Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ДИНАМИЧЕСКОЙ ЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к области автоматизированного управления, в частности к способу и системе для идентификации объектов управления при неизвестных ограниченных внешних возмущениях, действующих на объект управления.
УРОВЕНЬ ТЕХНИКИ
Известны способы идентификации объектов управления (см. патент RU 2306592, кл. G05B 23/00, 2006.01, патент RU 2079870, кл. G05B 23/02, 1997 и патент RU 2146063, кл. G05B 17/02, 2000, статья А.Г. Александров "Конечно-частотная идентификация: определение границ испытательных частот", ж. "Автоматика и телемеханика РАН, №11, 2001 [1]).
Способы, предложенные в патенте RU 2079870, кл. G05B 23/02, 1997 и патенте RU 2146063, кл. G05B 17/02, 2000, не достигают цели, когда внешние возмущения неизвестны.
Наиболее близкими к предлагаемому является способ, предложенный в патенте RU 2306592, кл. G05B 23/00, 2006, и его аналог для непрерывных объектов, предложенный в статье [1].
Недостаток этих способов - это длительность идентификации, которая может быть велика, что приводит к большим ошибкам при ограниченном времени идентификации в случае применения способа в системах управления в реальном времени.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленного изобретения является создание способа и реализующей его системы для идентификации объектов управления при неизвестных ограниченных внешних возмущениях, действующих на объект управления.
Техническим результатом является сокращение времени идентификации объекта управления.
Заявленный технический результат достигается за счет способа динамической частотной идентификации объектов управления, включающего выполнение следующих этапов:
A) подачу испытательного сигнала на вход объекта управления или добавление испытательного сигнала к уставке замкнутой системы управления;
Б) формирование в памяти вычислительного устройства массива измеренных значений выходного сигнала объекта управления и значений сигнала управления с испытательным сигналом в течение времени фильтрации τ, учитывая, что измерения и запись в память этих значений производится с шагом дискретизации h секунд и, соответственно, τ=ν⋅h, где ν - размер этих массивов;
B) вычисление комплексных интегралов на интервале времени фильтрации измеренных значений выходного сигнала объекта управления и значений сигнала управления, умноженных на комплексную экспоненту  , где (t-tF) - текущее время измерения от начала фильтрации, ωk - частоты, содержащиеся в испытательном сигнале,
, где (t-tF) - текущее время измерения от начала фильтрации, ωk - частоты, содержащиеся в испытательном сигнале,  , где γ - заданное число, определяемое порядком объекта управления;
, где γ - заданное число, определяемое порядком объекта управления;
Г) формирование и решение системы линейных алгебраических уравнений, результатом решения которой являются идентифицированные оценки коэффициентов объекта управления;
Д) проверку выполнения условия сходимости идентифицированных оценок коэффициентов объекта управления, при которой если условие сходимости идентифицированных оценок коэффициентов объекта управления не выполнено, то происходит увеличение времени фильтрации τ на приращение Δ и возврат к шагу Б), в противном случае, считается, что идентификация объекта управления выполнена,
причем начальное значение времени фильтрации τ0 выбирается из условия τ0 больше или равно ν0⋅h, где h - шаг дискретизации по времени измерения и записи в память вычислительного устройства значений выходного сигнала объекта управления и значений сигнала управления, где ν0 - начальное число измерений, которое должно удовлетворять условию ν0>2γ, где γ - заданное количество частот, содержащихся в испытательном сигнале, а значение приращений Δ при итерациях выбирается из условия Δ больше или равно h.
