Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ БУКСИРУЕМОЙ ЛИНЕЙНОЙ АКУСТИЧЕСКОЙ АНТЕННЫ И НАВИГАЦИОННОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО
Вид РИД
Изобретение
1. ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к области сбора геофизических данных. Настоящее изобретение имеет дело с оборудованием, требуемым для изучения морского дна и свойств его осадочного слоя.
Более конкретно, изобретение относится к методике для управления буксируемой линейной акустической антенной.
В частности, изобретение может быть использовано в области промышленной нефтеразведки, используя сейсмический способ (при морской нефтеразведке), и может представлять интерес для любой другой области, которая требует системы, выполняющей получение и накопление геофизических данных в морской среде.
2. ТЕХНОЛОГИЧЕСКОЕ ОБОСНОВАНИЕ
Как подробно описано ниже, сбор сейсмических данных в области нефтеразведки связан с определенными проблемами. Изобретение, конечно, не ограничено этой конкретной областью применения, но представляет интерес для любой методики, которая должна справиться со связанными или подобными задачами и проблемами.
В операции сбора сейсмических данных на месте работ традиционно используют сети датчиков (называемые ниже "гидрофонами" при сборе данных в морской среде). Множества гидрофонов формируют каналы. Несколько каналов распределяются вдоль кабеля, чтобы сформировать линейные акустические антенны, обычно называемые "стримерами" или "сейсмическими стримерами".
Как показано на фигуре 1, сеть сейсмических стримеров 20a-20e буксируется сейсмическим судном 21. Гидрофоны обозначены позицией 16 на фигуре 2, которая иллюстрирует блок C фигуры 1 (т.е. часть стримера, который обозначен позицией 20a).
Сейсмический способ основан на анализе отраженных сейсмических волн. Таким образом, чтобы собрать геофизические данные в морской среде, возбуждается один или несколько затопленные источников сейсмических сигналов, чтобы распространить всенаправленные пакеты сейсмических волн. Волна давления, формируемая источником сейсмических сигналов, проходит через столб воды и облучает ультразвуком различные слои морского дна. Часть отраженных сейсмических волн (т.е. акустические сигналы) затем обнаруживаются гидрофонами, распределенными по длине сейсмических стримеров. Эти акустические сигналы обрабатываются и ретранслируются телеметрией от сейсмических стримеров до станции оператора, расположенной на сейсмическом судне, где выполняется обработка исходных данных.
Практически, это нацелено на выполнение анализа морского дна с минимальным числом проходов судна в области интереса. С этой целью, число стримеров, встроенных в акустическую сеть, в основном, является достаточно большим, и длина стримеров, например, может быть в пределах от 6 до 15 километров.
Управление положением стримеров осуществляется навигационным управляющим устройством, известными специалистам как "птички" (белые квадраты 10 на фигуре 1). Они установлены равномерно (например, через каждые 300 метров) вдоль сейсмических стримеров. Задачей этих птичек является распределение стримеров между собой. Иными словами, птички используются, чтобы управлять глубиной и поперечным положением стримеров. С этой целью, и как показано на фигуре 2, каждая птичка 10 включает корпус 11 оборудованный моторизованными вращающимися крыльями 12 (в более общем смысле средствами механического перемещения) позволяющими изменить положение стримеров относительно друг друга (это относится к приводу стримеров по горизонтали и по вертикали).
Чтобы выполнить локализацию сейсмических стримеров (обеспечивающую точное горизонтальное перемещение стримеров птичками), вдоль стримеров распределены акустические узлы. Эти акустические узлы представлены заштрихованными квадратами, которые обозначены позицией 14 на фигурах 1 и 2. Как показано на фигуре 1, некоторые акустические узлы 14 сети интегрированы с птичками 10 (случай на фигуре 2), а другой с ними не объединены.
Акустические узлы 14 используют под водой акустические средства связи, в дальнейшем именуемые электроакустическими преобразователями, позволяющими оценивать расстояния между акустическими узлами (ниже называемые "межузловыми расстояниями"). Более конкретно, эти преобразователи представляют собой передатчики и приемники акустических сигналов, которые могут использоваться для оценки межузлового расстояния, разделяющего два акустических узла (действуя как узел передатчика и узел приемника соответственно), расположенные на двух различных стримерах (которые могут быть смежными или не смежными), как функции времени распространения акустического сигнала, измеренного между этими двумя узлами (т.е. время пробега акустического сигнала от узла передатчика до узла приемника). В акустической сети это позволяет, таким образом, формировать ряд межузловых расстояний, позволяя узнать точное горизонтальное местонахождение всех стримеров. Здесь подразумевается, что преобразователь означает либо единственное электроакустическое устройство, состоящее из приемопередатчика (излучатель/получатель) акустических сигналов, либо комбинацию передающего устройства (например, акустического повторителя сигналов) и приемного устройства (например, датчика давления (гидрофона) или датчика движения (акселерометр, сейсмоприемник…)). Как правило, каждый акустической узел включает электроакустической преобразователь, позволяющий ему поочередно вести себя как узел передатчика и узел приемника (для передачи и приема акустических сигналов, соответственно). В альтернативном варианте воплощения, первый набор узлов действует только как узлы передатчика, и второй набор узлов действует только как узлы приемника. Третий набор узлов (каждый из которых действует поочередно как узел передатчика и узел приемника) может также использоваться в комбинации с первым и вторым наборами узлов.
Межузловое расстояние DAB между двумя узлами A и B может быть оценено на основе следующей формулы: dAB=c⋅tAB, где узел A действует как узел передатчика, который передает акустической сигнал S узлу В, действующему как узел приемника (см. пример на фигуре 1, где акустической сигнал S показан стрелкой между узлами A и B); TAB - время распространения (время пробега) между моментом излучения и моментом приема акустического сигнала, переданного от узла передатчика узлу приемника В (предполагая, что узел приемника и узел передатчика синхронизированы); и "взвешенное" или "оцененное" значение звуковой скорости (также называемое скоростью звука) акустического сигнала.
