Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области электротехники и может быть использовано при организации безопасного и удобного способа складирования в автоматизированных системах обработки и хранения грузов (AS/RS), путем решения задачи локализации складских грузовых платформ в режиме реального времени внутри складских сооружений.
Особенность функционирования систем AS/RS сводится к тому, что работа складских грузовых платформ в штабелерах должна характеризоваться высокой динамической загруженностью, которая снижается при контроле перемещения складских грузовых платформ за счет:
- сокращения затрат на складское хранение;
- уменьшения времени, затрачиваемого на проведение всех складских операций;
- уменьшения количества ошибочных складских операций;
- повышения точности и оперативности учета товара;
- избежания потерь, связанных с критичностью сроков реализации товаров;
- уменьшения затрат на заработную плату складских работников.
Эффективное перемещение и складирование в автоматизированных системах обработки и хранения грузов - это исключительно важный фактор развития бизнеса. От качества работы на этом этапе зависит сохранность и скорость передвижения грузов, что приводит к снижению издержек на хранение, быстрый доступ ко всем ресурсам. В связи с этим контроль перемещения складских грузовых платформ, который является неотъемлемой частью технологического комплекса или транспортно-перегрузочного потока, оказывает существенное влияние на производительность и эффективность функционирования транспортных средств и производственного оборудования в целом.
Автоматический контроль перемещения складских грузовых платформ позволяет организовать:
- мнемосхему склада в реальном времени;
- автоматизацию процесса оформления документов;
- уникальный неизменяемый идентификатор, присваиваемый метке при производстве, что гарантирует высокую степень защиты от подделки;
- управление перемещением паллет по цепи поставки в реальном времени.
Эффективность контроля перемещения и складирования в автоматизированных системах обработки и хранения грузов в первую очередь определяется выбором системы координат1 (1 система координат - это совокупность выделенных точек, линий и поверхностей, с помощью которых определяется положение геометрических объектов в пространстве) описываемого пространства для перемещения складских грузовых платформ и типом первичного источника информации о перемещении складских грузовых платформ.
По виду описываемого пространства системы координат подразделяются на плоские и пространственные. По расположению осей координат относительно друг друга системы координат подразделяются на прямоугольные и косоугольные. Прямоугольные (или декартова) система координат в зависимости от направления координат подразделяется на правую и левую. Наиболее часто используется левая декартовая система, т.е. если смотреть в положительном направлении оси аппликат, то поворот оси ординат к оси абсцисс совершается по часовой стрелке. Криволинейная система координат в зависимости от вида осей координат подразделяется на полярную и ангулярную (угловую) систему координат.
Системы автоматического контроля перемещения складских грузовых платформ с декартовой системой координат наиболее просты и удобны для программирования, имеют весьма высокую точность позиционирования и большую грузоподъемность. Однако технологические возможности таких систем ограничены транспортированием и подачей объектов в зону обработки со сложными подходами, что приводит к значительному расширению производственных площадей.
Используемый в системах автоматического контроля перемещения складских грузовых платформ с декартовой системой координат двухкоординатный шаговый привод, обладая конструктивной пластичностью (гибкостью), позволяет создавать достаточно сложные гибкие системы. Данные системы сочетают в себе достоинства высокопроизводительных жестких роторно-конвейерных линий с достоинствами традиционных гибких производственных систем для точного воспроизведения взаимосвязанных движений, в которых совмещено управление транспортными операциями, которые обеспечивают интеграцию органов движения с перемещаемым объектом. Это исключает неоправданную избыточность, высокую стоимость, материалоемкость и, в конечном счете, приводит к экономической эффективности систем.
В настоящее время широкое применение получили системы автоматического контроля перемещения складских грузовых платформ с использованием радиочастотной идентификации (RFID-технология) [1], имеющие ряд преимуществ:
- RFID-метки могут перезаписываться и дополняться много раз;
- отсутствие необходимости RFID-считывателю в прямой видимости метки, чтобы считать ее данные;
- большое расстояние чтения (до нескольких сотен метров);
- большой объем хранения данных;
- поддержка чтения нескольких меток;
- считывание данных метки при любом ее расположении;
- устойчивость к воздействию окружающей среды;
- интеллектуальное поведение;
- высокая степень защиты меток от подделки.
