АДАПТИВНЫЙ СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано для определения абсолютных перемещений объектов, например, в металлургии, автомобильной промышленности, крановой технике, складской и производственной логистике, при автоматизации производства в целом.
При расширении масштабов решаемых задач на производстве важную роль играет повышение эффективности производственных процессов, которое достигается в том числе за счет обеспечения таких технических характеристик, как скорость и точность определения положения объектов в разные периоды времени на территории производственного помещения.
Однако обеспечение высокой точности определения положения объекта является сложной производственной задачей ввиду зависимости данного технического параметра от точности и трудоемкости расстановки источников сигналов вдоль траектории движения объекта в том числе при наличии на пути следования объекта трудно устранимых препятствий.
Известен способ определения положения объекта (http://files.pepperl-fuchs.com/selector_files/navi/productInfo/doct/tdoct3785_eng.pdf, с. 9), заключающийся в том, что на электронной головке с одной стороны размещают ряд излучателей, с другой стороны - ряд приемников, устанавливают электронную головку на объект, вдоль траектории движения объекта размещают ленту, имеющую разное количество прорезей, расположенных на разном расстоянии (то есть имеющую уникальное кодирование), при движении объекта вдоль ленты с уникальным кодированием принимают выходной сигнал с приемников о положении объекта.
Указанный способ предполагает установку линейки с прорезями, которая должна быть непрерывной при проведении измерения. Процесс установки длинной непрерывной линейки трудоемкий, занимает много времени и не всегда возможен из-за наличия преград вдоль траектории движения объекта. Также данный способ измерения предполагает ровное движение объекта без скачков и вибраций, что не всегда реализуемо.
Известен способ определения положения объекта (https://www.sick.com/media/dox/9/69/969/Mountinq_instructions_POMUX_KH53_РОМ UX_KH53_Advanced_de_en_IM0011969.PDF), принятый за наиболее близкий аналог к заявляемому способу, заключающийся в том, что вдоль траектории движения постоянные магниты размещают последовательно и согласно их номерам, соблюдая при этом равное расстояние между ними, далее преобразователь устанавливают на объект, направляют сигнал на объект с преобразователем, принимают выходной сигнал с преобразователя о положении пронумерованных источников сигнала, определяют положение объекта.
Указанный способ предполагает расстановку источников сигналов с заранее заданным положением вдоль траектории и строгим соблюдением одинакового расстояния между ними, то есть точность измерения положения объекта в данном случае зависит от точности такой расстановки источников сигнала: любое отклонение от необходимого положения приводит к накоплению погрешности при движении объекта вдоль траектории. Также при наличии препятствий на пути следования необходимо использовать несколько систем, реализующих указанный способ, что значительно усложняет и удорожает производство. При этом на самом участке, где располагается препятствие, измерение положения объекта не осуществляется. К тому же, в случае выхода из строя какого-либо источника сигнала, необходимо произвести его замену на строго аналогичный источник сигнала, что делает способ не всегда удобным в использовании.
Следует отметить, что вышеуказанные способы измерения перемещений объекта используют один конкретный тип источников сигнала и соответствующий им тип преобразователей.
Задачей изобретения является создание адаптивного способа измерения перемещений объекта, при котором могут быть использованы разные типы источников сигнала и преобразователей, обеспечение проведения измерений при наличии препятствий на траектории движения объекта, упрощение процесса расстановки источников сигнала вдоль траектории движения объекта.
Техническим результатом является повышение точности измерения перемещений объекта при наличии препятствий на траектории его движения за счет исключения накопления погрешности при расстановке источников сигнала.