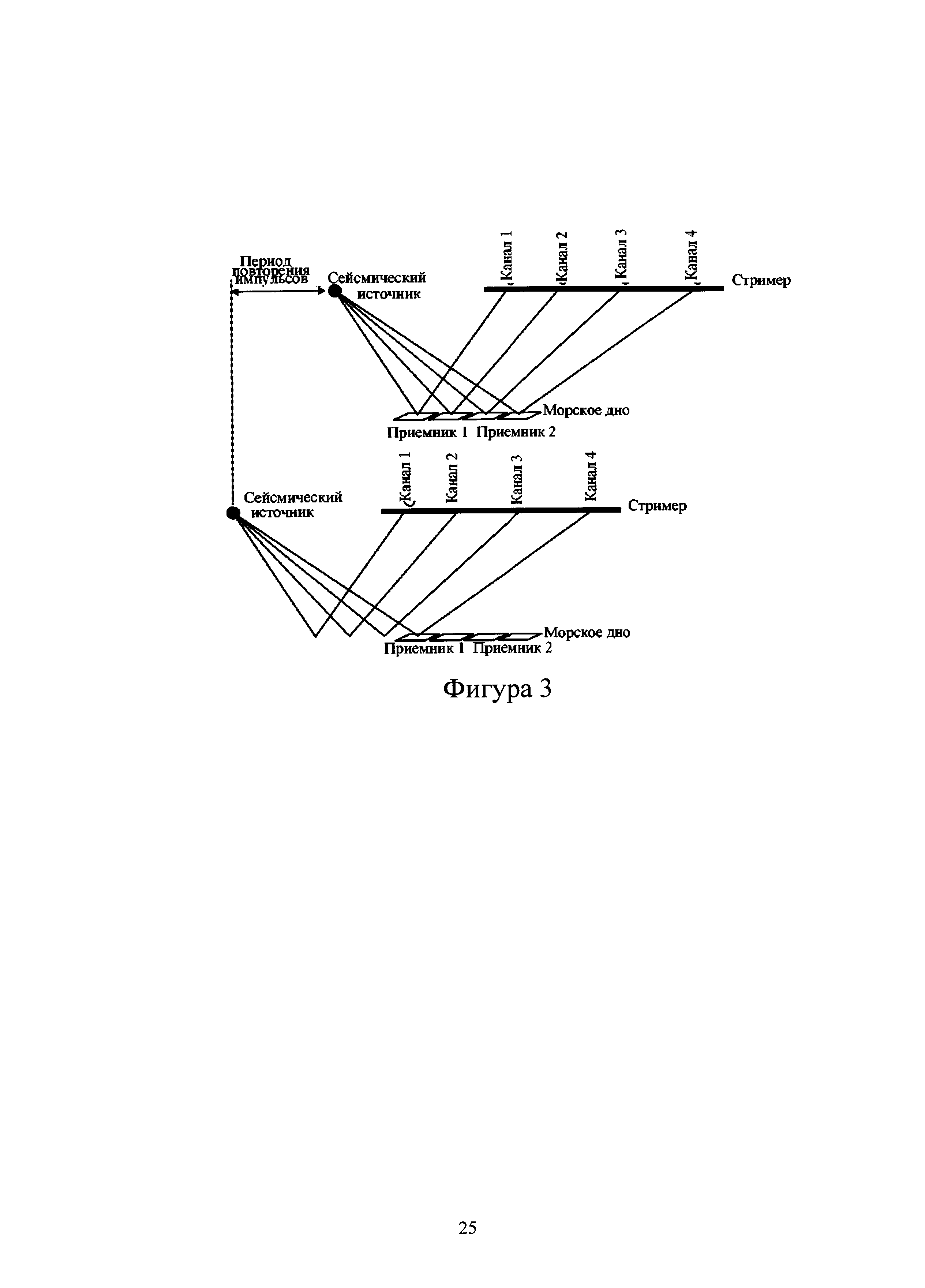
Фигура 3 иллюстрирует площадь покрытия приемников. Мы рассматриваем два последовательных ударных импульса от источника сейсмических сигналов: первый импульс показан в верхней части фигуры 3, и второй импульс показан в нижней части фигуры 3 (т.е. в этом примере источник и стример буксируются справа налево). При каждом ударном импульсе источника сейсмических сигналов стадия обработки включает выделение канала каждому приемнику. Приемники представляют собой ограниченные участки (например, 8×8 м) на поверхности земли, которые были исследованы по некоторым каналам во время сейсморазведки, т.е. которые были облучены лучами, исходящими из источника, и отраженные лучи которых были получены каналом.
Когда одному приемнику может быть выделен несколько путей, соотношение сигнал-шум может быть улучшено с помощью обработки, называемой "суммированием" сейсмических данных. Число различных лучей, направленных на один приемник, называется "покрытием". Одна из целей сейсморазведки состоит в получении однородного покрытия загружаемой сети приемников. Однако на покрытие загружаемой сети приемников могут воздействовать различные факторы, такие как угол пера α на стримерах S1-S4 (буксируемых сейсмическим судном 21 через оснастку 43), вызванный поперечным морским течением 41 (как показано на фигуре 4), V-образная форма сети стримеров, вызванная обтеканием судна водой, или в общем смысле искажением стримеров. Угол пера α является углом, который формируется стримером (например, S1) по отношению к оси 42, по который движется судно 21.
Во время сейсмической разведки покрываемые площади фактически пересекаются профилями. Если мы посмотрим на сеть приемников с покрытием каждого приемника, мы можем видеть некоторые промежутки между смежными профилями, которые появляются, главным образом, благодаря влиянию угла пера на сеть. Когда покрытия между смежными профилями сейсморазведки недостаточно, требуются дополнительные профили, называемые "уплотняющими профилями", которые увеличивают время и стоимость сейсморазведки.
В прошлое десятилетие разработчики оборудовали стримеры приборами, которые разрешают управлять стримерами в поперечном направлении. Как уже обсуждено выше, эти приборы представляют собой навигационные управляющие устройства ("птички"), которые позволяют поддерживать горизонтальное расстояние между стримерами и имеют эффект подавления V-образной формы и любого отдельного искажения стримера. Иногда эти приборы также используются, чтобы гарантировать устойчивую V-образную форму, которая также выгодна для площади покрытия.
Кроме того, некоторые современные модели включают метеорологические данные и наблюдения со спутников в дополнение к бортовому доплеровскому измерителю скорости течения (ADCP), которые позволяют прогнозировать искажение стримеров и управлять навигационными управляющими устройствами ("птичками") в зависимости от текущей информации о прогнозе. Это позволяет минимизировать "профили заполнения" и максимизировать четырехмерную (4D) повторяемость. Четырехмерная сейсморазведка - трехмерная разведка по одной и той же площади нижнего горизонта в выбранный отрезок времени.
Однако, несмотря на интеграцию навигационных управляющих устройств ("птичек", т.е. средств управления поперечным положением стримеров), все еще имеет место плохое покрытие сейсмической области и/или недостаточная повторяемость, главным образом, из-за влияния угла пера стримеров, который может измениться в процессе их работы или между двумя смежными профилями, создавая промежутки на площади покрытия.
Кроме того, в некоторых системах все управление поперечным расстоянием передано в опорный стример, также называемый "ведущим стримером". В этом случае, поскольку все соседние стримеры относятся к ведущему стримеру благодаря регулированию боковой силы, угол пера ведущего стримера имеет тенденцию создавать тот же самый угол пера для всей массы (т.е. всех смежных стримеров). Например, на фигуре 4, если S1 - ведущий стример, ведомые стримеры, S2, S3 и S4 имеют тот же самый угол пера α, что и S1.
Другой недостаток этих систем состоит в том, что, если нет глобального управления навигационным управляющим устройством (чтобы обеспечить управление ведущим стримером в поперечном направлении), форма и направление ведущего стримера меняются в зависимости от течения, инициируя угол пера стримеров в случае бокового морского течения. Если глобальное управление выполняется навигационной системой (установленной на борту сейсмического судна), это не является оптимальным решением поддержки стабильности сети в следующих ситуациях:
- разъединение или разрезание стримеров, когда каждый стример соединен с системой сбора сейсмических данных на борту судна;
- разрыв линии телеметрии между навигационным управляющим устройством ("птичкой") и бортовой системой управления;
- потеря соединения между навигационной системой и системой управления навигационными устройствами.
Следует также отметить, что между каждым профилем сейсморазведки, судно выполняет поворот приблизительно 3°/мн. Время, требуемое для стабилизации сети стримеров, очень важно и зависит, главным образом, от скорости судна, потому что сеть вообще свободна по отношению к углу перекладки пера руля судна. Искажение сети стримеров благодаря этому повороту близко к искажению сети стримеров, вызванному поперечным морским течением. Следовательно, различные недостатки известных технических решений, описанные выше для случая бокового морского течения, в основном, теми же самыми и в случае поворота.