В другом предпочтительном варианте осуществления заявленного изобретения заявлена система динамической частотной идентификации объектов управления, содержащая объединенные шиной данных: по меньшей мере, один процессор, блок памяти, средство хранения данных, интерфейсы ввода/вывода, причем блок памяти содержит машиночитаемые команды, которые при их исполнении, по меньшей мере, одним процессором выполняют этапы, на которых осуществляют:
А) подачу испытательного сигнала на вход объекта управления или добавление испытательного сигнала к уставке замкнутой системы управления;
Б) формирование в памяти вычислительного устройства массива измеренных значений выходного сигнала объекта управления и значений сигнала управления с испытательным сигналом в течение времени фильтрации τ, учитывая, что измерения и запись в память этих значений производится с шагом дискретизации h секунд и, соответственно, τ=ν⋅h, где ν - размер этих массивов;
В) вычисление комплексных интегралов на интервале времени фильтрации измеренных значений выходного сигнала объекта управления и значений сигнала управления, умноженных на комплексную экспоненту , где (t-tF) - текущее время измерения от начала фильтрации, ωk - частоты, содержащиеся в испытательном сигнале,  , где γ - заданное число, определяемое порядком объекта управления;
, где γ - заданное число, определяемое порядком объекта управления;
Г) формирование и решение системы линейных алгебраических уравнений, результатом решения которой являются идентифицированные оценки коэффициентов объекта управления;
Д) проверку выполнения условия сходимости идентифицированных оценок коэффициентов объекта управления, при которой если условие сходимости идентифицированных оценок коэффициентов объекта управления не выполнено, то происходит увеличение времени фильтрации τ на приращение Δ и возврат к шагу Б),
причем, начальное значение времени фильтрации τ0 выбирается из условия τ0 больше или равно ν0⋅h, где h - шаг дискретизации по времени измерения и записи в память вычислительного устройства значений выходного сигнала объекта управления и значений сигнала управления, где ν0 - начальное число измерений, которое должно удовлетворять условию ν0>2γ, где γ - заданное количество частот, содержащихся в испытательном сигнале, а значение приращений Δ при итерациях выбирается из условия Δ больше или равно h.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
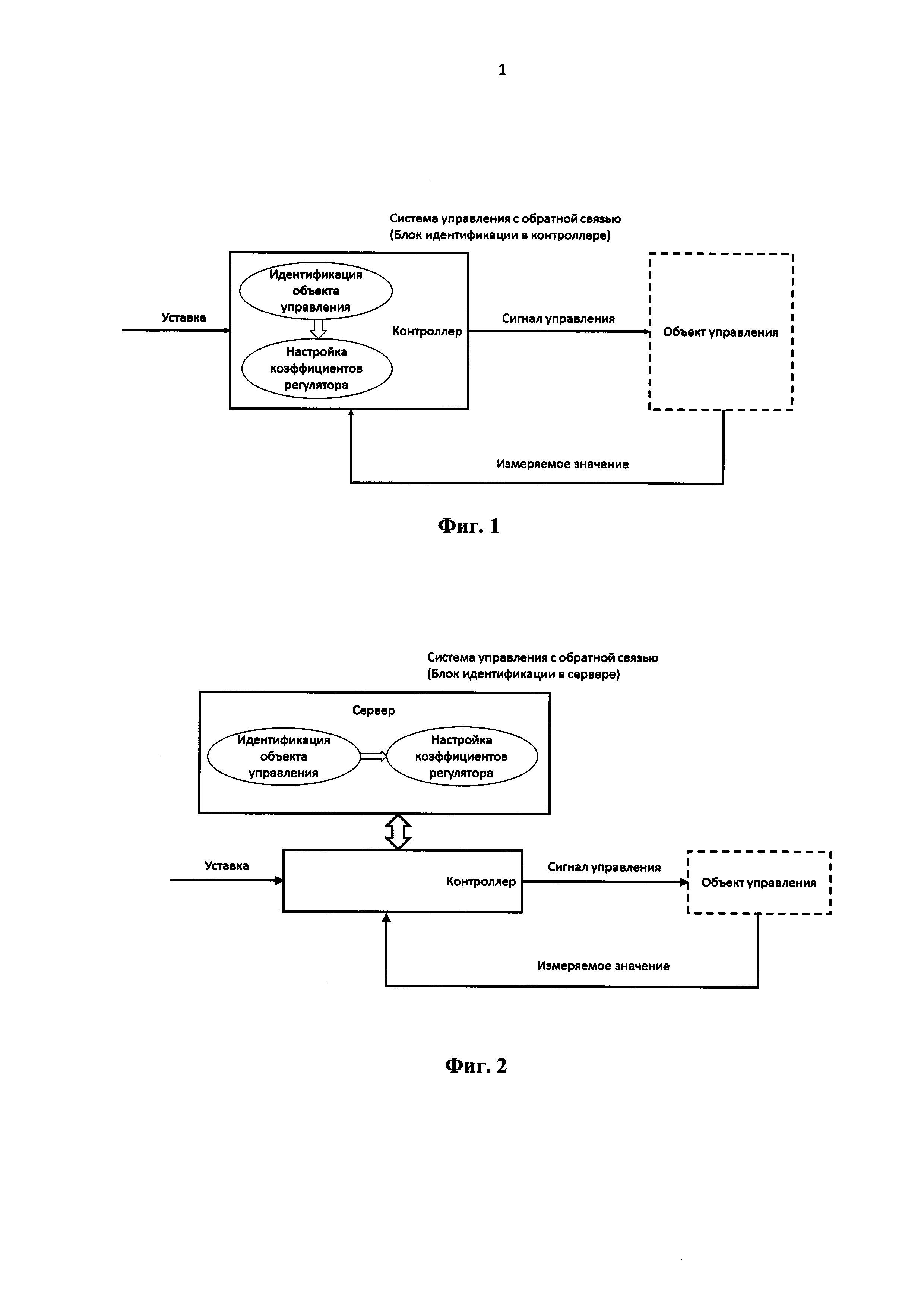
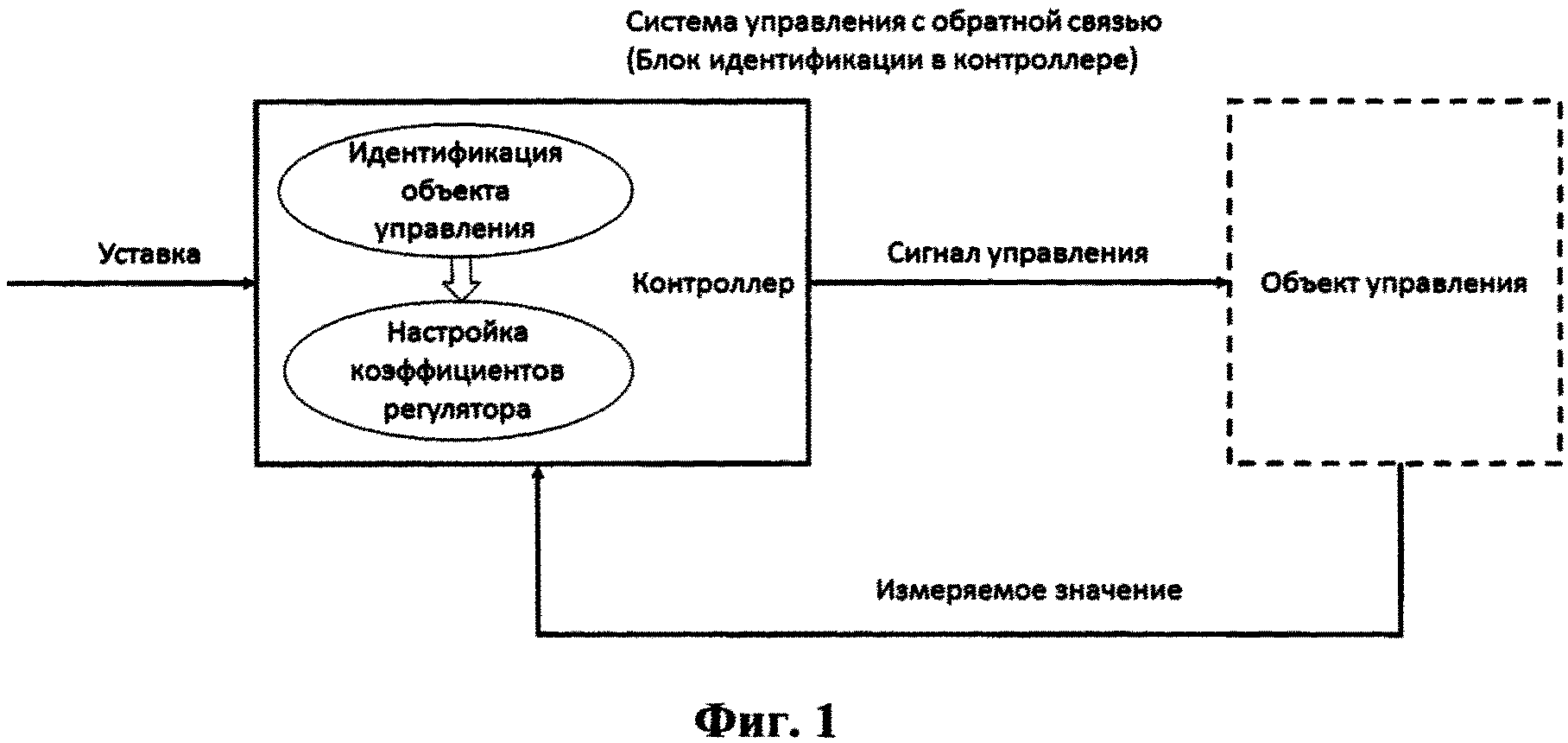
Фиг. 1 иллюстрируют пример системы управления с обратной связью в случае, когда блок идентификации расположен в контроллере.