Технический результат достигается при использовании адаптивного способа измерения перемещений, заключающегося в том, что преобразователь устанавливают на объект, используют отдельные источники сигналов с уникальным кодированием и/или формируют группы источников сигнала с уникальным кодированием, расставляют отдельные источники сигналов с уникальным кодированием и/или сформированные группы источников сигнала с уникальным кодированием случайным образом вдоль траектории перемещения объекта на любом расстоянии между любыми двумя последовательно установленными отдельными источниками сигнала с уникальным кодированием и/или между любыми двумя сформированными группами источников сигнала с уникальным кодированием, не превышающим диапазон измерения преобразователя, направляют сигнал на движущийся объект с преобразователем, принимают выходной сигнал с преобразователя о положении отдельных источников сигналов с уникальным кодированием и/или групп источников сигнала с уникальным кодированием, определяют положение объекта.
Группы источников сигнала с уникальным кодированием получают за счет изменения количества источников сигнала, и/или изменения расстояния между любыми двумя источниками сигнала, и/или изменения видов используемых источников сигнала.
Отдельные источники сигналов с уникальным кодированием и/или группы источников сигнала с уникальным кодированием могут быть расположены в том числе вдоль траектории перемещения объекта на равном расстоянии между любыми двумя последовательно установленными отдельными источниками сигнала с уникальным кодированием и/или между любыми двумя сформированными группами источников сигнала с уникальным кодированием, не превышающим диапазон измерения преобразователя.
Отдельные источники сигнала с уникальным кодированием и/или группы источников сигнала с уникальным кодированием, определяемым изменением количества источников сигнала, и/или изменением расстояния между любыми двумя источниками сигнала, и/или изменением видов используемых источников сигнала, позволяют получить множество неповторяющихся комбинаций источников сигнала, место установки которых определяется не координатой с возможными отклонениями, вызванными погрешностью такой установки, как это имело место у аналогов, а максимальным диапазоном измерения преобразователя: чем больше номинальный диапазон измерения преобразователя, тем больше диапазон возможной установки двух подряд стоящих отдельных источников сигнала с уникальным кодированием и/или двух подряд стоящих групп источников сигнала с уникальным кодированием. Таким образом, на каждом участке траектории, не превышающем диапазон измерения преобразователя, случайным образом на любом расстоянии должно находиться не менее одного источника сигнала с уникальным кодированием или одной группы источников сигнала с уникальным кодированием, что упрощает процедуру их расстановки, обеспечивает однозначную идентификацию положения преобразователя в любой момент времени, позволяет максимально точно определить положение объекта при его движении, повысить точность измерения перемещений объекта. Также данный способ можно использовать при наличии на траектории движения объекта препятствий, длина которых не превышает диапазона измерения преобразователя, и использовать при этом только одну систему, реализующую заявляемый способ.
Использование отдельных источников сигнала с уникальным кодированием и/или формирование групп источников с уникальным кодированием, а также их размещение случайным образом на участках траектории позволяет определять не только положение и перемещение объекта, но и безошибочно идентифицировать номера отдельных источников сигнала с уникальным кодированием и/или групп источников сигналов и другие их параметры в случае необходимости.
Группы источников сигналов с уникальным кодированием могут представлять собой заранее сформированные блоки с корпусом, внутри которых расположены отдельные источники сигнала, расстановка которых определяется изменением количества источников сигнала, и/или изменением расстояния между любыми двумя источниками сигнала, и/или изменением видов используемых источников сигнала.
В качестве отдельных источников сигнала с уникальным кодированием могут быть использованы чипы, кодоносители, метки, являющиеся частью системы радиочастотной идентификации.
В качестве источников сигнала при формировании групп могут быть использованы, например, магниты, световые источники, источники тепла, источники радиации любого вида, источники кинетической энергии, источники давления, ультразвуковые волны, материал, обладающий индукционными и/или емкостными физическими свойствами, т.е. виртуально любой материал, источник с кодированной информацией (например, штрихкоды, а также 2D-коды, 3D-коды nD-коды (где n - целое число) в случае, если группа источников сигнала включает источники сигнала разного типа, каждый имеющий свою ось измерения). Также уникальность источника сигнала может обеспечиваться с помощью уникальной мощности излучения каждого отдельного (однотипного) источника сигнала.
