Результат интеллектуальной деятельности: ЧЕРЕЗПЛОСКОСТНОЙ НАВИГАТОР
Вид РИД
Изобретение
Предмет настоящей заявки относится в общем к магнитно-резонансному (МР) формированию изображения в медицинских целях. Он находит конкретное применение в отношении обнаружения и коррекции движения при формировании изображения методом МР и будет описан конкретно в этом отношении. Однако следует понимать, что он также находит применение в других сценариях использования и необязательно ограничен вышеупомянутым применением.
При формировании изображения головы, движение твердого тела субъекта происходит в 3 измерениях (3D) в виде движения в плоскости и движения через плоскость относительно среза/пласта, возбужденного для сканирования МРТ. Например, при 2D многосрезовом осевом или поперечном сканировании, субъекты будут отвечать на вопросы утвердительно кивком головы, который является, главным образом, вращением через плоскость вокруг оси «лево-право». Покачивание головой из стороны в сторону в качестве жеста для отрицательного ответа на вопрос является вращательным движением, главным образом, в осевой плоскости формирования изображения, но также включает в себя некоторые аспекты движения через плоскость. Коррекция движения через плоскость может происходить ретроспективно или перспективно. Ретроспективные методы, например PROPELLER (периодический поворот перекрывающихся параллельных линий с улучшенной реконструкции), не корректируют движение через плоскость при 2-мерном (2D) многосрезовом формировании изображения вследствие несогласованного объема формирования изображения. Одна категория, образованная перспективными методами, предусматривает использование дополнительного оборудования, которое требует установки и калибровки, которые продлевают общее время сканирования. Вторая категория, образованная ретроспективными методами, предусматривает использование навигационного модуля с дополнительным радиочастотным (РЧ) возбуждением, который восприимчив к помехе от РЧ возбуждения последовательности формирования изображения.
В настоящей заявке раскрыт новый и усовершенствованный черезплоскостной навигатор, который решает вышеупомянутые и другие проблемы.
В соответствии с одним аспектом магнитно-резонансный сканер включает в себя главный магнит, градиентные катушки и контроллер градиентных катушек, одну или более РЧ катушек, РЧ передатчик, РЧ приемник и один или более процессоров. Главный магнит формирует поле B0. Градиентные катушки и контроллер градиентных катушек формируют градиенты через поле B0. Одна или более РЧ катушек передают импульсы B1, принимают магнитно-резонансные сигналы. РЧ передатчик передает импульсы B1 на РЧ катушки для возбуждения резонанса и манипулирования им. РЧ приемник демодулирует принятые резонансные сигналы в линии данных. Один или более процессоров соединены с контроллером градиентных катушек, РЧ передатчиком и РЧ приемником и запрограммированы управлять РЧ передатчиком и контроллером градиентных катушек для реализации перемеженной многосрезовой 2D последовательности формирования изображения, которая в каждом из множества TR формирует первую и вторую линии навигационных данных и по меньшей мере одну линию данных изображения для каждого из множества срезов. Один или более процессоров дополнительно запрограммированы реконструировать первые линии навигационных данных из множества срезов в первое проекционное изображение навигации, реконструировать вторые линии навигационных данных из множества срезов во второе навигационное изображение; и сравнивать последовательные проекционные изображения навигации для обнаружения и корректировки 3D движения.
В соответствии с другим аспектом способ магнитно-резонансного формирования изображения включает в себя реализацию перемеженной многосрезовой 2D последовательности формирования изображения, в которой каждое из множества повторений (TR) формирует первую и вторую линии навигационных данных и по меньшей мере одну линию данных формирования изображения для каждого из множества срезов. После каждого TR, первые линии данных из множества срезов реконструируются в первое проекционное изображение навигации. После каждого TR, первые линии данных из множества срезов реконструируются во второе проекционное изображение навигации. Последовательные проекционные изображения навигации сравниваются для обнаружения и корректировки 3D движения.
В соответствии с другим аспектом, магнитно-резонансный сканер включает в себя один или более процессоров, которые получают данные из каждой последовательности эхо-сигналов в перемеженной 2D многосрезовой последовательности формирования изображения в каждом из множества повторений TR, причем последовательность формирования изображения формирует в каждом из множества срезов линии навигационных данных, ортогональные друг другу, и линии данных формирования изображения, параллельные друг другу. Линии навигационных данных из множества срезов реконструируются в ортогональные навигационные изображения после каждого повторения TR. Последовательные реконструированные навигационные изображения сравниваются из каждого времени повторения для обнаружения движения. Линии данных формирования изображения и/или перемеженная 2D многосрезовая последовательность формирования изображения переориентируется на основании обнаруженного движения в сравниваемых навигационных изображениях.
Одно преимущество состоит в быстром методе динамического обнаружения и коррекции движения.
Другое преимущество включает в себя продолжение получения данных для формирования изображения срезов, когда происходит движение.
Другое преимущество состоит в отсутствии дополнительного оборудования.
Другое преимущество состоит в самонавигации при необходимости.
Другое преимущество включает в себя обнаружение и коррекцию движения твердого тела.
Кроме того, преимущества настоящей заявки станут понятны специалистам в данной области техники по ознакомлении с нижеследующим подробным описанием.
Изобретение можно реализовать в различных компонентах и конфигурациях компонентов и в различных этапах и конфигурациях этапов. Чертежи приведены исключительно в целях иллюстрации предпочтительных вариантов осуществления и не призваны ограничивать изобретение.
Фиг. 1 - схема варианта осуществления системы МР формирования изображений.
