об измерении несет результат измерения, выполненного с помощью второго узла связи в соответствии с информацией измерения.
Возможно, сигнал измерения, переданный первым блоком передачи, является опорным сигналом обнаружения DRS, и комбинацию сигналом измерения, которая является комбинацией DRS и по меньшей мере одно из CRS опорный сигнал конкретной соты, отправленный в полном субкадре, CRS, отправленный в частичном субкадре, сигнал синхронизации SS и опорный сигнал CSI-RS информации состояния канала, или комбинацию по меньшей мере двух CRS, отправленного в полном субкадре, CRS, отправленного в частичном субкадре, SS и CSI-RS.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации сигнала измерения, переданную первым блоком передачи, включает в себя по меньшей мере одно из: информации о конфигурации ресурсов в частотной области, информации о конфигурации ресурса кодового домена, информации о конфигурации субкадра, информации о пространственного домена и информации шаблона блока ресурса.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации сигнала измерения, переданная первым блоком передачи, включает в себя: информацию о конфигурации DRS.
Возможно, в вышеприведенном варианте осуществления информация измерения, переданная первым блоком передачи, дополнительно включает в себя: отображение отношения между информацией конфигурации DRS и CSI-RS.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации DRS, переданная первым блоком передачи, включает в себя по меньшей мере одно из: информации антенного порта, информации о конфигурации ресурса частотного домена, информации о конфигурации ресурсов домена кода, информации о конфигурации субкадра, информации шаблона блока ресурса и отношение мощности передачи физического общего канала нисходящей линии связи (PDSCH) к DRS. Для определения информации о конфигурации ресурса частотного домена, информации о конфигурации ресурсов домена кода, информации о конфигурации субкадра и информацию шаблона на блок ресурса, необходимо обратиться к предшествующему описанию. Таким образом, подробное описание не повторяется в настоящем документе.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации субкадра в информации конфигурации DRS, переданная первым блоком передачи, включает в себя: информацию сдвига субкадра и информацию периода.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации DRS, переданная первым блоком передачи, дополнительно включает в себя: информацию синхронизации, где информация синхронизации содержит по меньшей мере одно из следующего: сдвиг числа кадра радиосвязи, сдвиг субкадра и сдвиг временного символа.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации сигнала измерения, переданная первым блоком передачи, включает в себя: информацию о конфигурации CRS, переданную в частичном субкадре, и информация о конфигурации CRS переданная в частичном субкадре включает в себя по меньшей мере одну из: информации о конфигурации ресурсов частотного домена, информации о конфигурации субкадра и информации шаблона блока ресурса, где информация о конфигурации субкадра включает в себя: информацию сдвига субкадра и информацию периода.
Возможно, в вышеприведенном варианте осуществления информация измерения, отправленная первым блоком передачи, включает в себя: идентификатор соседней соты.
Возможно, в вышеприведенном варианте осуществления информация измерения, переданная первым блоком передачи, включает в себя: тип сигнала измерения.
Возможно, в вышеприведенном варианте осуществления тип сигнала измерения в информации об измерениях, переданной первым блоком передачи, включает в себя: CRS целого множества измерений, CRS ограниченное измерение, CSI-RS измерение, DRS измерение, CRS и DRS гибридное измерение, CSI-RS и DRS гибридное измерение, CRS и CSI-RS гибридное измерение и DRS, CRS и CSI-RS гибридное измерение.
Возможно, в вышеприведенном варианте осуществления информация измерения, переданная первым блоком передачи, дополнительно включает в себя: информацию о конфигурации типа измерений.
Возможно, в вышеприведенном варианте осуществления, если отчет об измерении, принятый блоком приема, несет результат измерения, соответствующего DRS ресурса, измерение, выполненное с использованием DRS, и после того, как блок приема принимает отчет об измерениях, переданный вторым узлом связи, устройство может дополнительно включать в себя: третий блок передачи, выполненный с возможностью передавать информацию о конфигурации CRS и/или информацию о конфигурации CSI-RS на второй узел связи.
Возможно, в вышеприведенном варианте осуществления информация измерения, переданная первым блоком передачи, дополнительно включает в себя: информацию о конфигурации отчета, которая используется для указания способа отправки отчета об измерении вторым узлом связи.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации отчета, переданная первый блоком передачи, включает в себя:
значение периода отчетности результата измерения с помощью второго узла связи с нижнего уровня на более высокий уровень; или значение количества измерительных сигналов в результате измерений, направленного вторым узлом связи от нижнего уровня к более высокому уровню, где информация о конфигурации отчета включает в себя значение периода отчетности измерения от нижнего уровня к более высокому уровню. Возможно, значение периода определяется устройством в соответствии с точностью передачи и периода передачи сигнала измерения.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации сигнала измерения может дополнительно включать в себя по меньшей мере один набор информации о конфигурации GAP, где информация о конфигурации GAP включает в себя: период запуска GAP, начальное положение, длину одного или более GAPs; или информация о конфигурации GAP включает в себя информацию шаблона конфигурации GAP; или информация о конфигурации GAP включает в себя значение количества сигналов измерения, которые должны быть измерены.
Возможно, в вышеприведенном варианте осуществления информация о конфигурации GAP в информации о конфигурации сигнала измерения, переданная первым блоком передачи, включает в себя по меньшей мере одно из следующих: тип измерительного сигнала, соответствующего каждому набору информации о конфигурации GAP, и частоты и/или системной информации, соответствующей каждому набору информации о конфигурации GAP.
Для реализации процесса функций и целей блоков устройства, следует обратиться к соответствующему процессу реализации, описанному в предшествующем способе. Таким образом, подробное описание здесь не приводится.
Фиг. 9 является другой структурной схемой измерительного устройства согласно варианту осуществления настоящего изобретения. Устройство включает в себя: первый блок 91 приема, измерительный блок 92 и блок 93 передачи. Первый блок 91 приема выполнен с возможностью приема информации измерения, переданной первым узлом связи, где информация измерения включает в себя информацию о конфигурации сигнала измерения и/или информацию о конфигурации комбинации сигналов измерений, информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерения, и информация о конфигурации комбинации сигналов измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации комбинации сигналов измерений.
Измерительный блок 92 выполнен с возможностью определения, в соответствии с информацией о конфигурации сигнала измерения в информации об измерениях, ресурс сигнала измерения, соответствующего информации о конфигурации сигнала измерений и/или определения, в соответствии с информацией о конфигурации комбинации сигналов измерения в информации измерения, ресурс сигнала измерения, соответствующий информации о конфигурации комбинации сигналов измерения; и измерения сигнала измерения, соответствующего ресурса, для получения результата измерения. Блок 93 передачи выполнен с возможностью передачи результата измерения на первый узел связи.
Возможно, в вышеприведенном варианте осуществления в устройстве, дополнительно, сигнал измерения, принятый первым блоком приема, может являться опорным сигналом обнаружения (DRS) и по меньшей мере один из опорный сигнал конкретной соты (CRS), переданным в полном субкадре, CRS, переданным в частичном субкадре, сигналом синхронизации (SS) и опорным сигналом (CSI-RS) информации состояния канала, или комбинацией по меньшей мере двух из CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS и CSI-RS.
Для реализации процесса функций и целей блоков устройства, следует обратиться к соответствующему процессу реализации, описанному в предшествующем способе. Таким образом, подробное описание здесь не приводится.
Фиг. 10 является схематической структурной схемы измерительного устройства соты в соответствии с вариантом осуществления настоящего изобретения. Измерительное устройство 10 соты находится на первом узле связи и включает в себя блок 100 передачи. Блок 100 передачи выполнен с возможностью передачи опорного сигнала обнаружения (DRS) сигнализации во второй узел связи так, что второй узел связи обнаруживает и/или измеряет первый узел связи с помощью сигнализации, где DRS сигнализация используется для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, являются фиксированными; используются для указания того, что DRS позиция и соответствующий шаблон каждой соты, управляемой первым узлом связи, являются фиксированными, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или разными; или используются для указания того, что DRS позиция и шаблон каждой соты, управляемые первым узлом связи, конфигурируются; или используются для указания того, что DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицируются на два типа: один является фиксированным подмножеством, где соты имеют такое же фиксированное подмножество, и другой тип представляет собой гибкое подмножество, где любые две соты имеют различные гибкие подмножества.
Возможно, DRS сигнализация, переданная блоком передачи, дополнительно используется для указания второму узлу связи выполнять синхронизацию с первым узлом связи с использованием сигнализации, где физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или в позиция DRS сигнализации на радиоресурсе отличается от той в канале синхронизации.
DRS ресурс фиксированного подмножества используется для указания второму узлу связи выполнить обнаружение соты и/или измерение на этапе выбора соты; и DRS ресурс гибкого подмножества используется для указания второму узлу связи выполнить измерение соты и/или частотно-временное отслеживание после того, как второй узел связи считывает широковещательное сообщение или принимает выделенную сигнализацию.
Для реализации процесса функций и целей блоки устройства, следует обратиться к соответствующему процессу реализации, описанному в предшествующем способе. Таким образом, подробное описание здесь не приводится.
Фиг. 11 является другой структурной схемой измерительного устройства соты в соответствии с вариантом осуществления настоящего изобретения. Измерительное устройство 11 соты находится на втором узле связи и включает в себя блок 111 приема и блок 112 управления. Блок 111 приема выполнен с возможностью принимать опорный сигнал обнаружения (DRS) сигнализации, посылаемый первым узлом связи, где сигнализация используется для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, являются фиксированными; или используется для указания того, что DRS позиция и соответствующий шаблон каждой соты, управляемой первым узлом связи, фиксированы, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или разными; или используется для указания того, что DRS позиция и шаблон каждой соты, управляемой первым узлом связи, конфигурируются; или используется для указания того, что DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицируются на два типа: один является фиксированным подмножеством, где соты имеют такое же фиксированное подмножество, и другой тип представляет собой гибкое подмножество, где любые две соты имеют различные гибкие подмножества.
