МЕХАНИЧЕСКИЙ ПРИВОД
Вид РИД
Изобретение
Область техники
Изобретение относится к механическим приводам, в частности к малогабаритным механическим приводам, часто применяемым в микронасосах, например, для систем доставки лекарственных веществ.
Уровень техники
Существуют различные механические приводы, обеспечивающие необходимую производительность, в устройствах, предназначенных для подачи жидкости. Известные механические приводы включают в себя устройства, работающие на основе термопневматических (US 4265600 и US 6520753), электростатических (US 6168395 и US 5362213), пьезоэлектрических (US 4596575 и US 6827559), термогидравлических (GB 2443261), биметаллических (US 5611676) элементов, а также использующие шаговые двигатели (ЕР 2072072) и магнитные (US 3819305 и US 7922462) механических приводов.
Существуют некоторые сложности при монтировании механических приводов указанных типов в конструкцию микронасосов. Некоторые из этих механических приводов являются достаточно сложными по конструкции, что затрудняет проектирование изделия для массового производства, процесс изготовления которого требует создание экономически выгодного изделия. Также ограничены варианты конструкторских решений по установке в микронасосы механических приводов за счет их сложности. Другие ограничения заключаются в том, что компоненты, необходимые для изготовления ряда описанных выше механических устройств, приводят к усложнению производства и повышению цены изделия. Еще одно ограничение состоит в том, что материалы, необходимые для встраивания, по меньшей мере, некоторых, вышеупомянутых механических приводов в микронасос, уменьшают число возможных вариантов применения изделия. В качестве примера можно указать то, что некоторые материалы не совместимы с перекачиваемой жидкостью, поскольку она разрушает дорогостоящие компоненты изделия. Это может касаться дорогостоящих компонентов, таких как биологически активные материалы. В других случаях некоторые принципы работы механических приводов не обеспечивают точность, требуемую для микронасосов и необходимую для доставки лекарственных и других важных компонентов. Другое ограничение заключается в том, что вышеуказанные принципы работы механических приводов не обеспечивают возможность многократного срабатывания, требуемого для некоторых систем доставки лекарств. В качестве примера можно указать изделия, часто подлежащие замене и предназначенные для краткосрочного использования, требующие наличие приводов, работающих на принципах, обеспечивающих возможность повторного использования в большом числе аналогичных устройств. Еще одним ограничением является то, что некоторые из вышеуказанных принципов работы механических приводов не обеспечивают достаточную мощность для доставки лекарственных средств при малых размерах привода.
В качестве материала, подходящего для изготовления механического привода вышеописанного типа, был выбран сплав с эффектом памяти формы, и в соответствии с этим были описаны несколько вариантов выполнения устройств на его основе. Механические приводы на основе сплава с эффектом памяти формы могут применяться в микронасосах за счет создания ими большого усилия на единицу веса, простоты конструкции, компактности и отсутствия шума и загрязнений при работе. Механические приводы на основе сплава с эффектом памяти формы также обеспечивают эффективные решения для конструкций, предназначенных для кратковременной эксплуатации, простых в производстве одноразовых изделий, которые изготавливаются в очень больших количествах по экономически выгодной цене.
Однако механические приводы на основе сплава с эффектом памяти формы обладают недостатками, которые ограничивают их применение в системах, требующих высокой точности.
Одним из недостатков устройств с механическими приводами на основе сплава с эффектом памяти формы является то, что они обладают значительным гистерезисом при деформации, и их фазовый переход зависит от температуры, напряжения, направления перемещения и многих других факторов (J.D. Harrison, "Measurable Change Concomitant with SME Transformation," Engineering Aspects of SMAs, eds. Duering et al., Butterworth, pp 106-209, 1990).
Для компенсации немеханической нелинейности сплавов с эффектом памяти формы применялись подходы с использованием нелинейного управления. Эти подходы включали различные методы управления механическим перемещением сплава с эффектом памяти формы: робастный контроллер на основе нейронных сетей и режима скольжения (Song, "Precision tracking control of shape memory alloy actuators using neural networks and a sliding-mode based robust controller," Smart Mater. Struct. 12, pp. 223-231, 2003), на основе нейронных сетей с нечеткой логикой (Kumagai, "Neuro-fuzzy model based feedback controller for shape memory alloy actuators," Proceedings of SPIE, v 3984, pp. 291-9, 2000), диссипации (Gorbet, "Dissipativity approach to stability of a shape memory alloy position control system," IEEE Transactions on Control Systems Technology, v 6, n 4, pp. 554-562, July 1998), управления с переменной структурой (Grant, "Variable structure control of shape memory alloy actuators," IEEE Control Systems Magazine, v 17, n 3, pp. 80-88, June 1997), и широтно-импульсной модуляцией энергии привода (NMa and G Song, "Control of shape memory alloy actuator using pulse width modulation," Smart Mater. Struct. 12, pp. 712-719, 2003). Несмотря на применение этих зачастую сложных подходов к управлению сплавом с эффектом памяти формы, управлять им по-прежнему трудно.
Также было предложено несколько подходов по обеспечению точности перемещения при помощи механических приводов на основе сплава с эффектом памяти формы за счет механического ограничения диапазона перемещения, которое он может осуществлять.
В документе ЕР 2290238 А1 описано устройство, которое ограничивает диапазон перемещения плунжера устройства доставки жидкости за счет наличия механических упоров как в начале, так и в конце хода плунжера.
В документе US 7232423 представлено устройство, которое также использует механические упоры для точного определения диапазона перемещения, обеспечиваемого механическим приводом на основе сплава с эффектом памяти формы. Ограничением применения данных устройств является то, что эти механические упоры создают деформацию сплава с эффектом памяти формы и ограничивают характеристики привода, а также могут привести к выходу его из строя.
В документе US 8047812 описано устройство, которое предназначено для снижения эффекта нежелательных деформаций сплава с эффектом памяти формы за счет введения связанного с этим элементом второго поршня, который перемещается для компенсации изменений элемента с памятью формы и снижения напряжения в насосной системе. Введение второго поршня повышает сложность устройства, что затрудняет его изготовление и снижает экономическую эффективность производства.
В документе US 8029245 описано устройство, в котором для обеспечения требуемой точности производится контроль положения поршня в насосной системе с последующей модуляцией энергии, подводимой к сплаву с эффектом памяти формы. Требование контроля положения плунжера в этом устройстве приводит к необходимости использования сложного датчика и систем управления, которые усложняют конструкцию и работу устройства. Эти дополнительные компоненты также повышают стоимость и сложность производства устройства.
В документе US 6656158 описано устройство дозирования жидкости, которое использует сплава с эффектом памяти формы для перемещения кулачка, взаимодействующего с зубчатой передачей, связанной с дозирующей частью. При каждом срабатывании сплава с эффектом памяти формы кулачок перемещается, воздействуя на зубчатое колесо и переводя его из первого положения во второе. Зубчатое колесо не возвращается в первое положение. Устройство позволяет устранить недостаток точности при использовании сплава с эффектом памяти формы за счет его применения для перемещения точно выполненной зубчатой передачи.
Аналогичное устройство описано в документе US 6375638. В этом устройстве сплава с эффектом памяти формы используется для перемещения детали, которая затем отклоняет вторую деталь из первого положения во второе. Перемещаемая деталь может совершать либо линейное, либо угловое перемещение. Важно отметить, что данная деталь не возвращается в первое положение, а перемещается на один шаг вдоль траектории хода при каждом срабатывании сплава с эффектом памяти формы. И в документе US 6656158, и в документе US 6375638 описаны устройства, сложность которых затрудняет производственный процесс и снижает его рентабельность.
Существует потребность в разработке усовершенствованного механического привода на основе сплава с эффектом памяти формы, который обеспечивал бы требуемую точность, надежность и простоту производства, рентабельность и имел широкий масштаб применения для приводов возвратно-поступательного движения поршня микронасоса.
Раскрытие изобретения
Согласно изобретению механический привод содержит рычаг, выполненный с возможностью вращения относительно неподвижной точки; клинообразный элемент, находящийся в постоянном контакте с рычагом в точке, расположенной на расстоянии от неподвижной точки вращения, для отклонения рычага относительно этой точки; сплав с эффектом памяти формы, взаимодействующий с клинообразным элементом, обеспечивая его перемещение для отклонения рычага, причем сплав с эффектом памяти формы в исходном положении находится в предварительно напряженном состоянии; и наконечник поршня, постоянно контактирующий с рычагом в точке, расположенной на рычаге на некотором расстоянии от неподвижной точки вращения этого рычага. Другие варианты выполнения указанного механического привода определены в пп. 2-27 формулы изобретения. Механический привод может быть изготовлен малогабаритным.
Изобретение относится также к механическому приводу, содержащему поршень, клинообразный элемент, взаимодействующий с поршнем для его отклонения, и сплав с эффектом памяти формы, взаимодействующий с клинообразным элементом с возможностью его перемещения таким образом, чтобы он отклонял поршень, причем в исходном положении сплав с эффектом памяти формы находится в предварительно напряженном состоянии. Другие варианты выполнения указанного механического привода определены в пп. 29-46 формулы изобретения. Механический привод может быть изготовлен малогабаритным.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов сплав с эффектом памяти формы выполнен с возможностью линейного перемещения клинообразного элемента из первого положения во второе.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов поршень и клинообразный элемент установлены таким образом, что когда клинообразный элемент перемещается из первого положения во второе, поршень линейно перемещается из первого положения во второе.
Еще в одном варианте осуществления изобретения в любом из описанных выше приводов направление перемещения поршня перпендикулярно направлению перемещения клинообразного элемента. Конструкция механического привода обеспечивает точное перемещение поршня микронасоса.
Еще в одном варианте осуществления изобретения в любом из описанных выше приводов клинообразный элемент имеет наклонную поверхность, которая контактирует с поршнем с возможностью его перемещения при линейном движении клинообразного элемента. Наклонная поверхность клинообразного элемента образует угол с линейным направлением перемещения этого клинообразного элемента. Указанный угол может быть оптимизирован для обеспечения наилучшего перемещения поршня. Специалистам в данной области техники понятно, что угол наклона поверхности и расстояние, которое проходит клинообразный элемент в прямолинейном направлении, определяют расстояние, на которое перемещается поршень из первого положения во второе. Угол между наклонной поверхностью клинообразного элемента и прямолинейным направлением его перемещения, а также длина наклонной поверхности могут определяться физическими размерами клинообразного элемента. Преимущество данного варианта осуществления изобретения заключается в том, что форма клинообразного элемента определяет величину и точность смещения поршня. Наклонная поверхность клинообразного элемента может быть дополнительно изменена путем включения в нее поверхностей, которые являются по существу плоскими в направлении перемещения клинообразного элемента. Одна такая поверхность может быть добавлена к передней кромке клинообразного элемента непосредственно перед наклонной поверхностью. Другая плоская поверхность может быть добавлена непосредственно после наклонной поверхности. Две плоские поверхности и наклонная поверхность могут быть расположены таким образом, чтобы они образовывали непрерывную поверхность. Клинообразный элемент может быть расположен таким образом, что когда он находится в первом положении, один конец поршня контактирует с первой плоской поверхностью. Когда клинообразный элемент смещается вдоль прямолинейного направления перемещения, край поршня перемещается вдоль наклонной поверхности и смещается из первого положения во второе. Величина, на которую смещается поршень, может определяться углом и длиной наклонной поверхности. После достижения поршнем конца второй плоской поверхности его дальнейшее перемещение невозможно. Преимущество настоящего изобретения состоит в том, что смещение поршня клинообразным элементом не определяется величиной хода клинообразного элемента вдоль прямолинейного направления перемещения, пока первое положение клинообразного элемента позволяет поршню контактировать с по меньшей мере одним участком первой плоской поверхности, а второе положение клинообразного элемента позволяет поршню контактировать с по меньшей мере одним участком второй плоской поверхности. Специалистам в данной области техники понятно, что форма клинообразного элемента может быть включена в другие варианты осуществления механического привода согласно изобретению. Вышеуказанная конфигурация разъясняется для механического привода, в котором поршень контактирует с клинообразным элементом. Очевидно, что она может аналогичным образом применяться в механическом приводе, когда с клинообразным элементом контактирует рычаг.