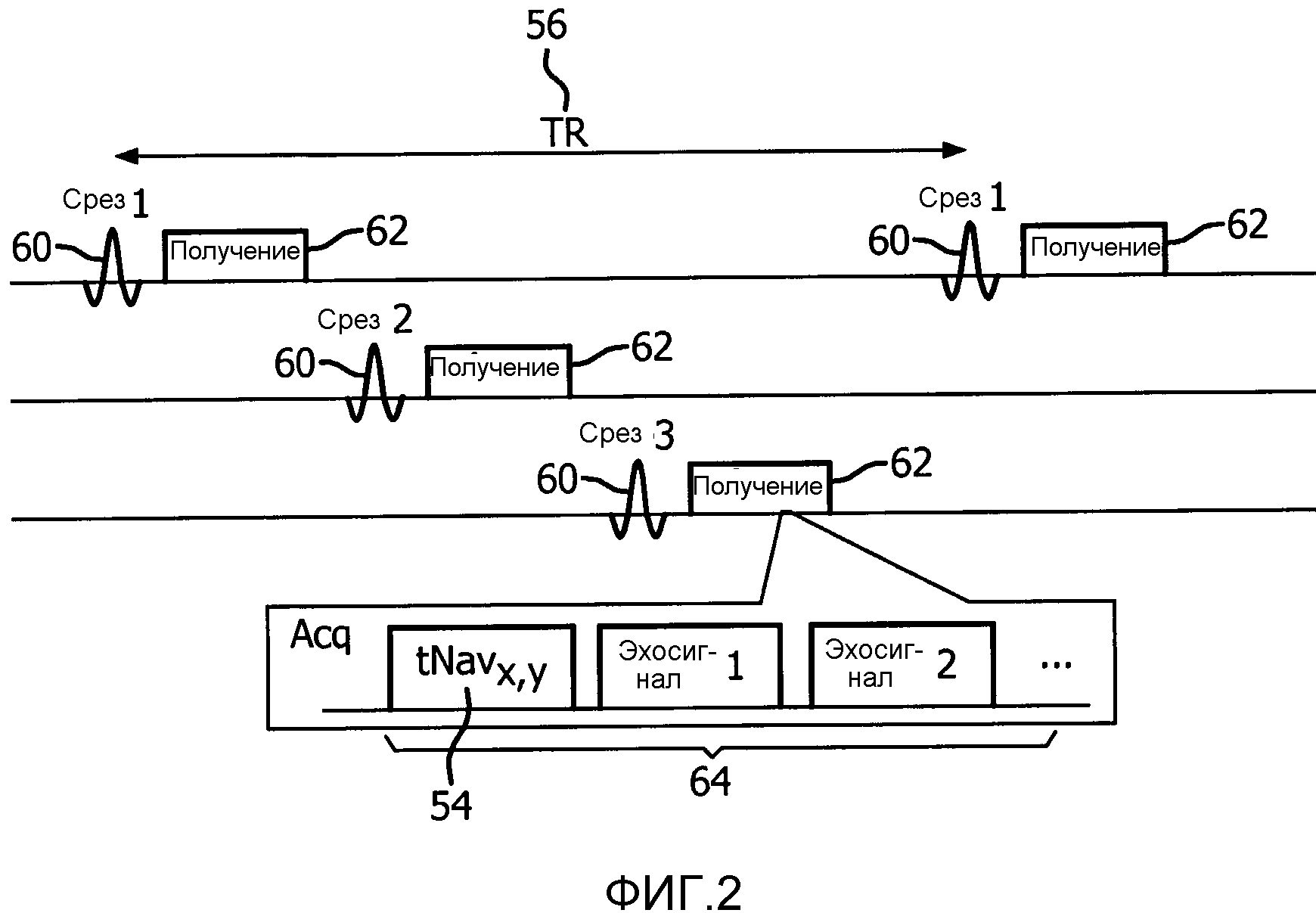
Фиг. 2 - схема одного варианта осуществления перемеженной последовательности МР формирования изображения с навигационным эхо-сигналом.
Фиг. 3 - схема, демонстрирующая пространственные соотношения между плоскостями навигатора и плоскостью формирования изображения.