3. ЦЕЛИ ИЗОБРЕТЕНИЯ
Изобретение, по меньшей мере, в одном варианте воплощения, нацелено на преодоление различных недостатков известной области техники.
Более конкретно, целью, по меньшей мере, одного варианта воплощения изобретения является обеспечить методику управления буксируемой линейной акустической антенной в поперечном направлении, и эта методика позволяет улучшить покрытие морского дна приемниками и четырехмерную (4D) повторяемость морской сейсмической разведки.
Другой целью, по меньшей мере, одного варианта воплощения изобретения является обеспечить методику, которая не нуждается ни в каком глобальном управлении навигационным устройством ("птичкой"), чтобы удерживать сеть стримеров в устойчивом положении даже в трех вышеописанных выше ситуациях.
Еще одной целью, по меньшей мере, одного варианта воплощения изобретения является обеспечить такую методику, которая позволяет уменьшать время, затрачиваемое при повороте, ускоряя стабилизацию сети стримеров в конце поворота.
Дополнительной целью, по меньшей мере, одного варианта воплощения изобретения является обеспечить методику такого типа, который прост в выполнении и экономически выгоден.
4. КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В конкретном варианте воплощения изобретение предлагает способ управления первой линейной акустической антенной, из множества линейных акустических антенн, буксируемых судном, при этом множество навигационных управляющих устройств расположено вдоль указанного множества линейных антенн, чтобы воздействовать, по меньшей мере, в поперечном направлении на горизонтальное положение указанных линейных антенн. По меньшей мере, одно из навигационных управляющих устройств, расположенных вдоль указанной первой линейной акустической антенны, выполняет следующие стадии:
- получение локального измерения угла пера или параметра, связанного с углом пера, при этом указанное локальное измерение, связано, по меньшей мере, с одним из навигационных управляющих устройств, расположенным вдоль указанной первой линейной акустической антенны;
- вычисление боковой силы, в зависимости от полученного локального измерения; и
- приложение вычисленной боковой силы.
Таким образом, этот конкретный вариант воплощения основан на совершенно новом и изобретательском подходе, использующем в своих интересах тот факт, что угол пера (или параметр, связанный с углом пера), используется в качестве входной информации для вычисления боковой силы и ее приложения. Это позволяет улучшать покрытие приемниками и четырехмерную повторяемость морской сейсморазведки.
Согласно одному конкретному варианту воплощения, каждое из навигационных управляющих устройств, расположенных вдоль указанной первой линейной акустической антенны, выполняет указанные стадии получения, вычисления и приложения силы.
Таким образом, управление оптимизировано.
Согласно одному конкретному варианту воплощения, указанная первая линейная антенна является ведущей линейной антенной, с которой связана, по меньшей мере, одна ведомая линейная антенна из указанного множества линейных акустических антенн.
Таким образом, изобретение обеспечивает выполнение только одного действия ведущей линейной антенны (ведущего стримера).
Согласно одному конкретному варианту воплощения, указанный параметр, связанный с углом пера, является расстоянием, разделяющим:
- опорный акустической узел, расположенный вдоль другой линейной антенны среди указанного множества линейных акустических антенн, и
- точку, которая является ортогональной проекцией на указанную другую линейную акустическую антенну, указанного, по меньшей мере, одного навигационного управляющего устройства.
Согласно одному конкретному варианту воплощения, стадия вычисления боковой силы включает стадию выполнения контура управления, который устанавливает полученное локальное измерение на заданное значение.
Таким образом, вычисление боковой силы выполняется простым способом.
В первой реализации указанное заданное значение является предопределенной величиной.
Это позволяет выдерживать оптимальный угол пера линейной антенны (стримера), даже если нет соединения с контроллером ведущего стримера (отсоединение стримера, отключение питания контроллера ведущего стримера и т.д.).
Во второй реализации стадия вычисления боковой силы включает стадию динамичного вычисления указанного заданного значения, как значения глобального угла пера или глобального параметра, связанного с глобальным углом пера, причем указанный глобальный угол пера является средним углом пера по указанной первой линейной антенне.
Для покрытия приемников или для четырехмерной повторяемости может оказаться целесообразным удалить искажение стримера вместо попытки снижения предопределенного значения угла пера стримера (например, 7°) без снижения искажения стримера.
Согласно одному конкретному варианту воплощения этой второй реализации, глобальный угол пера вычисляется как функция акустических сигналов, геодезических положений и компасного азимута.
Таким образом, глобальный угол пера вычисляется динамически. Согласно одному конкретному варианту воплощения, стадия получения локального измерения включает стадии:
- получение акустических сигналов, переданных между акустическими узлами вдоль нескольких линейных антенн, включающих, указанную первую линейную антенну и вторую линейную антенну среди указанного множества линейных акустических антенн, при этом указанные акустические сигналы предназначены для использования указанными акустическими узлами для оценки расстояния между указанными акустическими узлами;
- вычисление локального измерения как функции полученных акустических сигналов.
Таким образом, способ не требует никакого специального измерительного оборудования (усложненного использования акустических узлов для новой функции в дополнение к их обычной функции).
Согласно одному конкретному варианту воплощения, указанная вторая линейная антенна примыкает к указанной первой линейной антенне.
Таким образом, в случае, когда первая линейная антенна - ведущая линейная антенна, а вторая линейная антенна - ведомая линейная антенна, гипотеза, что углы пера этих двух линейных антенн равны, проверяется практически. Иными словами, снижается погрешность измерения (ошибка), вытекающая из углов пера двух линейных антенн (ведущего и ведомого стримеров), которые не полностью идентичны.
В конкретном выполнении стадия получения локального измерения включает стадии:
- получение предопределенного расстояния dXY, разделяющего несколько первых и вторых акустических узлов X, Y, размещенных вдоль одной из указанных нескольких линейных антенн;
- получение первого времени пробега tXD акустического сигнала между первым акустическим узлом X и третьим акустическим узлом D, расположенным вдоль других нескольких линейных антенн;
- получение второго времени пробега tYD акустического сигнала между вторым акустическим узлом Y и третьим акустическим узлом D;
- получение значения к подводной скорости звука;
- оценка, как функции tXD, tYD, k и dXY, поперечного расстояния dHD между указанной первой линейной антенной и указанный второй линейной антенной, определенной как длина по высоте, проходящей через третий узел D треугольника, имеющего в качестве вершин первый, второй и третий узлы X, Y и D, причем H является нижней точкой указанной высоты;
- оценка, как функции tXD, k и dHD расстояния dXH или d, разделяющего нижнюю точку Н и первый акустический узел X или второй акустический узел Y;
- оценка, как функции dXH и предопределенного расстояния dXB, разделяющего первый акустический узел X и четвертый акустический узел B, или как функция dYH и предопределенное расстояние dYB, разделяющего второй акустический узел Y и четвертый акустический узел B, расстояния dHB, разделяющего нижнюю точку H и четвертый акустический узел B, при этом указанное расстояние dHB используется как параметр, связанный с углом пера, причем указанный четвертый акустической узел В расположен вдоль той же самой линейной антенны, как первый и второй узлы X, Y; если полученное локальное измерение - локальное измерение угла пера, угол пера оценивается как функции dHB и dHD.