Еще в одном варианте осуществления изобретения в любом из описанных выше приводов рычаг содержит первый конец, который образует неподвижную точку вращения, и подвижный конец, который перемещается вокруг неподвижной точки вращения. Подвижный конец рычага установлен таким образом, что он находится в постоянном контакте с клинообразным элементом, и клинообразный элемент может скользить относительно подвижного конца рычага. Таким образом, на рычаге имеется точка постоянного контакта с поршнем, расположенная между неподвижной точкой вращения рычага и точкой контакта рычага с клинообразным элементом. Поршень установлен таким образом, что он может прямолинейно перемещаться в направлении, которое максимально близко к касательной к траектории углового перемещения рычага. Когда клинообразный элемент перемещается из первого положения во второе, происходит отклонение подвижного конца рычага из первого положения во второе. Когда рычаг отклоняется клинообразным элементом во второе положение, рычаг отклоняет поршень из первого положения во второе. После охлаждения сплава с эффектом памяти формы возвратная пружина может оттягивать клинообразный элемент из второго положения в первое, рычаг поворачивается из второго положения в первое, и поршень перемешается из второго положения в первое. Механический привод обеспечивает оптимальную точность перемещения поршня из первого положения во второе путем точного позиционирования клинообразного элемента и также за счет оптимального положения поршня вдоль рычага относительно неподвижной точки вращения рычага и точки контакта между рычагом и клинообразным элементом. Положение рычага, которое определяет точку контакта с поршнем относительно положения неподвижной точки вращения и точки контакта между рычагом и клинообразным элементом, может быть оптимизировано для обеспечения наилучшего перемещения поршня и требуемой точности.
Современные технологии производства, такие как литье под давлением полимерных деталей, позволяют изготавливать полимерные детали с допусками на изготовление около +/-20 мкм. В некоторых случаях возможно получение допусков ±10 мкм. Таким образом, при помощи технологии литья под давлением можно изготовить необходимый клинообразный элемент согласно изобретению с этими допусками. В некоторых случаях за счет этого обеспечивается достаточная точность перемещения поршня, пригодная для изготовления микронасосов, которые могут применяться для подачи и точного дозировании лекарств.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов клинообразный элемент может иметь две наклонные поверхности. Одна поверхность взаимодействует с поршнем или рычагом, а другая - с наклонной поверхностью в фиксированном положении. Две наклонные поверхности клинообразного элемента находятся одна напротив другой. Специалистам в данной области техники понятно, что такое расположение наклонных поверхностей обеспечивает уменьшение наклона поверхностей при сохранении отклонения, вызываемого перемещением клинообразного элемента.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов клинообразный элемент расположен таким образом, что он не может поворачиваться вокруг оси перемещения или перпендикулярной ей оси. Такое расположение повышает эффективность отклонения, вызываемого клинообразным элементом при его перемещении между первым и вторым положениями.