Результат интеллектуальной деятельности: Способ навигации движущихся объектов
Вид РИД
Изобретение
Изобретение относится к области навигации движущихся объектов и может быть использовано при построении различных систем локации, предназначенных для определения местоположения движущихся объектов, управления их движением и обеспечения навигации движущихся объектов.
Известен способ навигации движущихся объектов (ДО) [1]. Способ навигации [1] осуществляется следующим образом.
Используют информацию эталонной карты местности, установленной на ДО до начала движения, о навигационном поле земли.
Выбирают необходимый участок местности эталонной карты, который представляет собой мерный участок и определяется величиной допустимых отклонений местоположения ДО от заданного (квадрат неопределенности).
Составляют текущую карту путем измерения параметров мерного участка с помощью трех лучей радиоволн, расположенных в одной плоскости, которая находится перпендикулярно направлению движения ДО.
Лучи радиоволн циклически излучают следующим образом. Первым излучают луч, направление распространения которого расположено в плоскости, ортогональной плоскости горизонта мерного участка, или в плоскости, которая находится под углом к плоскости горизонта мерного участка (первый луч). Далее излучают лучи, направление распространения которых не совпадает с направлением распространения первого луча, причем направления распространения одной части лучей находятся слева (по направлению движения ДО) от первого луча, а другой части - справа (по направлению движения ДО) от первого луча.
