Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ПРОЧНОГО КОРПУСА ПОДВОДНОЙ ЛОДКИ, ЗАКРЫТОГО КОНСТРУКЦИЯМИ ЛЕГКОГО КОРПУСА
Вид РИД
Изобретение
Изобретение относится к измерительной технике и может быть использовано при измерении отклонений от круговой формы корпусов крупногабаритных тел вращения, например, в сечениях шпангоутов цилиндрических корпусов или конических вставок, преимущественно подводных лодок (ПЛ), а также судов различного назначения.
Процесс ремонта или модернизации ПЛ связан со значительным объемом сварочных работ на прочном и легком корпусах. В результате этих работ могут появиться существенные деформации прочного корпуса, влияющие на его работоспособность, поэтому в соответствии с действующей нормативной технической документацией необходимо проводить контроль отклонений от круговой формы шпангоутов.
Известен координатный метод контроля формы судовых корпусных конструкций с помощью трехмерного средства измерения типа тахеометр или трекер, принятый за прототип (1).
Применение этого метода после ремонта или модернизации ПЛ, в отличие от постройки нового корабля, осложняется тем, что внутренняя поверхность прочного корпуса ремонтируемой ПЛ закрыта различным оборудованием, а внешняя - легким корпусом, что затрудняет доступ средства измерения к исходным контрольным точкам прочного корпуса и требует вскрытия технологических вырезов в легком корпусе с последующей их заделкой.
Задачей заявляемого изобретения является создание практичного и надежного способа для точного определения координат исходных контрольных точек после модернизации или ремонта ПЛ для измерения отклонений от круговой формы ее корпуса.
Технический результат, достигаемый в процессе решения поставленной задачи, заключается в повышении достоверности измерений отклонений корпуса от круговой формы и снижении трудоемкости измерительного процесса.
Указанный технический результат достигается в заявленном способе измерения формы прочного корпуса ПЛ, закрытого конструкциями легкого корпуса. Этот способ предусматривает, как и в прототипе, разметку исходных контрольных точек на наружной поверхности прочного корпуса и определение их координат с применением трехмерного средства измерения, например, тахеометра или трекера, которое устанавливают снаружи легкого корпуса. Однако в отличие от прототипа в каждой исходной контрольной точке поочередно устанавливают по нормали к прочному корпусу лазерный дальномер и определяют расстояние до противолежащей точки на внутренней поверхности легкого корпуса и маркируют ее.
Далее в эту точку устанавливают преобразователь ультразвукового дефектоскопа и с помощью известного режима теневого метода контроля наносят на наружную поверхность легкого корпуса соответствующую внешнюю контрольную точку, после чего на эту точку устанавливают отражатель и определяют трехмерным средством измерения ее координаты в корабельной системе координат.
Затем координаты полученной внешней точки преобразуют в координаты виртуальной точки, лежащей на радиусе-векторе, проходящем через исходную точку, по формулам: X2=X1+(I+h)Sinα, Y2=Y1, ZZ=Z1, где X1, Y1, Z1 - координаты внешней контрольной точки, Х2, Y2, Z2 - координаты полученной виртуальной точки, I - расстояние, измеренное с помощью дальномера, α - угол наклона прочного корпуса к центральной оси, h - толщина обшивки легкого корпуса.
После этого определяют истинные координаты каждой исходной контрольной точки прочного корпуса, перенося в направлении к нему расположение виртуальной точки вдоль радиуса-вектора на расстояние (I+h)Cosα, а затем полученные значения координат вводят в ЭВМ, которая по полученным данным определяет отклонение формы прочного корпуса ПЛ от круговой в разных сечениях.
Повышение достоверности измерений круговой формы корпуса достигается за счет получения точных значений координат внешней контрольной точки на наружной поверхности легкого корпуса, соразмерной соответствующей исходной точке.