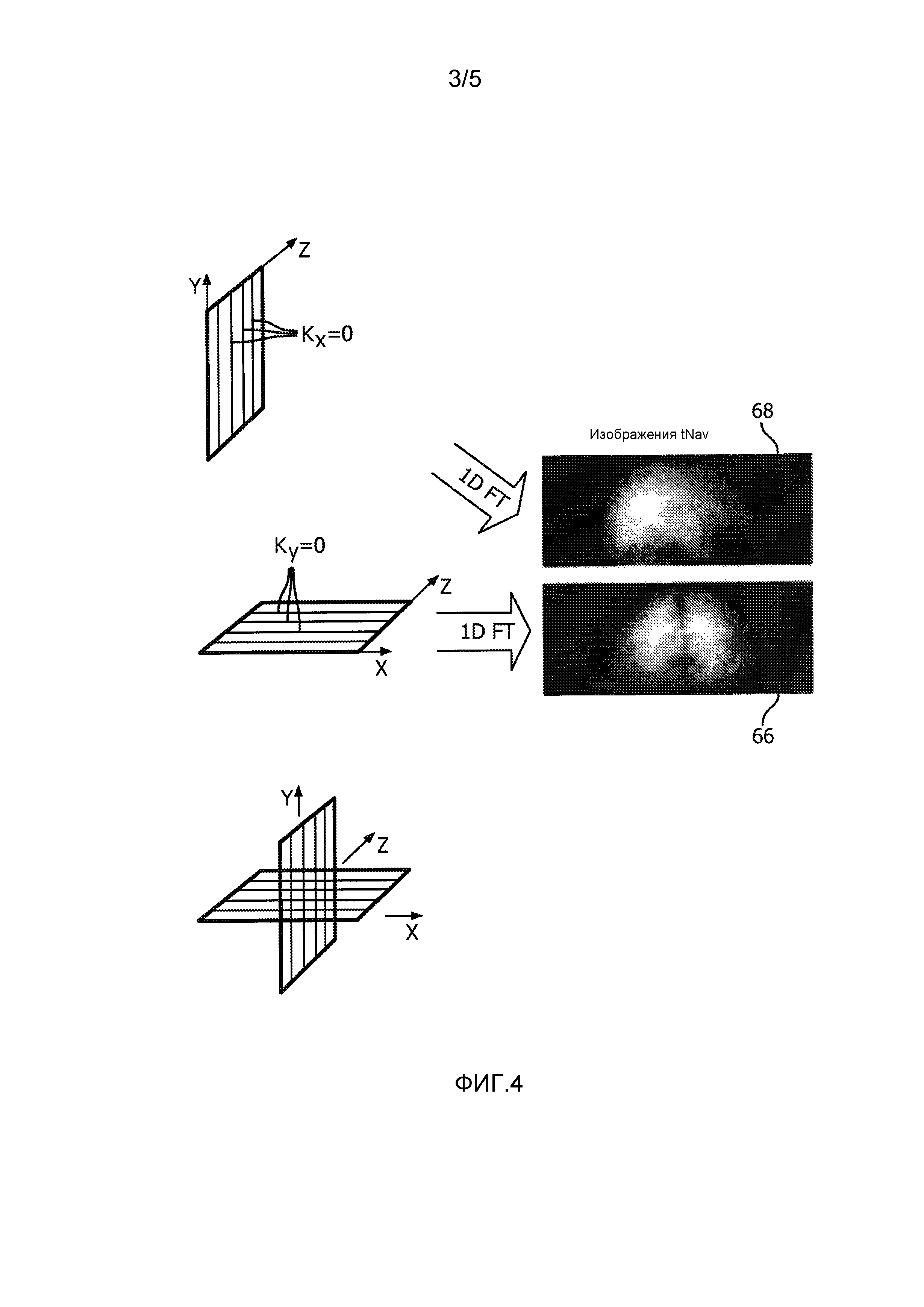
Фиг. 4 - пример реконструированных навигационных изображений.
Фиг. 5 - пример обнаружения движения с использованием плоскостей навигации.
Фиг. 6 - блок-схема способа формирования изображений согласно одному варианту осуществления.
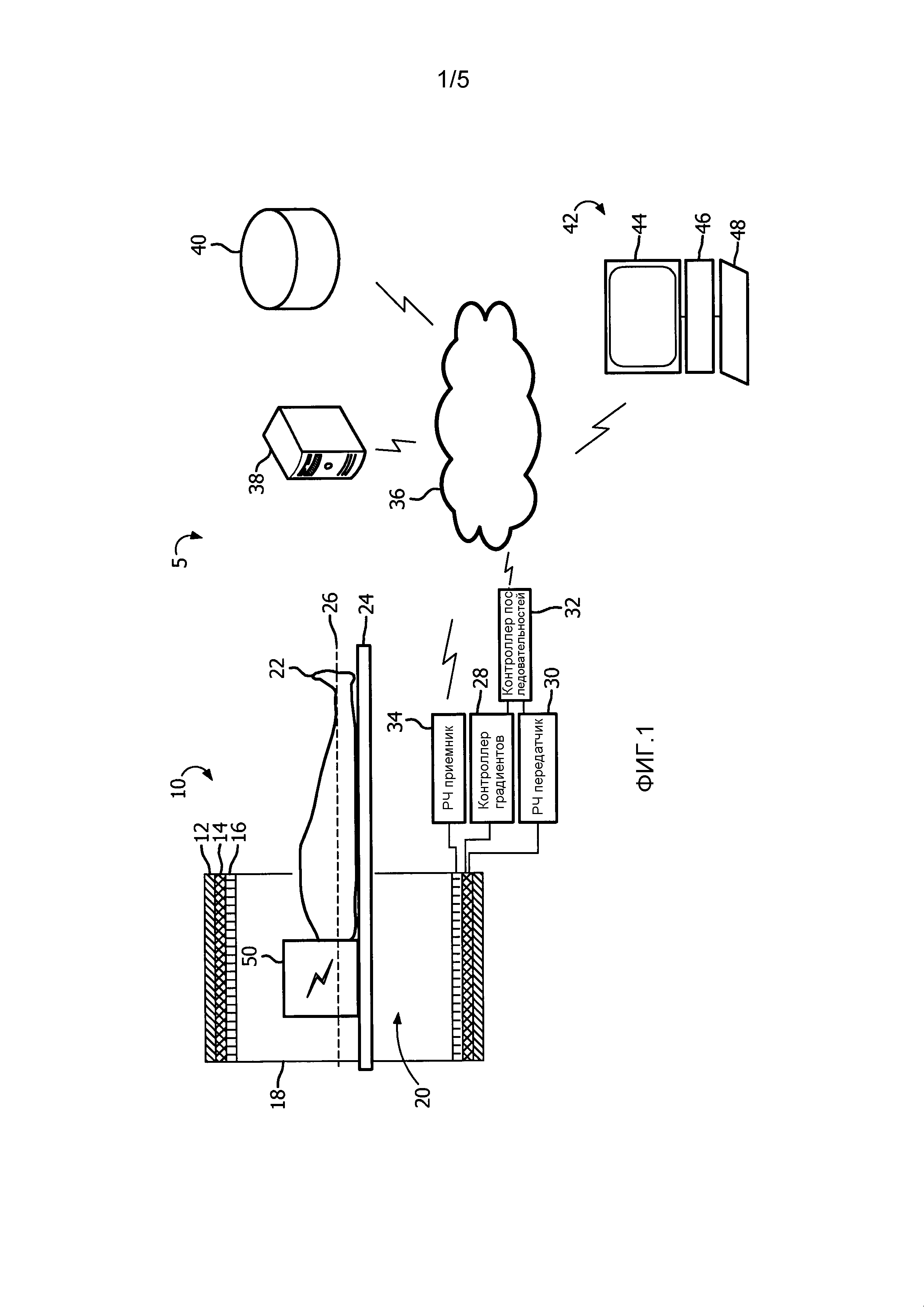
На фиг. 1 схематически показан вариант осуществления системы 5 МР формирования изображений. Вид в разрезе МР сканера 10 демонстрирует главные магнитные катушки 12, градиентные обмотки 14 и РЧ катушки 16. Катушки и/или обмотки заключены в корпусе 18 тороидальной формы с открытым центральным каналом 20. Субъект 22 проходит через канал 20, будучи поддерживаем на опоре 24 субъекта, которая перемещается непрерывно или пошагово. Субъект перемещается параллельно оси 26, проходящей по центру канала 20 сканера 10. Область сканирования располагается в канале 20, например в области рядом с изоцентром. Главные магнитные катушки 12 формируют главное магнитное поле B0. Градиентные 14 и/или РЧ катушки 16 формируют поля B1 или РЧ импульсы возбуждения в любой из различных конфигураций в течение фазы передачи. Градиентные катушки 14 управляются градиентным контроллером 28 для создания градиентов магнитного поля через поле B0. РЧ катушки 16 управляются РЧ передатчиком 30. Работу градиентного контроллера 28 и РЧ передатчика 30 координирует контроллер 32 последовательностей. Контроллер 32 последовательностей управляет хронированием передачи или формирования магнитных полей для реализации выбранной последовательности формирования изображения. РЧ приемник 34 демодулирует резонансные сигналы, регистрируемые РЧ катушками 16 или локальной катушкой, для формирования данных изображения. Контроллер или процессор 32 последовательностей и РЧ приемник 34 соединены с сетью 36. Сеть может представлять собой прямое соединение, непрямое соединение, проводную конфигурацию, беспроводную конфигурацию, локальную, удаленную, частную сеть, интернет или некоторую комбинацию.
Контроллер 32 сканирования отдельно или совместно с одним или более системными процессорами 38, сконфигурированный в одном или более серверах, запрограммированы управлять сканером 10 таким образом, чтобы он осуществлял выбранный протокол формирования изображения. Один или более процессоров 38 принимают и обрабатывают полученные данные формирования изображения от РЧ приемника. Один или более процессоров 38 включают в себя локальную память и/или соединение с запоминающим устройством 40. Полученные данные реконструируются одним или более процессорами 38 в изображения, например, несколько параллельных 2D срезов изображения, 3D объемное изображение и т.п. Программное обеспечение формирования изображения управляет одним или более процессорами 38 и включает в себя непереходные компьютерные инструкции, которые могут храниться в запоминающем устройстве 40, например базе данных историй болезни пациентов, локальном диске, сетевом хранилище и пр.
