Результат интеллектуальной деятельности: Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности
Вид РИД
Изобретение
Изобретение относится к области радиолокации и может быть использовано в РЛС для определения курса неманеврирующей аэродинамической цели (АЦ).
Известен способ, в котором текущий курс определяют как сумму курсового угла и азимута цели в предыдущем обзоре Q=qn+βn-1. Для определения курсового угла, то есть угла между линией визирования цели (между направлением «РЛС - АЦ») и направлением вектора скорости, вычисляют несколько вспомогательных величин: разность азимутов в соседних обзорах δβn; произведение дальности в последнем обзоре на синус разности азимутов bn=rnsinδβn; разность между дальностью в предыдущем обзоре и произведением дальности в последнем обзоре на косинус разности азимутов an=rn-1-rncosδβn; вспомогательный угол  По знаку (положительный или отрицательный) an и bn устраняют неоднозначность определения курса. Далее производят экспоненциальное сглаживание текущих значений курса [1, с. 360-365]. Недостаток способа: большие ошибки определения курса при грубых измерениях азимута.
По знаку (положительный или отрицательный) an и bn устраняют неоднозначность определения курса. Далее производят экспоненциальное сглаживание текущих значений курса [1, с. 360-365]. Недостаток способа: большие ошибки определения курса при грубых измерениях азимута.
Наиболее близким аналогом заявляемому способу (прототипом) является способ определения курса по выборкам прямоугольных координат. Для этого вычисляют оценки (сглаженные значения) скорости изменения прямоугольных координат  и
и  (горизонтальных составляющих вектора скорости) путем оптимального взвешенного суммирования фиксированных выборок прямоугольных координат. Затем вычисляют значение вспомогательного угла Q*, равное арктангенсу отношения абсолютных значений этих оценок:
(горизонтальных составляющих вектора скорости) путем оптимального взвешенного суммирования фиксированных выборок прямоугольных координат. Затем вычисляют значение вспомогательного угла Q*, равное арктангенсу отношения абсолютных значений этих оценок:  .
.
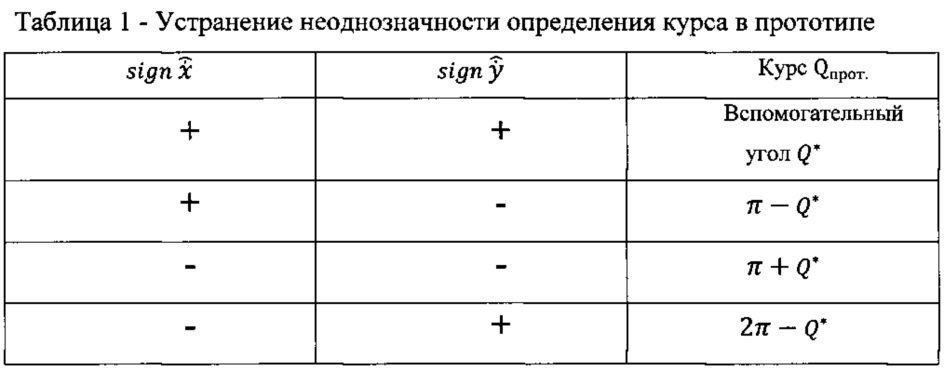
Для устранения неоднозначности определения курса используют информацию о знаке оценок  в соответствии с таблицей 1 [2, с. 314].
в соответствии с таблицей 1 [2, с. 314].
Как видно из фиг. 1-3, неоднозначность устраняется для всех траекторий.
Недостаток способа-прототипа: большие ошибки определения курса АЦ при грубых измерениях азимута цели.
Техническим результатом заявляемого изобретения является повышение точности определения курса за счет использования фиксированной выборки квадратов дальности.