Блок 112 управления выполнен с возможностью предоставить способность второму узлу связи обнаруживать и/или измерять первый узел связи с помощью сигнализации.
Возможно, DRS сигнализация, принятая блоком приема, дополнительно используется для указания второму узлу связи выполнить синхронизацию с первым узлом связи с использованием сигнализации, где физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиция DRS сигнализации на радиоресурсе отличается от той, что в канале синхронизации.
Для реализации процесса функций и целей блоков устройства, следует обратиться к соответствующему процессу реализации, описанному в предшествующем способе. Таким образом, подробное описание здесь не приводится.
Фиг. 12 является схематической структурной схемой узла связи в соответствии с вариантом осуществления настоящего изобретения. Узел 12 связи включает в себя трансивер 121. Трансивер 121 выполнен с возможностью передачи информации об измерениях в приемопередатчике второго узла связи, где информация измерения включает в себя информацию о конфигурации сигнала измерения, и информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса сигнала измерения, соответствующего информации о конфигурации сигнала измерений, и приема отчета об измерениях, переданного трансивером второго узла связи, где отчет об измерении несет результат измерения, выполненного с помощью второго узла связи в соответствии с информацией измерения.
В этом варианте осуществления второй узел связи может быть узлом связи, отличным от данного узла связи, и также может быть использовано множество других узлов связи, что не ограничивается в этом варианте осуществления.
Возможно, трансивер дополнительно выполнен с возможностью передавать сигнал измерения или комбинацию сигнала измерения в трансивер второго узла связи, где сигнал измерения или комбинация сигналов измерения является сигналом для инструктирования второго узла связи выполнить измерение, сигнал измерения является опорным сигналом обнаружения (DRS), и также комбинация сигналов измерения представляет собой комбинацию DRS и по меньшей мере одним из (CRS) опорного сигнала конкретной соты, переданного в полном субкадре, CRS, переданного в частичном субкадре, сигналом синхронизация (SS) и опорным сигналом (CSI-RS) информации о состоянии канала или комбинацией по меньшей мере двух CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS, и CSI-RS.
Для реализации процесса функций и целей блоки устройства, следует обратиться к соответствующему процессу реализации, описанному в предшествующем способе. Таким образом, подробное описание здесь не приводится.
Фиг. 13 является другой структурной схемой узла связи в соответствии с вариантом осуществления настоящего изобретения. Узел 13 связи включает в себя: трансивер 131 и процессор 132. Трансивер 131 выполнен с возможностью приема информации измерения, переданной приемопередатчиком первого узла связи, где информация измерения включает в себя информацию о конфигурации измерительного сигнала, и информация о конфигурации сигнала измерения используется вторым узлом связи для определения ресурса измерительного сигнала, соответствующего информации о конфигурации измерительного сигнала. Процессор 132 выполнен с возможностью определять, в соответствии с измерительной информацией, принятого от приемопередатчика, ресурс сигнала измерения, соответствующего информации о конфигурации сигнала измерений, и измерять сигнал измерения, соответствующий ресурсу для получения результата измерения.
Трансивер 131 дополнительно выполнен с возможностью передачи результата измерения в трансивер первого узла связи.
В этом варианте осуществления первый узел связи может быть узлом связи, отличным от этого узла связи, и также может быть использовано множество других узлов связи, что не ограничивается в этом варианте осуществления.
Возможно, трансивер дополнительно выполнен с возможностью принимать сигнал измерения или комбинацию сигнала измерения, переданную трансивером первого узла связи, где сигнал измерения или комбинация сигналов измерения является сигналом для инструктирования второго узла связи выполнить измерение, сигнал измерения является опорным сигналом обнаружения (DRS), и также комбинация сигналов измерения представляет собой комбинацию DRS и по меньшей мере одним из (CRS) опорного сигнала конкретной соты, переданного в полном субкадре, CRS, переданного в частичном субкадре, сигналом синхронизация (SS) и опорным сигналом (CSI-RS) информации о состоянии канала или комбинацией по меньшей мере двух из CRS, переданного в полном субкадре, CRS, переданного в частичном субкадре, SS, и CSI-RS.
Для реализации процесса функций и целей блоков устройства, следует обратиться к соответствующему процессу реализации, описанному в предшествующем способе. Таким образом, подробное описание здесь не приводится.
Вариант осуществления настоящего изобретения дополнительно обеспечивает узел связи, и узел связи включает в себя трансивер, выполненный с возможностью передачи опорного сигнала обнаружения (DRS) сигнализации на второй узел связи, так что второй узел связи обнаруживает и/или измеряет узел связи с помощью сигнализации, где DRS сигнализация используется для указания того, что DRS позиции и шаблоны всех сот, управляемые узлом связи, являются фиксированными; или используется для указания того, что DRS позиция и соответствующий шаблон каждой соты, управляемой узлом связи, фиксированы, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или разными; или используется для указания того, что DRS позиция и шаблон каждой соты, управляемой узлом связи, конфигурируются; или используется для указания того, что DRS ресурсы каждой из сот, управляемые узлом связи, классифицируются на два типа: один тип является фиксированным подмножеством, где соты имеют такое же фиксированное подмножество, и другой тип представляет собой гибкое подмножество, где любые две соты имеют различные гибкие подмножества.
Возможно, DRS сигнализация, переданная трансивером, дополнительно используется для указания второму узлу связи выполнить синхронизацию с узлом связи с использованием сигнализации, где физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиции DRS сигнализации на радиоресурсе отличаются от тех, что в канале синхронизации.
Для реализации процесса функций и целей блоков устройства, следует обратиться к соответствующему процессу реализации, описанному в предшествующем способе. Таким образом, подробное описание здесь не приводится.
Вариант осуществления настоящего изобретения также предлагает узел связи, и узел связи включает в себя трансивер и процессор. Трансивер выполнен с возможностью приема опорного сигнала обнаружения (DRS) сигнализации, передаваемого первым узлом связи, где сигнализация используется для указания того, что DRS позиции и шаблоны всех сот, управляемые первым узлом связи, являются фиксированными; или используется для указания того, что DRS позиция и соответствующий шаблон каждой соты, управляемой первым узлом связи, фиксированы, где DRS позиции и соответствующие шаблоны различных сот являются одинаковыми или разными; или используется для указания того, что DRS позиция и шаблон каждой соты, управляемой первым узлом связи, конфигурируются; или используется для указания того, что DRS ресурсы каждой из сот, управляемые первым узлом связи, классифицируются на два типа: один тип является фиксированным подмножеством, где соты имеют такое же фиксированное подмножество, и другой тип представляет собой гибкое подмножество, где любые две соты имеют различные гибкие подмножества. Процессор выполнен с возможностью обнаружения и/или измерения первого узла связи, используя сигнализацию.
Возможно, DRS сигнализация, принимаемая трансивером, дополнительно используется для указания второму узлу связи выполнить синхронизацию с первым узлом связи с использованием сигнализации, где:
физическая последовательность опорного сигнала обнаружения (DRS) сигнализации и/или позиция сигнализации DRS на радиоресурсе отличается от той, что в канале синхронизации.
Для реализации процесса функций и целей блоки устройства, следует обратиться к соответствующему процессу реализации, описанному в предшествующем способе. Таким образом, подробное описание здесь не приводится.
Вариант осуществления настоящего изобретения предотвращает обычное UE или UE более ранних версий от расположения в NCT соте во время выбора/смены/восстановления соты, чтобы не допустить увеличения времени задержки и тем самым, сэкономить электрическую энергию UE, что увеличит эффективность работы системы при функционировании в усовершенствованной соте, тем самым дополнительно повышая эффективность взаимодействия с пользователем.
Для простоты понимания специалисту в данной области техники, настоящее изобретение описано ниже с помощью конкретного примера применения.
Пример 1 применения
Фиг. 14 представляет собой блок-схему алгоритма примера применения способа измерения, в соответствии с вариантом осуществления настоящего изобретения. В этом варианте осуществления, усовершенствованная сота может быть сотой, имеющей улучшенную функцию, или сотой на несущей нового типа, или новым типом несущей, что не ограничено в этом варианте осуществления. В этом варианте осуществления первый узел связи является, например, базовой станцией и второй узел связи является, например, UE, но настоящее изобретение не ограничивается этим. Способ включает в себя:
Этап 141: базовая станция получает информацию о конфигурации DRS соседней соты.
Информация о конфигурации DRS соседней соты может быть получена через интерфейс Х2 или другой интерфейс (например, беспроводный интерфейс) между двумя базовыми станциями, или с помощью ОАМ, где информация о конфигурации DRS описана ранее и, следовательно, подробное описание таковой не повторяется в настоящем документе.
В частности, во время установки интерфейса между базовыми станциями, базовая станция и соседняя базовая станция обмениваются, посредством приема типа несущей, которая является предназначенной для этого несущей соседней базовой станции и переданная соседней базовой станцией, информацией соты соответствующих сот, находящиеся в зоне покрытия базовой станции и соседней базовой станции, где информация соты включает в себя информацию такую как, полоса частот несущей, тип несущей, идентификатор соты (ID, идентификатор) и конфигурация сигнализации измерения соты.
Этот вариант осуществления описан ниже с помощью примера, где соединение устанавливается между базовой станцией 1 и базовой станцией 2 через интерфейс Х2.