Рабочая станция 42 формирования изображения соединена с сетью 36. Рабочая станция 42 формирования изображения включает в себя устройство 44 отображения, один или более процессоров 46 и один или более устройств 48 ввода. Устройство 44 отображения отображает изображения, например, 2D срезы изображения. Устройство 44 отображения также может отображать меню, экраны ввода, панели, списки последовательностей формирования изображения и пр., позволяющие медицинскому работнику выбирать протокол формирования изображения. Медицинский работник использует одно из устройств 48 ввода, например клавиатуру, мышь, микрофон и пр. для ввода информации, например информации о субъекте, протокола сканирования, инструкций манипулирования изображениями и пр. Один или более процессоров 46 могут входить в состав или быть отдельными от одного или более процессоров 38, которые управляют последовательностью формирования изображения и принимают данные формирования изображения. Рабочая станция 42 формирования изображения может представлять собой настольный компьютер, портативный компьютер, планшет, мобильное устройство и пр. Изображения, данные о пациентах и другие данные сохраняются в истории болезни пациента в запоминающем устройстве 50, например, в базе данных карт стационарных больных.
При необходимости используется одна или более локальных РЧ катушек 50. Локальная катушка 50 может быть проводной или беспроводной. Локальная катушка включает в себя форму и конфигурацию, пригодную для формирования изображения локальной области субъекта. Например, локальные катушки включают в себя катушки для головы, катушки для позвоночника, катушки TMJ и пр. Локальная катушка может формировать поля B1 или может быть катушкой только для приема. Согласно варианту осуществления катушки только для приема, РЧ катушки 16 формируют импульсы возбуждения резонанса и манипулирования им, и локальные катушки регистрируют резонансные сигналы, которые демодулируются приемником 34 для выработки данных изображения. Данные формирования изображения передаются на один или более процессоров 38 для реконструкции изображения.
Хотя на чертеже показан сканер на основе магнита с центральным каналом, можно также рассматривать сканеры на основе C-образного магнита, открытые сканеры, и пр.