Известен способ определения места хранения предмета с использованием радиочастотных меток [Патент RU №2378661, G01S 5/16, G08C 21/00, опубл. 10.01.2010], сводящийся к оснащению предмета и места хранения радиочастотными (RFID) метками, изменению положения антенны радиочастотного считывателя относительно упомянутых меток путем приближения или удаления, и на основании изменения сигналов радиочастотных меток, воспринимаемых считывателем, определяют место хранения предмета.
Недостатком данного способа является:
- сложность устройства контроля, которая определяется необходимостью организации N каналов радиосвязи с N точек контроля мест адресования складских грузовых платформ;
- относительно высокая стоимость меток, поэтому технология RFID еще достаточно дорога и не оправдывает вкладываемых в систему по данному способу средств;
- возможное экранирование при размещении на металлических поверхностях;
- подверженность систем радиочастотной идентификации помехам в виде электромагнитных полей от включенного оборудования, излучающего радиопомехи в диапазоне частот, используемом для работы RFID-системой;
- незащищенность радиочастотных идентификаторов от взлома;
- сложность самостоятельного изготовления, поскольку производство RFID-меток требует дополнительных ресурсов;
- недостаточная открытость выработанных стандартов.
Известна система автоматической идентификации и складирования контейнеров (складских грузовых платформ), оснащенных радиочастотными идентификационными метками, на стационарных и подвижных складах [Патент №2343100 RU, B65G 65/00, B61L 25/04, G01S 1/02, G01S 5/02, опубл. 10.01.2009], которая содержит установленные в диспетчерских пунктах складов вычислительные устройства удаленного и локального доступа, подъемно-транспортные механизмы, оснащенные датчиками и захватами контейнеров и считывателями радиочастотных идентификационных меток, причем каждое из локальных вычислительных устройств дополнено устройством беспроводной цифровой связи по радиоканалу, а каждый подъемно-транспортный механизм снабжен локальным вычислительным устройством и устройством регистрации уровня позиционирования контейнера по вертикали, а каждый из захватов подъемно-транспортных механизмов укомплектован датчиками позиционирования контейнера по горизонтали и вертикали, датчиком ускорения движения захвата и локальным вычислительным устройством, все локальные вычислительные устройства диспетчерских пунктов стационарных и подвижных складов, подъемно-транспортных механизмов и захватов взаимосвязаны и синхронизированы по беспроводным радиоканалам, осуществляющим передачу в базу данных вычислительных устройств удаленного доступа диспетчерских пунктов, передачу информации о координатах позиционирования контейнеров на складах по горизонтали и вертикали через устойчиво взаимодействующую в каждый текущий момент времени произвольную последовательность связанных по радиоканалу локальных вычислительных устройств.
Недостатком известной системы является:
- сложность устройства контроля, которая определяется необходимостью организации N каналов радиосвязи с N точек контроля мест адресования складских грузовых платформ;
- сложность устройства контроля приводит также к низкой достоверности результатов контроля из-за отсутствия самоконтроля самого устройства контроля;
- относительно высокая стоимость меток, поэтому технология RFID еще достаточно дорога и не оправдывает вкладываемых в систему средств;
- возможное экранирование при размещении на металлических поверхностях;
- подверженность систем радиочастотной идентификации помехам в виде электромагнитных полей от включенного оборудования, излучающего радиопомехи в диапазоне частот, используемом для работы RFID-системой;
- незащищенность радиочастотных идентификаторов от взлома;
- сложность самостоятельного изготовления, поскольку производство RFID-меток требует дополнительных ресурсов;
- недостаточная открытость выработанных стандартов.
Наиболее близким техническим решением к изобретению (прототипом) является способ автоматического контроля перемещения складских грузовых платформ [Патент №2470316 RU, G01S 5/00, опубл. 20.12.2012], сводящийся к обработке информации результатов контроля в N контрольных точках, для чего разбивают складское помещение на зоны размещения складских грузовых платформ, в этих зонах задают контрольные точки присутствия складских грузовых платформ, которые последовательно нумеруют, масштабируют токи от каждой контрольной точки с коэффициентом масштабирования от каждой контрольной точки пропорционально номеру контрольной точки i, масштабированные токи от каждой контрольной точки суммируют в точке суммирования и передают через канал связи в орган обработки информации, где преобразуют данный ток в пропорциональное напряжение, из которого вычитается напряжение, пропорциональное суммарным координатам уже размещенных в помещении склада складских грузовых платформ, и по величине результирующего напряжения идентифицируют координату положения складской грузовой платформы в линейной системе координат, фиксируют координату окончательного размещения в помещении склада платформы и суммируют ее с суммой, а при отгрузке вычитают из суммы координат ранее окончательно размещенных складских грузовых платформ и далее переходят от линейной системы координат к двухкоординатной системе с абсциссой X, равной

и ординатой Y, равной
где i - координата в линейной системе координат (порядковый номер точки контроля), n - количество зон размещения складских грузовых платформ по оси ординат в контролируемом помещении,  - целая часть результата деления.