Согласно одному конкретному варианту воплощения, четвертый акустический узел аналогичен первому акустическому узлу X или второму акустическому узлу Y.
Это позволяет упростить стадию выполнения локального измерения.
Согласно одному конкретному варианту воплощения, один из указанных первого, второго, третьего и четвертого акустических узлов X, Y, D и B интегрирован, по меньшей мере, в один из указанных навигационных управляющих устройств.
Это также позволяет упростить стадия выполнения локального измерения.
Согласно одному конкретному варианту воплощения, стадия вычисления боковой силы выполняется, как функция, по меньшей мере, еще одного локального измерения, связанного с другим из указанных навигационных управляющих устройств.
Это позволяет оптимизировать стадию вычисления боковой силы (например, ускоряют работу контура управления).
В другом варианте воплощения изобретение относится к коду программы, включающем продукт компьютерной программы для выполнения вышеупомянутого способа (в любом из его различных вариантов воплощения), когда указанная программа выполняется на компьютере или процессоре.
В другом варианте воплощения изобретение относится к постоянной памяти машиночитаемого носителя, хранящего программу, которая, когда она выполняется компьютером или процессором, инициирует компьютер или процессор выполнять вышеупомянутый способ (в любом из его различных вариантов воплощения).
В еще одном варианте воплощения изобретение предлагает навигационное управляющее устройство, расположенное вдоль буксируемой линейной акустической антенны, влияющее, по меньшей мере, в поперечном направлении на положение указанной линейной антенны, отличающееся тем, что устройство содержит:
- средство для получения локального измерения угла пера или параметра, связанного с углом пера, причем указанное локальное измерение связано с указанным навигационным управляющим устройством;
- средство для вычисления боковой силы, в зависимости от полученного локального измерения; и
- средство для приложения вычисленной боковой силы.
5. СПИСОК ЧЕРТЕЖЕЙ
Другие признаки и преимущества изобретения будут поняты при чтении следующего описания в виде показательных и неисчерпывающих примеров и из приложенных чертежей, на которых:
- фигура 1 уже была описана выше в связи с областью техники, представляющей пример сети сейсмических стримеров, буксируемых сейсмическим судном;