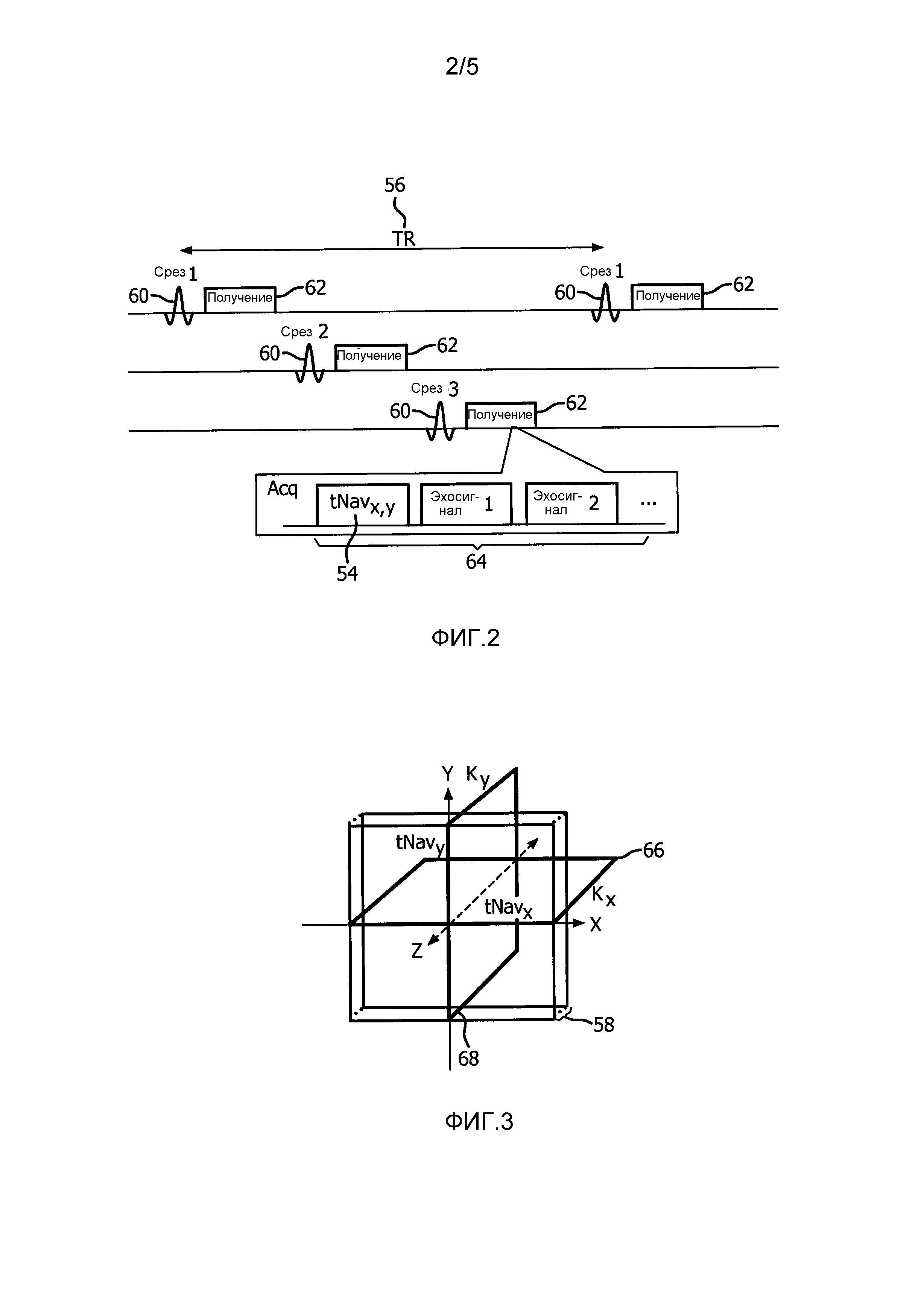
Фиг. 2 демонстрирует перемеженную последовательность МР 52 формирования изображения с навигационным эхо-сигналом 54 согласно одному варианту осуществления. Данные изображения получаются для множества срезов 58 (фиг. 3), например, в плоскости x, y, в течение одного времени 56 повторения (TR) перемеженной последовательности 52 формирования изображения. Импульс 60 возбуждения возбуждает резонанс, который кодируется РЧ и градиентными импульсами согласно выбранной последовательности формирования изображения для формирования резонансных сигналов, которые считываются на фазе 62 получения для каждого 58 среза. При формировании изображения методом МР в реальном времени, время 56 повторения обычно составляет около 20-30 миллисекунд. Согласно примеру, эхо-сигнал tNavx,y или навигационный эхо-сигнал 54, эхо-сигнал 1 и эхо-сигнал 2 включаются в последовательность 64 эхо-сигналов фазы 62 получения. Таким образом, контроллер последовательностей управляет контроллером градиентных катушек и РЧ передатчиком для индуцирования двух навигационных эхо-сигналов, которые считываются приемником в качестве линии данных kx=0 и ky=0 k-пространства навигации. Можно рассматривать и другие линии k-пространства навигации. После (или до) индукции и считывания навигационных эхо-сигналов, множество эхо-сигналов с каждой из множества кодировок фазы и их сохранения в памяти k-пространства для соответствующего среза. Обычно лишь часть линий данных k-пространства каждого среза считываются в каждом TR. Для заполнения k-пространства для каждого среза может потребоваться несколько TR. В конце каждого TR, линии данных kx=0 из всех срезов реконструируются, например, посредством обратного 2D преобразования Фурье для формирования одного проекционного изображения 66 навигации в плоскости, поперечной плоскости изображений 58 среза. Линии данных ky=0 из всех срезов реконструируются во второе навигационное изображение 68, ортогональное как изображениям 58 среза, так и первому навигационному изображению 66. Сравнивая навигационные изображения в одном TR с навигационными изображениями из предыдущего TR, легко определить движение между двумя TR в 3 измерениях. Порядок и состав последовательности 64 эхо-сигналов определяются протоколом формирования изображения. Навигационное изображение 66 представляет собой проекционное изображение, проецируемое в y-направлении, и проекционное изображение 68 представляет собой проекционное изображение, проецируемое в x-направлении.