- целая часть результата деления.
Недостатки способа-аналога устраняются устройством-прототипом, однако способ-прототип характеризуется следующими недостатками:
- низкая точность регистрации местоположения платформ;
- узкий диапазон ориентирования платформ.
Данные недостатки определяются тем, что в данных системах обычно используют двухкоординатные привода, недостатком системы использующих их является малая производительность при обработке контуров сложной формы, поскольку один из координатных приводов, работающий в режиме регулирования скорости, является всегда ведущим и при высоких скоростях подачи при обработке отдельных участков контура возможно появление значительных динамических ошибок, обусловленных инерционностью или насыщением ведомого привода, а так как система управления работает в реальном масштабе времени, необходимо устанавливать заведомо малую для всего участка в целом скорость подачи.
С другой стороны при переходе от i к i+1 состоянию (по горизонтали) платформ в системе по способу-прототипу перекрывается диапазон 2n состояний, и при этом согласно формуле из [2] возможен бросок тока на выходе блока масштабирования от I0 (состояние 1) до I0[2n(2n+1)] (состояние 2 по горизонтали), что требует в данной системе органа обработки информации с широким динамическим диапазоном. Если использовать двухкоординатную систему регистрации платформ, то предельное изменение входного тока для органа обработки информации от I0 до I0[n(n+1)], т.е. изменения тока в более чем четыре раза меньше, что уменьшает динамические погрешности по регистрации положения платформ.
Наиболее близким техническим решением к изобретению (прототипом) является устройство автоматического контроля перемещения складских грузовых платформ [Патент №2470316 RU, G01S 5/00, опубл. 20.12.2012], содержащее блок N дискретных датчиков релейного типа, размещенных в N контрольных точках и орган обработки информационных сигналов, вход которого подключен к выходу канала связи, а также блок суммирования масштабированных токов с коэффициентом масштабирования по каждому входу, пропорциональным номеру этого входа, причем i-й вход блока суммирования масштабированных токов подключен к выходу i-го датчика, а выход блока суммирования масштабированных токов соединен с входом канала связи, орган обработки информации, блок преобразования тока в напряжение, вычитатель, аналого-цифровой преобразователь (АЦП), вычислитель, блок памяти, цифро-аналоговый преобразователь (ЦАП), пороговый элемент, R-S триггер, одновибратор и два элемента задержки сигнала, причем вход органа обработки информации соединен с входом блока преобразования тока в напряжение, выход которого соединен с первым входом вычитателя, ко второму входу которого подключен выход ЦАП, а выход к входу АЦП, информационные выходы которого подключены к первым информационным входам вычислителя, первые управляющие выходы которого являются выходами управления платформой всего устройства, а первые и вторые информационные выходы соединены с первыми и вторыми информационными входами блока памяти соответственно, третьи информационные выходы вычислителя являются первыми информационными входами мнемосхемы склада, ко вторым информационным входам которого подключены первые информационные выходы блока памяти, вторые информационные выходы которого подключены к информационным входам ЦАП и вторым информационным входам вычислителя, третьи информационные входы которого подключены к выходам пульта оператора, выход вычитателя подключен через пороговый элемент, S-вход R-S триггера, одновибратор и первый элемент задержки сигнала к входу стробирования АЦП, который соединен с R-входом R-S триггера и через второй элемент задержки сигнала с входом стробирования вычислителя, а второй и третий управляющие выходы последнего соединены с соответствующими входами "ЗАПИСЬ" блока памяти, причем в устройстве автоматического контроля перемещения складских грузовых платформ блок суммирования масштабированных токов состоит из N резисторов и величина i-го резистора обратно пропорциональна его номеру i, первый конец i-го резистора подключен к i-му входу блока суммирования токов, а вторые концы всех резисторов блока суммирования токов объединены и подключены к его выходу.