Для достижения этого технического результата в заявляемом способе определения курса неманеврирующей аэродинамической цели с использованием фиксированной выборки квадратов дальности так же, как в прототипе, в РЛС измеряют дальность ri и азимут βi АЦ, преобразуют их в прямоугольные координаты (xi, yi). Путем оптимального взвешенного суммирования фиксированной выборки этих координат определяют оценки скорости изменения прямоугольных координат  и
и  Затем вычисляют оценку вспомогательного угла
Затем вычисляют оценку вспомогательного угла  и устраняют неоднозначность определения курса по знаку оценок
и устраняют неоднозначность определения курса по знаку оценок  и
и  . Если
. Если  и
и  больше нуля, то курс равен вспомогательному углу
больше нуля, то курс равен вспомогательному углу  . Если
. Если  больше нуля, а
больше нуля, а  меньше нуля, то курс равен
меньше нуля, то курс равен  . Если
. Если  и
и  меньше нуля, то курс равен
меньше нуля, то курс равен  . Если
. Если  меньше нуля, а
меньше нуля, а  больше нуля, то курс равен
больше нуля, то курс равен 
В отличие от прототипа согласно заявляемому изобретению определяют оценку радиальной скорости в середине интервала наблюдения  путем оптимального взвешенного суммирования фиксированной выборки измеренных значений дальности ri.
путем оптимального взвешенного суммирования фиксированной выборки измеренных значений дальности ri.
Кроме того, измеряют путевую скорость  Для этого перемножают цифровые сигналы дальности и получают значения квадратов дальности. Далее определяют оценку второго приращения квадрата дальности
Для этого перемножают цифровые сигналы дальности и получают значения квадратов дальности. Далее определяют оценку второго приращения квадрата дальности  за период обзора T0 путем оптимального взвешенного суммирования фиксированной выборки квадратов дальности. Затем вычисляют квадратный корень из этой оценки и делят на период обзора [3, 4]. После этого вычисляют курсовой угол в середине интервала наблюдения
за период обзора T0 путем оптимального взвешенного суммирования фиксированной выборки квадратов дальности. Затем вычисляют квадратный корень из этой оценки и делят на период обзора [3, 4]. После этого вычисляют курсовой угол в середине интервала наблюдения 
Путем оптимального взвешенного суммирования измеренных значений азимута βi определяют оценку азимута в середине интервала наблюдения  , среднеквадратическую ошибку этой оценки
, среднеквадратическую ошибку этой оценки  , где σβ - СКО измерения азимута.
, где σβ - СКО измерения азимута.
В отличие от прототипа, значение курса определяется неоднозначно.
Как видно из фиг. 1-3, курс может быть равен как сумме курсового угла и азимута  так и разности между азимутом и курсовым углом
так и разности между азимутом и курсовым углом  при одинаковых значениях радиальной скорости, азимута и дальности АЦ, а также при одинаковых или противоположных знаках оценок скорости изменения прямоугольных координат. Кроме того, как видно из фиг. 2, курс может быть равен
при одинаковых значениях радиальной скорости, азимута и дальности АЦ, а также при одинаковых или противоположных знаках оценок скорости изменения прямоугольных координат. Кроме того, как видно из фиг. 2, курс может быть равен  а из фиг. 3 получена следующая формула:
а из фиг. 3 получена следующая формула: 
Поэтому для устранения неоднозначности вычисляют суммы или разности между углами, равными курсовому углу  , азимуту
, азимуту  , π и 2π, то есть
, π и 2π, то есть  Затем сравнивают разность между полученными результатами и значением курса, определенного в прототипе
Затем сравнивают разность между полученными результатами и значением курса, определенного в прототипе  с СКО определения курса в заявляемом изобретении. Эту СКО вычисляют по формуле:
с СКО определения курса в заявляемом изобретении. Эту СКО вычисляют по формуле: 
где  - СКО определения курсового угла;
- СКО определения курсового угла;
σr - СКО измерения дальности;
N - объем фиксированной выборки;
rcp - дальность АЦ в середине интервала наблюдения.