Вычисляют параметры мерного участка (высоту до поверхности мерного участка в точках пересечения лучей с поверхностью мерного участка в точках измерений) на основе измерений дальностей с помощью лучей радиоволн от ДО до поверхности мерного участка.
Проводят вычисления, аналогичные описанным выше, по эталонной карте для каждого возможного положения ДО (для каждой гипотезы) внутри квадрата неопределенности.
Вычисляют для всех гипотез внутри квадрата неопределенности слагаемые показателя близости.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Определяют поправки к координатам местоположения ДО в плановых координатах мерного участка на основе анализа взаимных смещений эталонной и текущей карт местности мерного участка (смещение экстремума показателя близости от центра квадрата неопределенности).
Вычисляют высоту ДО над поверхностью мерного участка в координатах мерного участка (в точке определения местоположения ДО в плановых координатах мерного участка).
Выдают поправки к координатам местоположения ДО в плановых координатах мерного участка по трем координатам.
Управляют движением ДО путем коррекции их местоположения по трем координатам по мере прохождения мерного участка.
Недостатком способа [1] является отсутствие информации об углах эволюции движущегося объекта. Дело в том, что при движении положение ДО в пространстве - динамическое: постоянно возникают и действуют на условия измерений углы азимута, крена и тангажа [2]. Однако углы азимута, крена и тангажа ДО в моменты проведения измерений не учитываются, что снижает точность навигации ДО.
Известен способ навигации движущихся объектов (ДО) [3], выбранный за прототип. Способ навигации [3] осуществляется следующим образом.