Недостатки способа-аналога устраняются устройством-прототипом, однако способ-прототип характеризуется следующими недостатками:
- низкая точность регистрации местоположения платформ;
- узкий диапазон ориентирования платформ.
Данные недостатки определяются тем, что в данных системах обычно используют двухкоординатные привода, недостатком системы, использующей их, является малая производительность при обработке контуров сложной формы, поскольку один из координатных приводов, работающий в режиме регулирования скорости, является всегда ведущим и при высоких скоростях подачи при обработке отдельных участков контура возможно появление значительных динамических ошибок, обусловленных инерционностью или насыщением ведомого привода, а так как система управления работает в реальном масштабе времени, необходимо устанавливать заведомо малую для всего участка в целом скорость подачи.
С другой стороны при переходе от i к i+1 состоянию (по горизонтали) платформ в системе по способу-прототипу перекрывается диапазон 2n состояний, и при этом согласно формуле из [2] возможен бросок тока на выходе блока масштабирования от I0 (состояние 1) до I0[2n(2n+1)] (состояние 2 по горизонтали), что требует в данной системе органа обработки информации с широким динамическим диапазоном. Если использовать двухкоординатную систему регистрации платформ, то предельное изменение входного тока для органа обработки информации от I0 до I0[n(n+1)] (согласно той же формулы из [2]), т.е. изменения тока в более чем четыре раза меньше, что уменьшает динамические погрешности по регистрации положения платформ.
Практически во всех областях промышленной индустрии используются различные модели горизонтальных и вертикальных конвейерных систем карусельного типа грузовых платформ и автопогрузчиков с вертикальным подъемом. Однако до недавнего времени транспортно-перегрузочный процесс относили к вспомогательным, придавая ему второстепенное значение, и там, где возможно, старались обойтись без автоматизации грузовых платформ. Теперь, когда все чаще грузовые платформы становятся неотъемлемой частью системы автоматизированных машин, отношение к автоматизации грузовых платформ меняется. Причем повышение производительности основного оборудования требует повышения производительности грузовых платформ.
Технической задачей, решаемой изобретением, является увеличение производительности и надежности грузовых платформ в AS/RS системах за счет локализации объектов в режиме реального времени внутри складских сооружений. Решение данной задачи позволит использовать грузовые платформы для работы в автоматическом цикле в составе гибких производственных систем.
В связи с этим особенностью данного решения является то, что при организации передачи информации от контрольной точки о присутствии складских грузовых платформ в соответствующей зоне размещения (адресования) в контролируемом помещении в орган обработки информации результатов контроля в предлагаемом устройстве автоматического контроля перемещения складских грузовых платформ используется one-wire технология.
Для решения данной задачи в способе автоматического контроля перемещения складских грузовых платформ, сводящемся к обработке информации результатов контроля в N контрольных точках, для чего разбивают складское помещение на зоны размещения складских грузовых платформ, в этих зонах задают контрольные точки присутствия складских грузовых платформ, которые последовательно нумеруют, масштабируют токи от каждой контрольной точки с коэффициентом масштабирования от каждой контрольной точки пропорционально номеру контрольной точки, масштабированные токи от каждой контрольной точки суммируют в точке суммирования и передают через канал связи в орган обработки информации, где преобразуют данный ток в пропорциональное напряжение, из которого вычитается напряжение, пропорциональное суммарным координатам уже размещенных в помещении склада складских грузовых платформ, и по величине результирующего напряжения идентифицируют координату положения складской грузовой платформы, фиксируют координату окончательного размещения в помещении склада платформы и суммируют ее с суммой, а при отгрузке вычитают из суммы координат ранее окончательно размещенных складских грузовых платформ, нумерацию последовательно контрольных точек осуществляют последовательно двуиндексным номером путем присвоения индекса номера  по группам параллельно включенных дискретных датчиков присутствия складских грузовых платформ от 1 до m
по группам параллельно включенных дискретных датчиков присутствия складских грузовых платформ от 1 до m  , а также присваивают индекс номера k каждой из групп параллельно включенных дискретных датчиков положения присутствия складских грузовых платформ от 1 до n
, а также присваивают индекс номера k каждой из групп параллельно включенных дискретных датчиков положения присутствия складских грузовых платформ от 1 до n  , причем
, причем
m×n=N,
где N - количество контрольных точек,
при масштабировании токов от каждой контрольной точки присутствия складских грузовых платформ выбирают коэффициент масштабирования тока от каждой контрольной точки равным  , а в органе обработки информации путем перебора а вычисляют частные решения выражения
, а в органе обработки информации путем перебора а вычисляют частные решения выражения
 ,
,
где  ,
,  ,
,
для второго индекса номера в виде

и первого индекса

до обнаружения целочисленных решений k и  .