Фиг. 2 иллюстрируют пример системы управления с обратной связью в случае, когда блок идентификации расположен на сервере.
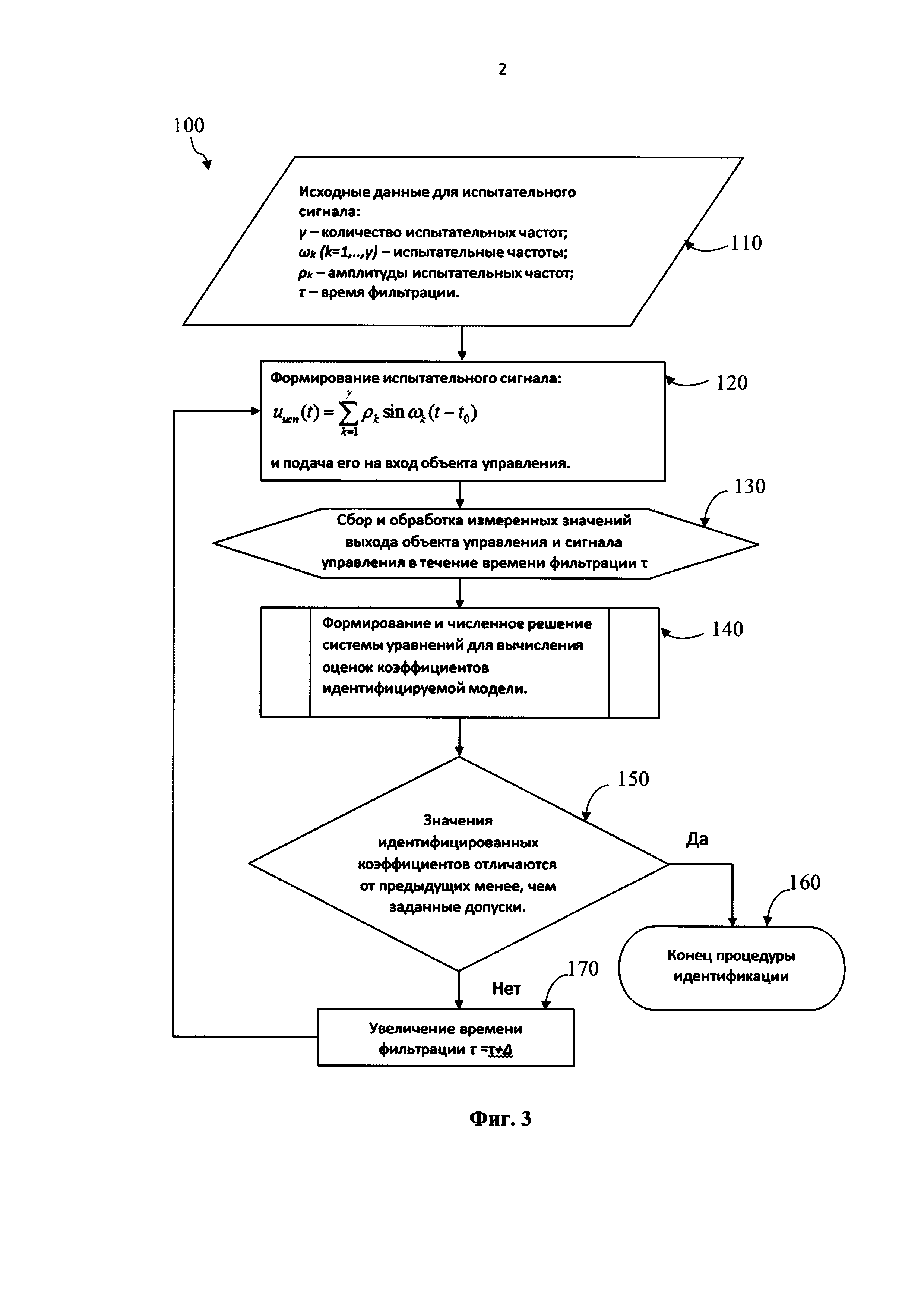
Фиг. 3 иллюстрируют блок-схему выполнения этапов заявленного способа.