Способ навигации [3] поясняют следующие чертежи:
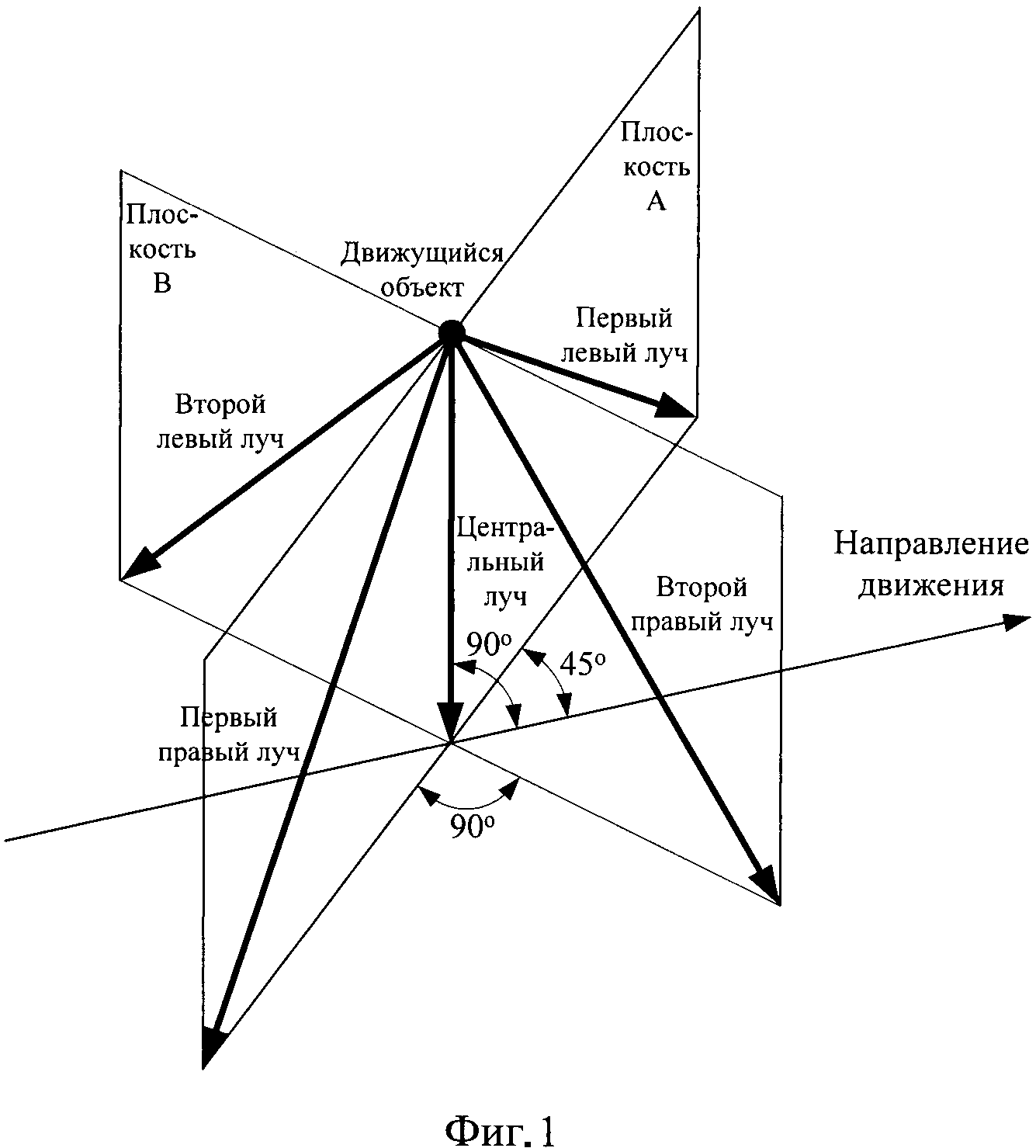
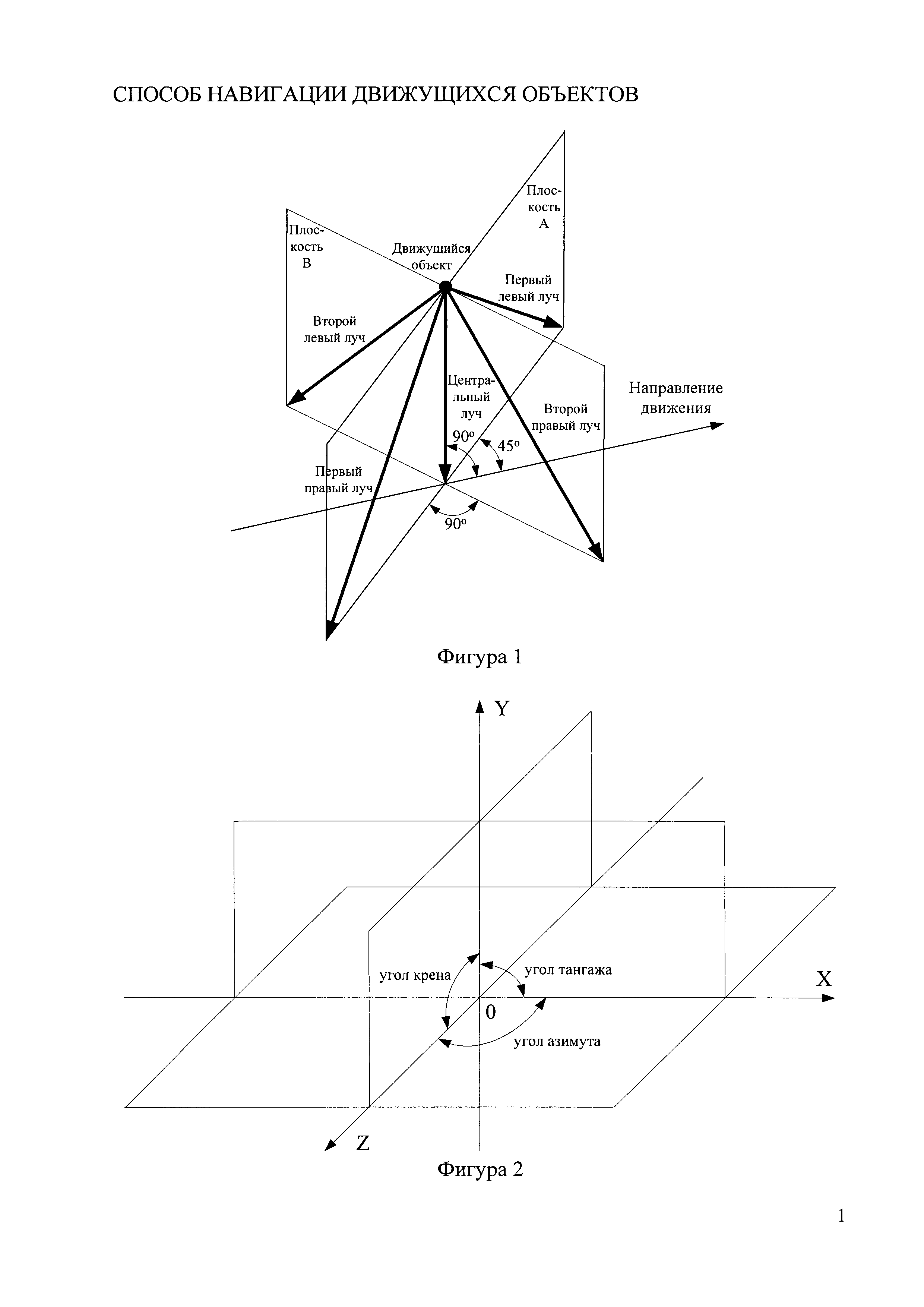
- на фигуре 1 показаны две ортогональные плоскости A и B; в плоскости A расположены лучи: центральный, первый левый и первый правый; в плоскости B расположены лучи: центральный, второй левый и второй правый; указано положение плоскостей A и B относительно направления движения;
- на фигуре 2 определены углы азимута, крена и тангажа;
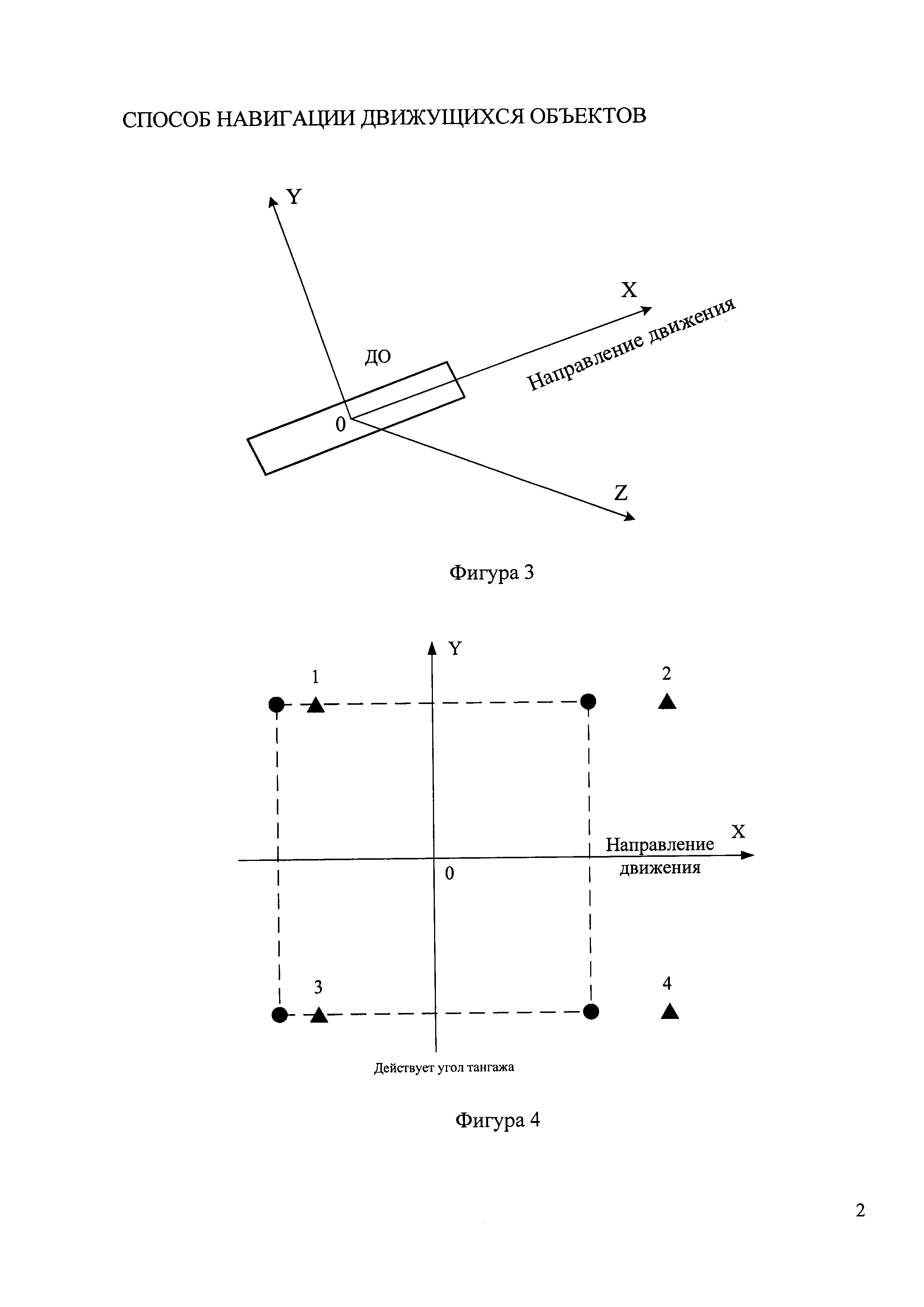
- на фигуре 3 показана связанная система координат движущегося объекта согласно ГОСТ 20058-80 [2], OX - продольная ось связанной системы координат ДО, OY - нормальная ось связанной системы координат ДО;
- на фигуре 4 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения доплеровских частот FД при наличии угла тангажа (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-4) - положения при наличии угла тангажа αТ>0 для нулевых значений углов крена и азимута αK=αA=0);
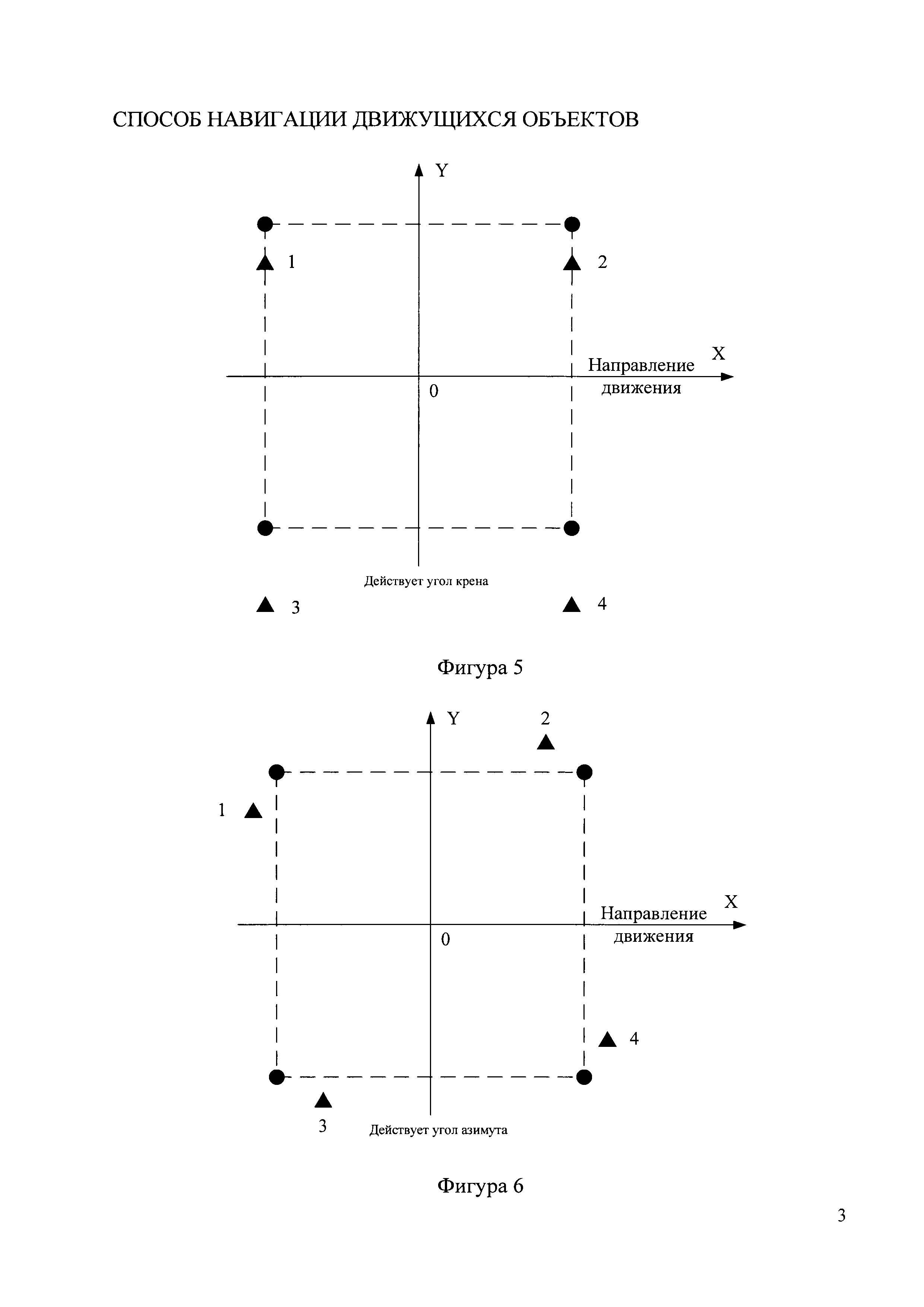
- на фигуре 5 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения доплеровских частот FД при наличии угла крена (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-4) - положения при наличии угла крена αК>0 для нулевых значений углов тангажа и азимута αТ=αA=0);
- на фигуре 6 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения доплеровских частот FД при наличии угла азимута (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-4) - положения при наличии угла азимута αA>0 для нулевых значений углов тангажа и крена αT=αK=0).