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов для повешения точности микронасоса положение поршня может задаваться точкой его контакта с рычагом по длине этого рычага. Расположение поршня на рычаге в точке между точкой контакта между клинообразным элементом и рычагом и фиксированной точкой вращения рычага позволяет оптимизировать точность перемещения поршня.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов поршень расположен таким образом, что направление его перемещения максимально ограничено. Такое расположение повышает эффективность перемещения, вызываемого клинообразным элементом или рычагом, воздействующим на поршень.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов рычаг выполнен достаточно жестким для исключения его изгиба при работе малогабаритного механического привода.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов для перемещения рычага из второго положения в первое в привод встроена пружина. Пружина может представлять собой силиконовый элемент, один конец которого соединен с рычагом, а другой - с неподвижной точкой.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов для перемещения поршня из второго положения в первое,в привод встроена пружина. Пружина может представлять собой силиконовый элемент, один конец которого соединен с поршнем, а другой - с неподвижной точкой.
В еще одном варианте осуществления изобретения любой из описанных выше приводов используется для возвратно-поступательно перемещения поршня микронасоса для введения жидких лекарств. Насос может содержать насосную камеру с входом и выходом, объем которой изменяется за счет действия механического привода. Подобный насос может быть частью устройства подачи лекарственных препаратов, содержащего резервуар с препаратом, в котором поддерживается избыточное давление, так что когда насосная камера заполняется жидким лекарственным препаратом, избыточное давление резервуара препарата способствует заполнению насосной камеры. Для предотвращения несанкционированной доставки жидкого лекарственного препарата из резервуара с препаратом на входе и на выходе насосной камеры имеются клапаны. Эти клапаны могут иметь такую конструкцию, при которой входной клапан обеспечивает поступление жидкости в насосную камеру из резервуара для препарата при заполнении насосной камеры, а выходной клапан обеспечивает поступление текучей среды только тогда, когда объем насосной камеры уменьшается под действием малогабаритного механического привода.
В еще одном варианте осуществления изобретения любой из описанных выше приводов выполнен из по существу плоских деталей, которые могут быть легко размещены одна поверх другой для формирования малогабаритного привода. Этот предпочтительный вариант осуществления настоящего изобретения обладает таким преимуществом, что он является относительно простым в производстве.
В еще одном варианте осуществления изобретения в любом из описанных выше приводов возвратные пружины для клинообразного элемента и рычага изготовлены из эластомерного материала, такого как силикон, и сформированы в процессе изготовления клинообразного элемента или рычага
В еще одном варианте осуществления изобретения механический привод подходит для микронасоса с насосной камерой, имеющей объем менее 100 микролитров.