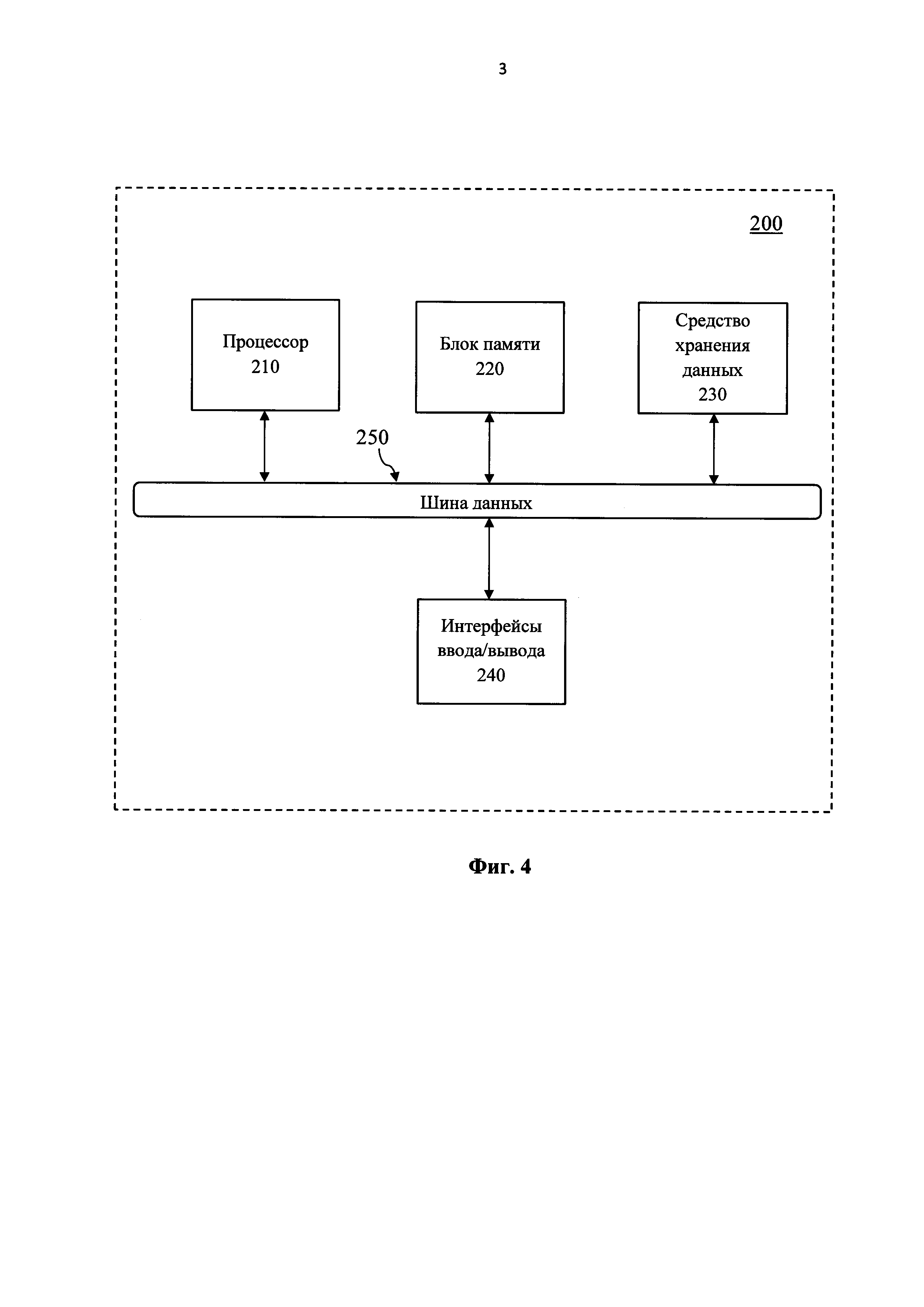
Фиг. 4 иллюстрирует систему для частотной идентификации, реализующую выполнение заявленного способа.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Объект управления - это техническое устройство или технологический процесс, у которого есть измеряемый выход y(t) и вход управления, на который подается сигнал u(t), формируемый регулятором. Регулятор - это программный модуль для промышленного контроллера. Контроллер - это вычислительное устройство, имеющее интерфейсы для получения данных измерений с датчиков и передачи управляющих значений на исполнительные устройства объекта управления. На Фиг. 1 показана схема их соединения.