Реализацию способа навигации ДО рассмотрим на примере составления текущей карты с помощью многолучевых измерений с использованием пяти лучей радиоволн, которые расположены в плоскостях A и B (по три в каждой плоскости) (фиг. 1).
Используют информацию эталонной карты местности, установленной на ДО до начала движения, о навигационном поле земли.
Выбирают необходимый участок местности эталонной карты, который представляет собой мерный участок и определяется величиной допустимых отклонений местоположения ДО от заданного (квадрат неопределенности).
При движении над мерным участком излучают циклически лучи радиоволн. В каждом цикле лучи радиоволн излучают последовательно в следующем порядке. Центральный луч принадлежит к двум плоскостям: А и В. Вначале излучают лучи плоскости А: первым - центральный луч, расположенный перпендикулярно направлению движения ДО (фиг. 1), вторым - первый левый луч, расположенный слева впереди относительно центрального по направлению движения ДО, третьим - первый правый луч, расположенный справа сзади относительно центрального по направлению движения ДО. Затем излучают лучи плоскости B: четвертым - второй левый луч, расположенный слева сзади относительно центрального по направлению движения ДО, пятым - второй правый луч, расположенный справа спереди относительно центрального по направлению движения ДО (фиг. 1). Угол между левыми лучами и центральным лучом равен углам между правыми лучами и центральным лучом. Плоскости A и B повернуты вокруг центрального луча на угол, равный 45 градусов, относительно продольной оси движущихся объектов и ортогональны друг другу.
Измеряют циклически дальности до рельефа местности по каждому из пяти лучей (фиг. 1).
Измеряют циклически доплеровские частоты FД, возникающие при измерениях дальностей в боковых лучах: первый и второй левые лучи и первый и второй правые лучи. Доплеровские частоты для данного цикла измерений составляют массив частот, который определяется четырьмя значениями: значениями доплеровских частот отраженных сигналов по левым (первому и второму) и правым (первому и второму) лучам соответственно (фиг. 4-6).
Определяют разности измерений дальностей первого левого и центрального лучей, первого правого и центрального лучей, второго левого и центрального лучей, второго правого и центрального лучей текущего цикла измерений, а также вычисляют разности измерений центрального луча в текущем цикле и в предыдущем.
При движении ДО действуют углы эволюций: углы крена αK, тангажа αT и азимута αA (фиг. 2).
Определяют значение и знак углов азимута, крена и тангажа при каждом цикле измерения дальностей, сравнивая массив измеренных доплеровских частот с массивом эталонных доплеровских частот.
По полученным данным о дальностях, а также об углах эволюции ДО вычисляют координаты точек измерений в системе координат, связанной с ДО (фиг. 3).
Вычисляют местные координаты проекции точки траектории ДО на плоскость плановых координат в координатах мерного участка.
Вычисляют параметры мерного участка (высоту до поверхности мерного участка в точках измерений) на основе разности измерений дальностей от ДО до поверхности мерного участка и определенных значений углов эволюций азимута, крена и тангажа (текущая карта).
Вычисляют в каждом цикле измерений для всех гипотез внутри квадрата неопределенности слагаемое показателя близости текущей и эталонной карт.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Определяют поправки к координатам местоположения ДО по плановым координатам мерного участка и высоте.
Выдают поправки к координатам местоположения ДО в плановых координатах мерного участка по трем координатам с учетом углов эволюции.
Управляют движением ДО путем коррекции его местоположения по трем координатам (плановые и высота).
Недостатком способа [3] является низкая точность определения дополнительных углов отклонения по азимуту, крену и тангажу, при больших углах эволюций движущегося объекта.
Отражение от подстилающей поверхности происходит не от одной точки, а от пятна засветки. Размер пятна засветки значительно возрастает при больших углах эволюций движущегося объекта, что приводит к наличию широкого спектра доплеровских частот при измерениях дальностей.
В способе [3] значение и знак углов азимута, крена и тангажа при каждом измерении дальностей определяют путем сравнения измеренного массива значений доплеровских частот с массивом значений доплеровских частот, соответствующим нулевым значениям углов азимута, крена и тангажа для каждого из боковых лучей ортогональных плоскостей соответственно.
При измерении вместо массива значений доплеровских частот массива спектров доплеровских частот точность определения значений углов азимута, крена и тангажа в способе [3] снижается.
Техническим результатом предлагаемого изобретения является повышение точности навигации за счет определения углов эволюции движущегося объекта - азимута, крена и тангажа в каждом цикле измерений дальности во время движения ДО над мерным участком путем измерения спектров доплеровских частот, возникающих при измерении наклонной дальности по каждому лучу, и сокращения количества необходимых для измерения наклонных дальностей излучаемых лучей.
Технический результат достигается тем, что в способе навигации движущихся объектов, заключающемся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений дальностей с помощью многолучевого режима измерения при помощи радиоволн, циклически излучаемых в виде лучей, расположенных в двух ортогональных плоскостях A и B, каждая из которых повернута вокруг центрального луча на угол равный 45 градусов относительно продольной оси движущихся объектов, а центральный луч перпендикулярен продольной оси движущихся объектов, причем лучи радиоволн сгруппированы так, что к первой ортогональной плоскости A принадлежат центральный луч, левые лучи боковые, расположенные впереди центрального луча, и правые лучи боковые, расположенный сзади центрального луча, а ко второй ортогональной плоскости B принадлежат центральный луч, левые лучи боковые, расположенные сзади центрального луча, и правые лучи боковые, расположенные впереди центрального луча по направлению движения движущихся объектов, боковые лучи, принадлежащие одной плоскости, попарно симметричны относительно центрального луча, определении разности результатов многолучевых измерений, определении угловых колебаний движущихся объектов по азимуту, крену и тангажу, причем углы эволюции - азимут, крен и тангаж, определяют в динамике на основе анализа значений доплеровских частот, возникающих при измерениях дальностей по каждому лучу, для анализа значений доплеровских частот используют массив значений доплеровских частот, получаемый по измерениям доплеровских частот левых и правых боковых лучей для каждой ортогональной плоскости A и B при каждом цикле многолучевого режима измерения, а значение и знак углов азимута, крена и тангажа при каждом измерении дальностей определяют путем сравнения измеренного массива значений доплеровских частот с массивом значений доплеровских частот, соответствующим нулевым значениям углов азимута, крена и тангажа для каждого из боковых лучей ортогональных плоскостей A и B соответственно, сравнении значений плановых координат текущей и эталонной карт, вычислении местоположения движущихся объектов по трем координатам эталонной карты (плановые координаты и высота), вычислении сигнала коррекции траектории движения и управлении движением движущихся объектов путем коррекции их местоположения по трем координатам эталонной карты (плановые координаты и высота) за время движения движущихся объектов над мерным участком, при составлении текущей карты на основе измерений дальностей с помощью многолучевого режима измерения лучи радиоволн циклически излучают только в одной из ортогональных плоскостей. При каждом измерении дальностей определяют стробы дальности, в которых находится отраженный от поверхности мерного участка сигнал. Углы эволюций - азимут, крен и тангаж, определяют на основе анализа значений спектров доплеровских частот, возникающих при измерениях дальностей по каждому лучу. Для анализа значений спектров доплеровских частот определяют средние доплеровские частоты для каждого строба дальности по каждому лучу. Используют массив значений средних доплеровских частот для каждого строба дальности по каждому лучу, получаемый при измерениях доплеровских частот левых и правых боковых лучей для данной ортогональной плоскости при каждом цикле многолучевого режима измерения. Значение и знак углов азимута, крена и тангажа при каждом измерении дальностей определяют путем сравнения измеренного массива значений средних доплеровских частот с массивом значений средних доплеровских частот, соответствующим нулевым значениям углов азимута, крена и тангажа для каждого из боковых лучей.
