Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ДВИЖЕНИЯ ГРЕБНОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ ЛОДКА-ГРЕБЕЦ-ВЁСЛА И СИЛ НА ЕЁ ЭЛЕМЕНТАХ
Вид РИД
Изобретение
Изобретение относится к области измерений, а именно к области измерений в спорте, и может быть использовано в тренировочном процессе в спортивной (академической) гребле для повышения его эффективности. Основным техническим результатом предложения является расширение спектра и повышение точности измерения сил, определяемых на элементах гребной механической системы.
Дополнительным техническим результатом предложения является уменьшение времени предстартовой подготовки системы в тренировочном процессе.
Известен способ определения кинематических параметров движения гребной механической системы и сил на ее элементах (первый аналог), в котором непосредственно измеряют ускорение и скорость лодки вдоль ее продольной оси (См. Патент 20050170711 А1 США. Method and apparatus of information systems for rowers [Текст] / заявитель Robert M. Spencer, Timothy C. Mickelson).
Однако известный способ (первый аналог) обеспечивает определение только узкого спектра кинематических параметров движения гребной механической системы и не обеспечивает определение сил на ее элементах.
Известен способ определения кинематических параметров движения гребной механической системы и сил на ее элементах (второй аналог), в котором измеряют ускорение и скорость лодки вдоль ее продольной оси, угол поворота весла в вертлюге вокруг вертикальной оси и непосредственно измеряют с помощью тензометрического датчика силу в вертлюге (См.. Sport. RowX Outdoor, www.webasport.com/weba/rowx_outdoor.html. [Электронный ресурс]).
Однако известный способ (второй аналог) обеспечивает определение только узкого спектра кинематических параметров движения гребной механической системы и спектра сил на ее элементах. При этом силы на рукоятке и лопасти весла определяют только приближенно путем пересчета в них силы, измеряемой на вертлюге, на основе модельных алгебраических соотношений, описывающих статическое распределение сил на весле. Силу на подножке в известном способе не определяют. Узость определяемого спектра кинематических параметров движения и сил на элементах системы, а также существенные погрешности в определении сил предопределяют невысокую эффективность использования этой информации в тренировочном процессе в спортивной гребле.
Наиболее близким к заявляемому способу является способ определения кинематических параметров движения гребной механической системы и сил на ее элементах (прототип), в соответствии с которым непосредственно измеряют ускорение и скорость лодки вдоль ее продольной оси, перемещение гребца относительно лодки вдоль ее продольной оси, угол поворота весла в вертлюге вокруг вертикальной оси, определяют силы на подножке и на весле (См.. BioRow Ltd. BioRowTel telemetry system. http://www.biorow.comPS_files/BioRowTel.pdf. [Электронный ресурс]).
Однако известный способ (прототип) не обеспечивает определение с высокой точностью сил на ручке весла, на его лопасти и на вертлюге вследствие того, что на весле определяется только единственная сила, причем в области, расположенной между рукояткой весла и вертлюгом. Затем она приближенно пересчитывается в силы на рукоятке весла, на его лопасти и на вертлюге. Кроме того, использование тензометров для определения сил на весле и на подножке предопределяет необходимость выделения значительного времени для предварительной калибровки тензометров перед началом тренировки в период предстартовой подготовки системы. Отсутствие высокоточной информации обо всем спектре сил на элементах системы и значительные временные затраты на предварительную калибровку тензометров существенно снижают эффективность тренировочного процесса в спортивной гребле.
Основным техническим результатом предложения является расширение спектра и повышение точности измерения сил, определяемых на элементах гребной механической системы.
Дополнительным техническим результатом предложения является уменьшение времени предстартовой подготовки системы в тренировочном процессе. Эти ожидаемые технические результаты предопределяют повышение эффективности тренировочного процесса в спортивной гребле.