Другие особенности и преимущества настоящего изобретения станут более понятны из дальнейшего подробного описания предпочтительных вариантов его осуществления со ссылками на чертежи.
Краткое описание чертежей
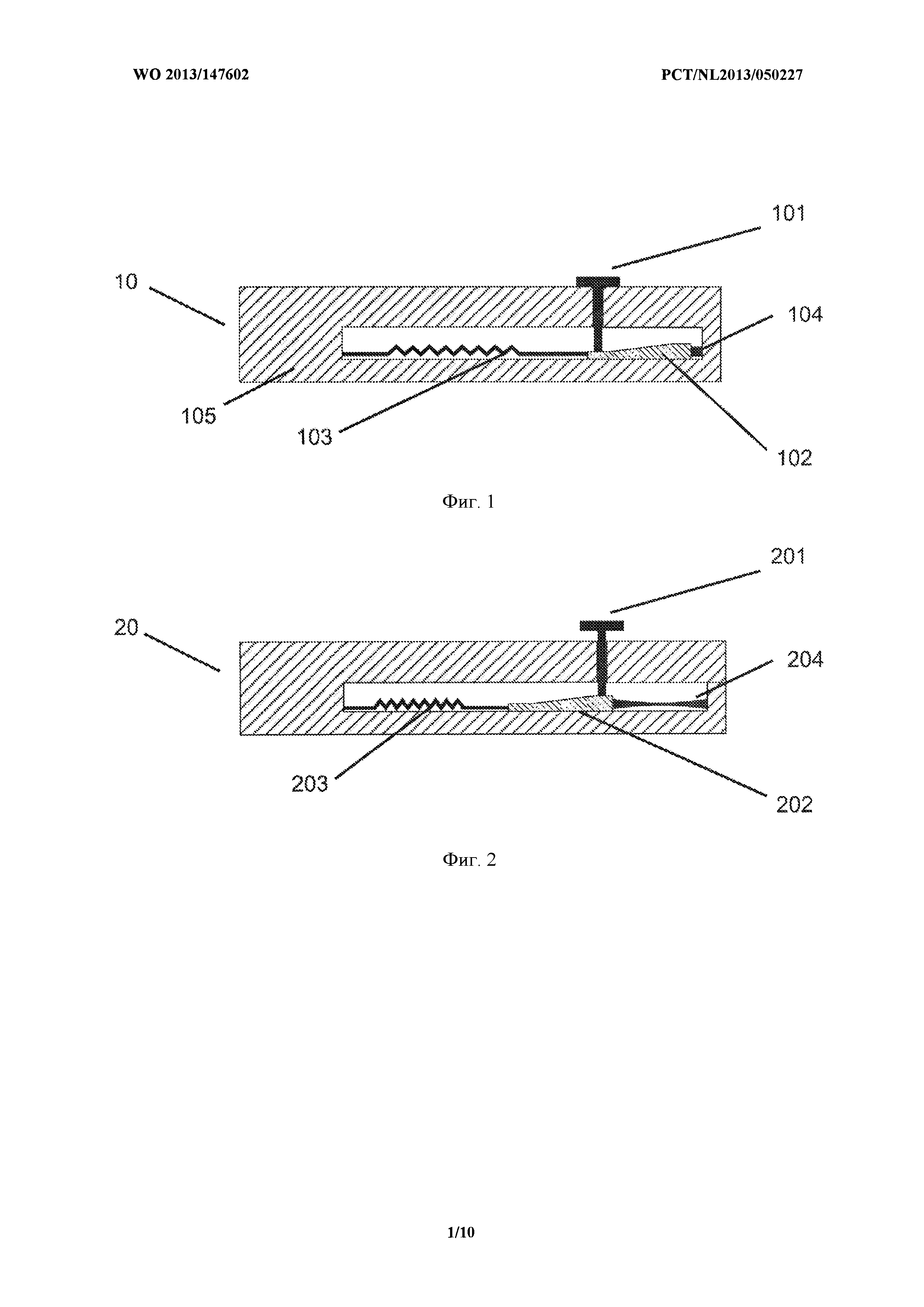
На фиг. 1 показан механический привод согласно первому варианту осуществления изобретения, вид в разрезе;
на фиг. 2 - то же, но со сжатой проволокой из сплава с эффектом памяти формы и с поршнем, отклоненным во второе положение, вид в разрезе;
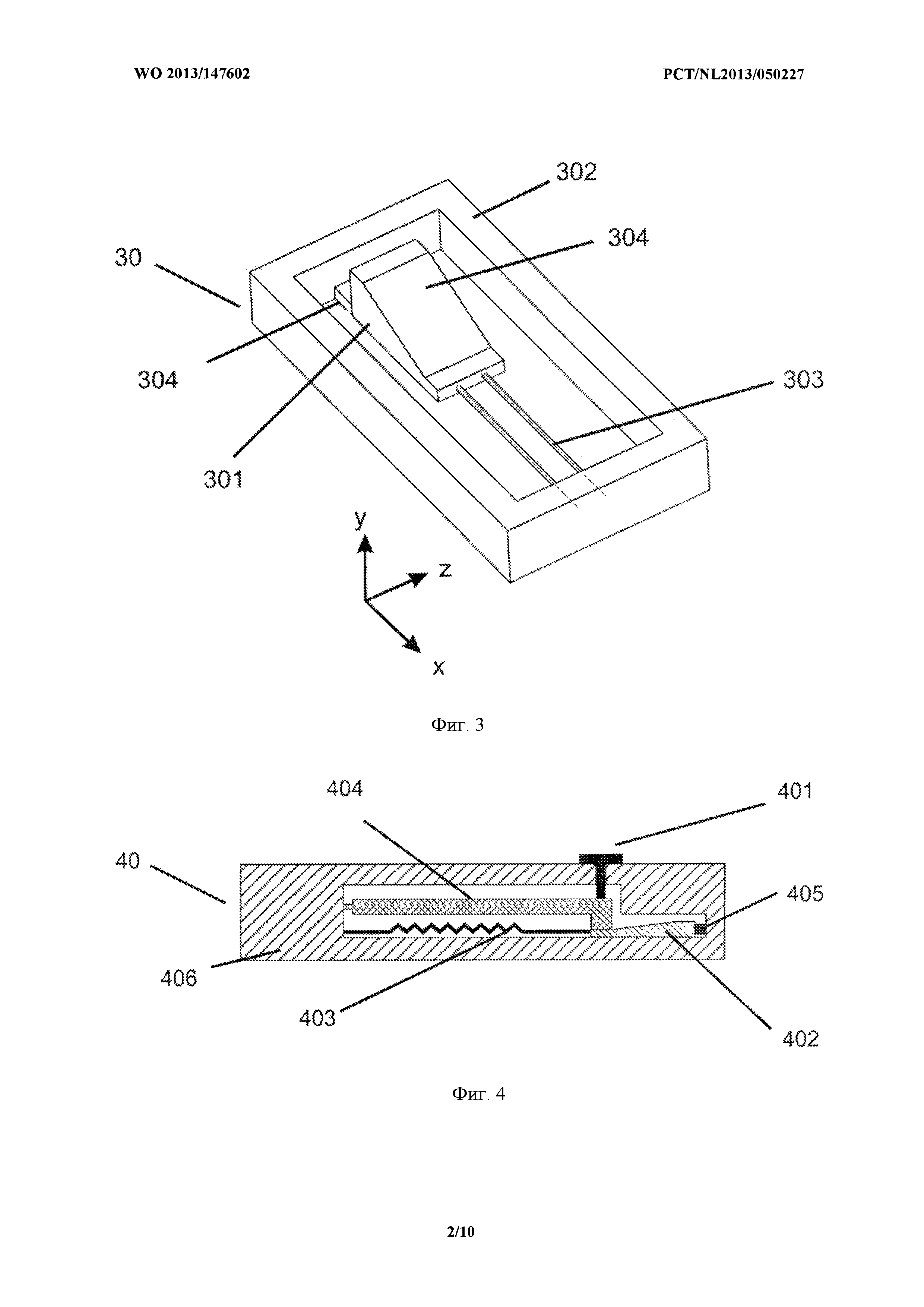
на фиг. 3 - ориентация клинообразного элемента, сплава с эффектом памяти формы и возвратной пружины;
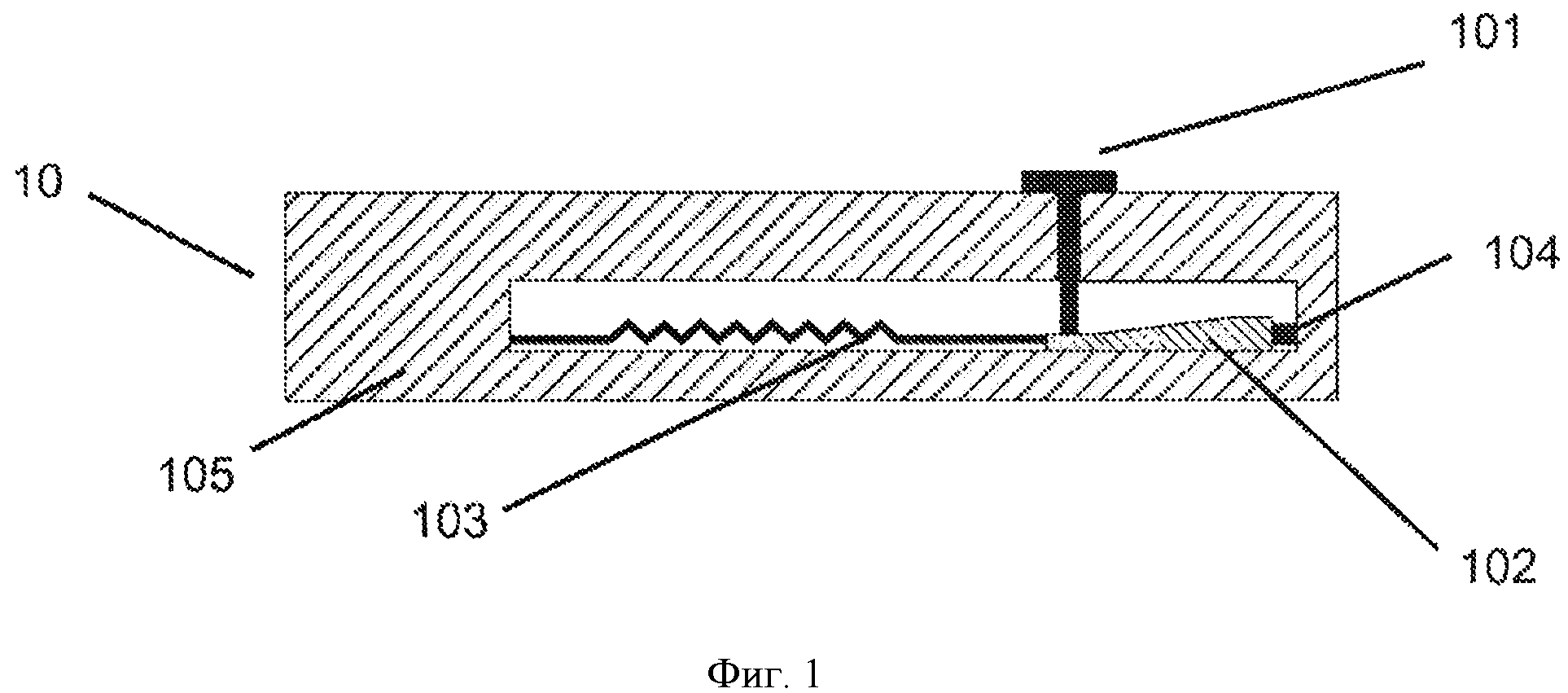
на фиг. 4 - механический привод согласно второму варианту осуществления изобретения, вид в разрезе;
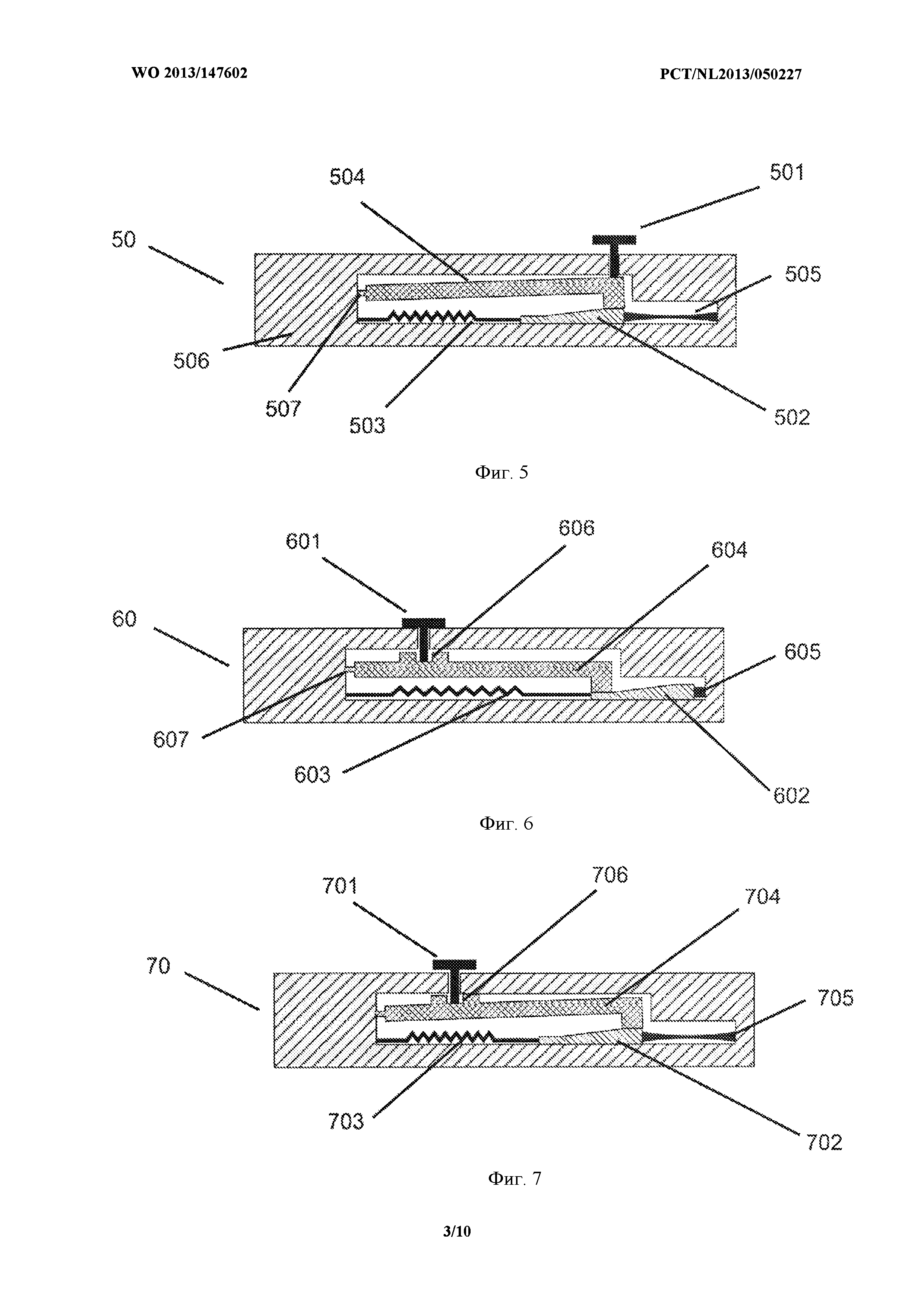
на фиг. 5 - то же, но со сжатой проволокой из сплава с эффектом памяти формы и с поршнем, отклоненным во второе положение, вид в разрезе;
на фиг. 6 - механический привод согласно третьему варианту осуществления изобретения, вид в разрезе;
на фиг. 7 - то же, но со сжатой проволокой из сплава с эффектом памяти формы и с поршнем, отклоненным во второе положение, вид в разрезе;
на фиг. 8 - механический привод согласно четвертому варианту осуществления изобретения, вид в разрезе;
на фиг. 9 - то же, но со сжатой проволокой из сплава с эффектом памяти формы и с поршнем, отклоненным во второе положение, вид в разрезе;
на фиг. 10 - первый вариант выполнения клинообразного элемента, сплава с эффектом памяти формы и возвратной пружины механического привода в соответствии с изобретением, вид в плане;
на фиг. 11 - второй вариант выполнения клинообразного элемента, сплава с эффектом памяти формы и возвратной пружины механического привода в соответствии с изобретением, вид в плане;
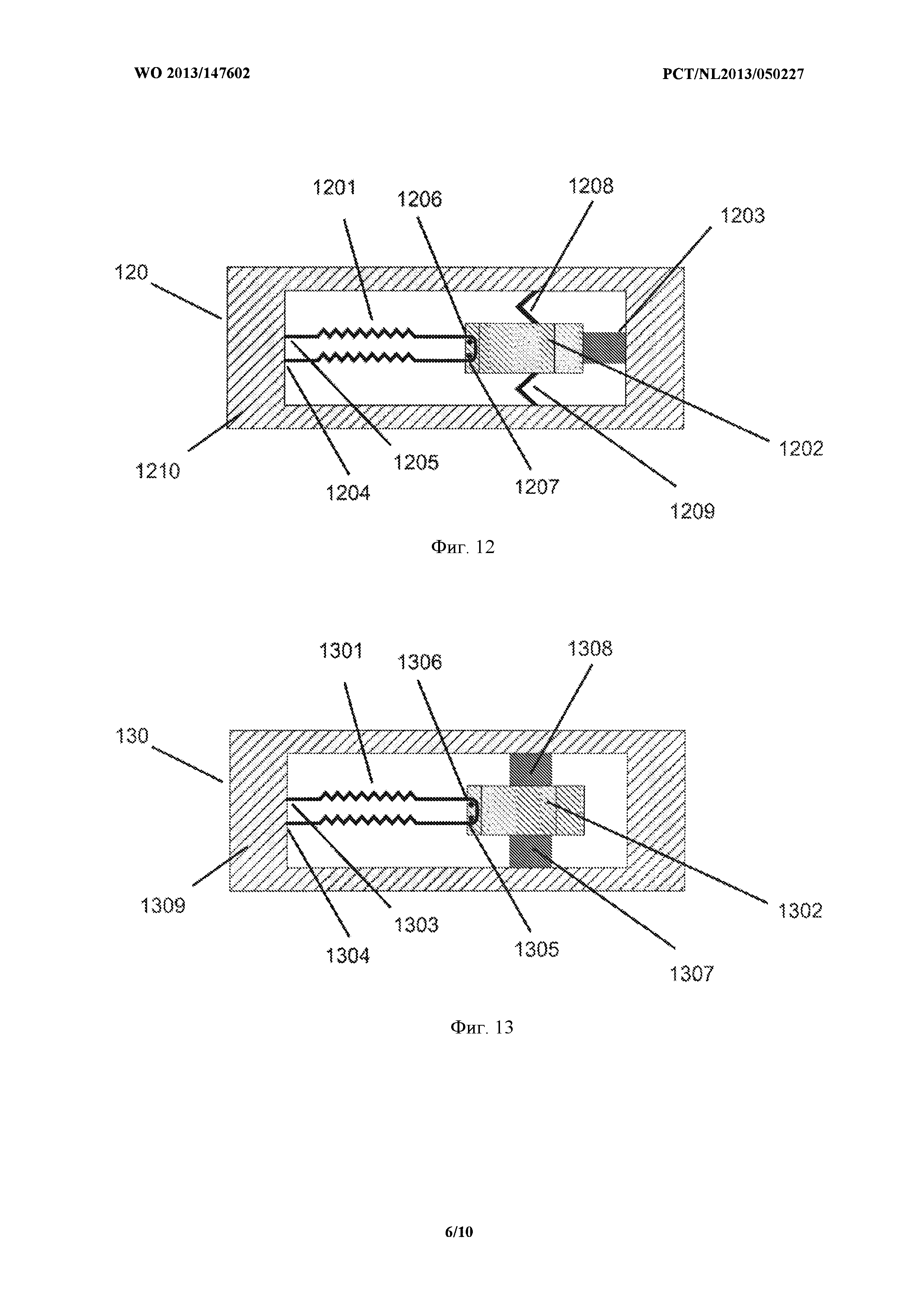
на фиг. 12 - третий вариант выполнения клинообразного элемента, сплава с эффектом памяти формы и возвратной пружины механического привода в соответствии с изобретением, вид в плане;
на фиг. 13 - четвертый вариант выполнения клинообразного элемента, сплава с эффектом памяти формы и возвратной пружины механического привода в соответствии с изобретением, вид в плане;
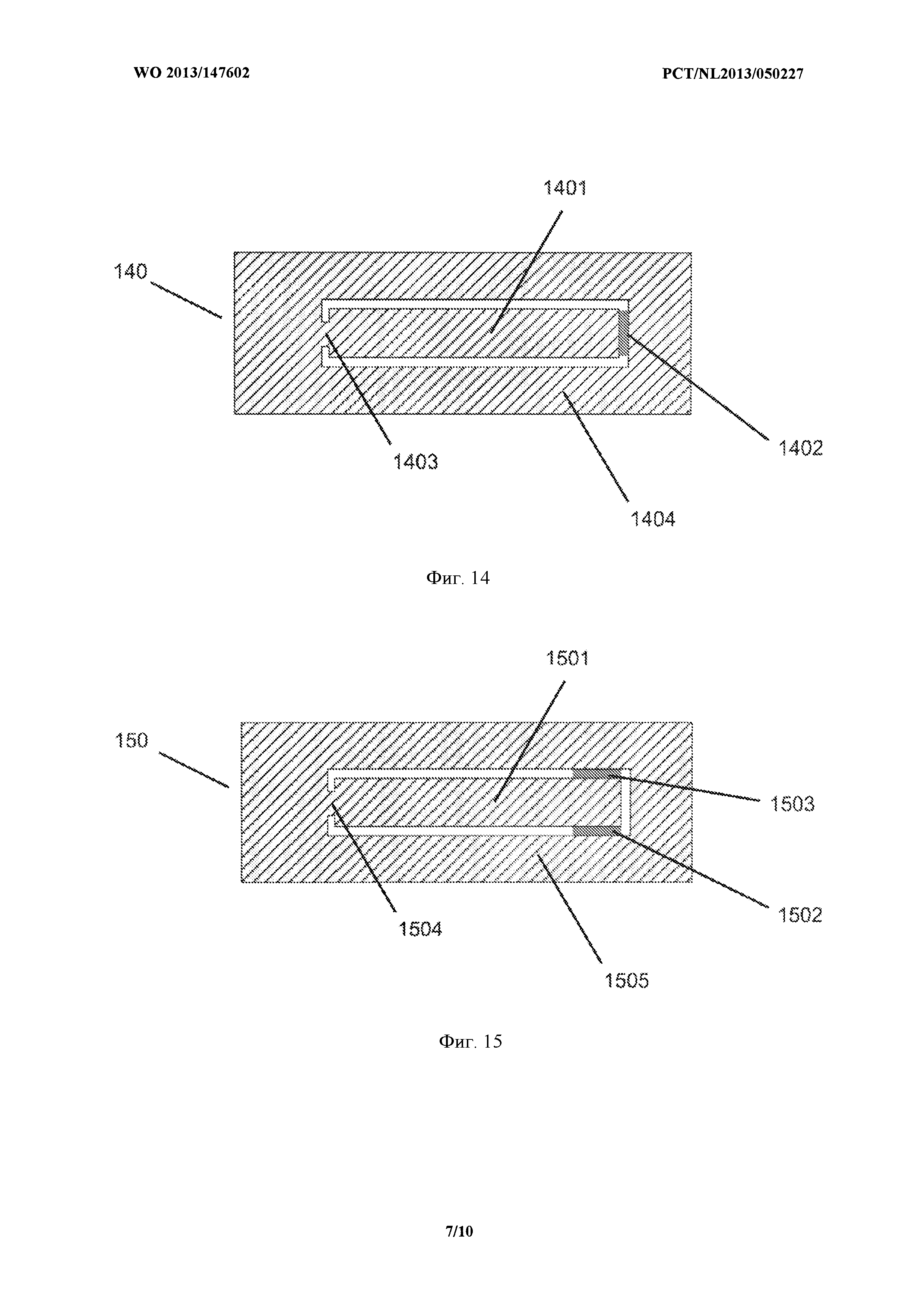
на фиг. 14 - первый вариант выполнения рычага и возвратных пружин механического привода в соответствии с изобретением, вид в плане;
на фиг. 15 - второй вариант выполнения рычага и возвратных пружин механического привода в соответствии с изобретением, вид в плане;
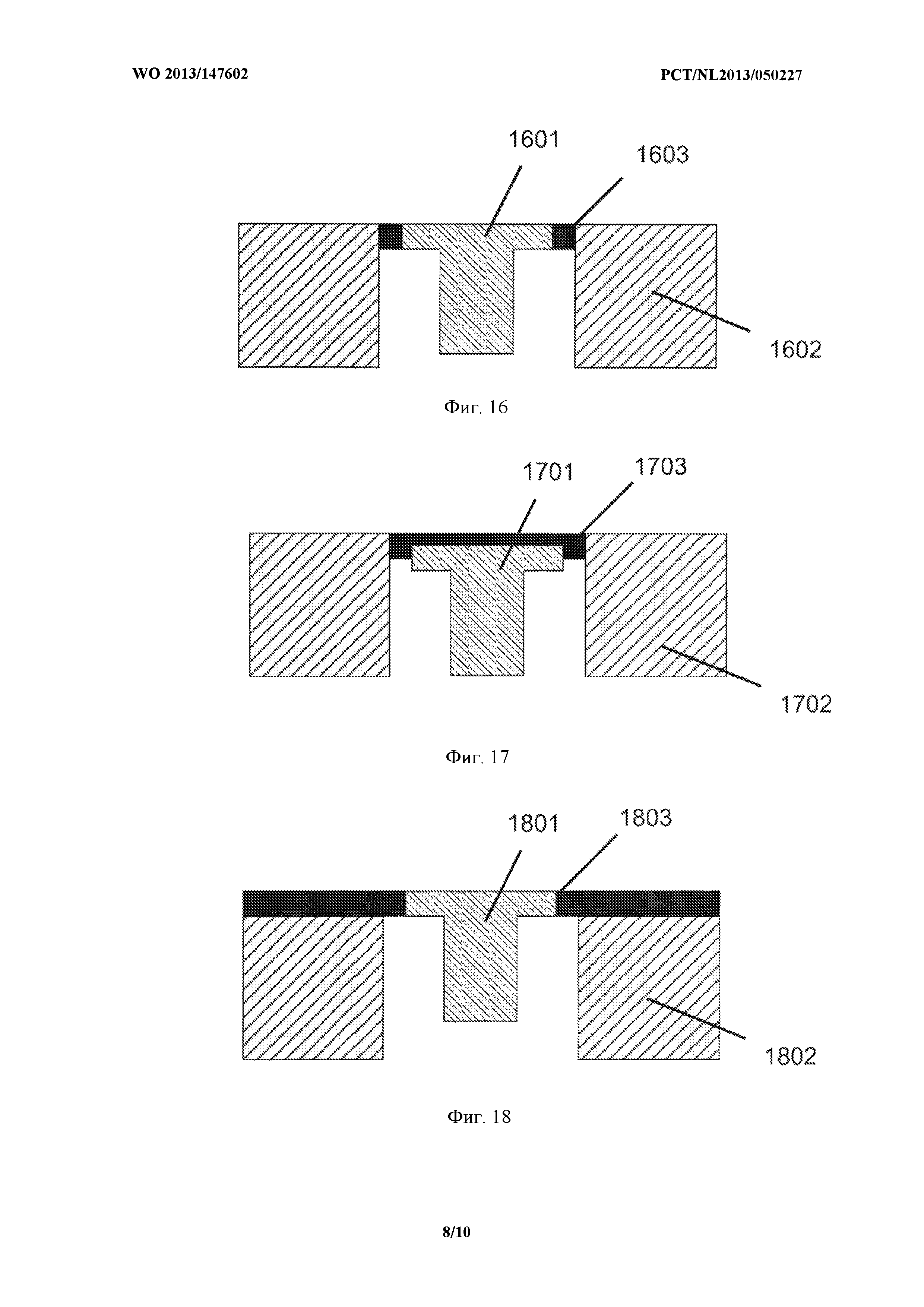
на фиг. 16 - первый вариант размещения возвратной пружины на поршне, вид в поперечном разрезе;
на фиг. 17 - второй вариант размещения возвратной пружины на поршне, вид в поперечном разрезе;
на фиг. 18 - третий вариант размещения возвратной пружины на поршне, вид в поперечном разрезе;
на фиг. 19 - четвертый вариант размещения возвратной пружины на поршне, вид в поперечном разрезе;
на фиг. 20 - механический привод согласно пятому варианту осуществления изобретения, вид в разрезе;
на фиг. 21 - то же, но со сжатой проволокой из сплава с эффектом памяти формы и с поршнем, отклоненным во второе положение, вид в разрезе;
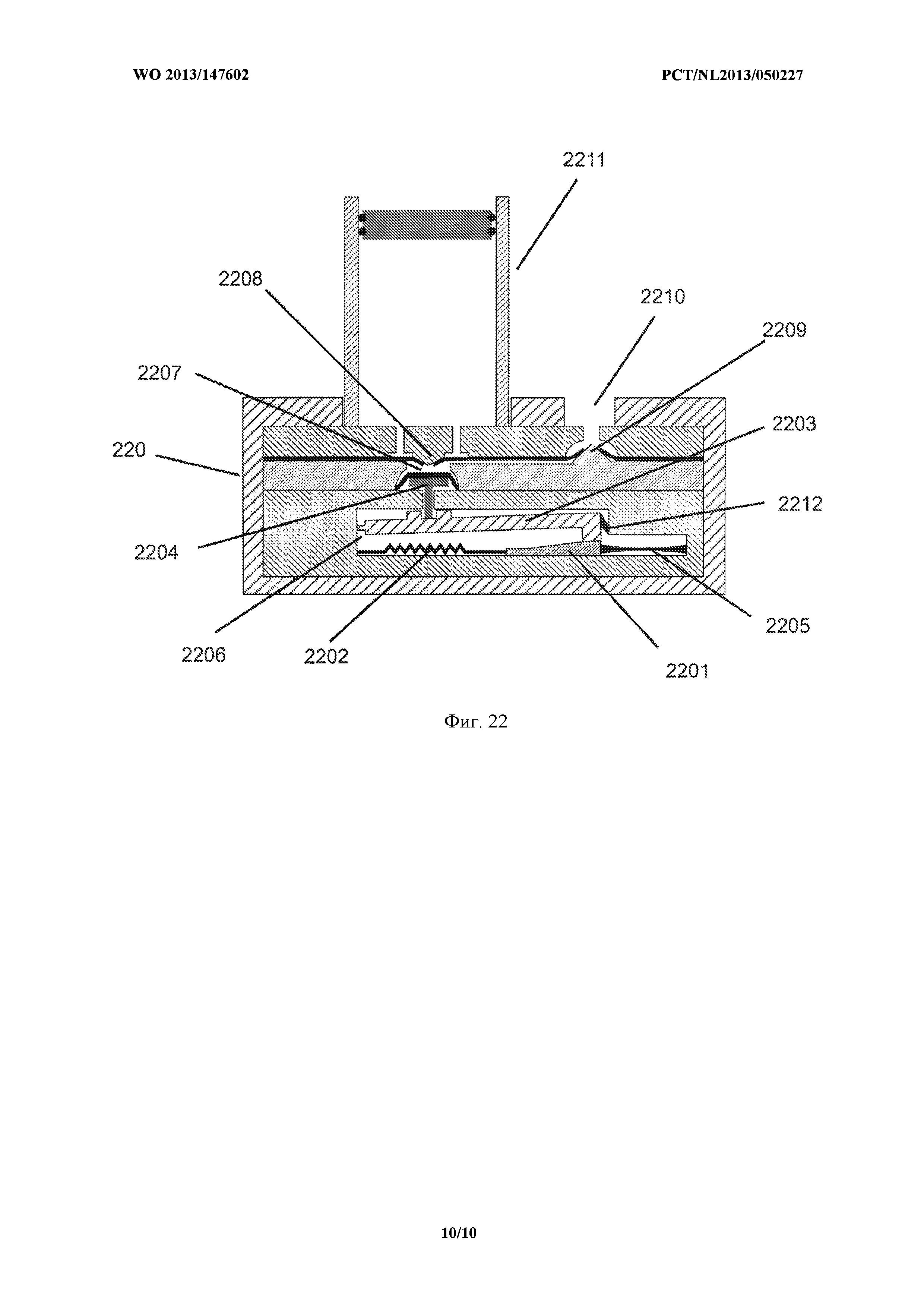
на фиг. 22 - микронасос с механическим приводом в соответствии с изобретением, вид в разрезе.