На фиг. 3 проиллюстрированы пространственные соотношения. 2D срезы 58 изображения задаются в нескольких параллельных плоскостях. Навигационные изображения 66 и 68 ортогональны плоскости изображения и друг другу. Навигационные изображения 66, 68 показаны в k-пространстве, где одно изображение 66 ориентировано в плоскости z-y, и одно изображение 68 ориентировано в плоскости z-x. Срезы 58 изображения лежат в параллельных x-y плоскостях. Ось z может быть параллельна оси 26 субъекта для формирования осевых срезов или других.
В альтернативном варианте осуществления, навигация 54 внедряется в данные формирования изображения. Получаются данные формирования изображения, например, радиальное получение, где возбуждения осуществляются ортогонально, и данные реконструированных изображений действуют как навигационные изображения 66, 68 низкого разрешения для самонавигации.
Фиг. 4 демонстрирует пример навигационных изображений 66, 68, реконструированных после каждого снимка или TR. Изображения получаются в k-пространстве ортогональными срезу изображения. Обратное 1D преобразование Фурье (1D FT) используется для реконструкции линий ky=0 данных k-пространства и линий kx=0 данных k-пространства в пару навигационных изображений 66, 68. Пример демонстрирует сканирование мозга. Верхнее tNav или навигационное изображение 68 демонстрирует сагиттальное изображение мозга, тогда как нижнее tNav или навигационное изображение 66 демонстрирует корональное изображение. Оба изображения ортогональны, в этом примере, поперечным или осевым срезам 58 изображения.
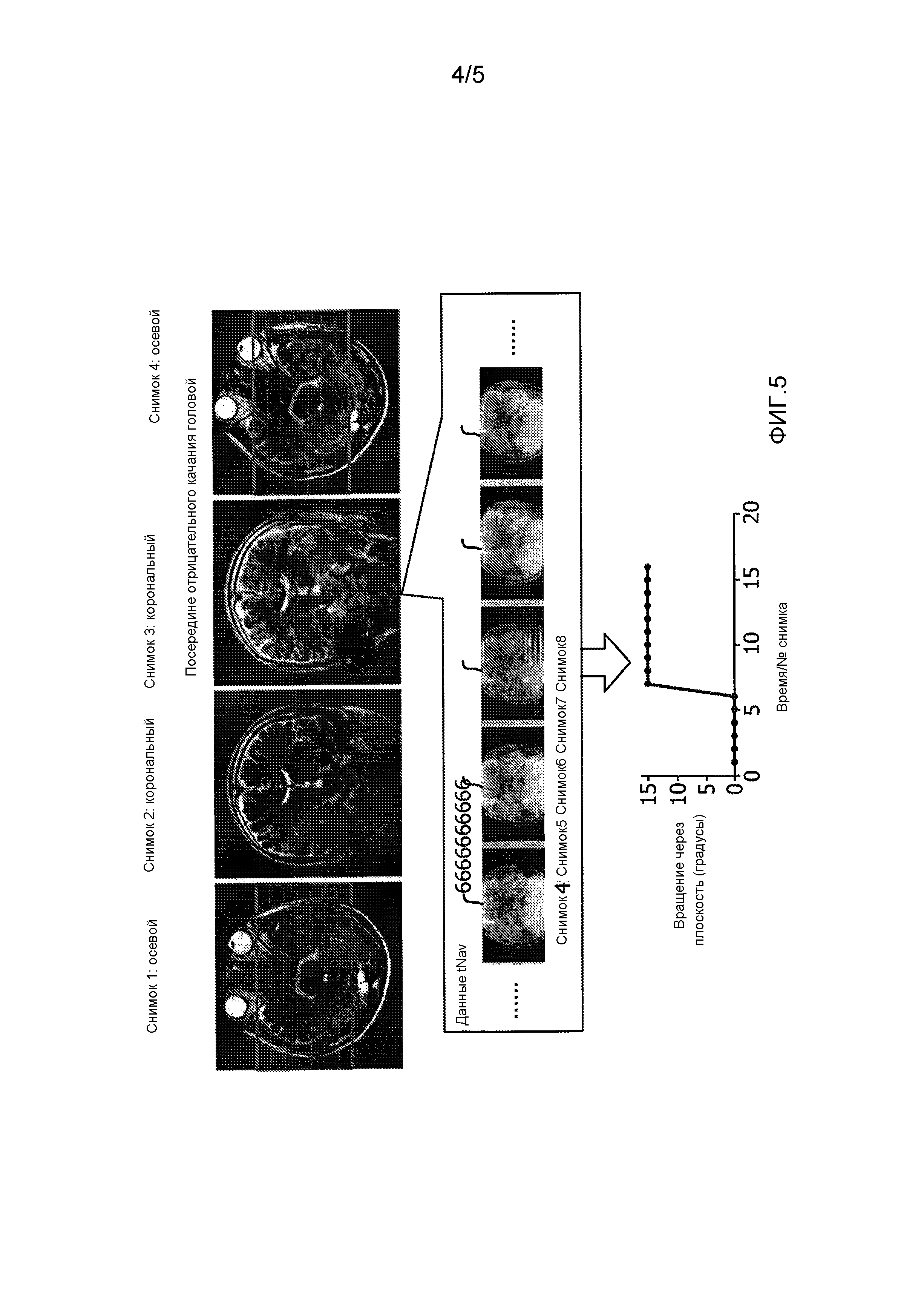
Фиг. 5 демонстрирует пример обнаружения движения с использованием навигационных изображений. Показаны четыре опорных снимка. Первые два снимка являются осевым и корональным снимками. На снимке 3 показан промежуточный момент качания головой субъекта, когда он дает отрицательный ответ, что предусматривает вращательное движение. Снимок 4, по сравнению со снимком 1, демонстрирует различие в движении. Одно из пары tNav или навигационных изображений 66 отображается под опорными изображениями. Сравнивая навигационные изображения из последовательных TR или снимков, легко видеть, что движение произошло между снимками 6 и 7. Плоскость вращения с использованием навигационного изображения 66 измеряется под углом 15 градусов.