Указанные технические результаты достигаются тем, что в способе определения кинематических параметров движения гребной механической системы лодка-гребец-весла и сил на ее элементах, в соответствии с которым непосредственно измеряют ускорение ал и скорость vл лодки вдоль ее продольной оси, измеряют угловую скорость ωв и угол αв поворота весла в вертлюге вокруг вертикальной оси, измеряют перемещение гребца sгл относительно лодки вдоль ее продольной оси, вычисляют ускорение гребца агл относительно лодки вдоль ее продольной оси путем дифференцирования перемещения sгл, для определения сил на элементах системы вычисляют угловое ускорение εв поворота весла путем дифференцирования угловой скорости ωв, вычисляют гидродинамическую силу сопротивления движению лодки Fгд по соотношению Fгд=-cvл2, где с - коэффициент гидродинамического сопротивления, вычисляют силы инерции, возникающие при поступательных движениях лодки Fил и гребца Fиг, поступательном и вращательном движениях весла Fив, соответственно, по соотношениям: Fил=mл ал; Fиг=mг(ал+аг), Fив=2((mв+λв)(ал cosαв+εв lцмв)-λвvлωв sinαв), где mл, mг, mв - соответственно массы лодки, гребца и весла; λв - присоединенная масса весла вдоль оси, перпендикулярной лопасти весла; lцмв расстояние от вертлюга до центра масс весла, вычисляют момент сил инерции весла Мив, возникающий при его вращательном движении и поступательном движении лодки, по соотношению Мив=2((jв+kв)εв+λв(vл cosαв+ωв lцмв)vл sinαв), где jв, kв - соответственно момент и присоединенный момент инерции весла вокруг вертикальной оси, проходящей через центр масс весла, определяют силы на подножке Fп, на рукоятке весла Fр, на вертлюге Fвер, на лопасти весла Fлоп, соответственно, по соотношениям:
Fп=-((Fил+Fгд+Fиг+Fив cosαв)lлоп+Fиг lр+(Fив lцмв-Мив)cosαв)/lр;
Fр=((Fил+Fгд+Fиг)(lлоп+lр)-(Fив lцмв+Мив)cosαв)/(lр cosαв);
Fв=((Fил+Fгд+Fиг)(lлоп+lр)+Fив cosαв lлоп-(Fив lцмв+Мив)cosαв)/(lp cosαв);
Fлоп=((Fил+Fгд+Fиг+Fив cosαв))/cosαв,
где lp, lлоп - расстояния от вертлюга до центров рукоятки и лопасти весла
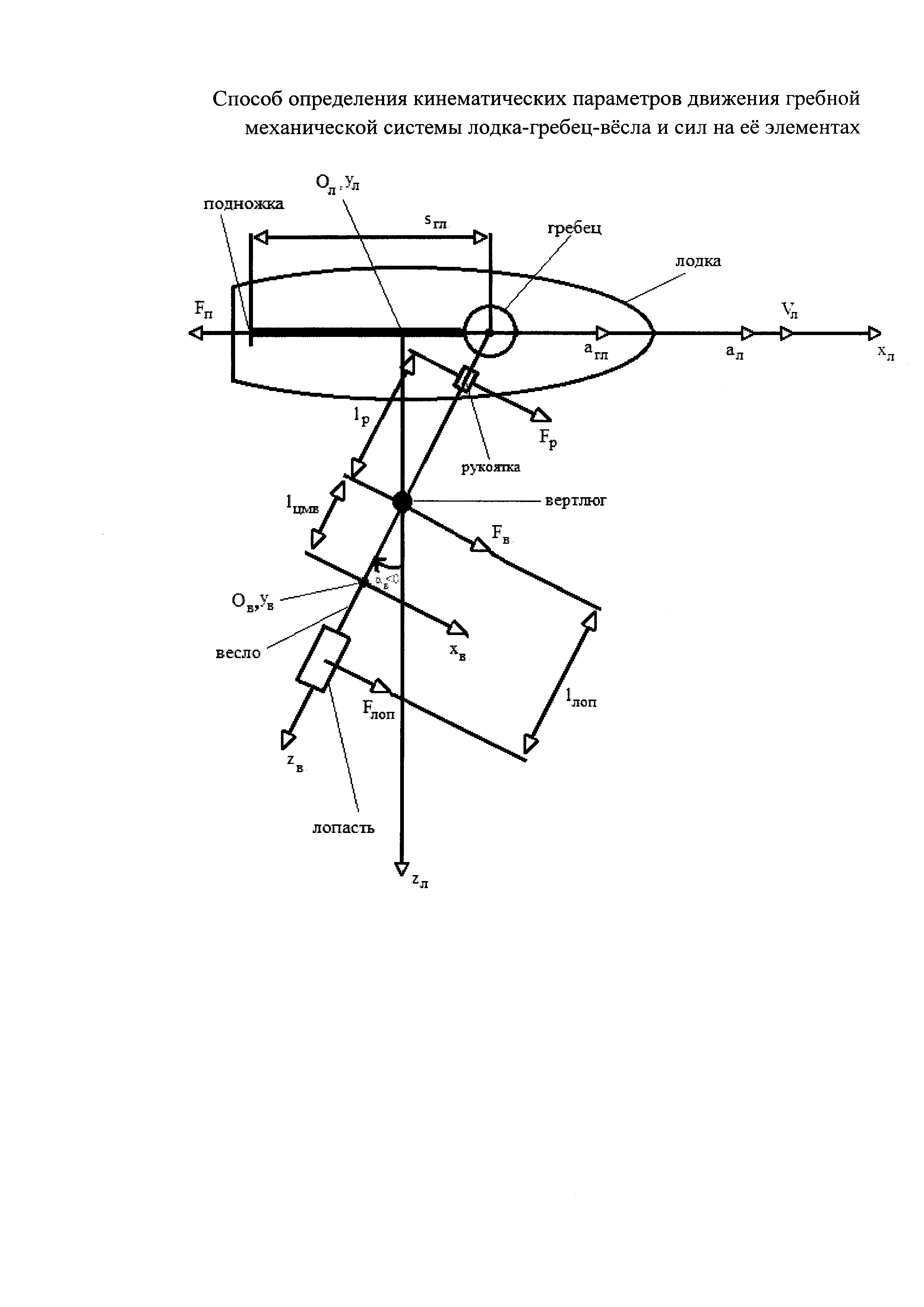
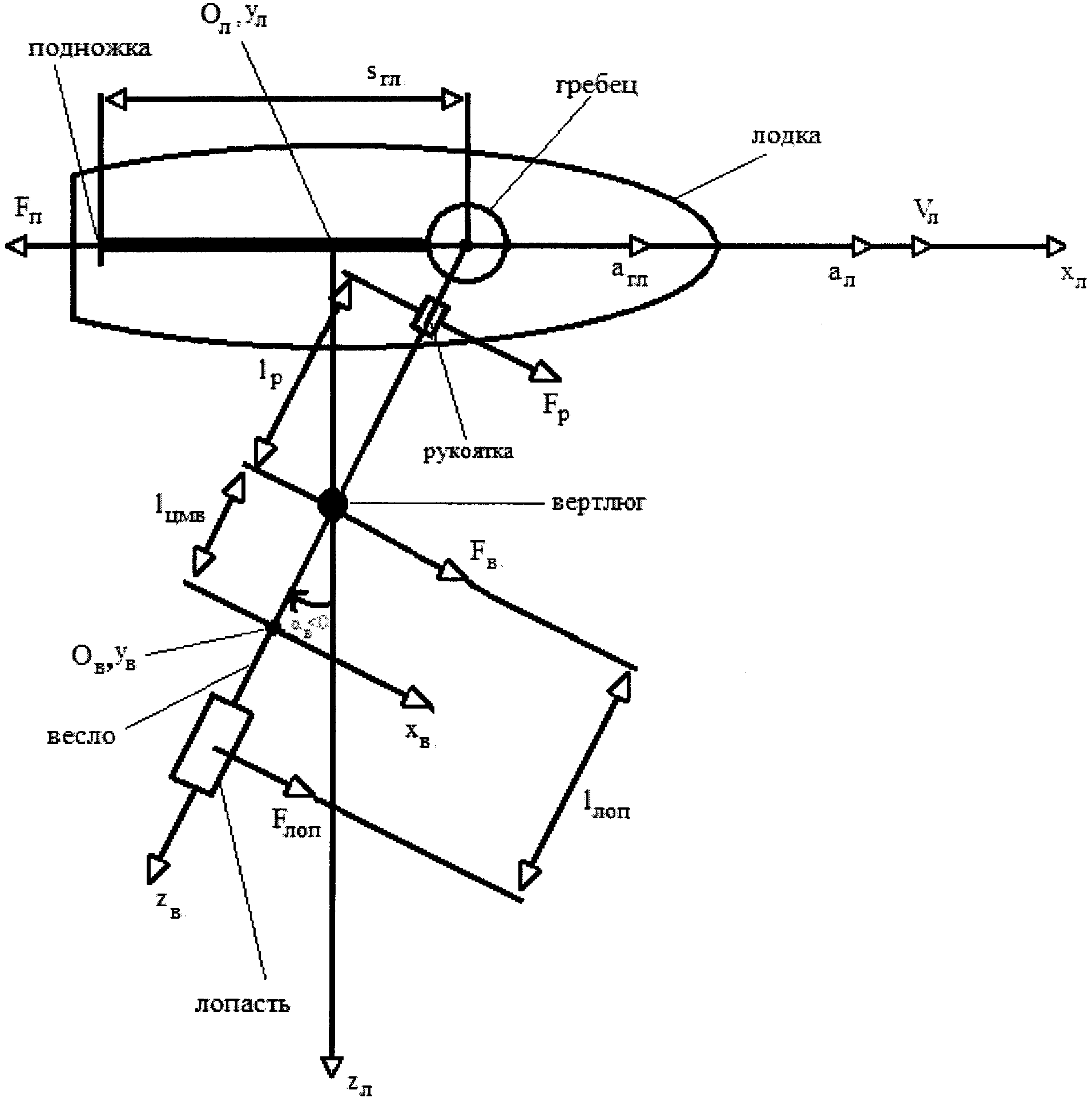
На чертеже представлена схема приложения сил на элементах гребной механической системы. Здесь обозначены: Oлxлyлzл - система координат с началом в центре масс лодки Ол, жестко связанная с лодкой (Oлхл - направлена по продольной оси лодки, Олул - по вертикальной оси, Олzл - по правому борту); Oвxвyвzв - система координат с началом в центре масс весла Ов, жестко связанная с веслом (Овхв - горизонтальна и перпендикулярна оси весла, Овув - вертикальна и перпендикулярна оси весла, Oвzв - направлена по оси весла); vл, ал - соответственно скорость и ускорение лодки вдоль ее продольной оси Олхл; sгл, агл - соответственно перемещение гребца, отсчитываемое от подножки, и его ускорение относительно лодки вдоль ее продольной оси; αв - угол поворота весла в вертлюге, отсчитываемый вокруг вертикальной оси от поперечной оси Олzл лодки; lр, lлоп, lцмв, - расстояния от вертлюга до центров рукоятки, лопасти и центра масс весла соответственно; Fп, Fр, Fв, Fлоп - соответственно силы на подножке (приложена со стороны ног гребца), на рукоятке (приложена со стороны кистей рук гребца), на вертлюге и на лопасти весла.