Снижение трудоемкости процесса измерения достигается за счет отмены вскрытия в корпусе проходных отверстий для лазерного луча с последующей их заваркой.
Заявляемый способ поясняется чертежом фиг. 1, на котором показан в разрезе участок корпуса конической формы с разметкой контрольных точек и схемой их измерений, где обозначены следующие позиции: 1 - прочный корпус; 2 - центральная ось прочного корпуса; 5 - контрольная точка наружной поверхности прочного корпуса; 6 - легкий корпус; 7 - держатель «под керно» для установки лазерного дальномера по нормали к поверхности прочного корпуса; 8 - лазерный дальномер; 9 - противолежащая контрольная точка внутренней поверхности легкого корпуса; 10 - преобразователь ультразвукового дефектоскопа, установленный изнутри легкого корпуса; 11 - преобразователь ультразвукового дефектоскопа, установленный снаружи легкого корпуса; 12 - ультразвуковой дефектоскоп; 13 - противолежащая контрольная точка наружной поверхности легкого корпуса; 14 - отражатель для тахеометра (трекера); 15 - тахеометр (трекер); 16 - отражатель локальной опорной сети; 17 - радиус-вектор, проходящий через контрольные точки прочного корпуса; 18 - шпангоут; 19 - корабельная система координат; 20 - виртуальная контрольная точка, полученная проекцией точки (13) на радиус (17); I - высота межбортного пространства в направлении нормали к прочному корпусу, определяемая с помощью дальномера; h - толщина обшивки легкого корпуса; Δ - расстояние между контрольными точками: исходной и виртуальной, т.о.: Δ=(I+h)Cosα; n - расстояние между контрольными точками: вынесенной на внешнюю сторону легкого корпуса и ее проекцией (20) на радиус-вектор, проходящий через исходную контрольную точку, n=(I+h)Sinα.