Осуществление изобретения
Первый вариант выполнения механического привода показан на фиг. 1. Механический привод представляет собой малогабаритный механический привод. На фиг. 1 малогабаритный механический привод 10 показан в неактивном состоянии. Малогабаритный механический привод 10 содержит клинообразный элемент 102, который установлен с возможностью перемещения в одной плоскости по существу в прямолинейном направлении. Клинообразный элемент 102 имеет по меньшей мере одну наклонную поверхность, которая образует угол с линейным направлением перемещения клинообразного элемента 102. К клинообразному элементу 102 прикреплен один конец исполнительного органа 103 с памятью формы, другой конец которого прикреплен к корпусу 105 привода 10. Исполнительный орган 103 с памятью формы установлен таким образом, что он действует вдоль прямолинейного направления перемещения клинообразного элемента 102. Исполнительный орган 103 с памятью формы также называется сплавом с эффектом памяти формы. Оба термина относятся к исполнительному органу, выполненному из сплава с эффектом памяти формы. К клинообразному элементу 102 также одним концом прикреплена возвратная пружина 104, которая своим другим концом прикреплена к корпусу 105 привода 10. Возвратная пружина 104 установлена таким образом, что она действует вдоль прямолинейного направления перемещения клинообразного элемента 102. Поршень 101 установлен таким образом, что один его край постоянно находится в контакте с наклонной поверхностью клинообразного элемента 102. Поршень 101 установлен с возможностью перемещения в направлении, по существу перпендикулярном плоскости, в которой перемещается клинообразный элемент 102. На фиг. 1 показано устройство в исходном положении, когда клинообразный элемент 102 и поршень 101 находятся в первом положении (также называемом исходным положением), сплав 103 с эффектом памяти формы находится в охлажденном состоянии и имеет вытянутую форму, а возвратная пружина 104 находится в сжатом состоянии.
Исполнительный орган 103 с памятью формы может представлять собой проволоку, сформированную из нескольких металлических сплавов с эффектом памяти формы, таких как NiTi (никель - титан), CuZnAl и CuAlNi. Исполнительный орган с памятью формы может быть прикреплен к корпусу 105 и клинообразному элементу 102, например, при помощи запрессовки или других способов, известных специалистам в данной области техники. В предпочтительном варианте осуществления изобретения возвратная пружина 104 изготовлена из эластомерного материала, такого как силикон или резина. Предпочтительно возвратная пружина 104 изготовлена литьем под давлением или литьем эластомерного материала. Возвратная пружина 104 может быть также изготовлена путем литья эластомерного материала с последующим отверждением под действием излучения. В еще одном предпочтительном варианте осуществления изобретения эластомер выполняется при помощи литья под давлением или монолитно с фиксацией возвратной пружины на клинообразном элементе 102 и корпусе 105. Для этого можно использовать эластомерные материалы, содержащие вязкие жидкие силиконовые материалы, предназначенные для литья под давлением, такие как Elastosil LR 3071 и Silpuran 6700 (фирмы Wacker Chemie AG, г. Мюнхен, Германия) и самоклеящиеся жидкие силиконовые материалы для литья с отверждением под действием ультрафиолетового излучения, такие как Loctite Nuva-Sil Silicone (фирмы Henkel AG & Co. KGaA, г. Дюссельдорф, Германия) и Novaguard RTV 800-305 (фирмы NovaGuard, г. Клевланд, штат Огайо, США).
Предпочтительно применяемый для изготовления корпуса 105 материал может быть использован и для изготовления клинообразного элемента 102. В этом случае процесс производства упрощается, поскольку можно изготовить клинообразный элемент 102 и корпус 105 в одном процессе, например литьем под давлением.
На фиг. 2 показан описанный выше механический привод после его срабатывания. Для приведения в действие механического привода 20 необходим нагрев исполнительного органа 203 из сплава с эффектом памяти формы, предпочтительно путем пропускания через него электрического тока. Исполнительный орган 203 с памятью формы при нагреве сжимается и смещает клинообразный элемент 202 во второе положение. Смещение клинообразного элемента 202 приводит к увеличению длины возвратной пружины 204 и смещению поршня 201 во второе положение в прямолинейном направлении, по существу перпендикулярном плоскости перемещения клинообразного элемента 202. На фиг. 2 исполнительный орган 203 из сплава с памятью формы находится в сжатом состоянии, клинообразный элемент 202 находится во втором положении, возвратная пружина 205 находится в удлиненном состоянии, и поршень 201 перемещен во второе положение.
После остывания или охлаждения исполнительного органа 203 из сплава с памятью формы происходит его распрямление. После остывания рабочего органа 203 из сплава с памятью формы возвратная пружина 204 перемещает клинообразный элемент 202 в первое положение. Когда клинообразный элемент 202 возвращается в первое положение, поршень 201 также перемещается в свое первое положение. Первые положения (также называемые исходными положениями) клинообразного элемента 202 и поршня 201 являются положениями клинообразного элемента 102 и поршня 101, показанными на фиг. 1.
На фиг. 3 показан предпочтительный вариант выполнения клинообразного элемента 301 и корпуса 302 малогабаритного привода 30 в соответствии с изобретением. Рабочий орган 303 из сплава с памятью формы одним краем прикреплен к клинообразному элементу 301, а другим краем - к корпусу 302. Возвратная пружина 304 одним концом прикреплена к клинообразному элементу 301, а другим - к корпусу 302. Клинообразный элемент 301 установлен таким образом, чтобы он прямолинейно перемещаелся вдоль оси х малогабаритного механического привода 30. Клинообразный элемент 301 также предпочтительно установлен таким образом, чтобы его наклонная поверхность 304 мола перемещаться вдоль оси х с сохранением угла с осью z и осью х. Предпочтительно клинообразный элемент 301 установлен так, чтобы он не мог поворачиваться относительно оси х или оси у.
На фиг 4 показан второй вариант выполнения механического привода согласно настоящему изобретению, в основном идентичный первому описанному со ссылками на фиг. 1, 2 и 3, за исключением наличия рычага 404, функционально соединяющего клинообразный элемент 402 с поршнем 401. Рычаг 404 выполнен с возможностью поворота относительно неподвижной точки вращения. Клинообразный элемент 402 находится в постоянном контакте с рычагом 404 в точке, расположенной на некотором расстоянии от неподвижной точки вращения, для отклонения рычага 404 относительно неподвижной точки вращения. Точка привода поршня расположена на рычаге 404 и находится в постоянном контакте с ним на некотором расстоянии от неподвижной точки вращения рычага 404. Поршень 401 находится в постоянном контакте с рычагом 404. Специалистам должно быть понятно, что элементы привода по первому варианту его выполнения могут быть использованы во втором варианте осуществления изобретения. На фиг. 4 показан механический привод 40 в начальном положении. Клинообразный элемент 402, рычаг 404 и поршень 401 находятся в первом положении. Сплав 403 с эффектом памяти формы находится в удлиненном состоянии, а возвратная пружина 405 сжата. Рычаг 404 установлен так, чтобы он находился в постоянном контакте с клинообразным элементом 402. Клинообразный элемент 402 связан с корпусом 406 через возвратную пружину 405. Неподвижная точка вращения также может называться центром вращения. Оба термина относятся к неподвижной точке, вокруг которой поворачивается рычаг 404.
На фиг. 5 показан механический привод по второму варианту осуществления изобретения после его срабатывания. Нагрев сплава 503 с эффектом памяти формы производится предпочтительно путем пропускания через него электрического тока. Нагретый сплав 503 с эффектом памяти формы сжимается, вследствие чего он перемещает клинообразный элемент 502 из первого положения, показанного на фиг. 4, во второе положение, показанное на фиг. 5. Когда клинообразный элемент 502 перемещается из первого положения во второе, происходит удлинение возвратной пружины 505, а также рычаг 504 перемещается из первого положения, показанного на фиг. 4, во второе положение, показанное на фиг. 5. Рычаг перемещается в угловом направлении относительно центра 507 вращения. Когда рычаг 504 перемещается во второе положение, происходит перемещение поршня 501 из первого положения, показанного на фиг. 4, во второе положение, показанное на фиг. 5. В механическом приводе 50 рычаг 504 связан с корпусом в неподвижной точке 507 вращения. Подвижная точка поршня также упоминается как точка контакта. Оба термина относятся к точке, расположенной на рычаге 504, в которой происходит воздействие на поршень 501 для его перемещения.
На фиг. 6 показан третий вариант выполнения механического привода согласно изобретению, который по существу аналогичен второму варианту выполнения, показанному на фиг. 4 и 5, за исключением местоположения точки 606 контакта (также называемой подвижной точкой поршня) между поршнем 601 и рычагом 604. Поршень 601 расположен между центром 607 вращения рычага 604 и краем рычага, контактирующего с клинообразным элементом 602. Положение точки 606 контакта может быть зафиксировано относительно центра 607 вращения и точки контакта рычага с клинообразным элементом 602 для оптимизации точности перемещения поршня 601. В качестве примера можно указать на то, что погрешность в перемещении рычага в точке контакта с клинообразным элементом 602 может быть снижена за счет фиксации точки 606 контакта ближе к центру 607 вращения. На фиг. 6 показан механический привод 60 в начальном положении, в котором клинообразный элемент 602, рычаг 604 и поршень 601 находятся в первом положении, сплав 603 с эффектом памяти формы находится в охлажденном и вытянутом состоянии, а возвратная пружина 605 находится в сжатом состоянии.