Реализацию способа навигации ДО рассмотрим на примере составления текущей карты с помощью многолучевых измерений с использованием в каждой из плоскостей A и B трех лучей радиоволн.
Способ навигации ДО поясняют следующие чертежи:
- на фигуре 1 показаны две ортогональные плоскости A и B; в плоскости A расположены лучи: центральный, первый левый и первый правый; в плоскости B расположены лучи: центральный, второй левый и второй правый; указано положение плоскостей А и В относительно направления движения;
- на фигуре 2 определены углы азимута, крена и тангажа;
- на фигуре 3 показана связанная система координат движущегося объекта согласно ГОСТ 20058-80 [2], OX - продольная ось связанной системы координат ДО, OY - нормальная ось связанной системы координат ДО;
- на фигуре 4 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения доплеровских частот FД при наличии угла тангажа (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-4) - положения при наличии угла тангажа αТ>0 для нулевых значений углов крена и азимута αK=αA=0);
- на фигуре 5 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения доплеровских частот FД при наличии угла крена (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-4) - положения при наличии угла крена αK>0 для нулевых значений углов тангажа и азимута αT=αA=0);
- на фигуре 6 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения доплеровских частот FД при наличии угла азимута (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-4) - положения при наличии угла азимута αA>0 для нулевых значений углов тангажа и крена αT=αK=0).
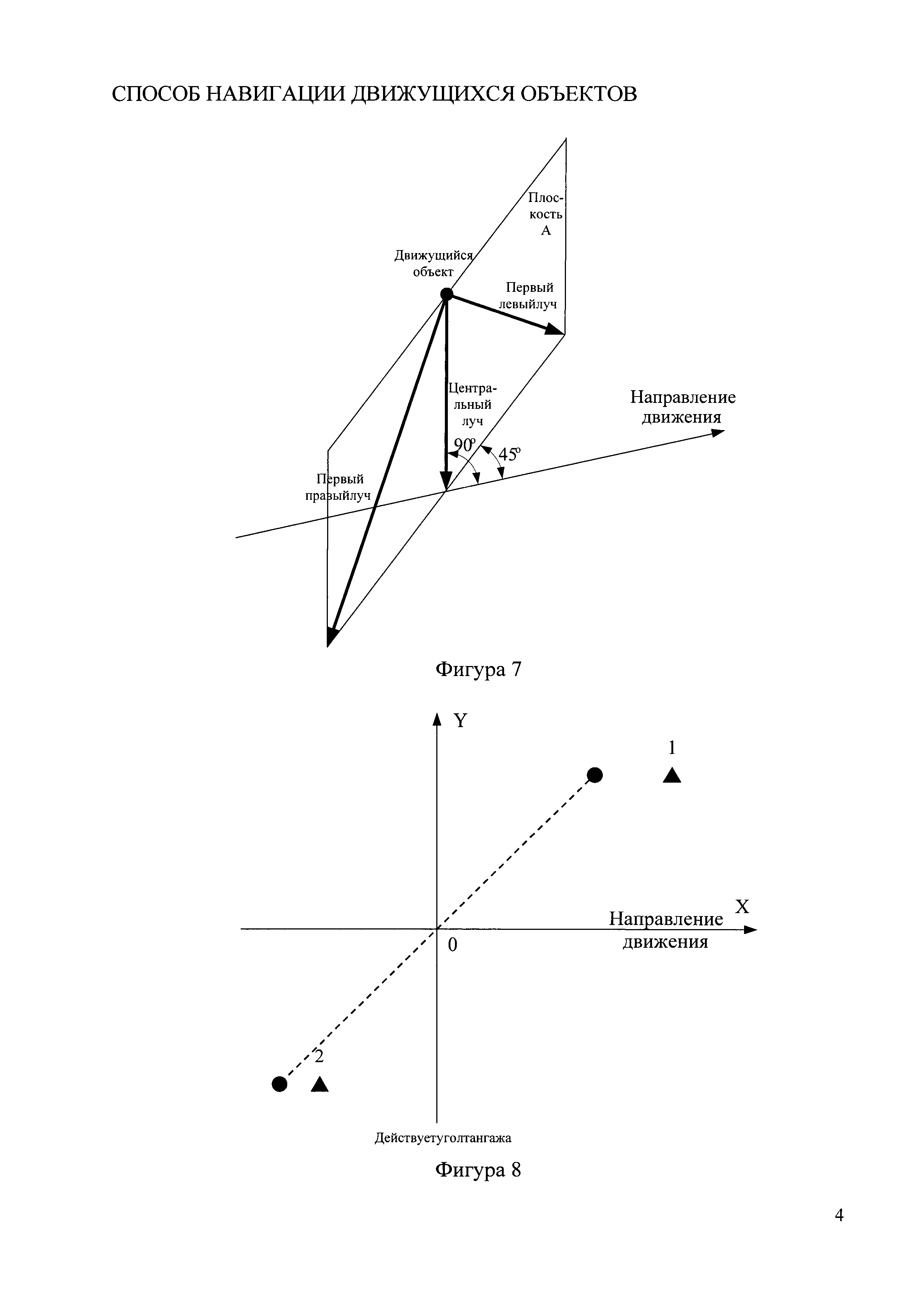
- на фигуре 7 показана плоскость A; в которой расположены лучи: центральный, первый левый и первый правый; указано положение плоскости относительно направления движения;
- на фигуре 8 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения спектра доплеровских частот  при наличии угла тангажа (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-2) - положения при наличии угла тангажа αT>0 для нулевых значений углов крена и азимута αK=αA=0);
при наличии угла тангажа (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-2) - положения при наличии угла тангажа αT>0 для нулевых значений углов крена и азимута αK=αA=0);
- на фигуре 9 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения спектра доплеровских частот  при наличии угла крена (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-2) - положения при наличии угла крена αK>0 для нулевых значений углов тангажа и азимута αT=αA=0);
при наличии угла крена (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-2) - положения при наличии угла крена αK>0 для нулевых значений углов тангажа и азимута αT=αA=0);
- на фигуре 10 показаны положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения спектра доплеровских частот  при наличии угла азимута (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-2) - положения при наличии угла азимута αA>0 для нулевых значений углов тангажа и крена αT=αK=0);
при наличии угла азимута (черные точки - положения при отсутствии углов эволюций, черные треугольники (обозначенные как 1-2) - положения при наличии угла азимута αA>0 для нулевых значений углов тангажа и крена αT=αK=0);
Способ навигации реализуется следующим образом.