- фигура 2 уже была описана выше в связи областью техники, с детализацией блока С, показанного на фигуре 1 (т.е. часть стримера);
- фигура 3 уже была описана выше в связи областью техники, и иллюстрирует покрытие морского дна приемниками;
- фигура 4 уже была описана выше в связи областью техники, иллюстрирующей угол пера на стримерах (буксируемых сейсмическим судном), вызванный поперечным морским течением;
- фигуры 5A и 5B иллюстрируют общий принцип способа согласно изобретению, выполняемому в навигационном управляющем устройстве (птичке), в особом случае, когда опорный акустической узел В совпадает с точкой Н (описано ниже), и локальный угол пера - нулевой угол;
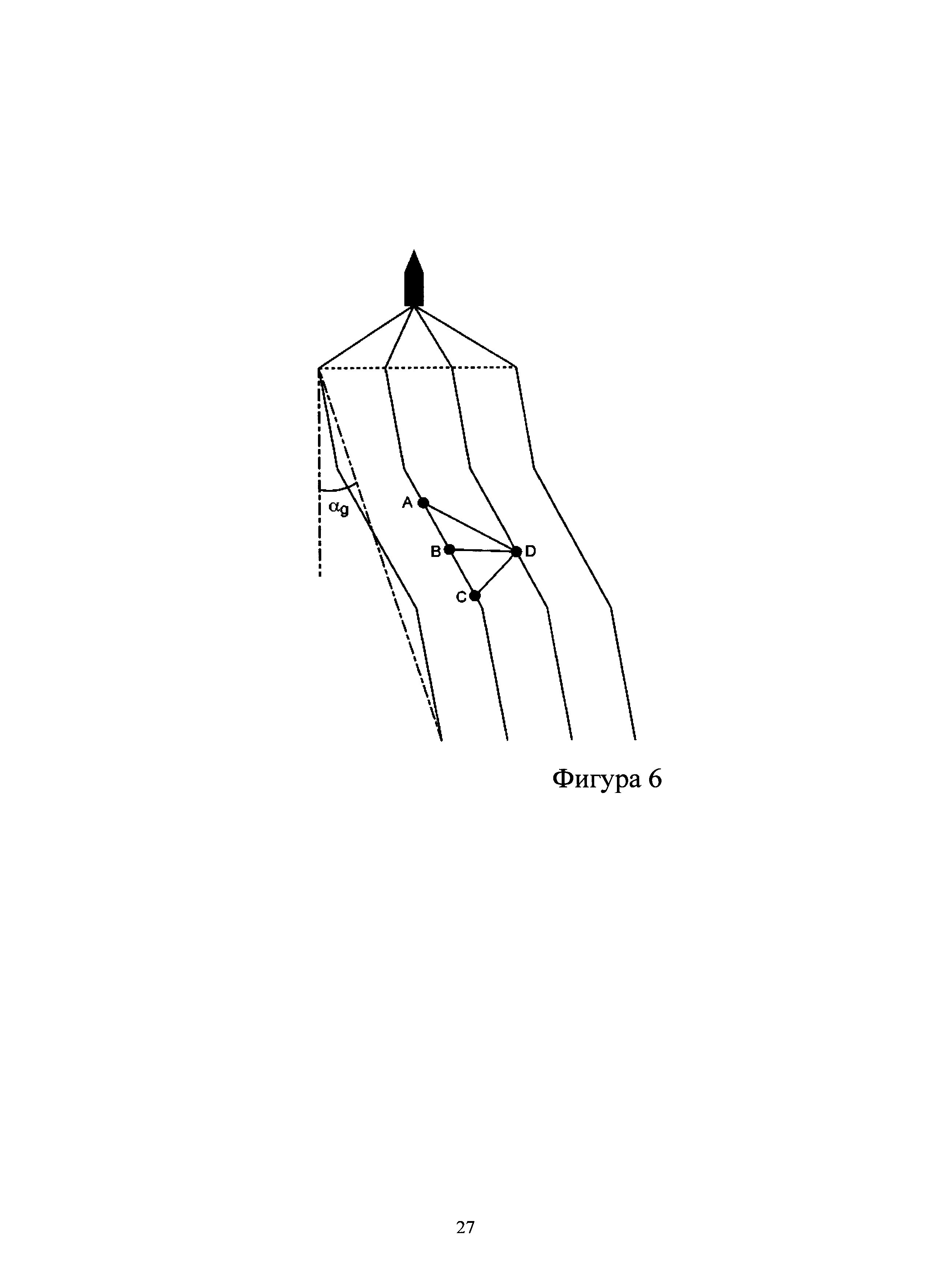
- на фигуре 6 показан глобальный угол пера αg, используемый в альтернативном варианте воплощения изобретения;
- фигура 7 - упрощенная структура навигационного управляющего устройства (птички) согласно одному конкретному варианту воплощения изобретения;
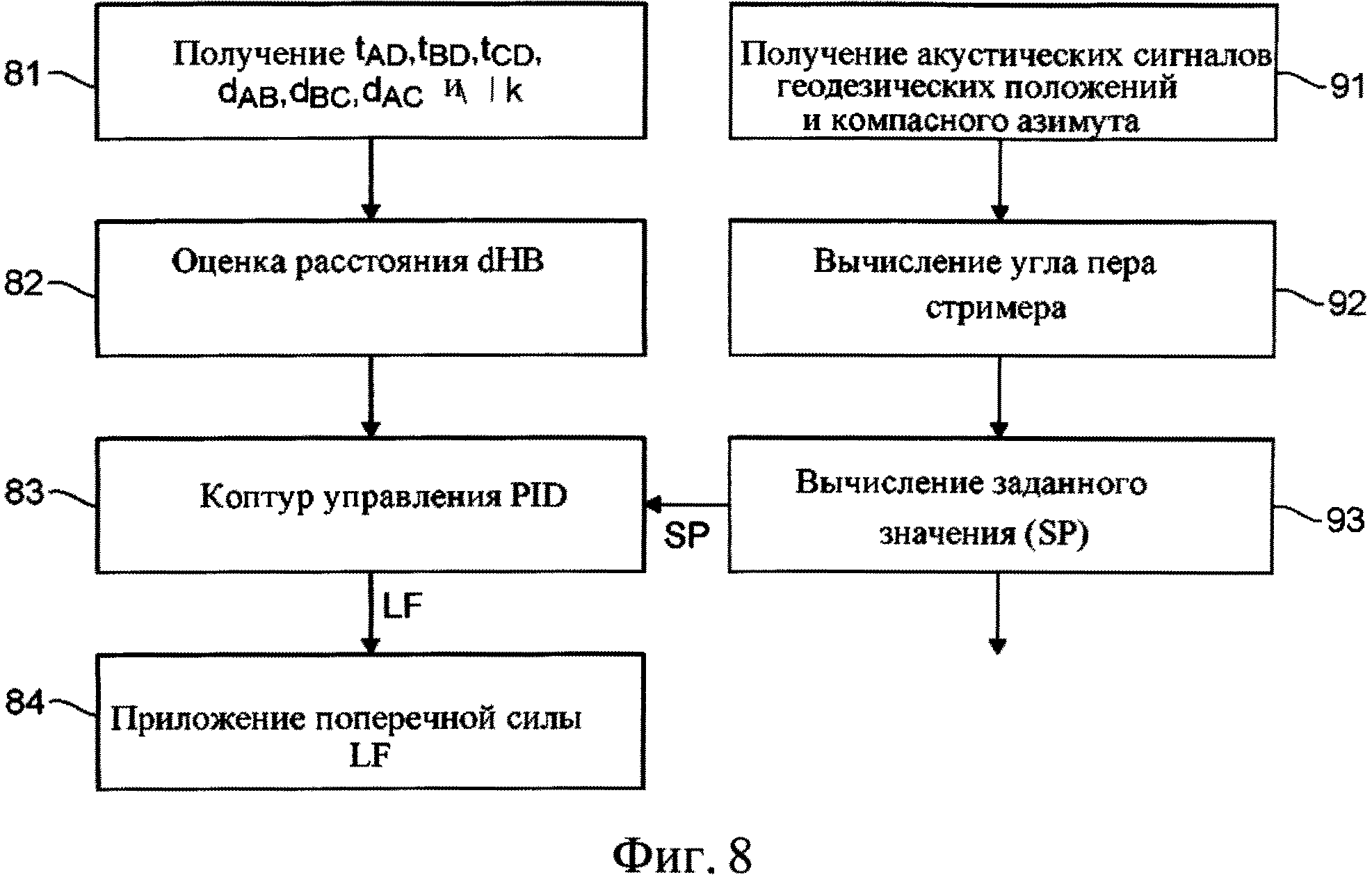
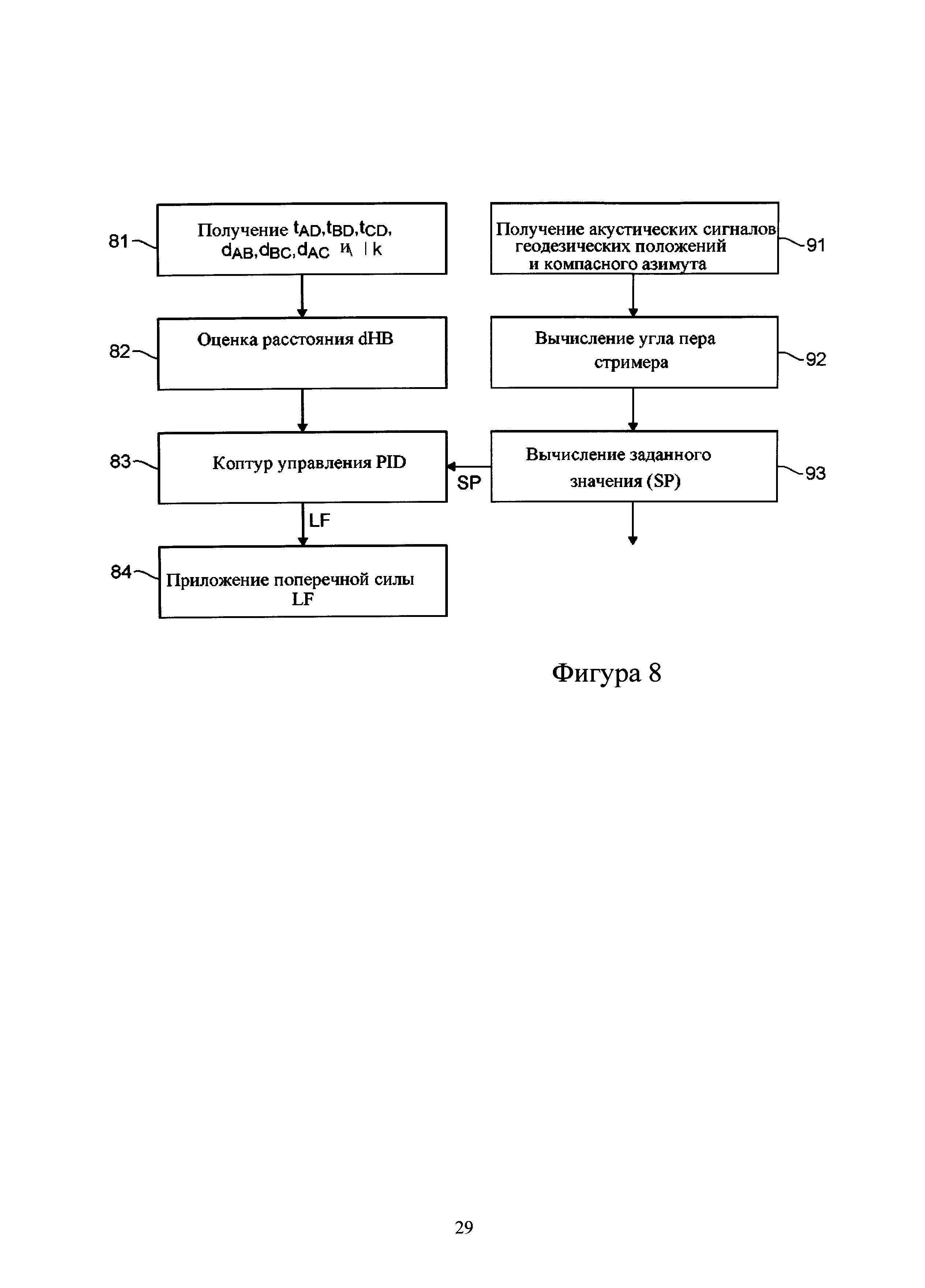
- фигура 8 - блок-схема конкретного варианта воплощения способа согласно изобретению;
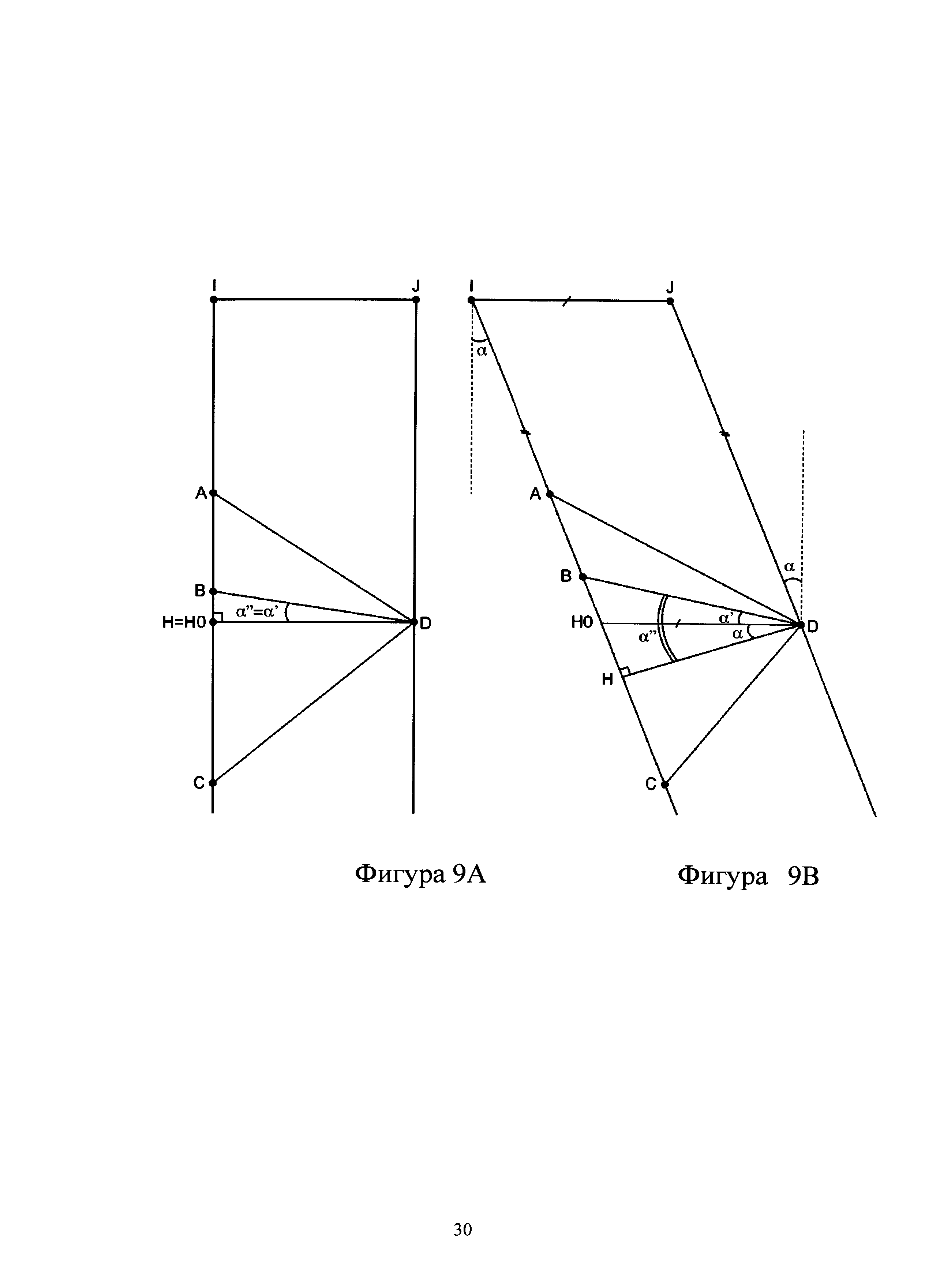
- фигуры 9A и 9B иллюстрируют альтернативный случай (по сравнению с особым случаем фигур 5A и 5B), когда опорный, акустической узел В не совпадает с точкой Н, и локальный угол пера - нулевой угол.
6. ПОДРОБНОЕ ОПИСАНИЕ
На всех фигурах настоящего документа идентичные элементы и стадии обозначены одними и теми же цифровыми позициями.
Описываемый ниже способ в случае поперечного морского течения может также быть применен при повороте судна, чтобы быстро стабилизировать сеть стримеров и, следовательно, уменьшать время выполнения поворота.
В иллюстративном варианте воплощения, показанном на фигурах 5A и 5B, мы рассматриваем сеть стримеров, включающую ведущий стример 51 и ведомый стример 52, буксируемые судном (не показано) через переднюю оснастку 53.
Отметим, что изобретение может быть осуществлено с сетью стримеров, включающей большее число ведомых стримеров, и/или больше чем с одним ведущим стримером (в этом случае, способ согласно изобретению выполняется для каждого ведущего стримера). В более общем смысле изобретение может быть применено для управления любым стримером в поперечном направлении.