Специалистам должно понятно, что элементы конструкции клинообразного элемента, показанные на фиг. 3, могут быть использованы и в третьем варианте осуществления изобретения. Также понятно, что конструкция рычага, показанная на фиг. 14 и 15, может быть включена в третий вариант выполнения механического привода в соответствии с изобретением.
На фиг. 7 показан механический привод по третьему варианту осуществления изобретения после его срабатывания. Приведение в действие такого механического привода осуществления по существу аналогично приведению в действие механического привода по второму варианту. При этом клинообразный элемент 702, рычаг 704 и поршень 701 привода 70 находятся во втором положении. На фиг. 7 показаны также сплав 703 с эффектом памяти формы, возвратная пружина 705 и точка 706 привода поршня.
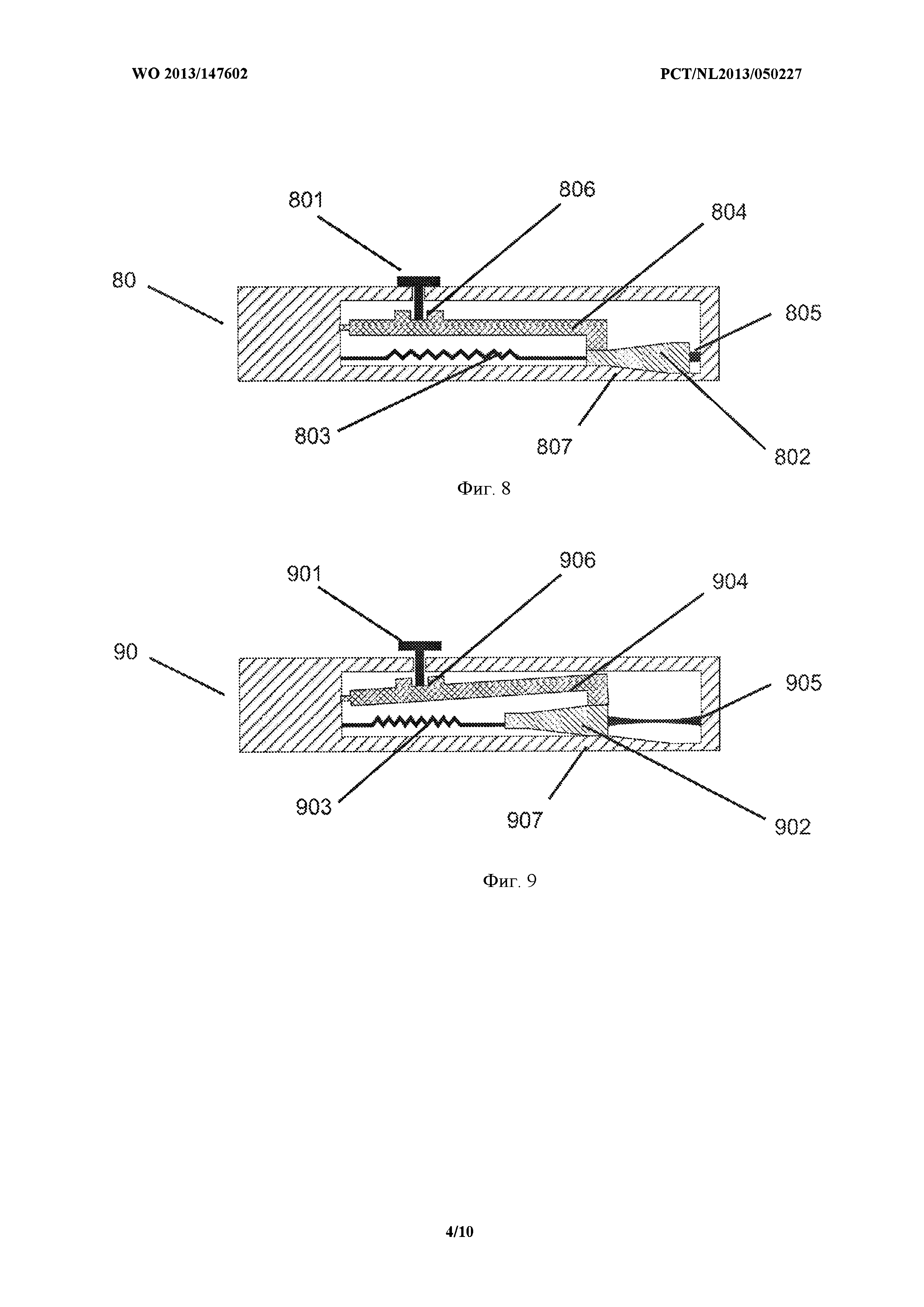
На фиг. 8 показан четвертый вариант выполнения механического привода согласно изобретению, который по существу аналогичен второму и третьему вариантам, за исключением выполнения клинообразного элемента 802. Клинообразный элемент 802 в четвертом варианте имеет две наклонные поверхности. Первая наклонная поверхность контактирует с рычагом 804, а вторая, противоположная ей поверхность, находится в контакте с корпусом 807. Участок корпуса 807, контактирующий с клинообразным элементом 802, выполнен наклонным. Наклонная поверхность корпуса 807 расположена таким образом, что когда клинообразный элемент 802 перемещается из первого положения во второе, она отклоняет его к рычагу 804. Положение после срабатывания механического привода по четвертому варианту его выполнения более подробно показано на фиг. 9. Специалистам должно быть понятно, что определенные варианты выполнения клинообразного элемента, показанного на фиг. 3, могут быть включены в четвертый вариант выполнения механического привода. На фиг. 8 показан механический привод в начальном положении. Клинообразный элемент 802, рычаг 804 и поршень 801 находятся в первом положении. Сплав 803 с эффектом памяти формы находится в вытянутом состоянии, а возвратная пружина 805 сжата. Рычаг 804 установлен таким образом, чтобы он постоянно находился в контакте с клинообразным элементом 802. На фиг. 8 также показана подвижная точка 806 контакта поршня с рычагом 804 механического привода 80. На фиг. 9 механический привод показан после его срабатывания. Нагрев сплава 903 с эффектом памяти формы предпочтительно производится путем пропускания через него электрического тока. Нагретый сплав 903 с эффектом памяти формы сжимается и перемещает клинообразный элемент 902 из первого положения, показанного на фиг.8, во второе положение, показанное на фиг.9, за счет чего происходит удлинение возвратной пружины 905, а клинообразный элемент проходит вдоль наклонной поверхности корпуса 907, так что наклонные поверхности корпуса 907 и клинообразного элемента отклоняют элемент 902 к рычагу 904.
Когда клинообразный элемент 902 перемещается из первого положения во второе, он перемещает рычаг 904 из первого положения, показанного на фиг. 8, во второе положение, показанное на фиг. 9. При этом рычаг перемещает поршень 901 из первого положения, показанного на фиг. 8, во второе положение, показанное на фиг. 9. На фиг. 9 также показан поршень 901 и подвижная точка 906 контакта поршня с рычагом 904 привода 90. Четвертый вариант выполнения механического привода согласно изобретению обладает тем преимуществом, такое выполнение привода позволяет увеличить расстояние, на которое клинообразный элемент может смещать рычаг и поршень при заданной величине сжатия сплава с эффектом памяти формы без увеличения угла наклонной поверхности.
Специалистам должно быть понятно, что клинообразный элемент и корпус, описанные в четвертом варианте, могут быть использованы в первом и втором вариантах.
На фиг. 10-13 показаны альтернативные варианты компоновки клинообразного элемента, сплава с эффектом памяти формы и возвратной пружины.
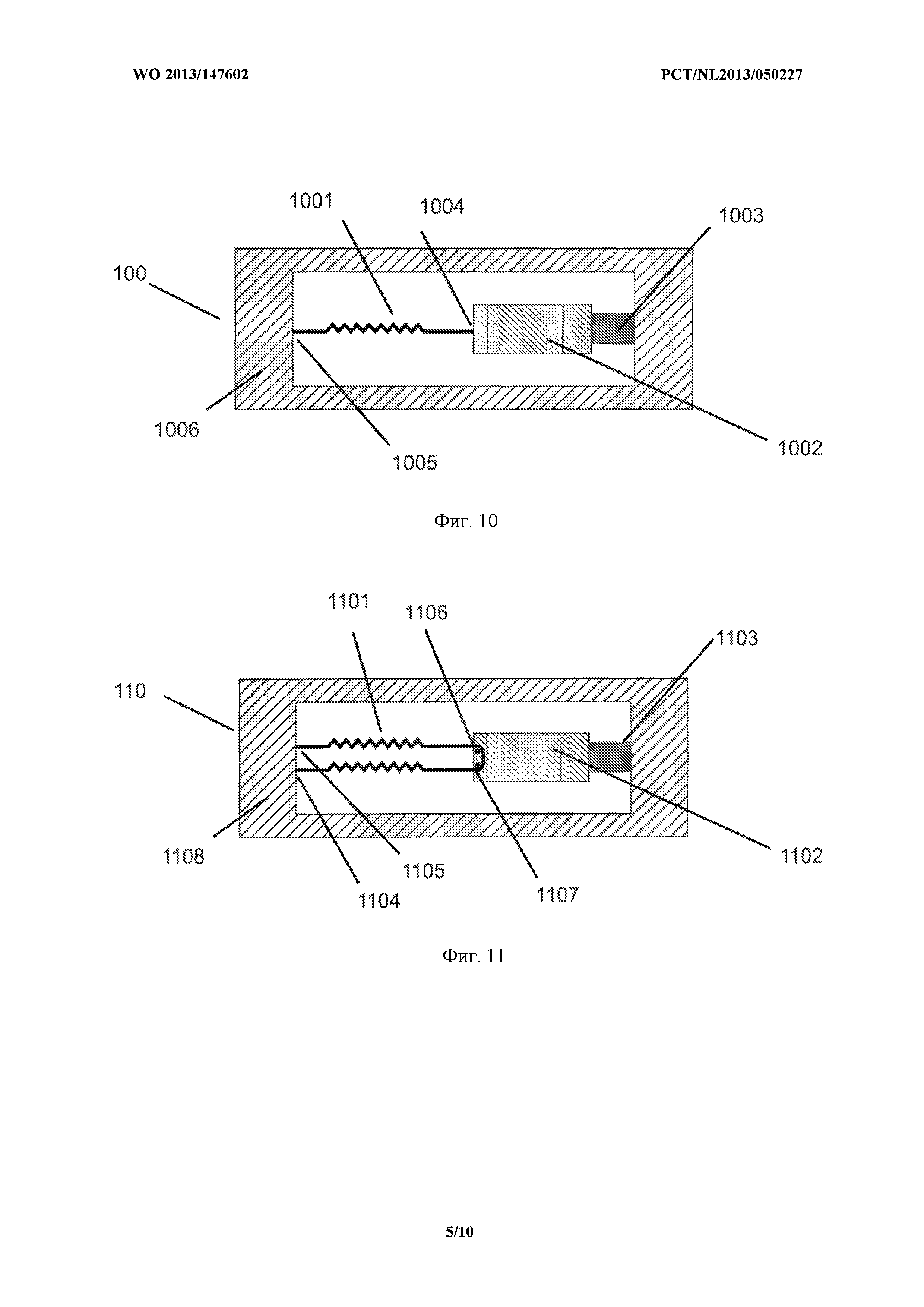
На фиг. 10 показан вариант установки сплава 1001 с эффектом памяти формы, согласно которому один его конец прикреплен к клинообразному элементу 1002 в первой точке 1004 и к корпусу 1006 во второй точке 1005. На фиг. 10 показано размещение клинообразного элемента и возвратной пружины 1003. Возвратная пружина 1003 одним коном прикреплена к корпусу, а другим - к тому краю клинообразного элемента 1002, который расположен напротив точки 1004 крепления клинообразного элемента 1002 к сплаву с эффектом памяти формы.