Уравнения движения гребной механической системы в горизонтальной плоскости, пренебрегая, в силу малости, углами дифферента, рыскания и атаки, можно представить в виде:
- уравнение движения лодки:

- уравнение движения гребца вдоль продольной оси лодки Олхл:

- уравнение движения весла в проекции на связанную с веслом ось Овхв:

- уравнение углового движения весла вокруг оси Овyв:

Уравнения (1-4) можно трактовать как систему линейных алгебраических уравнений относительно искомых сил Fп, Fв, Fр, Fлоп на элементах гребной механической системы при известных зависимостях от времени кинематических параметров движения элементов гребной механической системы, фигурирующих в левой части уравнений (1-4). Разрешая эту систему, получим соотношения для искомых сил на элементах гребной механической системы в виде:
Fп=-((Fил+Fгд+Fиг+Fив cosαв)lлоп+Fиг lр+(Fив lцмв-Мив)cosαв)/lр;
Fр=((Fил+Fгд+Fиг)(lлоп+lр)-(Fив lцмв+Мив)cosαв)/(lp cosαв);
Fв=((Fил+Fгд+Fил)(lлоп+lp)+Fив cosαв lлоп-(Fив lцмв+Мив)cosαв)/(lр cosαв);
Fлоп=((Fил+Fгд+Fиг+Fив cosαв))/cosαв,
где Fгд=-cvл2 - гидродинамическая сила сопротивления движению лодки (с - коэффициент гидродинамического сопротивления); Fил=mлал, Fиг=mг(ал+аг), Fив=2((mв+λв)(ал cosαв+εв lцмв)-λв vл ωв sinαв) - соответственно силы инерции, возникающие при поступательных движениях лодки и гребца, поступательном и вращательном движениях весла; Мив=2((jb+kd)εd+λd(vл cosαв+ωв lцмв)vл sinαв) - момент сил инерции весла, возникающий при его вращательном движении и поступательном движении лодки; mл, mг, mв - соответственно массы лодки, гребца и весла; λв - присоединенная масса весла вдоль оси, перпендикулярной лопасти весла; lр, lлоп lцмв - соответственно расстояния от центров рукоятки, лопасти и центра масс весла до вертлюга; jв, kв - соответственно момент и присоединенный момент инерции весла вокруг вертикальной оси, проходящей через центр масс весла.
Последовательность действий по определению искомых сил на элементах гребной механической системы при известных массовых, геометрических и гидродинамических параметрах системы такова. В процессе гребли измеряют абсолютные ускорение ал и скорость vл лодки вдоль ее продольной оси, перемещение гребца sгл относительно лодки вдоль ее продольной оси, угол αв и угловую скорость ωв поворота весла в вертлюге вокруг вертикальной оси, вычисляют ускорение гребца агл относительно лодки вдоль ее продольной оси путем дифференцирования перемещения sгл, вычисляют угловое ускорение весла εв путем дифференцирования угловой скорости ωв, вычисляют гидродинамическую силу Fгд, силы инерции Fил, Fиг, Fив и момент сил инерции Мив по соответствующим соотношениям для них, фигурирующим в левых частях уравнений (1-4), определяют искомые силы на элементах гребной механической системы по соотношениям (5).
Таким образом, при реализации предложения достигается расширение спектра и повышение точности определения сил на элементах гребной механической системы на основе адекватной математической модели системы с использованием для этих целей информации о кинематических параметрах движения ее элементов. Кроме того, отказ от непосредственного использования силоизмерителей (в частности, тензометров) при определении сил на рукоятке весла приводит к уменьшению времени подготовки всей измерительной системы к работе, поскольку датчики кинематических параметров движения, в отличие от тензометров, не нуждаются в предварительной калибровке при каждой установке на лодку. В результате при реализации предложения в целом повышается эффективность тренировочного процесса в спортивной гребле.
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Устройство для измерения уклонов профиля поверхности аэродромных покрытий
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Устройство для измерения уклонов профиля поверхности аэродромных покрытий
Способ измерения максимальной плотности потока энергии электромагнитного поля в точках окрестности оси главного излучения антенны сотовой связи при помощи беспилотного летательного аппарата вертолётного типа