Программный модуль идентификации, результаты работы которого могут быть использованы для расчета коэффициентов регулятора, разрабатывается для выполнения в контроллере, как показано на Фиг. 1, или для выполнения на сервере, как показано на Фиг. 2.
Предполагаем, что линейное дифференциальное уравнение, связывающее переменные u(t) и y(t), с достаточной точностью описывает динамику объекта управления:

Здесь y - измеряемый выход объекта,  - его первая производная, y(n) - производная порядка n, число n считается заданным, u - сигнал управления,
- его первая производная, y(n) - производная порядка n, число n считается заданным, u - сигнал управления,  - его первая производная, u(m) - производная порядка m, m<n,
- его первая производная, u(m) - производная порядка m, m<n,  - внешнее возмущение (
- внешнее возмущение ( ,
,  - число), аi, bl (
- число), аi, bl ( ,
,  ) - неизвестные коэффициенты объекта управления.
) - неизвестные коэффициенты объекта управления.
Задача идентификации - найти значения неизвестных коэффициентов объекта управления.
Эта задача решается на основе измеренных значений выхода объекта управления при подаче испытательного сигнала на вход объекта управления. Блок-схема алгоритма динамической частотной идентификации приведена на Фиг. 3.
Испытательный сигнал представляет собой сумму испытательных частот:

где γ - целое число, удовлетворяющее неравенству 2γ>n+m, амплитуды ρk и частоты ωk для  - заданы (шаг 110, Фиг. 3). Также необходимо задать начальное время фильтрации τ, в течение которого будет подаваться испытательный сигнал и будут запоминаться измеренные значения выходного сигнала объекта управления и значения сигнала управления.
- заданы (шаг 110, Фиг. 3). Также необходимо задать начальное время фильтрации τ, в течение которого будет подаваться испытательный сигнал и будут запоминаться измеренные значения выходного сигнала объекта управления и значения сигнала управления.
Если объект устойчивый, то можно провести испытания в разомкнутой системе. Тогда сигнал управления - это испытательный сигнал (2), к которому при необходимости добавляется константа u0, соответствующая рабочему режиму объекта управления:
u(t)=uисп(t)+u0.
Этот сигнал управления подается на вход объекта управления (шаг 120, Фиг. 3).
В замкнутой системе испытательный сигнал (2) добавляется к уставке ysp, задающей требуемое значение выхода объекта управления:
ysp_исп(t)=ysp+uисп(t).
В течение заданного времени фильтрации от t=tF до t=tF+τ, где tF≥t0 - время начала фильтрации, τ - время фильтрации, формируем массивы значений u(t) и y(t) в памяти вычислительного устройства, учитывая, что измерения и запись в память производятся с шагом дискретизации h секунд (130, Фиг. 3).
Умножим уравнение (1) на  для каждой частоты испытательного сигнала ωk
для каждой частоты испытательного сигнала ωk  и получим систему комплексных уравнений. Проинтегрировав их на интервале от t=tF до t=tF+τ, получим систему уравнений:
и получим систему комплексных уравнений. Проинтегрировав их на интервале от t=tF до t=tF+τ, получим систему уравнений:
Надо учесть, что если внешнее возмущение  неизвестно и не измеряется, то слагаемое, его содержащее, мы должны исключить из уравнений (3). В этом случае решением системы (3) будут не точные значения коэффициентов ai, bl, а их оценки. Точность этих оценок зависит от внешнего возмущения
неизвестно и не измеряется, то слагаемое, его содержащее, мы должны исключить из уравнений (3). В этом случае решением системы (3) будут не точные значения коэффициентов ai, bl, а их оценки. Точность этих оценок зависит от внешнего возмущения  и времени фильтрации τ.