В качестве преобразователей могут быть использованы, например, датчики Холла, фотоэлементы, магнитострикционные преобразователи, индуктивные и емкостные преобразователи, радиочастотные преобразователи, радиационные преобразователи, преобразователи давления и другие преобразователи различной энергии.
Также в качестве преобразователей могут быть использованы компоненты системы идентификации такие, как считыватель (процессор) и подключенная к нему или встроенная антенна (радар, головка чтения/записи), в качестве источников сигнала при этом будут выступать метки (чипы, кодоносители).
Обработка выходного сигнала с преобразователя обеспечивается соответствующей аппаратурой в зависимости от применяемых типов источников сигнала и преобразователей. Информация для обработки может быть передана по различным интерфейсам и протоколам, например по аналоговому интерфейсу, TCP/IP, Ethernet TCP/IP, UDP, EtherCAT, Ethernet, Varan, Profinet, IO-Link, ASInterface, Profibus, DeviceNet, CANopen, RS232, RS422, RS485.
При использовании данного способа возможно с высокой точностью получить информацию о месте и времени нахождения объекта в производственном процессе, что повышает эффективность управления производством.
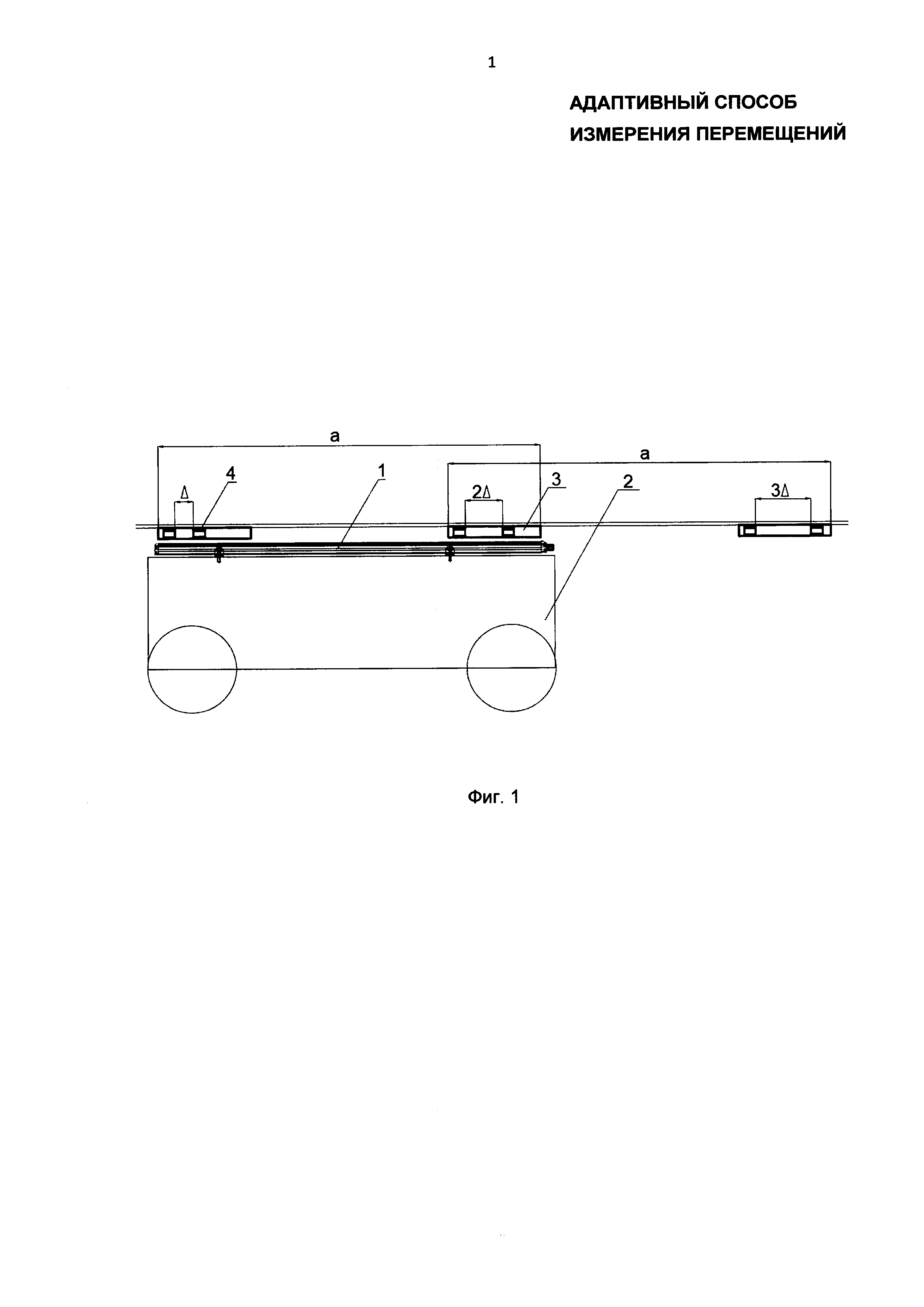
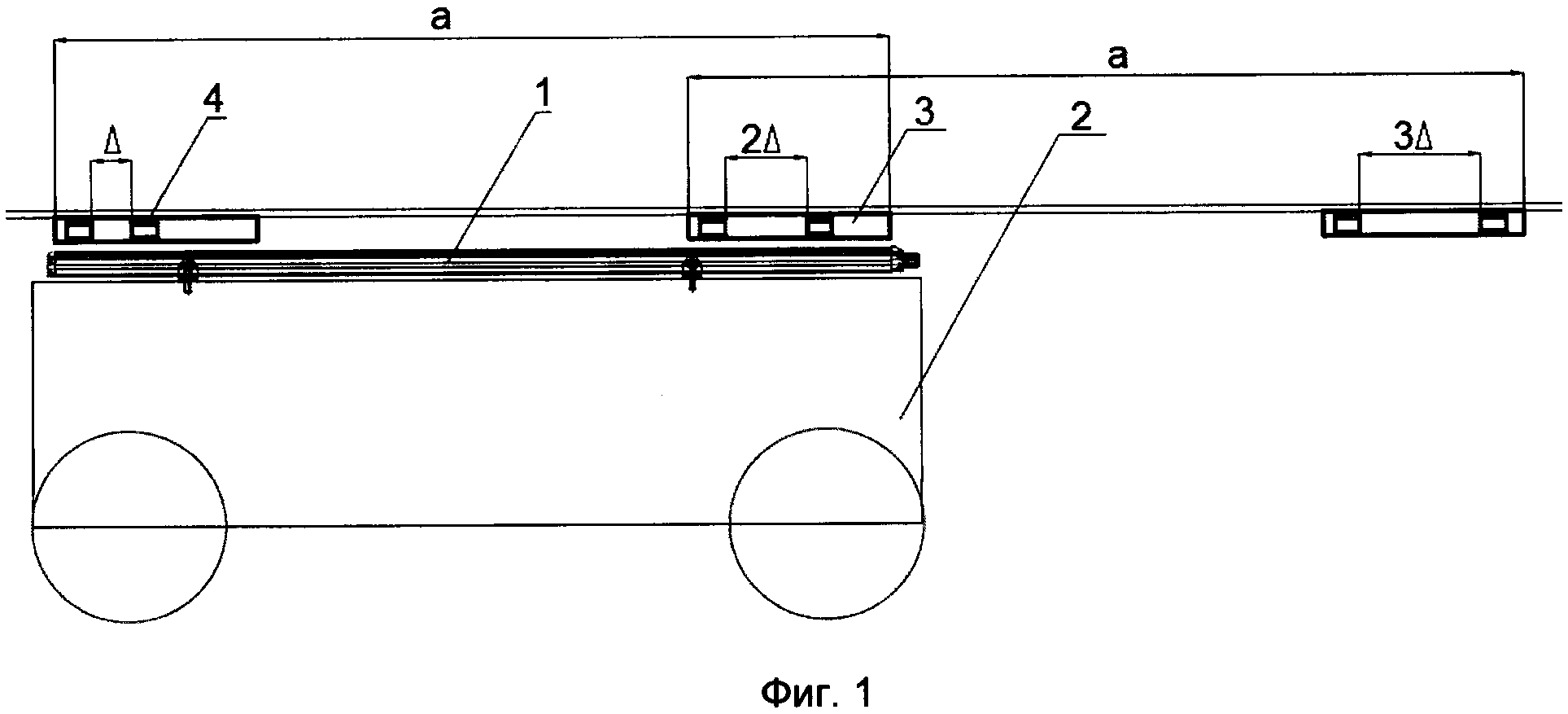
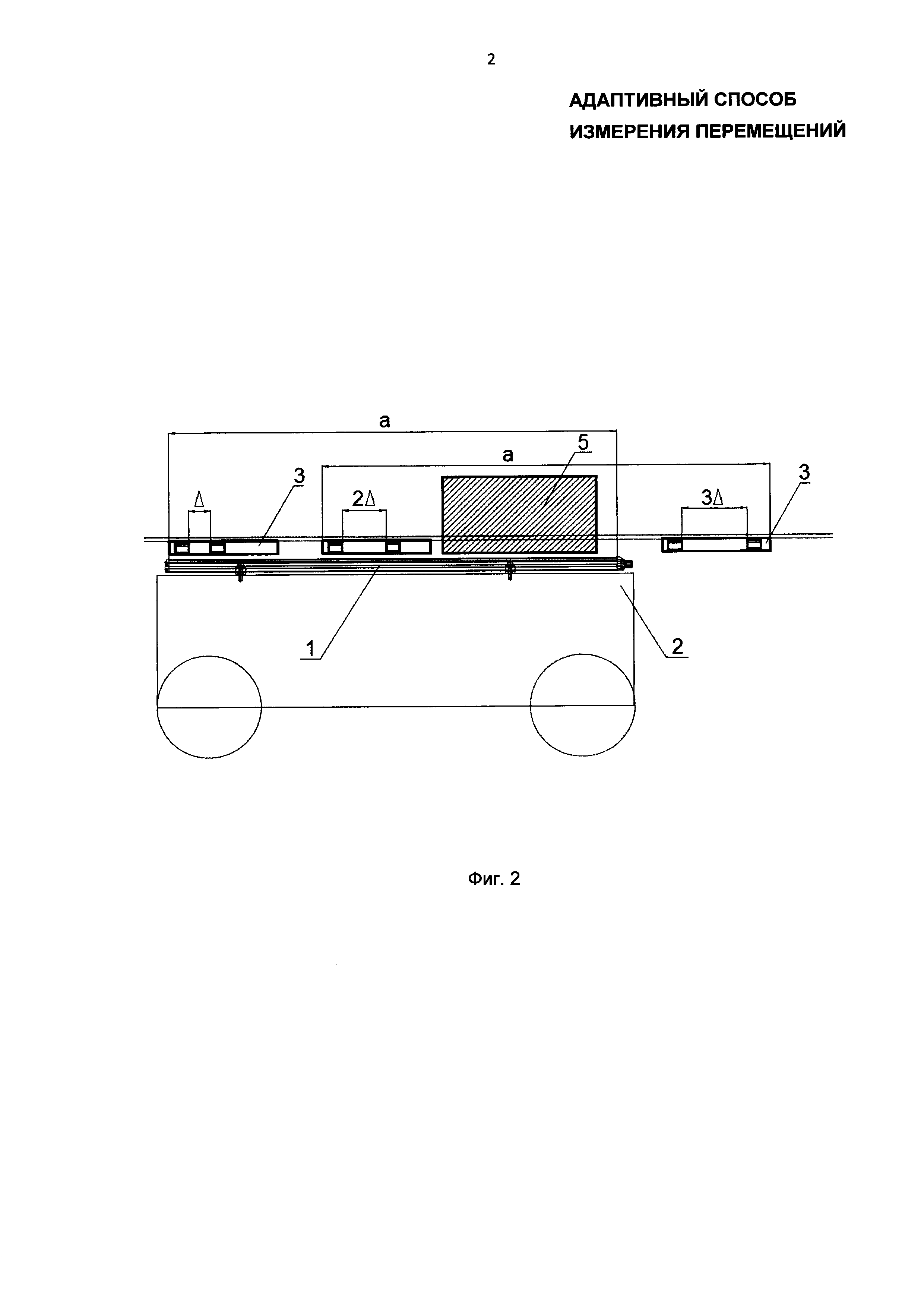
На фиг. 1 изображена система, реализующая заявляемый способ при движении объекта вдоль траектории без препятствий, на фиг. 2 - при движении объекта вдоль траектории с препятствием.