Базовая станция 2 передает сообщение с запросом на установку интерфейса Х2 (запрос на установление Х2) на базовую станцию 1, где сообщение с запросом несет информацию соты и соседней соты, которые находятся в зоне покрытия базовой станции 2.
Базовая станция 1 отправляет сообщение ответа на установку интерфейса Х2 (ответ на установку Х2) на базовую станцию 2, где сообщение ответа несет информацию о соте и соседней соте, которая находятся в зоне покрытия базовой станции 1.
В другом аспекте, при установлении соединения через интерфейс S1, базовая станция 1 и базовая станция 2 могут выполнять обмен сигнализацией через узел управления мобильностью (ММЕ, узел управления мобильностью), так что базовая станция 1 и базовая станция 2 получают информацию соты соответствующих сот в зоне покрытия базовой станции и соседней базовой станции.
Этап 141 является опциальным этапом.
Этап 142: базовая станция определяет информацию измерения UE, где измерительная информация может включать в себя информацию обслуживающей соты UE и внутричастотную информацию соседней соты и межчастотную информацию соседней соты. Например, информация измерения включает в себя тип (общую несущую или несущую нового типа несущей) несущей, где находится сота, информация измерения (включающая в себя информацию о конфигурации измерений) и тому подобное.
Общая несущая в варианте осуществления настоящего изобретения представляет собой обычную обратно-совместимую несущую; и несущая нового типа представляет собой усовершенствованную обратно несовместимую несущую, которая может быть несущей нового типа NCT, то есть, новым типом несущей, предложенным в релизе 11 в 3GPP. NCT рассматривается как обратно несовместимая несущая, и действующий механизм может быть изменен, чтобы повысить эффективность несущей, например, повышения спектральную эффективность, улучшая поддержку и энергосбережение в гетерогенной сети или тому подобное.
Для достижения вышеупомянутых усовершенствованных характеристик, для UE обеспечивается информация измерения в варианте осуществления настоящего изобретения, которая может включать в себя: DRS, используемый для обнаружения и/или измерения соты; SS (включающая в себя PSS/SSS), используемая для обнаружения сот, где сигнализация является возможной; CSI-RS, в основном, используется для представления значения CSI, так что UE выполняет обнаружение и/или измерение соты, используя вышеупомянутую информацию.
Этап 143: базовая станция доставляет информацию измерения в устройство пользователя для передачи команды в устройство пользователя на измерение определенной соты.
В варианте осуществления настоящего изобретения, базовая станция может доставлять задание измерения (то есть, информацию об измерении) в устройство пользователя с использованием сообщения управления радиоресурсами (RRC, управление радиоресурсами), но настоящее изобретение не ограничивается этим.
Каждая задача измерения включает в себя: информацию объекта измерения (объект измерения) и информацию о конфигурации отчета (конфигурация), где информация объекта измерения используется для указания назначенной соты/несущей, которая должна быть измерена посредством UE, и информация о конфигурации отчета используется для определения информации о конфигурации для инициирования UE для передачи отчета об измерении в базовую станцию. Информация об объекте измерения и информация о конфигурации отчета являются информационными сообщения в задаче измерения, и базовая станция может предпочтительно добавить информацию указания опорного сигнала в информацию объекта измерения или информацию о конфигурации отчета, что не ограничивается в данном документе.
Информация об объекте измерения включает в себя комбинацию по меньшей мере одного из: идентификатора соседней соты, информации о конфигурации типа измерения, информации о конфигурации сигнализации измерения и информации о конфигурации отчета.
Обычная конфигурация соты, переданная базовой станцией в UE, является обычной конфигурацией измерения, основанной на CRS/CSI-RS; и базовая станция конфигурирует новый способ измерения для усовершенствованной соты.
Идентификатор соседней соты (не требуется в случае измерения RLM или CSI отчетности измерения) является комбинацией по меньшей мере одного из PCI, DRS (набор) идентификатор и CSI-RS (набор) идентификатор.
Новый способ измерения заключается в следующем: если измерительная задача включает в себя измерение RRM, UE выполняет измерение с использованием DRS; если задача измерения включает в себя CSI отчетность измерения, то UE выполняет измерение с помощью CSI-RS; и если измерительная задача включает в себя измерение RLM, то UE выполняет измерение с помощью DRS или CSI-RS.
Информация о конфигурации сигнализации измерения включает в себя: информацию о конфигурации DRS, если информация о конфигурации включает в себя информацию DRS антенного порта (где информация антенного порта может быть информацией о количестве антенн и/или номер порта антенны), информацию о конфигурации ресурсов в частотной области, информацию о конфигурации ресурсов кодового домена, информацию о конфигурации субкадра (включающую в себя информацию сдвига субкадра и информацию периода) и отношение, измеренное UE, мощности передачи в PDSCH к той, что в DRS. Информация измерения может дополнительно включать в себя: информацию синхронизации измеренной соты, такую как SFN сдвиг/сдвиг субкадра/сдвиг символов. Кроме того, конфигурация DRS может быть целым набором субкадра или подмножеством DRS субкадра. Когда измеряемая сота имеет конфигурацию ABS, UE может выполнять измерения с помощью пересечение набора конфигурации измерения и доставленного набора ограниченных измерений.
Значение периода измерений, поступившее из нижнего уровня на более высокий уровень, добавляется в информацию о конфигурации отчета. Возможно, для этого значения, необходимо учесть точность и период передачи DRS. Как показано на фиг. 15, где фиг. 15 представляет собой принципиальную схему значения периода отчетности измерения в соответствии с вариантом осуществления настоящего изобретения.
Как показано на фиг. 15, сота 1 и сота 2 посылают DRS и SSs (сигнал синхронизации), сигнал плотности DRS в блоке субдкадра соты 1 выше, измерение, выполняемое с использованием одного субкадра, может удовлетворить требованию точности измерения; поэтому период отчетности измерения на более высокий уровень равен 3 мс. Сигнал плотности DRS в блоке субкадра соты 2 ниже, и измерение, выполненное с помощью двух субкадров, может удовлетворить требованию точности измерения; поэтому, период отчетности измерения на более высокий уровень равен 4 мс. DRS, переданные сотой 3 и сотой 4, также имеют функцию сигнала синхронизации, плотность сигнала DRS в блоке субкадра соты 3 выше, и измерение, выполненное с помощью одного субкадра, может удовлетворить требование точности измерения; поэтому, период отчетности измерения на более высокий уровень равен 1 мс. Плотность сигнала DRS в блоке субкадра соты 4 ниже, и измерение, выполненное с помощью двух субкадров, может удовлетворить требование точности измерения; Поэтому, период отчетности измерения на более высокий уровень равен 2 мс.
В этом варианте осуществления, вышеописанное сообщение о конфигурации измерения может дополнительно включать в себя информацию указания измерения измеренной соты, такую как m-RSRP информацию указания измерения и/или информацию указания измерений m-RSRQ (m может быть CRS, CSI- RS и/или DRS); вышеописанное сообщение о конфигурации измерения может дополнительно включать в себя информацию указания способа отчетности измерения, используемую для передачи команды в UE на выполнение либо периодической отчетности об измерении, или событийной отчетности об измерении на измеряемой соте. Если способ отчетности, указанный информацией указания способа отчетность измерения, является событийным способом отчетности об измерении, то информация измерения может дополнительно включать в себя значение конфигурации гистерезиса и время гистерезиса, максимальное количество измеренных сот, которые могут быть представлены и количество сообщений отчетности и/или другие параметры вспомогательного конфигурации, такие как параметр гладкой фильтрации уровня 3. Если способ отчетности, указанный информацией указания способа отчетности измерения, является периодической отчетностью об измерении, то сообщение о конфигурации измерения может дополнительно включать в себя период отчета конфигурации. Конечно, вышеуказанные параметры могут также быть сконфигурированы в UE по умолчанию, не ограничивается в этом варианте осуществления.
Этап 144: UE измеряет, в соответствии с полученной информацией измерения, сигнал конфигурации, соответствующий измеренной соты, для получения результата измерения, и сообщает результат измерения на базовую станцию.
После приема информации измерения, переданной базовой станцией, UE может различать, в соответствии с разницей в информации о конфигурации RS измеренной соты и/или конфигурации идентификаторов (например, информация порта антенны или конфигурации индекса числа CSI-RS/DRS информации о конфигурации) измеренных сот в информации об измерениях, различные измеренные соты, указанные тем же физическим идентификатором соты, и выполнить операцию измерения. UE может измерять соответствующую измеряемую соту, с помощью информации о конфигурации сигнализации измеряемой соты, для получения результата измерения измеряемой соты, такие как DRS-RSRP и/или DRS-RSRQ измеренной соты. Кроме того, UE может связывать результат измерения по меньшей мере одного из информацию о конфигурации сигнализации в сообщении о конфигурации измерения, конфигурацию идентификатора измеряемой соты и индексный номер измерений. При фактическом применении, UE может периодически измерять измеряемую соту и сообщать результат измерения измеряемой соты. Если сообщение о конфигурации измерения, принятое UE, включает в себя информацию указания измерения, такую как m-RSRP информацию указания измерения и/или информацию указания измерений m-RSRQ, то UE может получить, согласно информации индикатора измерения, измеренное значение, затребованное базовой станцией, и сообщать измеренное значение на базовую станцию в качестве результата измерения. Например, если информация об измерении, отправленное базовой станцией, включает в себя информацию указания измерения D-RSRP, то UE получает D-RSRP измеренной соты; и если информация измерения включает в себя информацию указания измерения D-RSRQ, то UE получает D-RSRQ измеренной соты.