На фиг. 11 показана другая компоновка, по существу аналогичная показанной на фиг. 10, за исключением выполнения сплава 1101 с эффектом памяти формы. В этом варианте сплав 1101 с эффектом памяти формы одним концом присоединен в первой и второй точкам 1104 и 1105 корпуса 1108. Сплав 1101 с эффектом памяти формы огибает элементы 1106 и 1107, расположенные на клинообразном элементе 1102, таким образом, чтобы он мог свободно скользить вокруг этих элементов. Такой вариант установки имеет преимущество, заключающееся в том, что точки 1104 и 1105 крепления могут быть использованы для электрического соединения сплава 1101 с эффектом памяти формы. Клинообразный элемент 1102 связан с корпусом 1108 при помощи возвратной пружины 1103.
На фиг. 12 показан альтернативный вариант установки, по существу аналогичный показанному на фиг. 11 с добавлением перегородок 1208 и 1209, соединяющих клинообразный элемент 1202 с корпусом 1210. Элементы 1208 и 1209 обеспечивают перемещение клинообразного элемента 1202, по меньшей мере, вдоль необходимой плоскости перемещения. Элементы 1208 и 1209 позволяют изготовить клинообразный элемент и корпус в виде единой детали. Сплав 1201 с памятью формы огибает элементы 1206 и 1207 и крепится в первой и второй точках 1204, 1205. Клинообразный элемент 1202 соединен с рамой 1210 через возвратную пружину 1203. Специалистам в данной области техники понятно, что данные особенности выполнения могут быть использованы в варианте компоновки, показанном на фиг. 10.
На фиг. 13 показано альтернативное размещение клинообразного элемента и возвратной пружины. Возвратные пружины 1307 и 1308 прикреплены одними концами к корпусу 1309, а другими - к боковой стороне клинообразного элемента 1302, которая противоположна стороне, где есть точка крепления сплава 1301 с эффектом памяти формы. Сплав 1301 с эффектом памяти формы огибает элементы 1305 и 1306 и крепится в первой и второй точках 1303, 1304. Специалистам в данной области техники понятно, что определенные элементы компоновки, показанной на фиг. 13, могут быть включены в компоновку, показанную на фиг. 10. Специалистам также понятно, что особенности компоновки, показанной на фиг. 12, могут быть включены в компоновку, показанную на фиг. 13.
Сплав с эффектом памяти формы может закрепляться в точках крепления при помощи обжатия, пайки или сварки. Специалистам в данной области техники понятно, что для фиксации сплава с эффектом памяти формы существуют и другие способы.
Специалистам также должно быть понятно, что определенные варианты компоновок, показанных на фиг. 10, 11, 12 и 13, могут быть добавлены в другие варианты осуществления настоящего изобретения.
На фиг. 14 и 15 показана дополнительная возвратная пружина для рычага, показанного на фиг. 4 и 5. Дополнительная возвратная пружина перемещает рычаг в исходное положение и удерживает подвижный конец рычага в постоянном контакте с клинообразным элементом. Показанная на фиг. 14 дополнительная возвратная пружина 1402 установлена таким образом, что один ее конец соединен с рычагом 1401, а другой - с корпусом 1404. Дополнительная возвратная пружина 1402 прикреплена к концу рычага 1401, выполненного с возможностью поворота вокруг центра 1403 вращения.
На фиг. 15 показан альтернативный вариант выполнения возвратной пружины рычага. Возвратные пружины 1502 и 1503 прикреплены одними концами к боковым сторонам рычага 1501, а другими - к корпусу 1505. Специалистам в данной области техники понятно, что возможны другие подходящие варианты размещения возвратной пружины. Рычаг 1501 выполнен с возможностью поворота вокруг центра 1054 вращения.
Предпочтительны возвратная пружины 1402, 1502 и 1503 изготовлены из эластомерного материала, такого как силикон или резина. В предпочтительном варианте осуществления изобретения возвратные пружины 1402, 1502 и 1503 изготовлены литьем под давлением или обычным литьем эластомерного материала. В еще одном предпочтительном варианте осуществления изобретения возвратные пружины 1402,1502 и 1503 изготовлены литьем под давлением эластомерного материала с последующим отверждением при помощи излучения. В еще одном варианте осуществления изобретения эластомерный материал получается литьем под давлением или монолитно с фиксацией возвратных пружин 1402, 1502 и 1503 на рычагах 1401 и 1501 и на корпусах 1404 и 1505. Для литья под давлением можно использовать некоторые эластомерные материалы, содержащие вязкие жидкие силиконовые вещества, например, такие как Elastosil LR 3071 и Silpuran 6700 (фирмы Wacker Chemie AG, г. Мюнхен, Германия), и вязкие жидкие силиконовые материалы для литья с отверждением под действием ультрафиолетового излучения, такие как Loctite Nuva-Sil Silicone (фирмы Henkel AG & Co. KGaA, r. Дюссельдорф, Германия) и Novaguard RTV 800-305 (фирмы NovaGuard, г. Клевланд, штат Огайо, США). Предпочтительно для изготовления корпуса 105 используется такой же материал, что и для клинообразного элемента 102. В этом случае упрощается процесс производства за счет изготовления клинообразного элемента 102 и корпуса 105 в одном процессе, например, литьем под давлением.
Рычаги 1401 и 1501 выполнены из полимера, обеспечивающего необходимые механические свойства и позволяющего сопротивляться износу при перемещении клинообразного элемента и поршня. Предпочтительно такой материал должен обладать низким коэффициентом трения. Для изготовления рычагов 1401 и 1501 могут быть пригодны такие материалы, как полиэфир-эфир-кетон, Grivory, поликарбонат и полиакрилат. Специалистам в данной области техники известны другие материалы, пригодные для изготовления рычагов 1401 и 1501. Рычаги 1401 и 1501 могутт изготавливаться литьем под давлением полимера или литьем полимера. Специалистам в данной области техники известны и другие способы изготовления рычагов 1401 и 1501. Предпочтительно, чтобы технология изготовления, применяемая для изготовления рычагов 1401 и 1501, обеспечивала изготовление деталей с точностью выше ±20 мкм. Также предпочтительно, чтобы технологии, выбранные для изготовления рычагов 1401 и 1501, обеспечивали быстрое и рентабельное изготовление большого количества деталей. Предпочтительно, чтобы материал, применяемый при изготовлении корпусов 1401 и 1505, был тем же, что и материал, выбранный для рычагов 1401 и 1501. В этом случае упрощается процесс производства и за счет изготовления рычагов 1401 и 1501 и корпусов 1404 и 1505 в одном процессе, таком как литье под давлением.
На фиг. 14 и 15 показаны рычаги 1401 и 1501 соответственно, у которых один конец установлен на корпусах 1404 и 1505 соответственно, в точках вращения 1404 и 1504 соответственно. Предпочтительно точки 1404 и 1504 вращения образуются путем удаления материала с рычагов 1401 и 1501 в данной части устройства для обеспечения изгиба рычага по существу в точках 1404 и 1504 вращения. Понятно, что возможно применение альтернативных конструкций формирования центра вращения.
Также понятно, что варианты выполнения рычага, показанные на фиг. 14 и 15, могут быть включены и в другие варианты выполнения механического привода согласно изобретению.
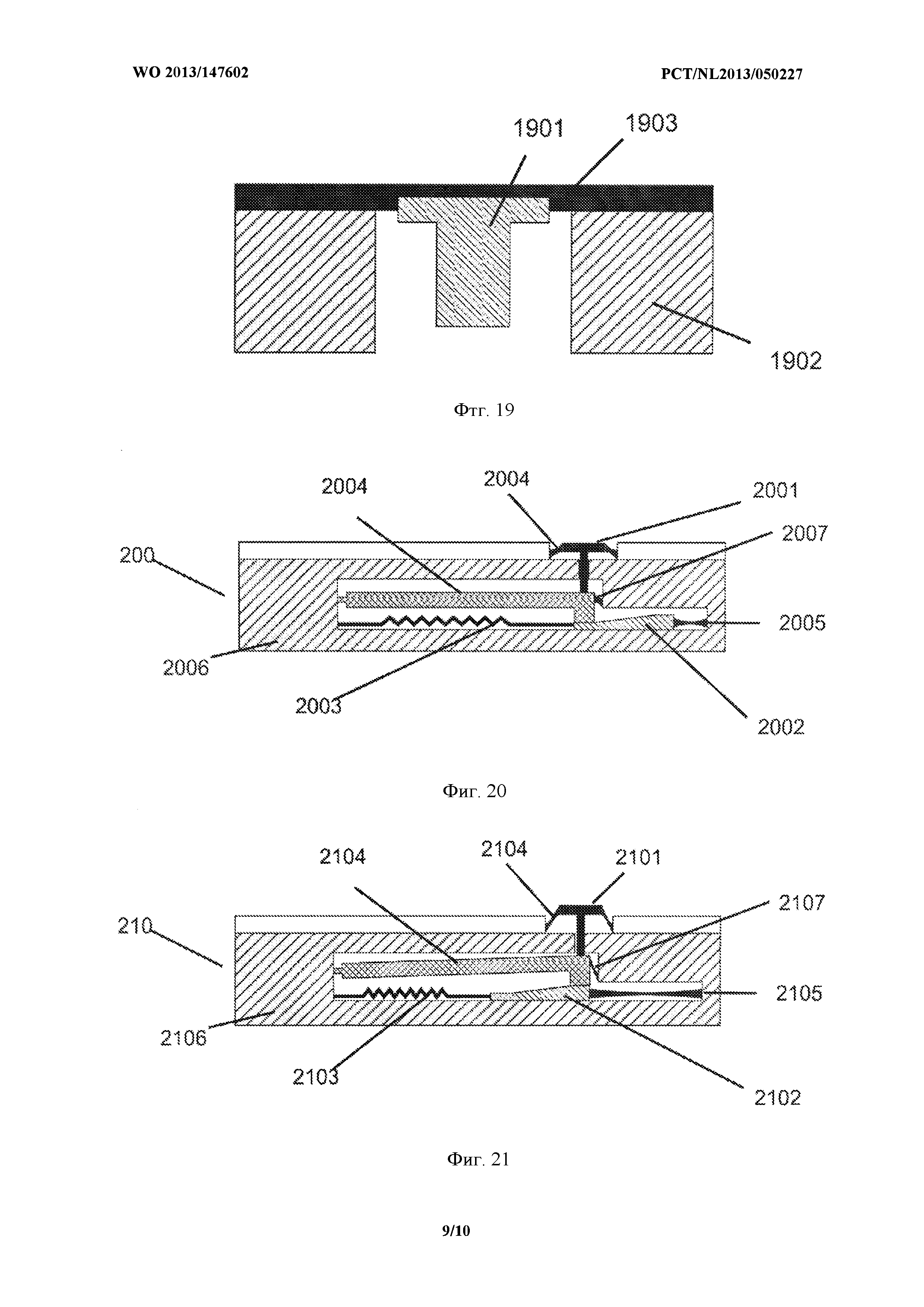
На фиг. 16 - 19 показаны альтернативные варианты расположения возвратной пружины поршня. Возвратная пружина перемещает поршень в исходное положение (его первое положение) и удерживает его в постоянном контакте с рычагом или клинообразным элементом в различных вариантах осуществления настоящего изобретения. На фиг. 16 показана возвратная пружина 1603, установленная между корпусом 1602 и поршнем 1601. На фиг. 17 показана возвратная пружина 1703, установленная между корпусом 1702 и поверхностью поршня 1601. На фиг. 18 показана возвратная пружина 1803, установленная на одной грани корпуса 1802 и на поршне 1801. На фиг. 19 показана возвратная пружина 1903, сформированная на одной грани корпуса 190 и на поверхности поршня 1901.