Будем использовать корреляционно-экстремальный способ навигации (КЭСН), основанный на сравнении текущих карт местности с эталонными картами той же местности, в основе которого лежит определение местоположения ДО с последующим управлением движением ДО путем коррекции их местоположения. Эталонные карты устанавливают на ДО до момента начала движения над заданной поверхностью местности, а текущие карты получают во время движения ДО. По отклонениям эталонных карт местности от текущих в заданной точке траектории движения ДО определяют отклонение фактической траектории от заданной, по которому вырабатывают сигнал коррекции траектории движения и управляют движением движущихся объектов путем коррекции их местоположения.
Сравнение эталонной и текущей карт осуществляют на основе вычисления функционалов, достигающих глобального экстремума при полном совмещении изображений указанных карт. Для обработки полученной при движении ДО информации используют разностные алгоритмы, основанные на вычислении разностей измеренных наклонных дальностей текущей карты.
За время движения над мерным участком определяют текущую карту местности, для составления которой используют данные об измеренных значениях дальности с помощью лучей радиоволн, а также значения скорости и углов эволюций ДО (тангаж, крен и азимут) - априори известные данные, полученные другими средствами (инерциальная система ДО) до проведения указанных ниже измерений.
Исходными данными для вычислений в КЭСН являются:
- эталонная карта, представляющая собой массив данных о рельефе местности;
- база данных зависимости значений и знаков углов азимута, крена и тангажа от изменения массива значений средних доплеровских частот для каждого строба дальности по каждому лучу по сравнению с массивом значений средних доплеровских частот для каждого строба дальности по каждому лучу при нулевых значениях углов азимута, крена и тангажа (массив значений эталонных значений средних доплеровских частот для каждого строба дальности по каждому лучу);
- текущая карта, представляющая собой массив измеренных дальностей по всем лучам, полученных в каждом измерении для двух ортогональных плоскостей A и B.
Излучают циклически лучи радиоволн. В каждом цикле лучи радиоволн излучают последовательно в следующем порядке. Лучи в плоскости A излучают: первым - центральный луч, расположенный перпендикулярно направлению движения ДО (фиг. 7), вторым - первый левый луч, расположенный слева впереди относительно центрального по направлению движения ДО, третьим - первый правый луч, расположенный справа сзади относительно центрального по направлению движения ДО. Угол между первым левым лучом и центральным лучом равен углу между первым правым и центральным лучами. Плоскость A повернута вокруг центрального луча на угол, равный 45 градусов, относительно продольной оси движущихся объектов.
Измеряют циклически дальности до поверхности мерного участка по каждому из трех лучей (фиг. 7).
При каждом измерении дальностей определяют стробы дальности, в которых находится отраженный от поверхности мерного участка сигнал,
Измеряют циклически спектры доплеровских частот  , возникающие при измерениях дальностей в боковых лучах.
, возникающие при измерениях дальностей в боковых лучах.
Определяют средние доплеровские частоты для каждого строба дальности по каждому боковому лучу.
Средние доплеровские частоты для каждого строба дальности по каждому лучу для данного цикла измерений составляют массив средних доплеровских частот, который состоит из двух составляющих: значений средних доплеровских частот отраженных сигналов по первому левому и первому правому лучам соответственно.
Определяют разности измерений дальностей первого левого и центрального лучей, первого правого и центрального лучей, а также вычисляют разности измерений центрального луча в текущем цикле и в предыдущем.
При движении ДО действуют углы эволюций: углы крена αK, тангажа αT и азимута αA (фиг. 2).
Определяют значение и знак углов азимута, крена и тангажа при каждом цикле измерения дальностей, сравнивая массив измеренных средних доплеровских частот с массивом эталонных средних доплеровских частот.
По полученным данным о дальностях, а также об углах эволюции ДО вычисляют координаты точек измерений в системе координат, связанной с ДО (фиг. 3).
Вычисляют местные координаты проекции точки траектории ДО на плоскость плановых координат в координатах мерного участка.
Вычисляют в каждом цикле измерений для всех гипотез внутри квадрата неопределенности слагаемое показателя близости текущей и эталонной карт.
Проводят по завершении всех измерений поиск экстремума показателя близости.
Вычисляют высоту до поверхности мерного участка на основе разности измерений дальностей от ДО до поверхности мерного участка и определенных значений углов эволюций азимута, крена и тангажа.
Определяют поправки к координатам местоположения ДО по плановым координатам мерного участка и высоте.
Выдают поправки к координатам местоположения ДО в плановых координатах мерного участка по трем координатам с учетом углов эволюции.
Управляют движением ДО путем коррекции его местоположения по трем координатам (плановые и высота).
Управление движением ДО производится в темпе поступления измеренной информации, но с более высокой точностью, поскольку по мере прохождения мерного участка осуществляется коррекция местоположения ДО с учетом поправок на действующие углы эволюций.