Навигационные изображения 66, 68 низкого разрешения сравниваются с использованием корреляции изображений в области для определения параллельного переноса и вращения. Алгоритм корреляции изображений в области вычислительно эффективен и дает быстрый результат. Затем получение данных формирования изображения корректируется в реальном времени параллельным переносом/вращения k-пространства. Данные в следующей последовательности 56 TR получаются с использованием откорректированного k-пространства для непрерывного получения.
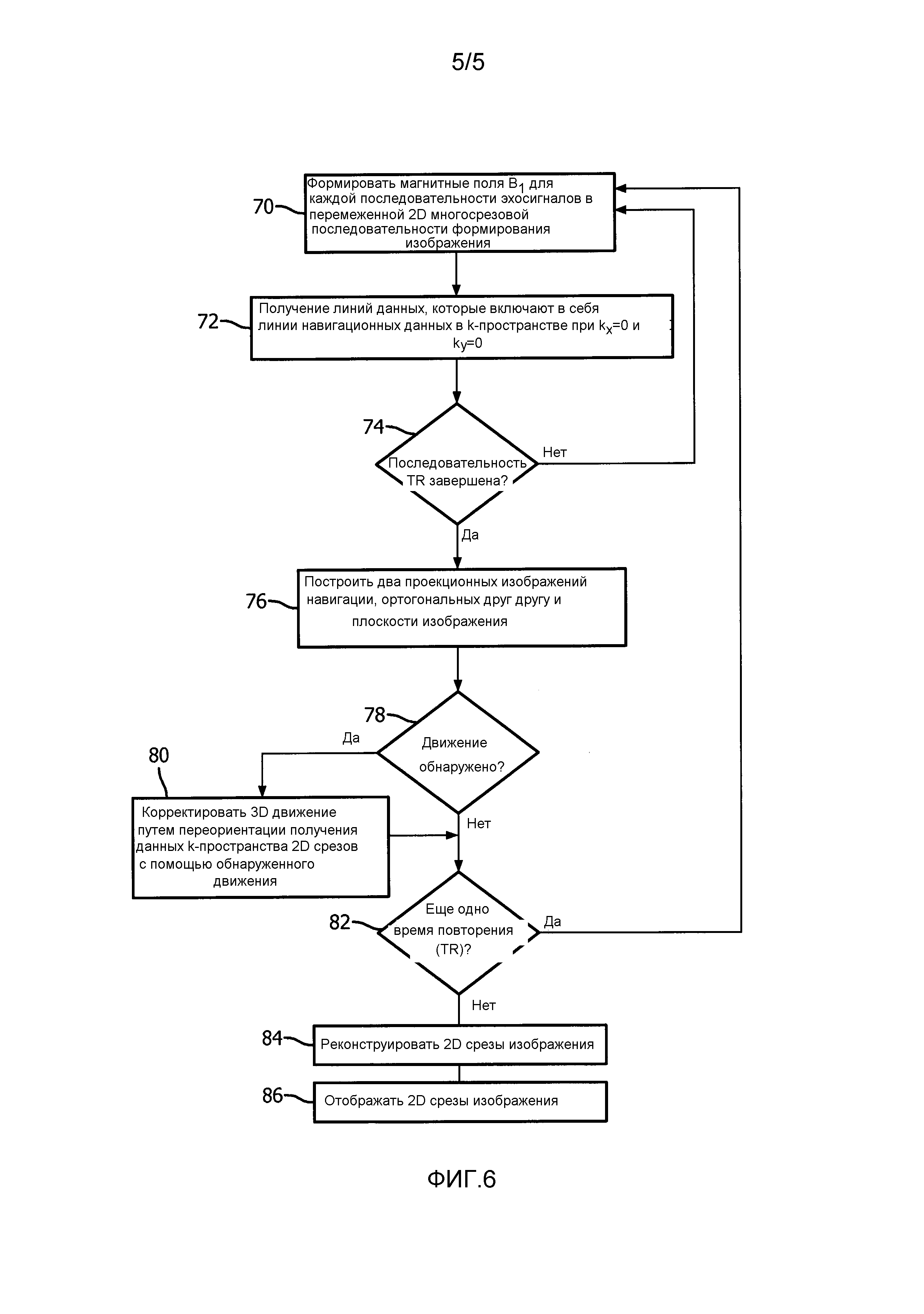
На фиг. 6 представлена блок-схема операций способа формирования изображения методом МР согласно одному варианту осуществления. На этапе 70 импульс 60 возбуждения формируется для индуцирования резонанса в одном из срезов. На этапе 72 получается несколько резонансных сигналов, которые демодулируются для формирования пары линий навигационных данных и ряда линий данных k-пространства в одном срезе. В альтернативном варианте осуществления, получение данных внедряет формирование навигационного изображения через ортогональные поля, например, при радиальном получении. Возбуждение и получение повторяются для каждого среза, пока данные не будут получены из всех срезов. По окончании времени повторения (TR), пара навигационных изображений низкого разрешения реконструируется из линий навигационных данных k-пространства на этапе 76.