Как отмечено выше в связи с фигурами 1 и 2, навигационные управляющие устройства ("птички") и акустические узлы размещены вдоль каждого стримера 51, 52. Некоторые акустические узлы встроены в птички (случай фигуры 2), а другие являются автономными.
В примере, показанном на фигурах 5А и 5 В, мы рассматриваем три акустических узла A, B и C, расположенных вдоль ведомого стримера 52, и одну птичек D, в которую встроен акустической узел (далее называемый акустическим узлом D), расположенный вдоль ведущего стримера 51.
Обсудим теперь способ согласно одному конкретному варианту воплощения изобретения, реализуемого в птичке D. Практически, этот способ может быть выполнен на всех (или почти на всех) птичках, размещенных вдоль ведущего стримера 51 (или вдоль каждого из ведущих стримеров, когда их несколько).
Как уже определено выше, угол пера α стримера определяется как угол, который сформирован этим стримером по отношению к оси, вдоль которой перемещается судно. Полагая, что ведомый стример 52 и ведущий стример 51 расположены параллельно, угол пера α является одним и тем же для каждого стримера.
На фигуре 5A предполагается, что стримеры 51, 52 параллельны оси 54, вдоль которой перемещается судно, а угол пера α равен нолю. На фигуре 5B, предполагается, что стримеры 51, 52 не расположены параллельно оси 54, вдоль которой перемещается судно, и угол пера α отличается от нуля.
Условие, что акустической узел D должен быть в любом треугольнике (XDY), имеющем в виде вершин два акустических узла X и Y (например, любую из следующих пар: A и C, A и B, B и C), выполняется, если указанные два акустических узла X и Y должны быть размещены вдоль ведомого стримера 52, и акустический узел D должен быть размещен вдоль ведущего стримера 51.
Вычисление поперечного расстояния dHD
Поперечное расстояние dHD между ведомыми и ведущими линейными антеннами 51, 52 определяется как длина вышеуказанной высоты (имеющей нижнюю точку Н и проходящую через акустической узел D в треугольнике (XDY).
Объясним теперь, как поперечное расстояние dHD может быть вычислено, если длина сторон треугольника (XDY) известна. Предположим, что длины сторон являются следующими: dXY=с, dYD=a, dAD=b и h длина высоты HD. По формуле Герона площадь этого треугольника:

где  - половина периметра треугольника.