Рассмотрим предложенный алгоритм подробнее.
В каждом цикле измерений используют три луча (фиг. 7), которые дают три значения дальности до поверхности мерного участка и два спектра доплеровских частот (центральный луч дает доплеровские частоты, близкие к нулю).
При каждом измерении дальностей определяют стробы дальности, в которых находится отраженный от поверхности мерного участка сигнал, и средние доплеровские частоты (доплеровские центроиды) для каждого строба дальности по каждому боковому лучу.
При отсутствии углов эволюций ДО, когда αT=αK=αA=0, значения средних доплеровских частот для обоих боковых лучей равны между собой и определены как  (фиг. 8-10).
(фиг. 8-10).
При наличии углов эволюций ДО значения средних доплеровских частот для каждого луча изменяются (происходит их смещение):
- при действии угла тангажа, когда αT≠0, для нулевых значений углов крена и азимута αK=αA=0 происходит смещение точек пересечения лучей с поверхностью относительно направления движения; положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения спектра доплеровских частот  , принимают значения, обозначенные черными треугольникам с номерами 1-2 на фиг. 8;
, принимают значения, обозначенные черными треугольникам с номерами 1-2 на фиг. 8;
- при действии угла крена, когда αK≠0, для нулевых значений углов тангажа и азимута αT=αA=0 происходит смещение точек пересечения лучей с поверхностью относительно направления движения; положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения спектра доплеровских частот  , принимают значения, обозначенные черными треугольникам с номерами 1-2 на фиг. 9;
, принимают значения, обозначенные черными треугольникам с номерами 1-2 на фиг. 9;
- при действии угла азимута, когда αA≠0, для нулевых значений углов крена и тангажа αK=αT=0 происходит смещение точек пересечения лучей с поверхностью относительно направления движения; положения точек на подстилающей поверхности в плановых координатах мерного участка, до которых измеряется наклонная дальность и определяются значения спектра доплеровских частот  , принимают значения, обозначенные черными треугольникам с номерами 1-2 на фиг. 10.
, принимают значения, обозначенные черными треугольникам с номерами 1-2 на фиг. 10.
По сдвигу (изменению) массива измеренных средних доплеровских частот относительно массива средних доплеровских частот, соответствующих нулевым значениям углов азимута, крена и тангажа, определяют и фиксируют значение и знак углов азимута, крена и тангажа при каждом цикле измерения дальностей. Сдвиг (изменение) массивов средних доплеровских частот определяют по двум боковым лучам в каждом цикле измерений.
Определяют в каждом цикле измерений значения и знаки углов азимута, крена и тангажа по базе данных зависимости значений и знака углов азимута, крена и тангажа от изменения (сдвига) массива значений измеренных средних доплеровских частот относительно массива значений эталонных средних доплеровских частот.
Моделирование рассмотренного способа (при скорости движении ДО, равной 330 м/с, и частоте излучения 10 ГГц), а также анализ состояния современной техники показали, что способ позволяет определять значения углов эволюций с точностью не менее 0,1°.
Важно отметить, что рассмотренный способ навигации ДО сохраняет свои положительные свойства и при большем количестве лучей радиоволн (центральный луч остается один, а количество боковых лучей слева и справа относительно центрального увеличивается и может быть по два, по три и д.т.). При этом за счет получения дополнительной информации по доплеровским частотам повышается точность определения углов эволюции. Число используемых лучей радиоволн определяется только временем, в течение которого обеспечивается измерение местоположения ДО при движении над мерным участком поверхности.
В рассмотренном способе навигации ДО по сравнению с прототипом выполнено сокращение количества необходимых для измерения наклонных дальностей излучаемых лучей и соответственно каналов для обработки полученной информации.
Таким образом, способ навигации движущихся объектов обладает рядом существенных преимуществ перед аналогом и прототипом, поскольку значительно повышается точность навигации - повышается точность определения поправок к координатам ДО по трем координатам за счет учета действия углов эволюции ДО - азимуту, крену и тангажу при движении ДО.
Управление движением ДО осуществляется в темпе поступления измеренной информации, но с более высокой точностью, поскольку по мере прохождения мерного участка коррекция местоположения ДО осуществляется с учетом возникающих углов эволюции ДО с более высокой точностью.
ЛИТЕРАТУРА
1. Патент №2338158 РФ. МПК G01C 21/00 (2006.01). Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю.В. Егоров С.Н. // Изобретения. Полезные модели. - 2008. - Опубл. 10.11.2008. - Бюл. №31.
2. ГОСТ 20058-80. Динамика летательного аппарата в атмосфере. Термины, определения и обозначения. - М.: Госкомитет по стандартам, 1980. - 54 С.
3. Патент №2471152 РФ МПК G01C 21/20 (2006.01), G01S 5/02 (2010.01). Способ навигации движущихся объектов / Хрусталев А.А., Кольцов Ю.В. // Изобретения. Полезные модели. - 2012. - Опубл. 10.08.2015. - Бюл. №22 (прототип).