Вычисляют СКО оценки курса в способе-прототипе по формуле:

Затем сравнивают СКО определения курса в заявляемом изобретении и в прототипе. На выход выдают значение курса с меньшей СКО.
Схема устройства, реализующего заявляемый способ, приведена в фиг. 4. Заявляемое устройство определения курса неманеврирующей аэродинамической цели с использованием фиксированной выборки квадратов дальности содержит так же, как прототип, измеритель курса по выборкам прямоугольных координат (блок 1), состоящий из преобразователя координат (блок 1.1), на входы которого подают данные измерений дальности и азимута, а первый и второй выходы соединены с входами первого и второго цифровых нерекурсивных фильтров (блоки 1.2 и 1.3, ЦНРФ-1 и ЦНРФ-2), выходы которых подключены к первому и второму входам вычислителя вспомогательного угла  (блок 1.4), выход которого соединен с первым входом блока устранения неоднозначности определения курса (блок 1.5).
(блок 1.4), выход которого соединен с первым входом блока устранения неоднозначности определения курса (блок 1.5).
В отличие от прототипа согласно заявляемому изобретению в схему дополнительно введены измеритель путевой скорости АЦ (блок 2), содержащий последовательно соединенные умножитель (блок 2.1), ЦНРФ-3 (блок 2.2), вычислитель квадратного корня (блок 2.3) и делитель на период обзора (блок 2.4), выход которого подключен к первому входу вычислителя курсового угла (блок 5), второй вход которого соединен с выходом измерителя радиальной скорости АЦ (блок 3), содержащего последовательно соединенные ЦНРФ-4 (блок 3.1) и делитель на период обзора (блок 3.2), на входы измерителей путевой и радиальной скорости подают данные измерений дальности, выход вычислителя курсового угла подключен к второму входу блока устранения неоднозначности определения курса в заявляемом устройстве (блок 6), первый вход которого подключен к выходу измерителя курса по выборкам прямоугольных координат (блок 1), а третий вход соединен с выходом ЦНРФ-5 оценивания азимута АЦ в середине интервала наблюдения (блок 4), на вход которого подают данные измерений азимута АЦ, выход блока устранения неоднозначности определения курса в заявляемом устройстве подключен к первому входу схемы сравнения (блок 7), второй вход которого соединен с выходом измерителя курса по выборкам прямоугольных декартовых координат (блок 1), а третий и четвертый входы соединены с выходами вычислителей СКО определения курса в прототипе и в заявляемом устройстве, первый и второй выходы схемы сравнения являются выходами заявляемого устройства.
Как видно из фиг. 4, основными блоками устройства являются цифровые нерекурсивные фильтры, построенные по одинаковой схеме (смотри фиг. 5). ЦНРФ содержит последовательно соединенные запоминающее устройство из N-1 элементов задержки (линии задержки, регистры сдвига и др.) на период обзора, блок умножителей на весовые коэффициенты из N умножителей и сумматор. Входной сигнал в текущем обзоре (uN) умножают на весовой коэффициент и подают на сумматор. Сигналы предыдущих обзоров (uN; uN-1, …, u2, u1) задерживают на соответствующее число обзоров и умножают на весовые коэффициенты. В итоге на входе сумматора формируют фиксированную выборку из N взвешенных сигналов, а на выходе сумматора получают оценку (сглаженное значение) сигнала или его первого и второго приращения в выбранной точке интервала наблюдения.
ЦНРФ отличаются друг от друга типом входного сигнала и весовыми коэффициентами. Так ЦНРФ-1, 2, 4 (блоки 1.2, 1.3 и 3.1) используют весовые коэффициенты оценивания первого приращения, вычисляемые по формуле:  В ЦНРФ-3 используют весовые коэффициенты оценивания второго приращения
В ЦНРФ-3 используют весовые коэффициенты оценивания второго приращения  а в ЦНРФ-5 - весовые коэффициенты оценивания азимута в середине интервала наблюдения
а в ЦНРФ-5 - весовые коэффициенты оценивания азимута в середине интервала наблюдения  [2, с. 151-155].