- половина периметра треугольника.
Однако площадь треугольника также может быть описана известной формулой:
где h (также обозначенное как dHD) является высотой, имеющей нижнюю точку H и проходящую через вершину D, и c - длина основания, XY треугольника XDY.
Из этих двух приведенных выше формул для вычисления площади треугольника XDY мы получим уравнение:
которое, после упрощения, приводит к следующей формуле (I):

В примере фигур 5A и 5B поперечное расстояние dHD может быть вычислено в каждом из следующих случаев, когда треугольники (ADB), (ADC) и (BDC) имеют одну и ту же высоту HD:
- если длина сторон треугольника (ADB) известна,
- если длина сторон треугольника (ADC) известна,
- если длина сторон треугольника (BDC) известна.
Если вычисляется несколько величин поперечного расстояния dHD (каждое в разном треугольнике), то конечная величина поперечного расстояния dHD будет равна среднему из этих величин (или любой другой комбинацией этих величин).
Вычисление расстояния dHB
Рассмотрим расстояние dHB, разделяющее нижнюю точку H (которая также может быть определена как ортогональная проекция узла D на ведомый стример 52), и опорный акустической узел В (расположенный вдоль ведомого стримера 52).
В конкретном варианте воплощения, показанном на фигурах 5A и 5B, опорный акустической узел B совпадает с нижней точкой H, когда локальный угол пера - нулевой угол (α=0). Иными словами, расстояние dHB равно нулю, когда α равен нулю, т.е. в случае фигуры 5A (поскольку B=Н), и отличается от нуля, когда α отличается от нуля, т.е. в случае фигуры 5B. В этом конкретном варианте воплощения расстояние dHB является линейным смещением.
В альтернативных вариантах воплощения (например, показанных на фигурах 9A и 9B, на которых угол пера α равен нулю и, соответственно, отличается от нуля), опорный акустической узел B не совпадает с нижней точкой H, когда локальный угол пера - нулевой угол (α=0, см. фигуру 9А). Следовательно, когда α=0 (как показано на фигуре 9A), расстояние dHB не равно нулю, но H0B с H0 является ортогональной проекция узла D, когда α=0. В этих альтернативных вариантах воплощения расстояние dHB не является линейным смещением, линейное смещение представляет собой расстояние HH0.
Объясним теперь, как расстояние dHB может быть вычислено с помощью теоремы Пифагора, если поперечное расстояние dHD и некоторые межузловые расстояния известны или вычислены (используя акустические сигналы, исходящие от смежного стримера, и полагая, что подводная акустическая скорость звука известна).
В первом примере мы рассматриваем треугольник (ADB) для вычисления поперечного расстояния dHD, по вышеупомянутой формуле (I), когда DAB=c, dBD=a, dAD=b. Расстояние DAB (между акустическими узлами A и B) известно.
Расстояния dBD (между акустическими узлами В и D) и dad (между акустическими узлами А и D) вычисляется по формуле: dBD=tBDk dAD=tADk
где tBD - время распространения акустического сигнала между узлами В и D, и tAD - время распространения акустического сигнала между акустическими узлами А и D. tBD и tAD измеряется акустическим узлом D, к является подводной акустической скоростью звука (которая измеряется или оценивается).
Далее мы имеем: 
И, в конечном счете: dHB=dAB-dAH
По правилу, dHB>0, если H между A и B, и dHB<0 в противном случае. В этом первом примере Н не находится между A и B.
Во втором примере мы рассматриваем треугольник (BDC), чтобы вычислить поперечное расстояние dHD по вышеприведенной формуле (I), при dCB=c, dDB=a, dCD=b. Расстояние dCB (между акустическими узлами C и B) известно. Расстояния dBD (между акустическими узлами B и D) и dCD (между акустическими узлами С и D) вычисляется по следующей формуле: dBD=tBD и dBD=tBD=k, акустическое время распространения акустического сигнала между акустическими узлами B и D и tCD и время распространения акустического сигнала между акустическими узлами C и D tBD и tCD измеряется акустическим узлом D. к является подводной акустической скоростью звука (которое измеряется или оценивается).
Далее мы имеем: 
и, в конечном счете: dHB=dCB-dCH
По правилу, dHB>0, если Н находится между B и C, и dHB<0 в противном случае. В этом втором примере Н находится между B и C.
В третьем примере мы рассматриваем треугольник (ADC) для вычисления поперечного расстояния dHD, по вышеупомянутой формуле (I), при dAC=c, dAC=b, dCD=a. dAC. Расстояния (между акустическими узлами A и C) известны, расстояния dAD (между акустическими узлами A и D) и dCD (между акустическими узлами C и D) вычисляются по следующей формуле: dAD=tAD k, и dCD=tCD k, где tAD - время распространения акустического сигнала между акустическими узлами A и D, и tCD время распространения акустического сигнала между акустическими узлами C и D. tAD и tCD измеряются акустическим узлом D. k - подводная акустическая скорость звука (которая измеряется или оценивается).
Далее мы имеем:
И, в конечном счете: dHB=dCB-dCH, где dCB (расстояние между акустическими узлами C и B) известно.
По правилу, dHB>0, если H между B и C, и dHB<0 в противном случае. В этом третьем примере Н находится между B и C.
Вычисление угла пера α
Расстояние dHB является параметром, связанным с углом пера α, формируемым передней оснасткой 53 стримера, которая поддерживает одинаковое смещение стримеров относительно судна.
В конкретном варианте воплощения фигур 5A и 5B, зная расстояние dHD (которое также является поперечным расстоянием в этом конкретном варианте воплощения) и поперечное расстояние dHD, угол пера α может быть вычислен, используя следующую формулу (II):

Вычисление боковой силы
Птичка D вычисляет боковую силу, которая будет приложена (моторизованными вращающимися крыльями 12), как функцию вычисленного расстояния dHB (локальное измерение параметра, связанного с углом пера α).
В конкретном варианте воплощения боковая сила вычисляется с локальным контуром управления с "пропорционально-интегральной-производной" (PID), который определяет вычисленное расстояние dHB (также называемое "вычисленным поперечным расстоянием" в конкретном варианте воплощения фигур 5A и 5B) на заданном значении.
Как подробно описано ниже, со ссылкой на фигуру 8, заданное значение является либо предопределенной величиной, либо динамически вычисленной величиной.
В альтернативном варианте воплощения птичка D вычисляет боковую силу как функцию вычисленного угла пера α (локальное измерение угла пера α), например, с локальным контуром управления PID, который определяет вычисленный угол пера α по заданному значению угла.
В альтернативном варианте воплощения вычисление расстояния DHB (или угла пера α) выполняется другим устройством D’, например, акустическим узлом, который находится близко к птичке D (D должна быть заменена D’ во всех деталях вычисления и формулах). Затем птичка D получает измерение (т.е. вычисленное расстояние dHB или вычисленный угол пера α), и вычисляет боковую силу как функцию этого полученного измерения и заданного значения.
В альтернативном варианте воплощения вычисление боковой силы также выполняется вышеуказанным другим устройством. В этом случае птичка D получает только вычисленную боковую силу (т.е. сигнал, указывающий птичке D, какая боковая сила должна быть приложена).
Левая часть фигуры 8 - блок-схема конкретного варианта воплощения способа согласно изобретению, выполняемого птичкой D (см. фигуры 5A и 5B).