Частным вариантом схемы измерений, представленной на фиг. 1 для корпуса неопределенной конической формы, является схема, данная на фиг. 2, соответствующая наиболее распространенной форме прочного корпуса ПЛ - цилиндрической, при которой угол α равен нулю. На фиг. 2 показаны контуры участков сечений прочного и легкого корпусов ПЛ с разметкой контрольных точек и схемой их измерений. При этом приняты обозначения, идентичные фиг. 1, а также приняты обозначения: 3 - след диаметральной плоскости, 4 - след основной плоскости. При использовании предлагаемого способа для измерения круговой формы цилиндрического прочного корпуса ПЛ вынесенная на внешнюю поверхность легкого корпуса контрольная точка лежит непосредственно на радиусе-векторе (17) исходной точки, как это видно на фиг. 2.
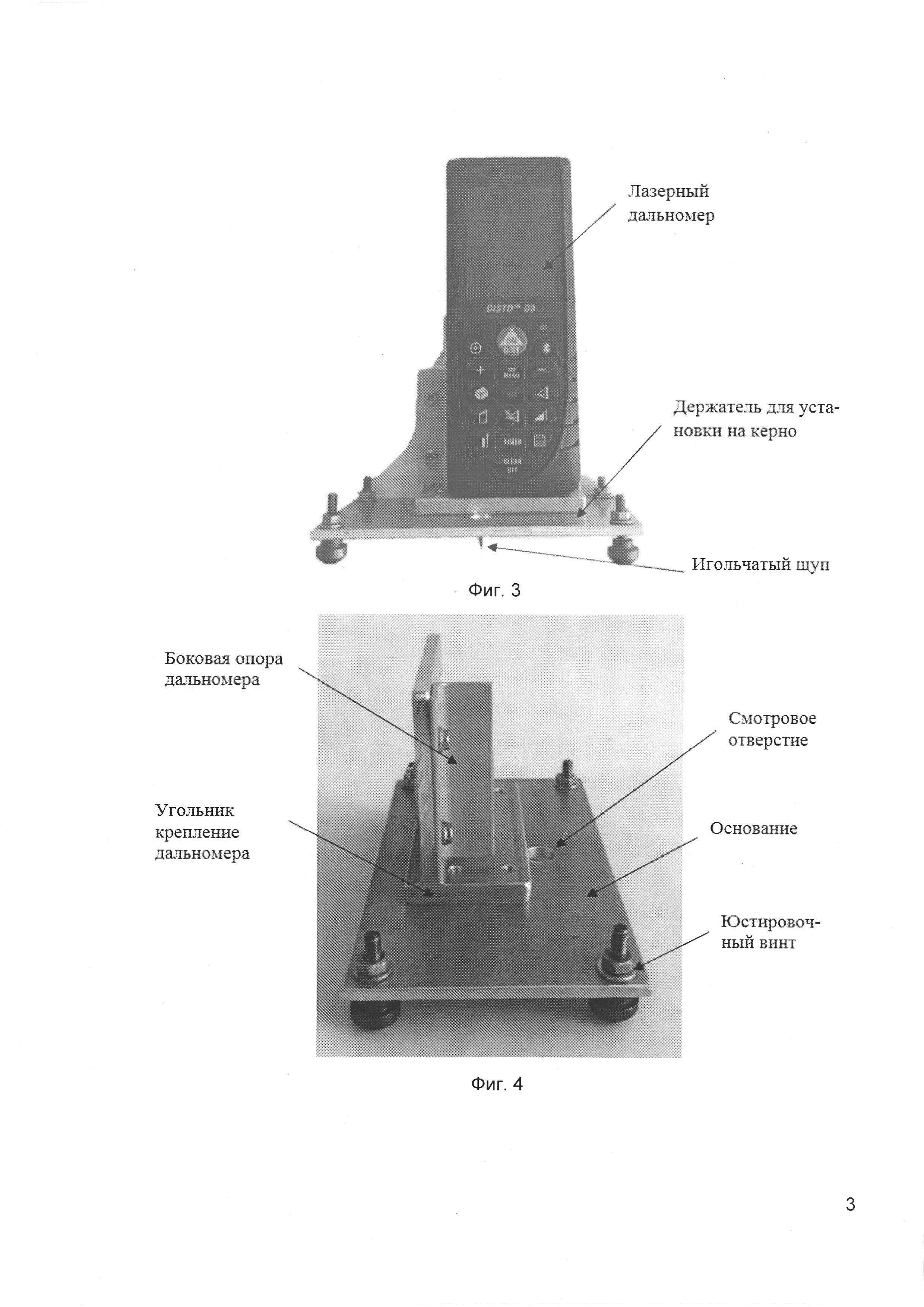
На фиг. 3, 4 и 5 изображены: общий вид дальномера, общий вид держателя, схема применения дефектоскопа.
Заявляемый способ осуществляется следующим образом на примере технологии процесса измерения отклонений от круговой формы корпуса ПЛ.
В затесненном межбортном пространстве ПЛ (см. фиг. 1, 2) обеспечивается доступ одного или двух операторов к размеченной кернением контрольной точке (5) прочного корпуса (1) для выбранного шпангоута (18). В распоряжении операторов должен находиться специальный держатель (7) с закрепленным на нем стандартным лазерным дальномером (8) (рекомендуется тип Leica Disto D8) в закрытом футляре для защиты от повреждений при переноске в затесненных условиях. Держатель (7) предназначен для обеспечения прохождения лазерного луча дальномера по нормали к поверхности прочного корпуса. Внешний вид и конструкция указанного держателя, не являющегося предметом изобретения, представлены на фигурах 3 и 4.
С помощью игольчатого щупа держателя, наблюдаемого через смотровое отверстие в его основании при подсветке фонариком, оператор должен установить держатель над кернением контрольной точки, плотно прижав четыре ножки к поверхности прочного корпуса. При этом ось симметрии держателя, проходящая между опорными ножками через след кернения измеряемой контрольной точки, визуально должна быть направлена вдоль образующей корпуса в направлении соседней контрольной точки, обозначенной на образующей с помощью кернения.