Адаптивный способ измерения перемещений реализуется при использовании системы, приведенной на фигуре, содержащей преобразователь 1, расположенный на объекте 2, группы 3 источников сигнала 4 с уникальным кодированием за счет изменения количества источников сигнала 4, и/или изменения расстояния между любыми двумя источниками сигнала 4, и/или изменения видов используемых источников сигнала. Также могут быть использованы отдельные источники сигналов с уникальным кодированием (чипы, метки, кодоносители).
Например, на объект 2 в качестве преобразователя 1 устанавливают магнитострикционный преобразователь линейных перемещений, имеющий диапазон измерения перемещений а. Группы 3 источников сигнала 4 - магнитов с уникальным кодированием - расставляют вдоль траектории перемещения объекта 2 на любом расстоянии друг от друга, не превышающем диапазон измерения преобразователя а. Таким образом, на участке траектории длиной а всегда присутствует минимум одна группа 3 источников сигнала 4 с уникальным кодированием или два магнита с уникальным расстоянием между ними.
Рассмотрим случай, когда на каждом участке траектории длиной а используют сформированные группы 3 магнитов с уникальным кодированием, имеющие одинаковое число магнитов, но изменяемое расстояние между ними. То есть на первом участке траектории длиной а магниты группы 3 располагают на расстоянии Δ друг от друга с образованием первого уникального набора, на втором участке траектории длиной а магниты группы 3 располагают таким образом, чтобы крайний правый магнит был отодвинут на расстояние 2Δ, на третьем участке траектории длиной а магниты группы 3 располагают таким образом, чтобы крайний правый магнит был отодвинут на расстояние 3Δ и т.д. Получаем, что на любом участке траектории движения объекта длиной а напротив зоны чувствительности преобразователя располагается неповторяющаяся (уникальная) комбинация источников сигнала 4 внутри группы 3, расположенных на расстояниях между ними с неповторяющимися значениями, что позволяет однозначно идентифицировать положение объекта 2 и определить его перемещение (фиг. 1).
Также магниты группы 3 можно расположить так, чтобы расстояние между ними оставалось одинаковым, но изменялось их количество, то есть на первом участке траектории длиной а можно размесить два магнита, на втором участке длиной а - три магнита и т.д. В данном случае на любом отрезке траектории длиной а напротив зоны чувствительности преобразователя перемещений 1 будет располагаться неповторяющаяся комбинация источников сигнала 4 группы 3, что позволяет однозначно идентифицировать положение объекта 2 и определить его перемещение.
Также возможен вариант размещения магнитов группы 3, когда изменяется как количество магнитов, так и расстояние между любыми двумя магнитами, то есть на первом участке траектории длиной а располагают группу 3, например, с двумя магнитами на расстоянии Δ между ними, на втором участке траектории длиной а располагают группу 3 с тремя магнитами с расстоянием 2Δ между вторым и т.д. В данном случае на любом отрезке траектории длиной а напротив зоны чувствительности преобразователя будет располагаться неповторяющаяся комбинация источников сигнала 4 группы 3, что позволяет однозначно идентифицировать положение объекта и определить его перемещение.