На стадии 81 птичка D получает времена пробега акустических сигналов (например, tAD, tBD и tCD), известные межузловые расстояния (например, dAB, dBC и dAC) и подводную скорость звука (k, которая измеряется или оценивается).
На стадии 82 птичка D вычисляет расстояние dHB (локальное измерение параметра, связанного с углом пера α).
На стадии 83 птичка D вычисляет боковую силу LF, которая будет приложена, как функция вычисленного расстояния dHB, например, локальным контуром управления, который накладывает вычисленное расстояние dHB на заданное значение SP.
На стадии 84, птичка D прилагает (с помощью моторизованных вращающихся крыльев 12) вычисленную боковую силу LF.
Первая реализация
В первой реализации заданное значение SP - предопределенная величина (например, соответствующая углу пера α, равному 0°, 5° или 10°). Эта предопределенная величина может быть сохранена в памяти птички D. Эта величина также может быть послана птичке D контроллером ведущего стримера (например, встроенным в навигационную систему или в любую другую систему управления на борту сейсмического судна).
Чтобы локально вычислить прилагаемую боковую силу, птичка D учитывает только локально измеренное расстояние dHB и предустановленное заданное значение.
Это позволяет удерживать оптимальный угол пера α ведущего стримера 51, даже если недоступно ни одно соединение с ведущим стримером (отсоединен стример, отключен контроллер ведущего стримера и т.д.).
Поскольку ведомые стримеры (52 на фигурах 5A и 5B) отделены от ведущего стримера, угол пера α уменьшается на всей сети стримеров, даже если недоступно ни одно соединение между ведущим стримером 51 и контроллером ведущего стримера.
Вторая реализация
Практически, угол пера α стримера, вызванный поперечным морским течением, может быть намного выше, чем 10°, тогда как птички обычно могут исправить угол пера не выше 3°.
Кроме того, расстояние dHB (т.е. линейное смещение в конкретном варианте воплощения фигур 5A и 5B), измеренное каждой птичкой вдоль стримера, может быть различным из-за искажения стримера.
В каждом действии уменьшение угла стримера и снижение искажений влияют на боковую силу, которая может быть выражена как поперечная динамичная сила. Как следствие, если в ведущем стримере вся динамика используется для уменьшения угла стримера, стример может быть деформирован.
Кроме того, в этом случае также может использоваться динамика боковой силы ведомого стримера, поскольку ведомый стример пытается удерживать фиксированное разделение стримеров (поперечное расстояние) по отношению к присоединенному ведущему стримеру. Это может закончиться потерей разделения стримеров, что может быть более полезным, чем наличие угла пера.
Наконец, это может быть выгодно для покрытия приемников или для четырехмерной повторяемости, чтобы удалить искажение стримера вместо того, чтобы пытаться достичь угол пера 7°, не уменьшая искажений стримера.
Итак, во второй реализации способ согласно изобретению используется для удержания одного и того же глобального угла αg вдоль стримера, снижая искажение стримера и удерживая свободную динамику боковой силы на птичках ведомых стримеров.
Как показано на фигуре 6, глобальный угол пера αg (также называемый "углом пера стримера") является средним углом пера стримера (отличающийся от угла пера, измеренного птичкой, и упомянутый выше как "локальное измерение угла пера"). Он может быть вычислен в режиме реального времени навигационной системой (стадия 92, правая часть фигуры 8), например, с алгоритмом наименьшего квадрата, который использует в качестве входов акустические сигналы, геодезические положения и компасный азимут (эти входы получены на стадии 91, правая часть фигуры 8).
Угол пера αg стримера может использоваться для определения заданного значение SP для всех птичек вдоль ведущего стримера 51 (стадия 93, правая часть фигуры 8). Затем искажение вдоль стримеров может быть уменьшено, не изменяя угла пера стримера.
В этом случае, и в конкретном контексте фигур 5A и 5B, определяется заданное значение SP:
SP=CROSSLINE_DISTANCE_SETPOINT.tan(αg)
где CROSSLINE_DISTANCE_ЗАДАННОЕ ЗНАЧЕНИЕ - разделение стримера (поперечное расстояние) заданного значения, и αg - эффективный угол пера стримера.
Обратимся теперь к фигуре 7, на которой представлена упрощенная структура навигационного управляющего устройства 70 (птички D в вышеприведенном обсуждении) согласно одному конкретному варианту воплощения изобретения.
Навигационное управляющее устройство 70 содержит постоянную память (ROM) 73, память произвольного доступа (RAM) 71 и процессор 72. Постоянная память 73 (нестираемая среда машиночитаемого носителя) сохраняет выполнимые коды команд программы, которая выполняются процессором 72 для реализации методики изобретения (например, стадии 81-84 из фигуры 8).
При инициализации указанные коды команд программы передаются из постоянной памяти 73 в память произвольного доступа 71 для их выполнения процессором 72. Аналогичным образом, память произвольного доступа 71 содержит регистры для сохранения переменных и параметров, требуемых для этого выполнения. Процессор 72 получает следующую информацию:
- время распространения звука (e.g. tAD, tBD and tCD);
- известные межузловые расстояния (e.g. dAB, dBC and dAC);
- измеренные величины подводной скорости звука (k). В альтернативе варианте воплощения эта величина оценивается процессором 72 (см. патентную заявку)
- EP 11305835.8);
- Заданное значение SP.
Согласно кодам команд программы, процессор 72 выдает вычисленную боковую силу LF (см. стадии 82 и 83 на фигуре 8), для приложения к моторизованным вращающимся крыльям 12.
Все стадии вышеописанного способа оценки могут быть выполнены одинаково хорошо:
- путем выполнения ряда кодов команд программы, выполняемой перепрограммируемым компьютером, таким как персональный компьютер (ПК), процессор цифровой обработки сигналов (DSP) или микроконтроллер. Эти коды команды программе могут быть сохранены в постоянной памяти машиночитаемого носителя, которая может быть съемной (например, дискета, CD-ROM или DVD-ROM) или встроенной; или
- специализированным механизмом или компонентом, таким как логическая микросхема, программируемая в условиях эксплуатации (FPGA), специализированная интегральная схема (ASIC) или любым специализированным аппаратным средством.
Система сбора сейсмических данных
Способ и устройство устранения залипания электродов в инерциальных микроэлектромеханических системах
Сейсмический датчик и устройство сбора данных
Модуль для обработки геофизических данных, соединитель и подсборка
Способ оценки скорости звука в воде в сети акустических узлов
Система и способ для генерирования сейсмических волн
Способ и устройство для измерения расстояния от узла до поверхности в сети акустических узлов
Подводное плавающее устройство
Способ и устройство для управления акустическими характеристиками сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн
Способ и устройство для оценки межузлового расстояния между узлом передатчика и узлом приемника
Система сбора сейсмических данных
Способ и устройство устранения залипания электродов в инерциальных микроэлектромеханических системах
Сейсмический датчик и устройство сбора данных
Модуль для обработки геофизических данных, соединитель и подсборка
Способ оценки скорости звука в воде в сети акустических узлов
Система и способ для генерирования сейсмических волн
Способ и устройство для измерения расстояния от узла до поверхности в сети акустических узлов
Подводное плавающее устройство
Способ и устройство для управления акустическими характеристиками сети акустических узлов, расположенных вдоль буксируемых акустических линейных антенн
Способ и устройство для оценки межузлового расстояния между узлом передатчика и узлом приемника