В предпочтительном варианте осуществления изобретения возвратная пружина поршней 1601, 1701, 1801 и 1901 изготовлена из эластомерного материала, такого как силикон или резина. Предпочтительно возвратная пружина поршнней 1601, 1701, 1801 и 1901 изготовлена путем литья под давлением или литья эластомерного материала. В еще одном предпочтительном варианте осуществления изобретения возвратная пружина поршней 1601, 1701, 1801 и 1901 изготовлена путем литья эластомерного материала с последующим отверждением под действием излучения. В еще одном предпочтительном варианте осуществления изобретения производится литье под давлением или литье с фиксацией возвратной пружины поршней 1601, 1701, 1801 и 1901 на поршнях 1601, 1701, 1801 и 1901 и на корпусах 1602, 1702, 1802 и 1902. Для литья под давлением можно использовать некоторые эластомерные материалы, содержащие вязкие жидкие силиконовые вещества, например, такие как Elastosil LR 3071 и Silpuran 6700 (фирмы Wacker Chemie AG, г. Мюнхен, Германия) и вязкие жидкие силиконовые вещества для литья с отверждением под действием ультрафиолетового излучения, такие как Loctite Nuva-Sil Silicone (фирмы Henkel AG & Co. KGaA, г. Дюссельдорф, Германия) и Novaguard RTV 800-305 (фирмы NovaGuard, г. Клевланд, штат Огайо, США). Предпочтительно, чтобы материал, применяемый при изготовлении корпусов 1602, 1702, 1802 и 1902, был выбран таким же, как и для поршней 1601, 1701, 1801 и 1901. В этом случае упрощается процесс производства за счет изготовление поршней 1601, 1701, 1801 и 1901 1401 и 1501 и корпусов 1601,1701,1801 и 1901 в одном процессе, таком как литье под давлением.
Специалистам в данной области техники понятно, что варианты установки возвратной пружины, показанные на фиг. 16, 17, 18 и 19, могут быть включены и в другие варианты выполнения механического привода согласно изобретению, в частности, в первый, второй, третий, четвертый и пятый варианты.
Предпочтительно возвратная пружина поршня может быть выполнена в виде насосной мембраны микронасоса.
На фиг. 20 показан пятый вариант выполнения механического привода согласно изобретению. Элементы привода согласно этому варианту по существу аналогичны элементам, описанным для третьего варианта выполнения привода, показанного на фиг. 6. Элементы привода согласно пятому варианту выполнения механического привода расположены таким образом, что до срабатывания привода возвратные пружины 2004, 2007 и 2005 находятся в напряженном состоянии, в которое они приводятся при сборке устройства. Напряжение возвратной пружины 2004 обеспечивает постоянный контакт поршня 2001 с рычагом 2004 и гарантирует, что при любом перемещении рычага 2004 происходит перемещение поршня 2001. Это повышает точность и стабильность механического привода. Напряженное состояние возвратной пружины 2007 обеспечивает постоянный контакт рычага 2004 с наклонной поверхностью клинообразного элемента 2002 и гарантирует, что при любом перемещении клинообразного элемента 2002 происходит перемещение рычага 2004. Это дополнительно повышает точность и стабильность механического привода. Напряженное состояние возвратной пружины 2005 обеспечивает поддержание сплава 2003 с эффектом памяти формы в напряженном состоянии и гарантирует, что его сжатие вызовет его перемещение. Это дополнительно повышает точность и стабильность срабатывания устройства. На фиг. 20 показан привод согласно пятому варианту осуществления изобретения в исходном положении. Клинообразный элемент 2002, рычаг 2004 и поршень 2001 находятся в первом положении. Сплав 2003 с эффектом памяти формы растянут, а возвратные пружины 2004, 2005 и 2007 находятся в соответствующих первых напряженных положениях. Кроме того, показан корпус 2006 механического привода 200.
На фиг. 21 показан привод согласно пятому варианту в состоянии после срабатывания, которое аналогично соответствующему состоянию привода по третьему варианту. Показаны поршень 2101, возвратные пружины 2104, 2105, 2107, клинообразный элемент 2102, сплав 2103 с эффектом памяти формы, рычаг 2104 и корпус 2106 привода.
Малогабаритный механический привод может быть использован в микронасосе, который показан на фиг. 22. У микронасоса 220 имеется насосная камера 2207, гидравлически связанная через входной клапан 2208 с резервуаром 2211. По меньшей мере один участок стенки насосной камеры является гибким, а поршень 2204 малогабаритного механического привода прикреплен к этому гибкому участку стенки насосной камеры. Предпочтительно гибкий участок стенки насосной камеры 2207 представляет собой возвратную пружину поршня 2204, как описано со ссылками на фиг. 16-19. Нагрев сплава 2202 с эффектом памяти формы вызывает его сжатие и перемещение клинообразного элемента 2201 из первого положения во второе. Это вызывает растяжение возвратной пружины 2205 на клинообразном элементе 2201 из первого положения во второе положение. Перемещаясь, клинообразный элемент 2201 смещает рычаг 2203 из первого положения во второе, который в свою очередь также смещает поршень 2204 из первого положения во второе. Рычаг 2203 соединен с корпусом через возвратную пружину 2212 и поворачивается вокруг неподвижной точки 2206 вращения. Перемещение поршня 2204 из первого положения во второе вызывает уменьшение объема насосной камеры 2207, вследствие чего жидкость выталкивается из насосной камеры 2207 через выпускной клапан 2209. При остывании сплав 2202 с эффектом памяти формы удлиняется и принимает начальную длину при помощи сжатия возвратной пружины 2205 на клинообразном элементе 2205 до начальной длины. Перемещение клинообразного элемента 2201 в первое положение позволяет рычагу 2203 также вернуться в первое положение под действием возвратной пружины 2212. Перемещение рычага 2203 в первое положение обеспечивает возврат поршня в первое положение под действием возвратной пружины поршня. Возврат поршня 2204 в первое положение увеличивает объем насосной камеры 2207 и обеспечивает поступление жидкости в насосную камеру 2207 из резервуара 2211 через впускной клапан 2208.
Клапаны 2208 и 2209 являются клапанами одностороннего действия. Выпускной клапан 2209 открывается при увеличении давления в насосной камере 2207 при перемещении поршня 2204 из первого положения во второе при уменьшении объема насосной камеры 2207. Впускной клапан 2208 закрывается, когда давление в насосной камере увеличивается. Когда насосная камера заполнена жидкостью, она частично выталкивается через выпускной клапан, когда поршень перемещается из первого положения во второе. Впускной клапан открывается, когда давление в насосной камере 2207 уменьшается при возврате поршня 2204 из второго положения в первое при увеличении объема насосной камеры 2207. Выпускной клапан 2209 закрывается, когда давление в насосной камере уменьшается. Таким образом, текучая среда частично всасывается из резервуара 2211 в насосную камеру 2207, когда поршень перемещается во второе положение из первого. Повторное срабатывание микронасоса 220 выкачивает жидкость из резервуара 2211 к выходу 2210. Для обеспечения всасывания жидкости из резервуара 2211 необходимо, чтобы этот резервуар находился под давлением.
Микронасос, описанный со ссылкой на фиг. 22, может найти применение в системах подачи лекарственных средств.
В качестве дополнительного описания механического привода, насоса и инфузионной системы впрыска согласно изобретению предлагаются следующие пункты:
Пункт 1
Малогабаритный механический привод, содержащий поршень, клинообразный элемент, постоянно контактирующий с поршнем и обеспечивающий его смещение, и сплав с эффектом памяти формы, соединенный с клинообразным элементом и выполненный с возможностью перемещения клинообразного элемента таким образом, что клинообразный элемент отклоняет поршень, причем в исходном положении сплав с эффектом памяти формы удерживается в предварительно напряженном состоянии.
Пункт 2
содержащий рычаг, установленный с возможностью вращения вокруг неподвижной точки; клинообразный элемент, постоянно контактирующий с рычагом в точке, расположенной на расстоянии от неподвижной точки вращения, для отклонения рычага вокруг неподвижной точки вращения; сплав с эффектом памяти формы, соединенный с клинообразным элементом для его перемещения таким образом, чтобы клинообразный элемент смещал поршень, причем сплав с эффектом памяти формы в исходном положении находится в предварительно напряженном состоянии; и наконечник поршня, постоянно контактирующий с рычагом в точке, расположенной на рычаге на расстоянии от неподвижной точки вращения этого рычага.
Пункт 3
Механический привод по пункту 1 или 2, в котором клинообразный элемент имеет единственную наклонную поверхность, взаимодействующую с поршнем или рычагом.
Пункт 4
Механический привод по пункту 1 или 2, в котором клинообразный элемент имеет две наклонные поверхности, функционально соединенные с поршнем или рычагом.
Пункт 5
Механический привод по пункту 3 или 4, в котором клинообразный элемент имеет поверхности с каждого конца каждой наклонной поверхности, которые по существу являются лежащими в плоскости перемещения клинообразного элемента.
Пункт 6
Механический привод по любому из предыдущих пунктов, в котором клинообразный элемент прикреплен к корпусу посредством упругих связей.
Пункт 7
Механический привод по любому из предыдущих пунктов, в котором сплав с эффектом памяти формы представляет собой проволоку.
Пункт 8
Механический привод по пункту 7, в котором проволока из сплава с эффектом памяти формы одним концом прикреплена к клинообразному элементу.
Пункт 9
Механический привод по пункту 7 или 8, в котором проволока из сплава с эффектом памяти формы обернута вокруг по меньшей мере части клинообразного элемента, а края этой проволоки прикреплены к неподвижным точкам.
Пункт 10
Механический привод по любому из пунктов 2-9, в котором точка привода поршня расположена относительно неподвижной точки вращения рычага и точки контакта клинообразного элемента с рычагом таким образом, чтобы обеспечить оптимальную точность перемещения поршня.
Пункт 11
Механический привод по любому из предыдущих пунктов, дополнительно содержащий возвратную пружину, соединенную с клинообразным элементом и противодействующую усилию от сплава с эффектом памяти формы.
Пункт 12
Механический привод по пункту 11, в котором возвратная пружина выполнена из эластомерного материала.
Пункт 13
Механический привод по пункту 11 или 12, в котором возвратная пружина изготовлена посредством литья или литья под давлением.
Пункт 14
Механический привод по любому из предыдущих пунктов, дополнительно содержащий возвратную пружину, соединенную с поршнем и перемещающую поршень в начальное положение.
Пункт 15.
Механический привод по пункту 14, в котором возвратная пружина поршня смещена, когда поршень находится в начальном положении.
Пункт 16.
Механический привод по пункту 14 или 15, в котором возвратная пружина представляет собой насосную мембрану микронасоса.
Пункт 17.
Механический привод по любому из пунктов 14-16, в котором возвратная пружина выполнена из эластомерного материала.
Пункт 18.
Механический привод по пункту 17, в котором возвратная пружина изготовлена при помощи литья или литья под давлением.
Пункт 19.
Механический привод по любому из предыдущих пунктов, дополнительно содержащий возвратную пружину, соединенную с рычагом, и перемещающую рычаг в начальное положение.
Пункт 20.
Механический привод по пункту 19, в котором возвратная пружина рычага смещена, когда рычаг находится в начальном положении.
Пункт 21.
Механический привод по пункту 19 или 20, в котором возвратная пружина выполнена из эластомерного материала.
Пункт 22.
Механический привод по пункту 21, в котором возвратная пружина изготовлена при помощи литья или литья под давлением.
Пункт 23.
Насос, содержащий малогабаритный механический привод по любому из предыдущих пунктов.
Пункт 24.
Насос по пункту 23 для перекачки жидких лекарственных средств, содержащий насосную камеру, имеющую впускной клапан и выпускной клапан, в котором объем насосной камеры изменяется за счет срабатывания малогабаритного механического привода.
Пункт 25. Инфузионная система, включающая в себя насос по любому из пунктов 23 или 24.
Специалистам в данной области техники понятно, что возможно выполнение различных модификаций настоящего изобретения, не выходящих за пределы его объема, который определен прилагаемой формулой изобретения.
Одноходовой клапан
Одноходовой клапан