.
Устройство автоматического контроля перемещения складских грузовых платформ содержит блок n дискретных датчиков релейного типа, размещенных в n контрольных точках, входы блока суммирования масштабированных токов подключены к выходам соответствующего датчика блока дискретных датчиков релейного типа, блок суммирования масштабированных токов для обеспечения коэффициента масштабирования пропорциональным номеру по каждому входу состоит из n резисторов, величина i-го резистора обратно пропорциональна его номеру i, первый конец i-го резистора подключен к i-му входу блока суммирования токов, который подключен к выходу i-го датчика, а вторые концы всех резисторов блока суммирования токов объединены и подключены к его выходу, который соединен с входом канала связи, выход канала связи подключен к входу органа обработки информации, причем орган обработки информации содержит блок преобразования тока в напряжение, первый вычитатель, формирователь импульсов, элемент задержки импульсов, блок аналого-цифровых преобразователей, вычислитель, блок памяти и цифро-аналоговый преобразователь, вход органа обработки информации соединен с входом блока преобразования тока в напряжение, выход которого соединен с первым входом первого вычитателя, выход формирователя импульсов соединен через элемент задержки импульсов с входом синхронизации аналого-цифрового преобразователя, первые и вторые информационные выходы которого, а также его выход управления соединены соответственно с первыми, вторыми информационными входами и входом управления вычислителями, первые информационные выходы которого соединены с информационными входами блока памяти, а первый выход управления вычислителя соединен с входом "ЗАПИСЬ" блока памяти, вторые информационные выходы и второй выход управления вычислителя подключены соответственно к информационным выходам и выходу управления органа обработки информации и к выходу устройства автоматического контроля перемещения складских грузовых платформ мнемосхем склада, третьи информационные выходы и третий выход управления вычислителя подключены соответственно к информационным выходам и выходу управления платформами органа обработки информации и устройства автоматического контроля перемещения складских грузовых платформ, информационные выходы блока памяти соединены с третьими информационными входами вычислителя и через цифро-аналоговый преобразователь со вторым входом первого вычитателя, в устройство автоматического контроля перемещения складских грузовых платформ введено дополнительно m-1 блока дискретных датчиков релейного типа, размещенных в контрольных точках, с блоками суммирования масштабированных токов, так чтобы m×n=N, где N - общее количество контрольных точек, причем напряжение питания дополнительных блоков суммирования масштабированных токов пропорционально напряжению питания первого блока суммирования масштабированных токов с коэффициентом пропорциональности, равным номеру блока дискретных датчиков релейного типа, а в орган обработки информации дополнительно введены первый и второй квадраторы, первый и второй сумматоры, блок извлечения квадратного корня, первое и второе устройства округления, умножитель на два, умножитель, второй и третий вычитатели, нуль-орган, блок задания напряжения, причем выходы первого и второго квадраторов соединены с первыми входами соответственно первого сумматора и второго вычитателя, вход блока задания напряжения подключен к выходу нуль-органа и входу формирователя импульсов, первый вход второго сумматора соединен с выходом первого устройства округления до целого числа, а второй вход с выходом второго устройства округления до целого числа, а выход второго сумматора подключен к входу второго квадратора, к первым входам умножителя и третьего вычитателя и к аналоговому входу аналого-цифрового преобразователя, выход третьего вычитателя соединен с аналоговым входом k аналого-цифрового преобразователя, вход первого устройства округления до целого числа подключен через блок извлечения квадратного корня к выходу первого сумматора, второй вход которого соединен с выходом первого вычитателя и с первым входом нуль-органа, подключенного вторым входом к выходу второго вычитателя, вход второго устройства округления до целого числа соединен с выходом блока задания напряжения, а его выход подключен к входу первого квадратора и через умножитель на два присоединен ко вторым входам третьего вычитателя и умножителя, выход которого подключен ко второму входу второго вычитателя.