Способ навигации движущихся объектов, заключающийся в использовании эталонной карты местности как априорной информации о навигационном поле, выборе участка местности (мерный участок), находящегося в пределах эталонной карты, составлении текущей карты путем вычисления плановых координат мерного участка на основе измерений дальностей с помощью многолучевого режима измерения при помощи радиоволн, циклически излучаемых в виде лучей, расположенных в двух ортогональных плоскостях А и В, каждая из которых повернута вокруг центрального луча на угол равный 45 градусов относительно продольной оси движущихся объектов, а центральный луч перпендикулярен продольной оси движущихся объектов, причем лучи радиоволн сгруппированы так, что к первой ортогональной плоскости А принадлежат центральный луч, левые лучи боковые, расположенные впереди центрального луча, и правые лучи боковые, расположенные сзади центрального луча, а ко второй ортогональной плоскости В принадлежат центральный луч, левые лучи боковые, расположенные сзади центрального луча, и правые лучи боковые, расположенные впереди центрального луча по направлению движения движущихся объектов, причем боковые лучи, принадлежащие одной плоскости, попарно симметричны относительно центрального луча, определении разности результатов многолучевых измерений, определении угловых колебаний движущихся объектов по азимуту, крену и тангажу, причем углы эволюции - азимут, крен и тангаж, определяют в динамике на основе анализа значений доплеровских частот, возникающих при измерениях дальностей по каждому лучу, для анализа значений доплеровских частот используют массив значений доплеровских частот, получаемый по измерениям доплеровских частот левых и правых боковых лучей для каждой ортогональной плоскости А и В при каждом цикле многолучевого режима измерения, а значение и знак углов азимута, крена и тангажа при каждом измерении дальностей определяют путем сравнения измеренного массива значений доплеровских частот с массивом значений доплеровских частот, соответствующим нулевым значениям углов азимута, крена и тангажа для каждого из боковых лучей ортогональных плоскостей А и В соответственно, сравнении значений плановых координат текущей и эталонной карт, вычислении местоположения движущихся объектов по трем координатам эталонной карты (плановые координаты и высота), вычислении сигнала коррекции траектории движения и управлении движением движущихся объектов путем коррекции их местоположения по трем координатам эталонной карты (плановые координаты и высота) за время движения движущихся объектов над мерным участком, отличающийся тем, что при составлении текущей карты на основе измерений дальностей с помощью многолучевого режима измерения лучи радиоволн циклически излучают в одной из ортогональных плоскостей, при каждом измерении дальностей определяют стробы дальности, в которых находится отраженный от поверхности мерного участка сигнал, углы эволюций - азимут, крен и тангаж, определяют на основе анализа значений спектров доплеровских частот, возникающих при измерениях дальностей по каждому лучу, для анализа значений спектров доплеровских частот определяют средние доплеровские частоты для каждого строба дальности по каждому лучу, используют массив значений средних доплеровских частот для каждого строба дальности по каждому лучу, получаемый при измерениях доплеровских частот левых и правых боковых лучей для данной ортогональной плоскости при каждом цикле многолучевого режима измерения, а значение и знак углов азимута, крена и тангажа при каждом измерении дальностей определяют путем сравнения измеренного массива значений средних доплеровских частот с массивом значений средних доплеровских частот, соответствующим нулевым значениям углов азимута, крена и тангажа для каждого из боковых лучей.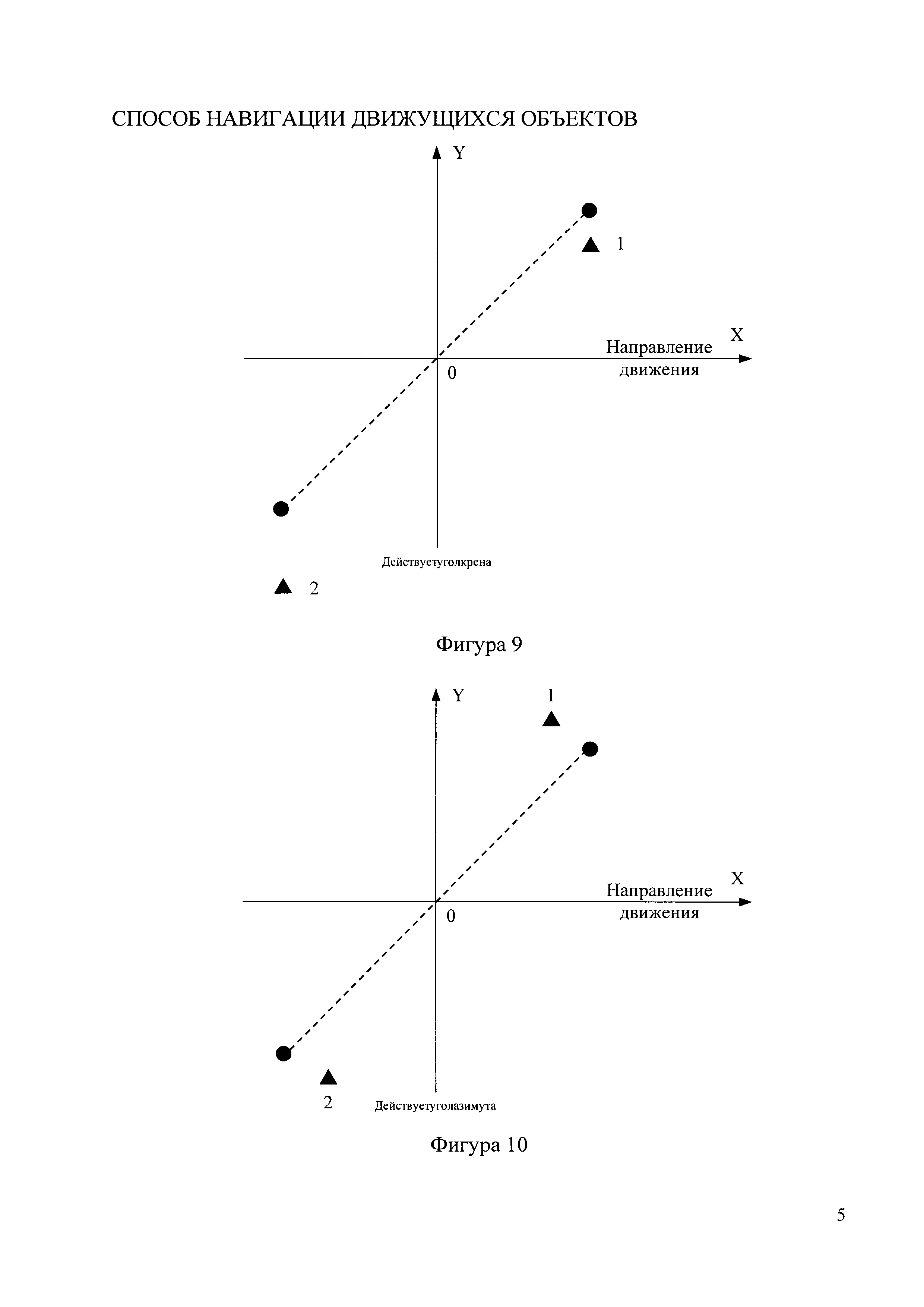
Сверхвысокочастотный генератор на основе виртуального катода с радиальным пучком
Пиридиниевый ионит для сорбции урана из растворов и пульп
Защитное устройство
Понижающий конденсаторный преобразователь напряжения
Устройство видеонаблюдения внутренней полости герметичных объектов
Генератор электромагнитных импульсов
Способ покусковой сепарации минерального сырья
Способ переработки упорных руд и концентратов
Способ получения окислов урана из тетрафторида урана
Поглотитель электромагнитных волн
Способ определения дальности до поверхности земли
Способ навигации летательных аппаратов
Способ навигации движущихся объектов
Способ определения дальности до поверхности земли