Данный способ может быть использован при наличии на пути следования объекта 2 трудно устранимого препятствия 5, размер которого не превышает величины диапазона измерения преобразователя. Если до наличия препятствия группы 3 источников сигналов 4 с уникальным кодированием располагали оптимальным образом, то есть на максимальном расстоянии друг от друга, то при наличии препятствия 5 очередную группу 3 источников сигналов 4 с уникальным кодированием располагаются перед препятствием 5, а следующую за ней группу 3 источников сигналов 4 с уникальным кодированием устанавливает уже за препятствием 5, например, на максимальном расстоянии от предыдущей группы 3.
Группы 3 источников сигналов 4 с уникальным кодированием случайным образом расставляют на каждом участке траектории длиной а. При движении объекта 2 вдоль траектории с расставленными группами 3 источников сигналов 4 с уникальным кодированием преобразователь перемещений 1 выдает значение положения каждой указанной группы 3, напротив которой расположен объект 2 с установленным на нем преобразователем перемещений 1. В момент времени начала первого движения объекта в обрабатывающую аппаратуру поступает информация о координате положения объекта в точке начала движения. Данная координата принимается за начало отсчета координат. При поступательном движении объекта в сторону увеличения его координаты, в активную зону преобразователя поступают установленные группы 3 источников сигнала 4 с уникальным кодированием. При этом в момент поступления в активную зону преобразователя очередной группы 3 источников сигнала 4, в активной зоне преобразователя, согласно условиям расстановки группы 3 источников сигналов 4, всегда будет присутствовать предыдущая группа 3 источников сигнала 4. Таким образом, зная абсолютную координату предыдущей группы 3 источников сигнала 4, вычисляется абсолютная координата очередной группы 3 источников сигнала 4. Полученные значения передаются в обрабатывающую аппаратуру, которая, получая информацию о положении объекта относительно каждой конкретной группы 3, вычисляет абсолютное положение объекта вдоль траектории. Если необходимо измерять абсолютное значение положения объекта после прерывания питания аппаратуры, то получаемые значения положения каждой группы 3 источников сигнала 4 необходимо сохранять в энергонезависимой памяти обрабатывающей аппаратуры.
По выходному сигналу с преобразователя перемещений можно также определить номера групп 3 источников сигналов 4, воздействие с которых было оказано на преобразователь 1, и любые другие параметры указанных групп 3, если существует такая необходимость.
К тому же заранее сформированные группы источников сигнала с уникальным кодированием и/или отдельные источники сигнала с уникальным кодированием с нескольких участков траектории длиной а при необходимости можно поменять местами произвольным образом с обеспечением условия расположения хотя бы одного отдельного источника сигнала с уникальным кодированием и/или одной такой группы на расстоянии, не превышающем диапазон измерения преобразователя. Также на любой участок траектории длиной а при необходимости можно добавить любое количество дополнительных отдельных источников сигнала с уникальным кодированием и/или сформированных групп 3 с источниками сигнала 4 с уникальным кодированием. Адаптивность заявляемого способа измерения перемещений позволяет повысить точность измерений при исключении ее зависимости от точности установки источников сигнала. В свою очередь, отсутствие необходимости располагать отдельные источники сигнала с уникальным кодированием и/или группы 3 в определенном порядке добавляет свободу их расстановки, позволяя выполнять такую расстановку одновременно несколькими отдельными группами, что значительно уменьшает время развертывания системы измерения объекта.
Увеличение расстояния, на которое возможно переместить объект, можно вычислить следующим образом. Например, в качестве магнитострикционного преобразователя линейных перемещений используют преобразователь фирмы Balluff GmbH, величина нелинейности которого составляет 30 мкм, диапазон измерения равен 4500 мм. Если использовать данный преобразователь, группу с двумя источниками сигнала с учетом изменения расстояния между ними на 31 мкм на каждом отрезке траектории и учитывать то, что минимально необходимое расстояние между источниками сигнала должно быть не менее 60 мм, то возможно получить:

уникальных положений источников сигналов.