Для определения сомножителей произведения двух целых положительных чисел k и преобразуем произведение в виде
 ,
,
где  ;
;  , т.е.
, т.е.  и
и  .
.
Поскольку x=y-2а и, приняв  , получаем квадратное уравнение
, получаем квадратное уравнение
 ,
,
для которого каноническая форма имеет вид
 ,
,
где  , т.е.
, т.е.
при  , k от 1 до n параметр а представлен рядом: 0,
, k от 1 до n параметр а представлен рядом: 0,  , -1,
, -1,  , …,
, …,  ,
,  ;
;
при  , k от 1 до n параметр а представлен рядом:
, k от 1 до n параметр а представлен рядом:  , 0,
, 0,  , -1,
, -1,  , …,
, …,  ,
,  ;
;

при  , k от 1 до n параметр а представлен рядом:
, k от 1 до n параметр а представлен рядом:  ,
,  , …,
, …,  ,
,  ;
;
при  , k от 1 до n параметр а представлен рядом:
, k от 1 до n параметр а представлен рядом:  ,
,  , …,
, …,  ,
,  .
.
Анализ данного выражения при различных значениях а и фиксированном значении F показывает, что целочисленное решение возможно в двух случаях.
Простейшее решение данного уравнения имеет вид
 ; k=1 при
; k=1 при 
и общее решение данного квадратного уравнения
 .
.
Но поскольку целое положительное число, то единственное частное решение имеет вид
 .
.
При этом первый индекс номера получается из выражения
 .
.
Для определения коэффициентов масштабирования блока суммирования масштабированных токов воспользуемся схемой замещения группы параллельных ветвей с источником одной ветвью фиг. 2
 при
при  .
.
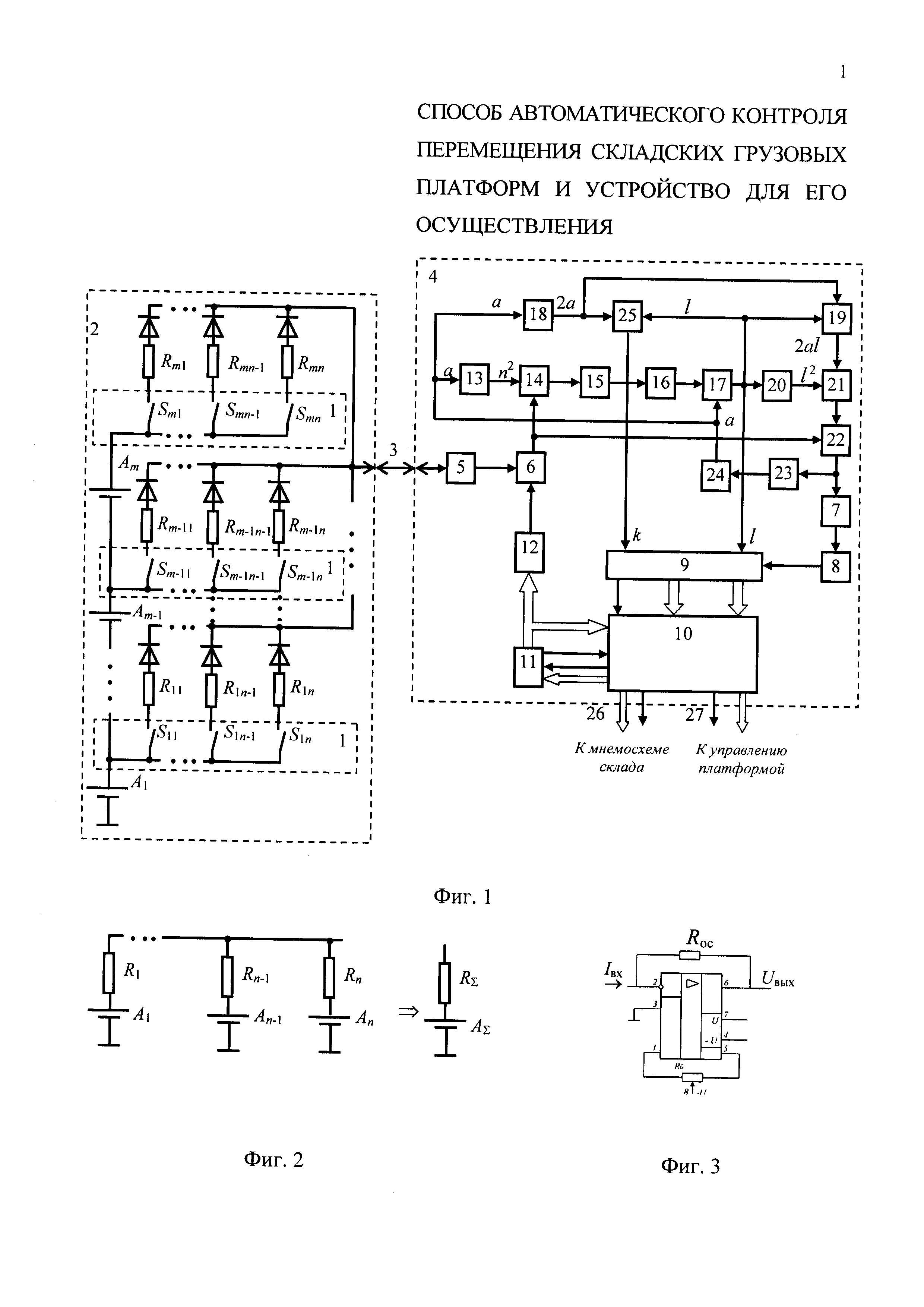
На фиг. 1 представлена принципиальная блок-схема одного из возможных вариантов устройства реализации предлагаемого способа, где дискретные датчики положения выполнены на герконах Д1, Д2, …, ДN и смонтированы на местах размещения, которые срабатывают от постоянных магнитов, установленных на складских грузовых платформах.
На фиг. 2 приведены выделенные зоны размещения складских грузовых платформ и возможная траектория движения складской грузовой платформы.
На фиг. 3 приведен пример реализации преобразователя ток-напряжение на инвертирующем усилителе.
Устройство для контроля складского помещения содержит блок N дискретных датчиков положения 1 (релейного типа), которые определяют контрольные точки присутствия складских грузовых платформ в соответствующей зоне размещения в контролируемом помещении, блок масштабирования и суммирования токов 2, канал связи 3, орган обработки информации 4. Орган обработки информации 4, в свою очередь, включает блок преобразования тока в напряжение 5, первый вычитатель 6, формирователь импульсов 