Этап 145: базовая станция принимает отчет об измерении, направленный пользовательским устройством, где отчет об измерении включает в себя результат измерения, который получен пользовательским устройством путем измерения назначенной соты/несущей в соответствии с задачей измерения; и управляет UE согласно отчету измерения.
После получения отчета об измерениях, базовая станция может определить качество сигнала и уровень сигнала назначенной соты/несущей в соответствии с результатом измерения, так что базовая станция управляет пользовательским устройством и назначенной сотой/несущей. Например, базовая станция определяет, следует ли добавить новую несущую для устройства пользователя, добавить соту в набор СОМР или поддерживать назначенную соту/несущую; или определяет сценарий межсотовой передачи обслуживания.
Альтернативно, после получения отчета об измерениях, базовая станция может определить качество сигнала UE в обслуживающей соте/несущей (набор) в соответствии с результатом измерения, так что базовая станция определяет механизм планирования для устройства пользователя.
Фиг. 16 является другой блок-схемой алгоритма способа измерения соты в соответствии с вариантом осуществления настоящего изобретения. Способ включает в себя:
Этап 161: первый узел связи передает информацию измерения во второй узел связи, где информация о конфигурации сигнала измерения включает в себя информацию о конфигурации DRS.
Информация о конфигурации DRS включает в себя по меньшей мере один из следующих компонентов: конфигурацию индекса идентификатора DRS, информацию антенного порта (может включать в себя количество антенн и/или номер порта антенны), информацию о конфигурации ресурса частотного домена, информацию о конфигурации кодового домена, информацию о конфигурации субкадра, информацию шаблона на блок ресурса, и отношение мощности передачи физического общего нисходящего канала (PDSCH) к DRS. Информация о конфигурации ресурса частотного домена, информация о конфигурации ресурсов в кодовой области, информация о конфигурации субкадра и информация шаблона на блок ресурса идентичны тем, которые описаны в предшествующем варианте осуществления, и поэтому подробное описание таковых не повторяется в настоящем документе.
Информация о конфигурации субкадра может включать в себя, но не ограничивается этим, информацию сдвига субкадра и информацию периода, и может дополнительно включать в себя другую информацию, которая не ограничивается этим вариантом осуществления.
Возможно, информация о конфигурации DRS может дополнительно включать в себя: информацию синхронизации, где информация синхронизации содержит по меньшей мере одно из следующих: сдвиг числа кадра радиосвязи, сдвиг субкадра и сдвиг временного символа.
Информация о конфигурации DRS может быть передана первым узлом связи на второй узел связи с помощью выделенной сигнализации, и также может быть передана с помощью системного сообщения. Информация, содержащаяся в информации о конфигурации DRS, включает в себя информацию о конфигурации DRS соты/частоты первого узла связи, и может дополнительно включать в себя информацию о конфигурации DRS другой соседней соты/частоты.
Информация о конфигурации DRS используется вторым узлом связи для обнаружения соты, соответствующей информации о конфигурации DRS; или
информация о конфигурации DRS используется вторым узлом связи для обнаружения соты, соответствующей информации о конфигурации DRS, и дополнительно для измерения соты, соответствующей информации о конфигурации DRS; или
информация о конфигурации DRS используется вторым узлом связи для измерения соты, соответствующей информации о конфигурации DRS.
Этап 162: Второй узел связи выполняет обнаружение и/или измерение соты в соответствии с информацией о конфигурации DRS, переданной первым узлом связи, и передает отчет об измерении в первый узел связи, где отчет об измерении несет результат измерения и/или по меньшей мере одно из соответствующего индекса числа информации о конфигурации DRS, информации об измеренной соте и также информации об измеренной частоте.
Этап 163: После приема отчета об измерениях, который содержит информацию о DRS, и переданного вторым узлом связи, первый узел связи непосредственно выполняет операцию хендовера второго узла связи в соте, соответствующей информации о конфигурации DRS или доставляет соответствующую информацию о конфигурации CRS и/или информацию о конфигурации CSI-RS DRS измеренной соты/частоты на второй узел связи.
Этап 164: Второй узел связи выполняет измерение соты в соответствии с полученной информацией о конфигурации CRS и/или информацией о конфигурации CSI-RS, и посылает отчет об измерении в базовую станцию, где отчет об измерении несет результат измерения и/или, по меньшей мере, одно из соответствующего индекса числа информации о конфигурации DRS, номера индекса информации о конфигурации CRS и/или информации о конфигурации CSI-RS, информации об измеренной соте и информации об измеренной частоте.
На этапе 163, если второй узел связи непосредственно работает в режиме передачи обслуживания в соте, соответствующей информации о конфигурации DRS, то процесс заканчивается.
Вариант осуществления настоящего изобретения может быть применен к системе связи СоМР, где система связи включает в себя множество взаимосвязанных точек доступа или точек передачи, такие как базовые станции, где эти базовые станции могут быть макро базовыми станциями (Макро, eNB или eNB), микро базовыми станциями (может быть пико, релейными, HeNBs, HNBs или RRHs) или т.п., которые не ограничивается в данном документе. Так или иначе, каждая из базовых станций представляет собой объект или точку передачи.
В варианте осуществления настоящего изобретения, eNB используется в качестве примера для представления макро базовой станции, соответствующей макросоте, и RRH используется в качестве примера для представления микро базовой станции, соответствующей микросоте. Как правило, система беспроводной связи может включать в себя однородную систему сетевых коммуникаций и гетерогенную систему сетевых коммуникаций, где взаимосвязанные базовые станции в однородной системе сетевых коммуникаций являются макро базовыми станциями и взаимосвязанные базовые станции в гетерогенной системе сетевых коммуникаций могут быть базовыми станциями макросоты и базовыми станциями микросоты. Все базовые станции в вышеизложенной системе связи СоМР вместе обеспечивают услуги для терминала, когда терминал обычно относится к UE (пользовательское устройство) или может быть обозначен как пользовательский терминал или терминал.
В вариантах реализации настоящего изобретения, UE может быть любым из следующего и может быть статическими или мобильным. Статическое UE может конкретно включать в себя терминал, мобильную станцию (мобильная станция), абонентское устройство (абонентское устройство), станцию (станция) или тому подобное. Мобильное UE может конкретно включать в себя сотовый телефон (сотовый телефон), персональный цифровой помощник (PDA), беспроводной модем (модем), беспроводное коммуникационное устройство, портативное устройство (карманное устройство), портативный компьютер (ноутбук), беспроводной телефон (беспроводной телефон), станцию беспроводного абонентского доступа (WLL) или тому подобное. UEs могут быть распределены по всей беспроводной сети.
Следует отметить, что в этом документе относительные термины, такие как первый и второй и т.п., могут использоваться исключительно для различения одной сущности или действия от другого объекта или действия, без обязательного требования или подразумевающее такое фактическое отношение или порядок между такими объектами или действиями. Термины "включает в себя", "включающий в себя" или любой другой их вариации, предназначены для охвата неисключительного включения, так что процесс, способ, изделие или устройство, которое включает в себя список элементов, не включают в себя только те элементы, но могут включать в себя другие элементы, не перечисленные явно или присущие такому процессу, способу, изделию или устройству. Элемент, предпереданный фразой "включает в себя..." без нескольких ограничений, не исключает наличие дополнительных идентичных элементов в процессе, способе, изделии или устройстве, которое включает в себя элемент.
В соответствии с вышеупомянутым описанием способов реализации, специалист в данной области техники может ясно понимать, что настоящее изобретение может быть реализовано посредством программного обеспечения и необходимой универсальной аппаратной платформы и, безусловно, также может быть реализовано с помощью аппаратных средств. Тем не менее, в большинстве случаев, последнее является предпочтительным способом реализации. На основании такого понимания, технические решения настоящего изобретения, по существу, или в части, используя предшествующий уровень техники, могут быть реализованы в виде программного продукта. Компьютерный программный продукт может храниться на машиночитаемом носителе информации, например, ROM/RAM, магнитном диске или оптическом диске, и включает в себя несколько команд для управления функционированием компьютерного устройства (который может представлять собой персональный компьютер, сервер или сетевое устройство) для выполнения способов, описанных в вариантах осуществления или некоторых частей вариантов осуществления настоящего изобретения.
Предпочтительные варианты осуществления настоящего изобретения были описаны выше. Следует отметить, что специалист в данной области техники может выполнить модификации и вариации без отхода от принципов настоящего изобретения, которые должны быть истолкованы как подпадающие под объем правовой охраны настоящего изобретения.