[2, с. 151-155].
Для доказательства реализуемости заявленного технического результата вычислим СКО определения курса для следующего случая. АЦ летит к РЛС параллельно оси Y (курс Q=180°) с курсовым параметром r0=50 км (см. фиг. 6). Длина интервала наблюдения АС («скользящего окна») равна 30 км, время оценивания - 2 минуты.
СКО определения курса в заявляемом изобретении и в прототипе приведены в таблицах 2 и фиг. 6. Как видно из таблицы 2 и графиков фиг. 3, при ошибках измерения дальности σr=50 м заявляемое изобретение обеспечивает большую точность определения курса по сравнению с прототипом начиная с дальности 220 км, а при σr=25 м точность выше в полтора раза чем в прототипе уже на дальности 300 км.
В заявляемом изобретении, в отличие от прототипа, точность определения курса практически не зависит от ошибок измерения азимута. Как видно из табл. 2, СКО сглаженного значения азимута АЦ в середине интервала наблюдения не превышает 0,62°.
Следует отметить, что проблематично существенно уменьшить ошибки измерения азимута в РЛС метрового диапазона, размеры антенны которых соизмеримы с длиной волны. В то же время ошибки измерения дальности не зависят от размеров антенны. Например, в американской РЛС AN/TPS-59 достигнута точность измерения дальности около 30 метров [5, с. 36].
Таким образом, доказана промышленная реализуемость технического результата заявляемого изобретения: повышение точности определения курса неманеврирующей аэродинамической цели за счет использования фиксированной выборки квадратов дальности и уменьшения влияния ошибок измерения азимута.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: «Радио и связь», 1967.
2. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: «Сов. радио», 1974.
3. Способ определения модуля скорости аэродинамической цели. Патент на изобретение №2559296.
4. Устройство радиолокационного определения путевой скорости неманеврирующей воздушной цели. Патент на полезную модель №152617.
5. Радиоэлектронные системы: основы построения и теория. Справочник / Под ред. Я.Д. Ширмана. - М: ЗАО «МАКВИС», 1998.


























Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации
Обнаружитель маневра баллистической ракеты по фиксированной выборке произведений дальности на радиальную скорость
Способ разведки целей из образцов вооружения подразделения
Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации
Маркерный автоматный патрон
Расходомер топлива для дизельных двигателей автотранспортных средств
Способ работы гибридного дизель-контактного маневрового локомотива с накопителями энергии и маневровый локомотив
Устройство защиты бронированной техники на марше от воздействия кассетных боевых элементов с многоканальными датчиками целей
Двухпоточная трансмиссия танка
Трансмиссия гусеничной машины
Способ определения модуля скорости баллистического объекта с использованием выборки произведений дальности на радиальную скорость и устройство для его реализации
Обнаружитель маневра баллистической ракеты по фиксированной выборке произведений дальности на радиальную скорость
Способ разведки целей из образцов вооружения подразделения
Способ радиолокационного определения путевой скорости неманеврирующей аэродинамической цели по выборке произведений дальности на радиальную скорость и устройство для его реализации
Способ радиолокационного определения вертикальной скорости баллистического объекта и устройство для его реализации
Способ и устройство определения модуля скорости баллистического объекта с использованием выборки квадратов дальности
Способ радиолокационного сопровождения объектов и рлс для его реализации
Устройство распознавания воздушно-космических объектов в двухдиапазонных радиолокационных комплексах с активными фазированными антенными решетками (афар)
Способ и устройство защиты от "ангелов" при комплексировании рлс разных диапазонов
Способ определения модуля скорости неманеврирующей аэродинамической цели по выборкам измерений дальности