7, элемент задержки импульсов 8, блок аналого-цифровых преобразователей 9, вычислитель 10, блок памяти 11, цифро-аналоговый преобразователь 12, первый квадратор 13, первый сумматор 14, блок извлечения квадратного корня 15, первое устройство округления 16, второй сумматор 17, умножитель на два 18, умножитель 19, второй квадратор 20, второй вычитатель 21, нуль-орган 22, блок задания напряжения 23, второе устройство округления 24, третий вычитатель 25, выход к мнемосхеме склада 26 и выход управления платформой склада 27.
Устройство автоматического контроля перемещения складских грузовых платформ содержит m блоков по n дискретных датчиков релейного типа 1, размещенных в N=n×m контрольных точках. Входы блока суммирования масштабированных токов 2 подключены к выходам соответствующего датчика блока дискретных датчиков 1 релейного типа. Блок суммирования масштабированных токов 2 для обеспечения коэффициента масштабирования пропорциональным номеру по каждому входу состоит из n резисторов. Величина i-го резистора обратно пропорциональна его номеру i, первый конец i-го резистора подключен к i-му входу блока суммирования токов, который подключен к выходу i-го датчика, а вторые концы всех резисторов блока суммирования токов объединены и подключены к его выходу, который соединен с входом канала связи 3. Выход канала связи 3 подключен к входу органа обработки информации 4.
Вход органа обработки информации 4 соединен с входом блока преобразования тока в напряжение 5. Выход блока преобразования тока в напряжение 5 соединен с первым входом первого вычитателя 6.
Первые и вторые информационные выходы аналого-цифрового преобразователя 9, а также его выход управления соединены соответственно с первыми, вторыми информационными входами и входом управления вычислителями 10. Первые информационные выходы вычислителя 10 соединены с информационными входами блока памяти 11, а первый выход управления вычислителя 10 соединен с входом "ЗАПИСЬ" блока памяти 11. Вторые информационные выходы и второй выход управления вычислителя 10 подключены соответственно к информационным выходам и выходу управления органа обработки информации 4 и к выходу устройства автоматического контроля перемещения складских грузовых платформ мнемосхем склада 26. Третьи информационные выходы и третий выход управления вычислителя 10 подключены соответственно к информационным выходам и выходу управления органа обработки информации 4 и устройства автоматического контроля перемещения складских грузовых платформ 27.