На этапе 78 принятия решения последовательные навигационные изображения сравниваются для обнаружения движения. Движение идентифицируется с использованием анатомических структур и различных стандартных методов при формировании изображения. Например, в изображениях идентифицируются одинаковые отличительные признаки, и любое изменение положения в последующих навигационных изображениях указывает параллельный перенос, вращение и т.д. В случае обнаружения движения, на этапе 80, k-пространство переориентируется для последующего получения данных с использованием измеренного движения. Альтернативно, система координат формирования изображения градиентных импульсов переориентируется для сохранения системы формирования изображений постоянной относительно системы координат изображаемой области. Процесс продолжается с переориентированным k-пространством или системой координат. На этапе 82 система определяет, имеется ли другое TR. При необходимости система затем начинает другую последовательность, начинающуюся с формирования полей B1. Если для завершения получения данных диагностического изображения не требуется никаких дополнительных TR, то на этапе 84 реконструируются линии данных k-пространства формирования изображения. Данные можно реконструировать с использованием 3D реконструкции или нескольких 2D реконструкций. Реконструированные срезы изображения или их изображения отображаются и/или сохраняются для дальнейшего просмотра на этапе 86. Реконструированные изображения могут храниться в системе управления хранением, например, системе архивации и передачи изображений (PACS), информационной системе для радиологии (RIS) и пр. Реконструированные срезы изображения могут отображаться на устройстве отображения, например, мониторе, экране компьютера и пр.
Очевидно, что в связи с конкретными иллюстративными вариантами осуществления представленные здесь определенные структурные и/или функциональные признаки описаны как включенные в определенные элементы и/или компоненты. Однако допустимо, чтобы эти признаки могли, с тем же или аналогичным успехом, также быть включены в другие элементы и/или компоненты, когда это целесообразно. Также очевидно, что разные аспекты иллюстративных вариантов осуществления можно выборочно реализовать, при необходимости для получения других альтернативных вариантов осуществления, пригодных для желаемых применений, другие альтернативные варианты осуществления могут таким образом реализовать соответствующие преимущества включенных в них аспектов.
Также очевидно, что функциональные возможности описанных здесь конкретных элементов или компонентов можно надлежащим образом реализовать посредством оборудования, программного обеспечения, программно-аппаратного обеспечения или их комбинации. Дополнительно, очевидно, что определенные элементы, описанные здесь как включенные совместно, могут в соответствующих обстоятельствах быть автономными или иначе разделенными элементами. Аналогично, множество конкретных функций, описанных как осуществляемые одним конкретным элементом, может осуществляться множеством различных элементов, действующих независимо для осуществления отдельных функций, или определенные отдельные функции могут быть разделены и осуществляться множеством различных элементов, действующих совместно. В качестве альтернативы, некоторые элементы или компоненты, иначе описанные и/или показанные здесь как отдельные друг от друга, могут физически или функционально объединяться, когда это целесообразно.
В общем настоящее описание изобретения изложено со ссылкой на предпочтительные варианты осуществления. Очевидно, ознакомившись с настоящим описанием изобретения, другие специалисты могут предложить модификации и изменения. Предполагается, что изобретение следует рассматривать как включающее в себя все подобные модификации и изменения постольку, поскольку они соответствуют объему нижеследующей формулы изобретения или ее эквивалентов. Таким образом, очевидно, что различные раскрытые выше и другие признаки и функции или их альтернативы можно, при желании, объединить во многие другие различные системы или применения, и также что специалисты в данной области техники могут предложить различные не предусмотренные или непредвиденные в настоящее время их альтернативы, модификации, вариации или усовершенствования, которые аналогичным образом подразумеваются охваченными нижеприведенной формулой изобретения.
Световое устройство на основе светодиодов с текстурированными линзами
Бытовое электрическое устройство, содержащее исполнительный механизм
Детектор для подсчета фотонов
Визуализация для навигационного указания
Устройство для ориентирования капсул в машине для получения напитков
4d компьютерная томография с контрастным усилением (кт)
Устройство обнаружения газа
Способ и устройство для приготовления напитка из растворителя и ингредиентов
Способ и устройство для позиционирования доплеровского ультразвукового преобразователя для измерения потока крови и система для измерения потока крови
Устройство и способ приготовления напитка из растворителя и ингредиентов
Световое устройство на основе светодиодов с текстурированными линзами
Бытовое электрическое устройство, содержащее исполнительный механизм
Детектор для подсчета фотонов
Визуализация для навигационного указания
Устройство для ориентирования капсул в машине для получения напитков
4d компьютерная томография с контрастным усилением (кт)
Устройство обнаружения газа
Способ и устройство для приготовления напитка из растворителя и ингредиентов
Способ и устройство для позиционирования доплеровского ультразвукового преобразователя для измерения потока крови и система для измерения потока крови
Устройство и способ приготовления напитка из растворителя и ингредиентов