Включается лазерный дальномер, на экране которого регистрируется дистанция в мм до светового пятна, проявившегося на внутренней поверхности легкого корпуса (6). Этим световым пятном обозначается точка (9), противолежащая по нормали к исходной контрольной точке (5) на поверхности прочного корпуса. Истинное расстояние (I+h) между этими точками складывается из показаний дальномера, которые должны быть записаны оператором, и величины отстояния опорной поверхности корпуса дальномера от прочного корпуса, определяемого высотой держателя (7).
Центр светового пятна должен быть обозначен видимой точкой, проставляемой маркером. В обозначенной маркером точке поверхность легкого корпуса должна быть зачищена наждачной бумагой и протерта ветошью для последующей установки излучателя (10) ультразвукового дефектоскопа (12). Зачищенная поверхность смазывается кистью контактной жидкостью - клейстером. Оператор должен прижать излучатель к этой поверхности.
Оператор ультразвукового дефектоскопа, находящийся снаружи легкого корпуса, с помощью сканирующего приемного преобразователя (11) по максимуму сигнала на экране дефектоскопа при концентричном расположении излучателя и приемника должен обнаружить местоположение вынесенной контрольной точки (13) и обозначить его маркером или кернением. Соединительный кабель излучателя к дефектоскопу может достигать нескольких десятков метров и пропускается через штатные горловины в легком корпусе вблизи места измерений. Для локализации области сканирования может быть использована предварительная корпусная разметка или метод «простукивания». Изложенная ультразвуковая технологическая операция, не являющаяся предметом изобретения, поясняется на фигуре 5.
По описанной выше методике производится вынос на поверхность легкого корпуса всех внешних контрольных точек прочного корпуса для сечения выбранного шпангоута (18).
Измерение координат вынесенных контрольных точек производится (см. фиг. 1, 2) с помощью тахеометра или трекера (15) с использованием ряда стоянок средства измерения, объединенных в общей локальной опорной сети (16), в корабельной системе координат (19).
Координаты вынесенной внешней контрольной точки (см. фиг. 1) преобразуют в координаты виртуальной точки, лежащей на радиусе-векторе, проходящем через исходную точку, по формулам: X2=X1+(I+h)Sinα (т.к. для цилиндрического корпуса Sinα=0, то и X2=X1), Y2=Y1, Z2=Z1, где Х1, Y1, Z1 - координаты внешней контрольной точки, Х2, Y2, Z2 - координаты полученной виртуальной точки (20), I - расстояние, измеренное с помощью дальномера, α - угол наклона прочного корпуса к центральной оси, h - толщина обшивки легкого корпуса, и затем определяют истинные координаты каждой исходной контрольной точки прочного корпуса, перенося в направлении к нему расположение виртуальной точки вдоль радиус-вектора на расстояние (I+h)Cosα (для цилиндрического корпуса Cosα=1, поэтому расстояние будет равным I+h).
После определения трехмерным средством измерения координат внешней точки в корабельной системе координат преобразование ее в виртуальную точку, а также определение истинных координат для каждой исходной контрольной точки производят, например, с применением ПО трехмерного средства измерения или компьютера.
После определения истинных координат исходных точек каждого проверяемого сечения их значения вводят в ЭВМ, которая по полученным данным определяет отклонение формы прочного корпуса ПЛ от круговой в каждом сечении.
Источник информации: Корнев А.В. «Опыт использования комплекта компьютеризированных оптоэлектронных измерительных систем в судостроении», Судостроение, 2011, №5, с. 40-44.
Способ и устройство выпрямления и зачехловки деформированных по длине отработавших дефектных стержней управления и защиты
Способ центровки судового валопровода и оптический тензометр для него