и времени фильтрации τ.
Проведя интегрирование уравнений (3) по частям, получим систему уравнений:

где введены следующие обозначения:  ,
,  ,
,




Решая систему уравнений (4), получим оценки коэффициентов объекта управления  ,
,  (
( ,
,  ) (шаг 140, Фиг. 3).
) (шаг 140, Фиг. 3).
Сформулируем условие сходимости оценок коэффициентов объекта управления, например, вида

где q - заданное количество оценок,  ,
,  - заданные допустимые ошибки идентификации,
- заданные допустимые ошибки идентификации,  ,
,  - значения оценок коэффициентов объекта управления на p-том шаге идентификации, то есть когда время фильтрации равно τ=τ0+рΔ. Проверяем выполнение условия сходимости (шаг 150, Фиг. 3). Для первых шагов, пока p<q, считаем это условие сходимости невыполненным.
- значения оценок коэффициентов объекта управления на p-том шаге идентификации, то есть когда время фильтрации равно τ=τ0+рΔ. Проверяем выполнение условия сходимости (шаг 150, Фиг. 3). Для первых шагов, пока p<q, считаем это условие сходимости невыполненным.
Если условие сходимости не выполнено, то увеличиваем время фильтрации τ на Δ (шаг 170, Фиг. 3) и соответственно p увеличивается на 1.
Итерации получения оценок коэффициентов объекта управления  ,
,  проводим до выполнения условия сходимости, после чего алгоритм выполнен (шаг 160, Фиг. 3) и идентификация объекта управления произведена.
проводим до выполнения условия сходимости, после чего алгоритм выполнен (шаг 160, Фиг. 3) и идентификация объекта управления произведена.
В работе [1] также рассмотрена идентификация с использованием испытательного сигнала вида (2) и предложен алгоритм, в котором вычисляются интегралы (7) и (8), затем вычисляются оценки частотных параметров αk, βk,  :
:

затем формируется и решается система линейных алгебраических уравнений:

При этом требуется, чтобы время фильтрации τ было кратно периоду минимальной частоты испытательного сигнала. То есть минимально допустимые начальное значение τ0 и дальнейшие его приращения Δ должны быть равны  , где ω1 - минимальная частота испытательного сигнала.
, где ω1 - минимальная частота испытательного сигнала.
В предлагаемом алгоритме динамической частотной идентификации это требование отсутствует. Начальное значение времени фильтрации τ0 можно выбирать любым не менее ν0⋅h, где h - шаг дискретизации измерения и запись в память значений выходного сигнала объекта управления и значений сигнала управления, ν0 - начальное число измерений, которое должно удовлетворять условию ν0>2γ, где γ - заданное количество частот, содержащихся в испытательном сигнале. Значение приращений Δ при итерациях можно выбирать любым не менее одного h - шага дискретизации измерения и запись в память значений выходного сигнала объекта управления и значений сигнала управления.
Таким образом, время фильтрации для получения оценок коэффициентов объекта управления многократно сокращается и общее время длительности идентификации может быть существенно меньше, чем при использовании алгоритма из работы [1].
На Фиг. 4 представлена общая схема системы 200 для выполнения заявленного способа 100 частотной идентификации.
В общем случае система 200 представляет собой ЭВМ, например IBM PC, промышленный контроллер, ПЛК (программируемый логический контроллер) и т.п., и содержит такие основные компоненты, как один или более процессоров 210, блок памяти 220 (RAM, ROM, NAND Flash и т.п.), средство хранения данных 230 (HDD, SSD, TF Card, оптический диск и т.п.) и интерфейсы ввода/вывода (USB, Ethernet и др.).
Блок памяти 220 содержит инструкции, которые при их исполнении одним или более процессором выполняют этапы заявленного способа частотной идентификации 100, которые были представлены выше.

Самонастраивающийся пид-регулятор
Частотная адаптивная система управления