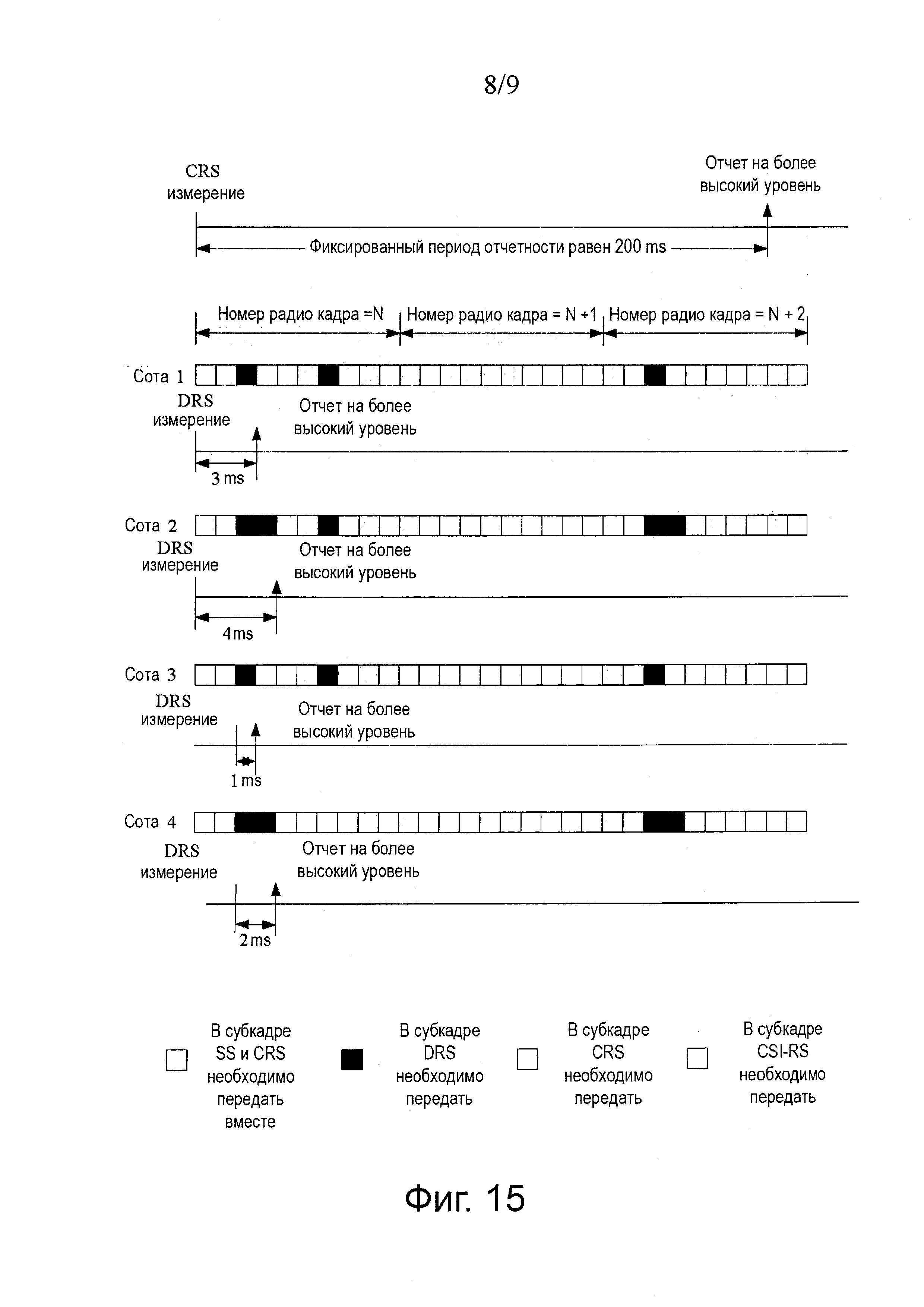
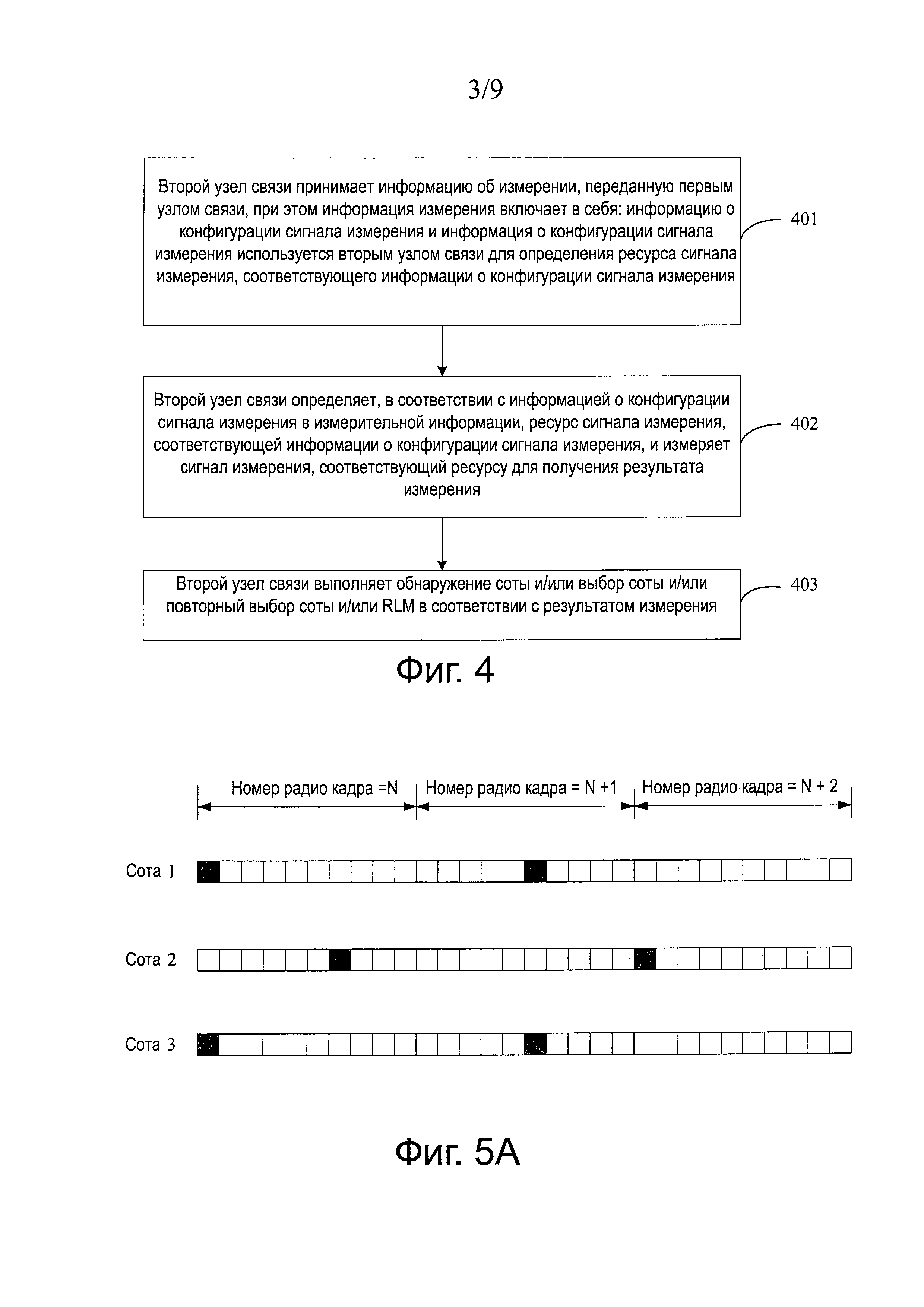
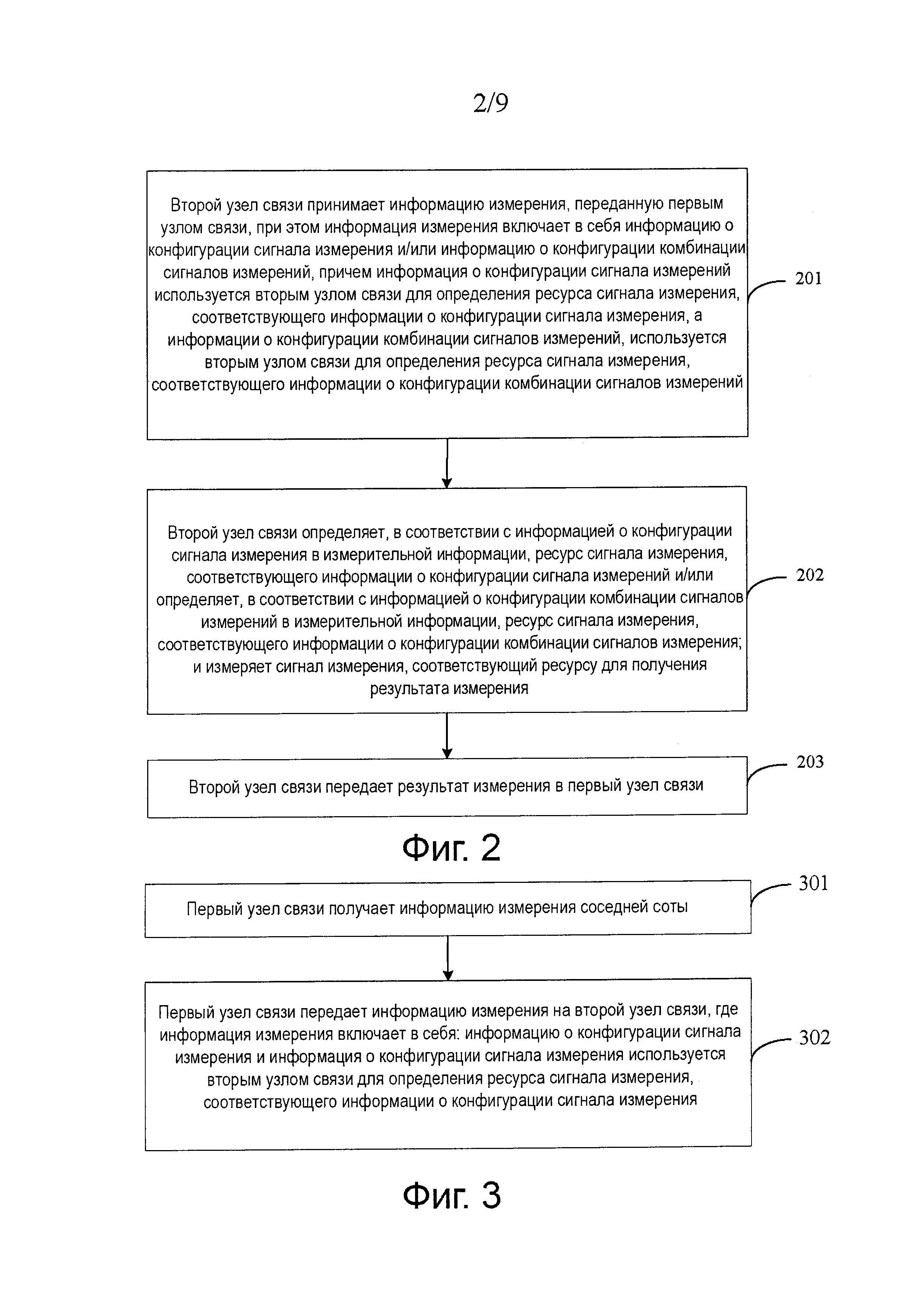
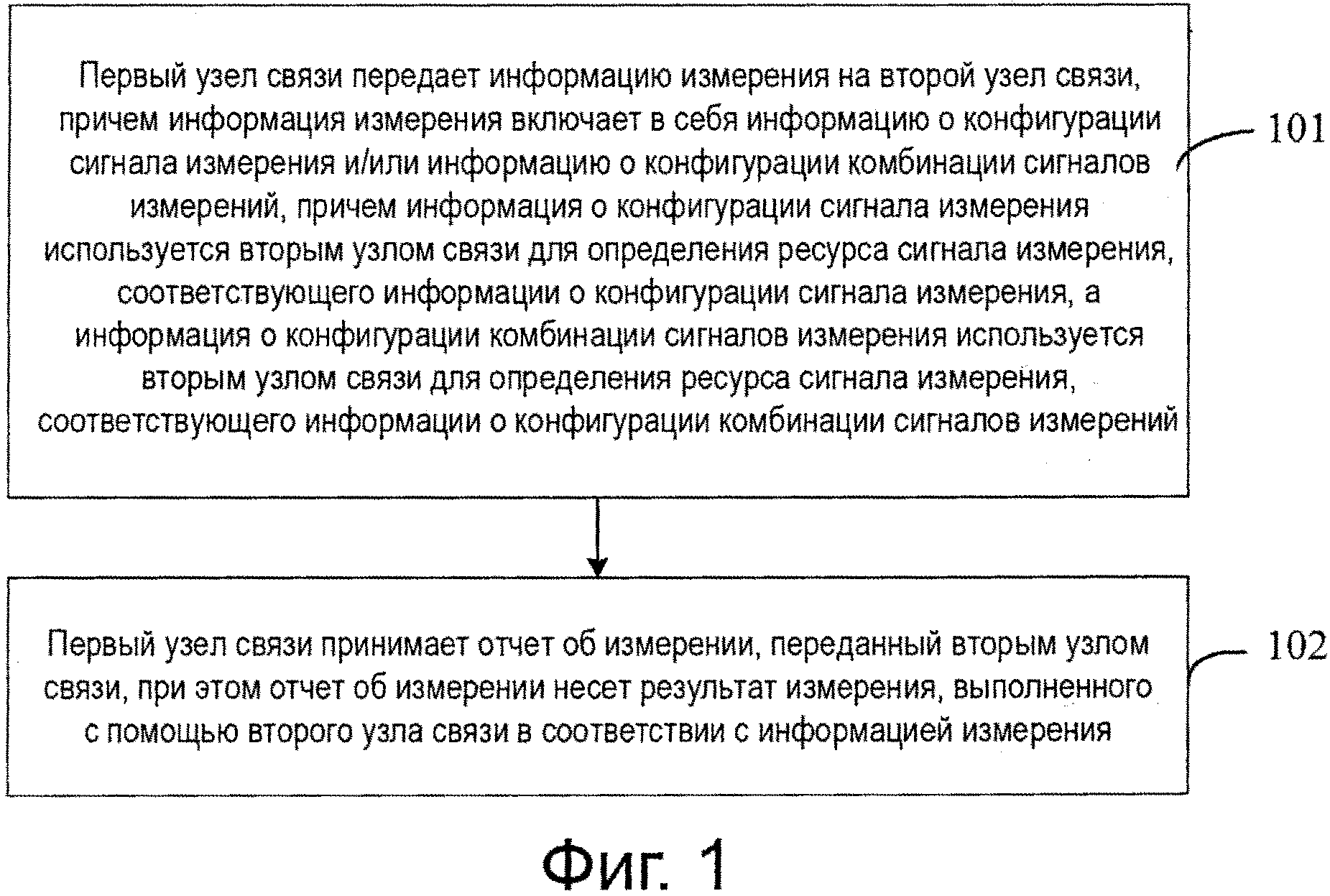
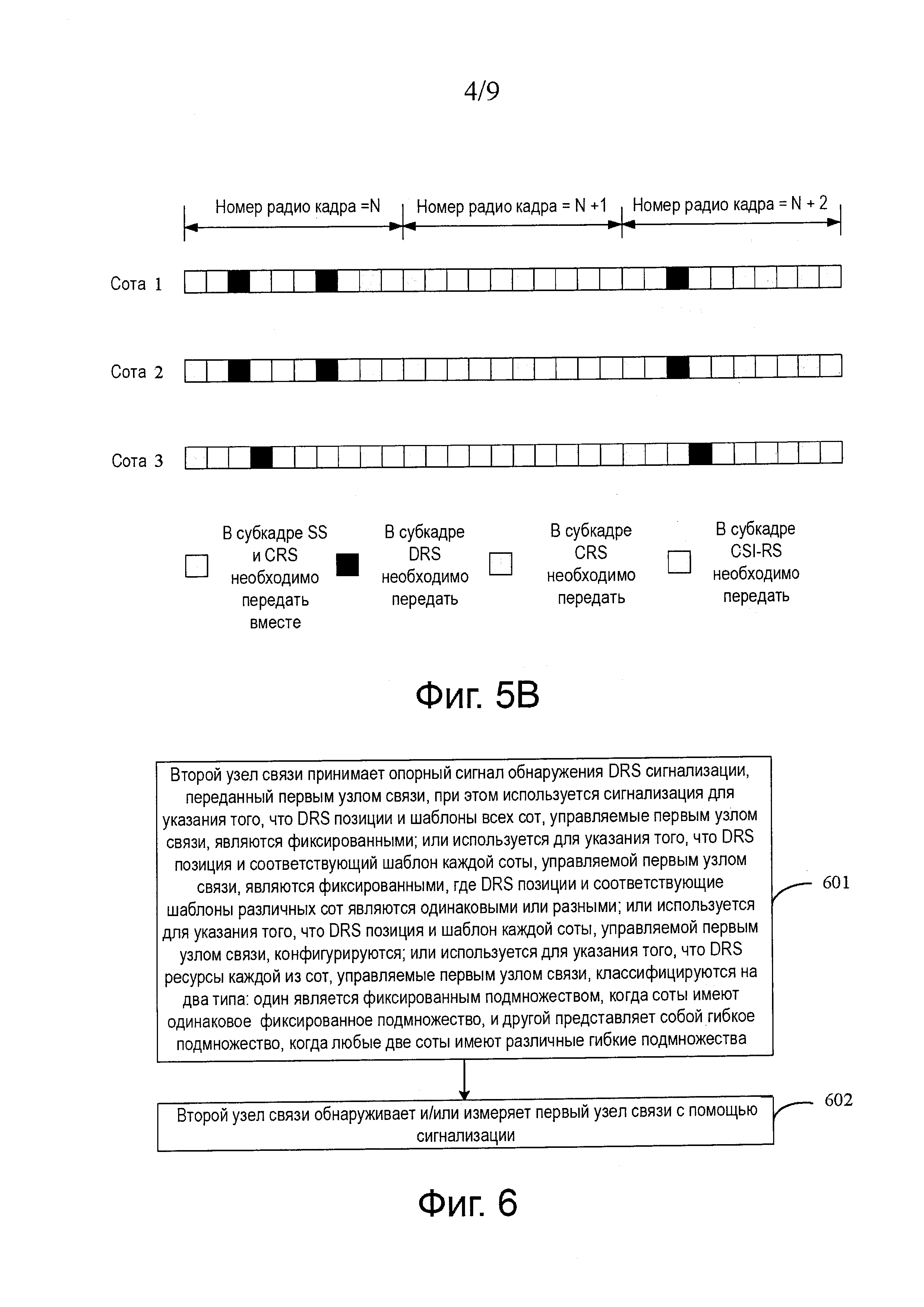
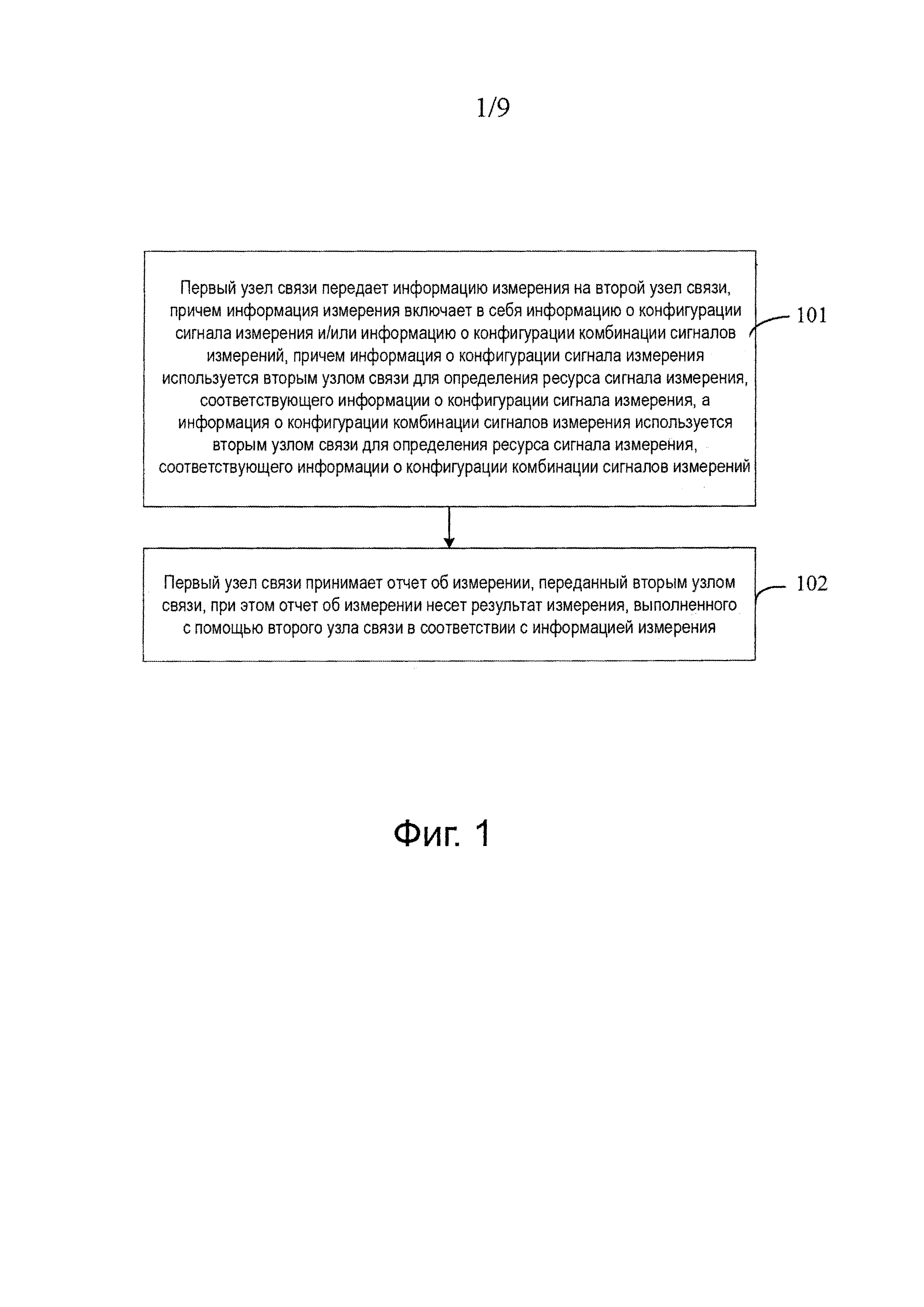
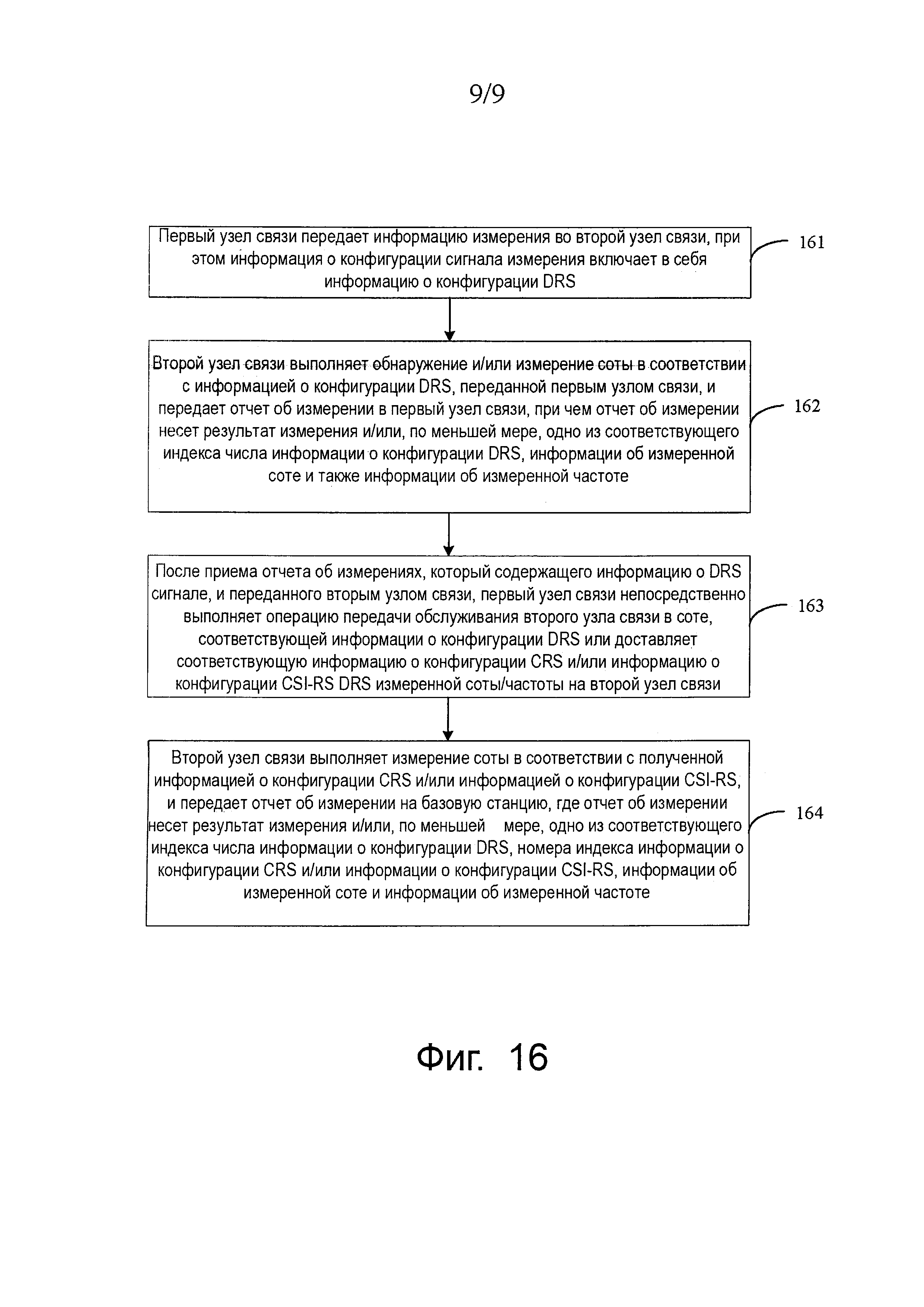
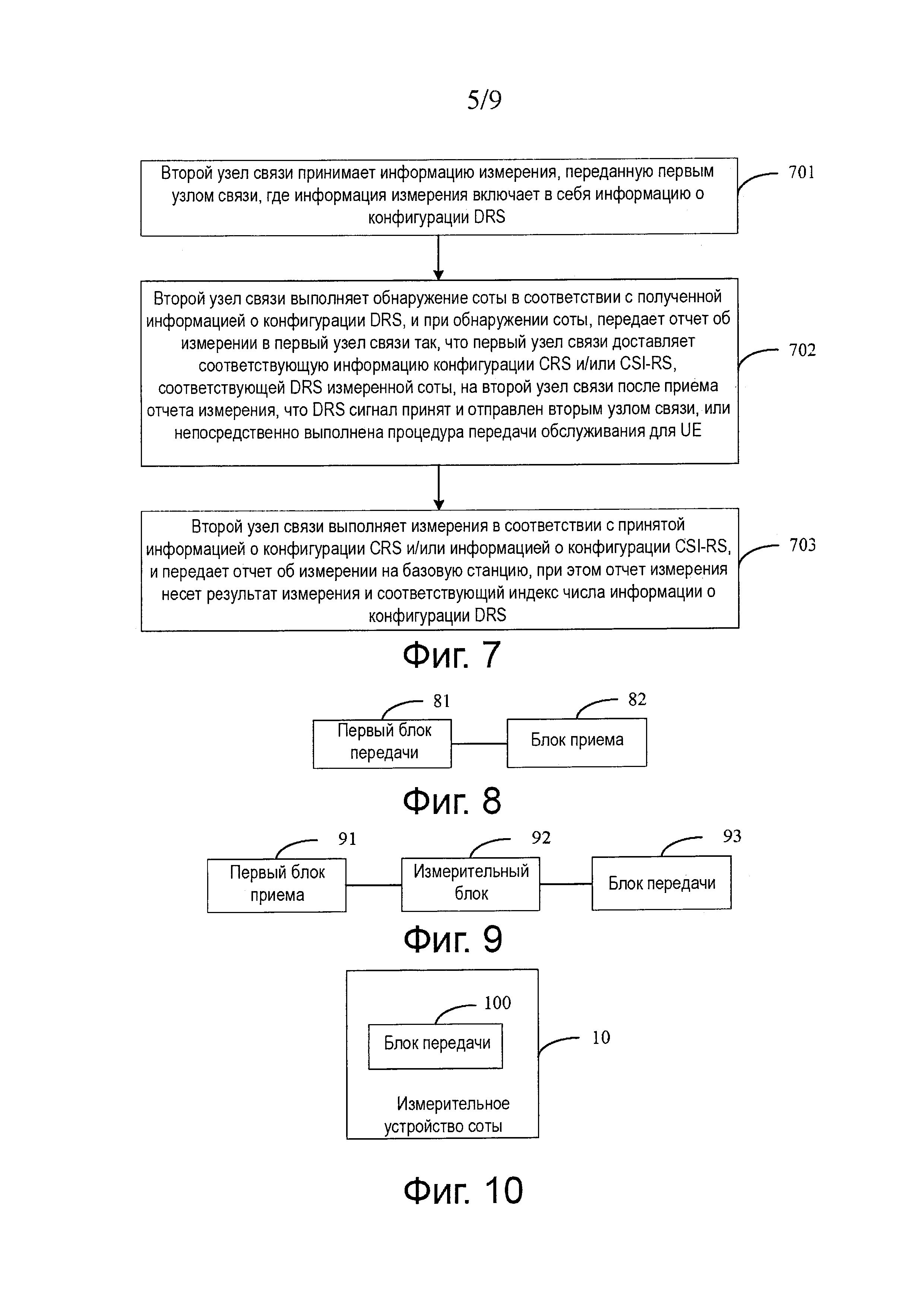
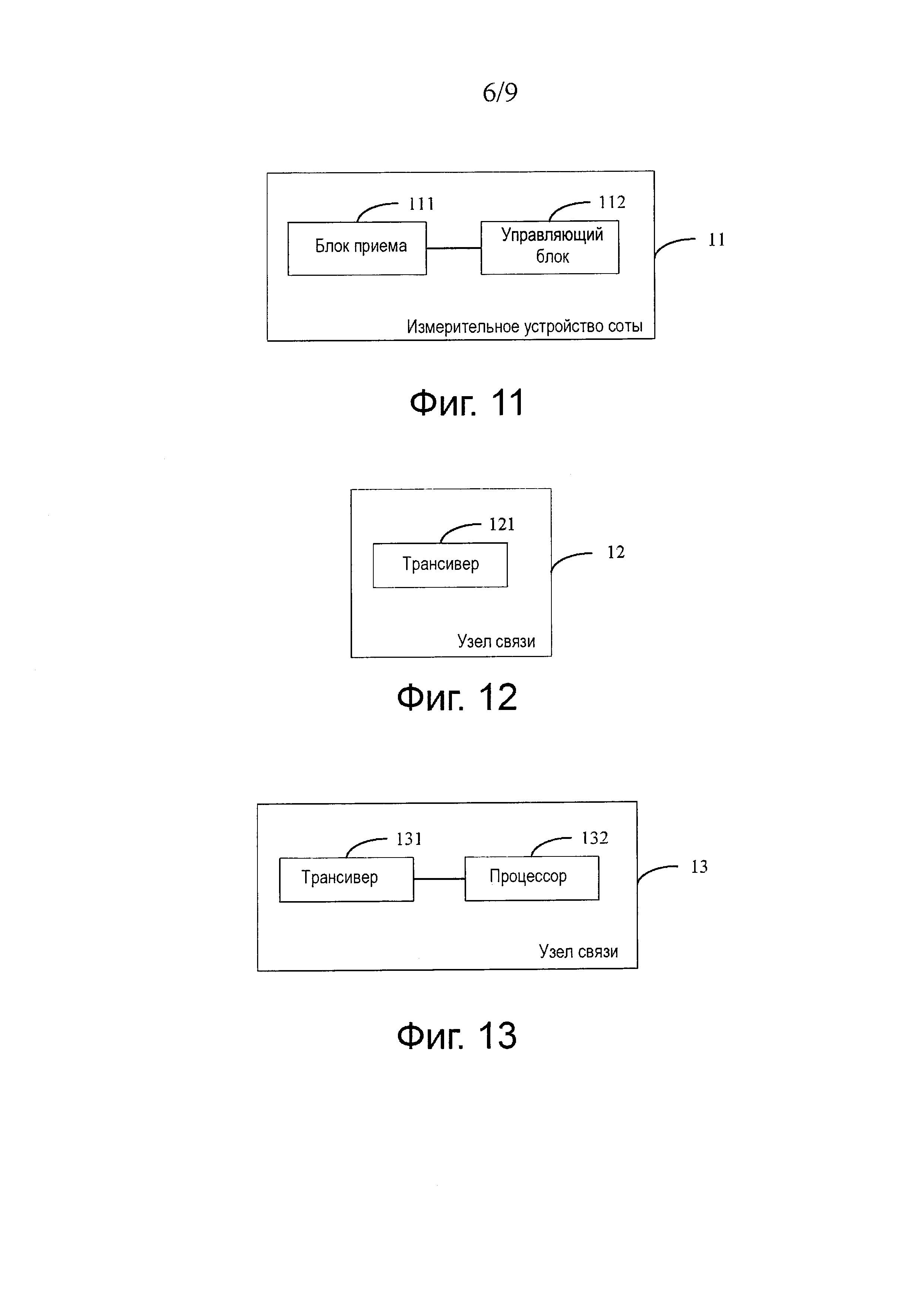
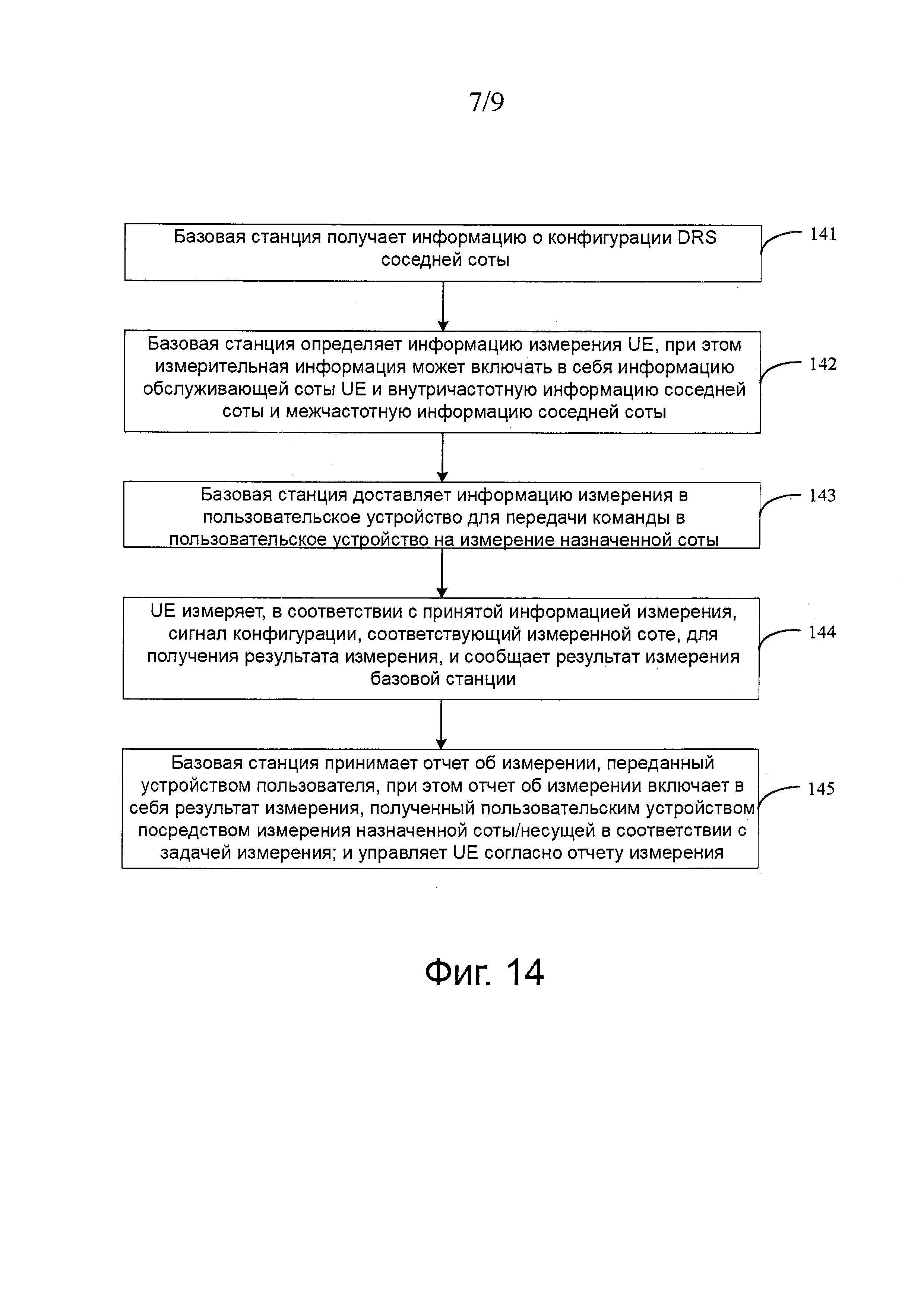
Способ и устройство для передачи сигнала cpri посредством коаксиальной линии
Способ и система сбора данных результатов измерений для терминала
Способ и устройство реализации временной синхронизации
Система и способ связи в системах связи с ретрансляционными узлами
Инкапсуляция адреса асимметричной сети
Способ предсказания при кодировании или декодировании и предсказывающее устройство
Сетевой объект и способ предоставления услуги для пользовательских объектов в сети связи
Способ, система, абонентское оборудование и базовая станция передачи восходящей управляющей информации
Способ, устройство и система передачи данных
Система и способы для формирования диаграммы направленности в самоорганизующейся сети (son)
Способ и устройство для передачи сигнала cpri посредством коаксиальной линии
Способ и система сбора данных результатов измерений для терминала
Способ и устройство реализации временной синхронизации
Система и способ связи в системах связи с ретрансляционными узлами
Инкапсуляция адреса асимметричной сети
Способ предсказания при кодировании или декодировании и предсказывающее устройство
Сетевой объект и способ предоставления услуги для пользовательских объектов в сети связи
Способ, система, абонентское оборудование и базовая станция передачи восходящей управляющей информации
Способ, устройство и система передачи данных
Система и способы для формирования диаграммы направленности в самоорганизующейся сети (son)