Таким образом, суммарный диапазон измерений при использовании групп с двумя источниками сигнала с уникальным кодированием составляет:

с повторяемостью 30 мкм.
Повторяемость - характеристика качества результатов измерения, которая отображает степень приближения одного к другому результатов повторных измерений одной и той же физической величины, проведенных в одинаковых условиях.
В итоге, адаптивный способ измерения перемещений объекта позволяет повысить точность измерения перемещений объекта при значительном увеличении расстояния перемещения и наличии трудно устранимых препятствий на пути его следования. При этом значительно упрощается процесс расстановки источников сигнала, сформированных в группы с уникальным кодированием перед началом их установки вдоль траектории движения объекта, что снижает трудоемкость при реализации способа в целом и повышает удобство его использования.
Также повышается скорость определения положения объекта и его перемещения по производственной территории, что обеспечивает повышение эффективности производственного процесса в целом. К тому же, для измерения перемещений в случаях с пассивными источниками питания необходимо обеспечить питанием только один преобразователь, установленный на объекте, что также упрощает способ измерения.
Преимуществом адаптивного способа является возможность автоматизированного построения координатной сетки, состоящей из отдельных источников сигнала с уникальным кодированием и/или групп источников сигнала с уникальным кодированием, для определения положения объекта посредством прохождения объектом всех или части указанных вариантов источников сигнала. Для этого определяют абсолютную координату любого отдельного источника сигнала с уникальным кодированием и/или группы источников сигнала с уникальным кодированием на траектории следования объекта, относительно нее вычисляют дистанции между последовательно расположенными отдельными источниками сигнала с уникальным кодированием или группами источников сигнала с уникальным кодированием, автоматически вычисляют абсолютные координаты каждого отдельного источника сигнала с уникальным кодированием и/или группы источников сигнала с уникальным кодированием в пространстве при условии, что любые два последовательно расположенных отдельных источника сигнала с уникальным кодированием и/или две последовательно расположенные группы источников сигнала с уникальным кодированием расположены в пределах диапазона измерения преобразователя. Таким образом, автоматически формируется таблица расположения отдельных источника сигнала с уникальным кодированием и/или группы источников сигнала в пространстве, на основании которой позиционируется объект.
Более того, при использовании адаптивного способа возможным становится отслеживание изменения расположения источников сигнала с уникальным кодированием и/или групп источников сигнала в пространстве без остановки позиционирования, а также увеличение траектории и дистанции позиционирования путем добавления новых источников сигнала с уникальным кодированием и/или групп источников сигнала с уникальным кодированием на траекторию движения объекта. Работа системы, реализующей указанный способ, продолжается и в случае отдельной или массовой потери отдельных источников сигнала с уникальным кодированием и/или групп источников сигнала с уникальным кодированием, если не нарушаются условия о расположении источников сигнала и/или групп источников сигнала в пространстве. Иными словами, при использовании адаптивного способа одновременно и непрерывно выполняются две функции: позиционирование объекта с определением его абсолютной координаты и отслеживание добавлений, удалений источников сигнала с уникальным кодированием и/или групп источников сигнала с уникальным кодированием, а также изменений в расположении источников сигнала с уникальным кодированием, и/или групп источников сигнала с уникальным кодированием в пространстве с автоматической корректировкой таблицы расположения источников сигнала с уникальным кодированием, и/или групп источников сигнала с уникальным кодированием, если не нарушаются необходимые условия их расположения.
Важным является и то, что для реализации способа могут быть использованы разные источники сигнала, преобразователи и соответствующая аппаратура для обработки выходного сигнала, что делает его универсальным.
Способ измерения перемещений объекта
Способ измерения перемещений объекта
Способ измерения перемещений объекта
Способ измерения перемещений объекта