Информационные выходы блока памяти 11 соединены третьими информационными входами вычислителя 10 и через цифро-аналоговый преобразователь 12 со вторым входом первого вычитателя 6.
Кроме этого в органе обработки информации 4 выходы первого 13 и второго 20 квадраторов соединены с первыми входами соответственно первого сумматора 14 и второго вычитателя 21. Вход блока задания напряжения 23 подключен к выходу нуль-органа 22 и через последовательно соединенный формирователь импульсов 7 и элемент задержки импульсов 8 к входу синхронизации аналого-цифрового преобразователя 9. Первый вход второго сумматора 17 соединен с выходом первого 16, а второй вход с выходом второго 24 устройства округления до целого числа, а выход второго сумматора 17 подключен к входу второго 20 квадратора, к первым входам умножителя 19 и третьего вычитателя 25 и к аналоговому входу аналого-цифрового преобразователя 9. Выход третьего вычитателя 25 соединен с аналоговым входом k аналого-цифрового преобразователя 9. Вход первого устройства округления 16 до целого числа подключен через блок извлечения квадратного корня 15 к выходу первого сумматора 14. Второй вход первого сумматора 14 соединен с выходом первого вычитателя 6 и с первым входом нуль-органа 22, подключенного вторым входом к выходу второго вычитателя 21. Вход второго устройства округления 24 до целого числа соединен с выходом блока задания напряжения 23, а его выход подключен к входу первого квадратора 13 и через умножитель на два 18 присоединен ко вторым входам третьего вычитателя 25 и умножителя 19. Выход умножителя 19 подключен ко второму входу второго вычитателя 21.
Блок дискретных датчиков 1 релейного типа может быть реализован в виде герконовых датчиков положения, которые смонтированы на местах адресования, а постоянный магнит на складских грузовых платформах. Блок преобразования тока в напряжение 5 может быть реализован в простейшем случае в виде резистора нагрузки для канала связи 3, приведенного на фиг. 1, а канал связи 3 в виде токовой витой пары.
Вычислитель 10 может быть реализован в виде компьютера, для которого мнемосхема склада отображается на его дисплее. В вычислителе 10 пультом оператора (клавиатура компьютера) вводятся координаты места адресования и жесткая логическая схема управления перемещением платформы от текущего места адресования к следующему.
Преобразователь ток-напряжение 5 может быть выполнен на инвертирующем усилителе (фиг. 3), выходное напряжение которого пропорционально входному току, умноженному на сопротивление резистора обратной связи Roc
Uвых=-IвхRос.
В связи с этим коэффициент преобразования преобразователя ток-напряжение
KI/U=Uвых/Iвх=Roc.
Знак "-" для инвертирующего усилителя в данном выражении опущен, поскольку он не является определяющим для рассматриваемой задачи.
Коэффициент преобразования ток-напряжения цифро-аналогового преобразователя 12, чтобы минимизировать погрешность результата вычитания на первом вычитателе 6 напряжений с выхода цифро-аналогового преобразователя 12 и преобразователя ток-напряжение 5, выбирается равным коэффициенту преобразования ток-напряжение KI/U преобразователя ток-напряжение 5.
Первое 16 и второе 24 устройства округления выполняют математическую операцию округление результата, которая позволяет уменьшить количество знаков в числе за счет замены числа его приближенным значением с определенной точностью. Так при округлении к ближайшему целому (англ. rounding) число округляется до заданного целого числа, модуль разности с которым у этого числа минимален. Данные целые числа могут формироваться программно или аппаратно, в данном случае, блоком задания напряжения 23 в виде напряжения дискретных целых чисел, который может быть реализован:
1. для цифровой реализации в виде [Авторское свидетельство СССР №398949, кл. G06F 7/52, 1974; Воеводин. Вычислительные основы линейной алгебры. Наука, 1977, с. 16; Ю.П. Журавлев. Системное проектирование управляющих ЦВМ. М: Сов радио, 1974, с. 165; Авторское свидетельство СССР №951305, кл. G06F 7/72, 1982];
2. для аналоговой реализации в виде АЦП с шагом квантования, равным единице счета для целого числа, в котором при квантовании аналогового сигнала на каждом этапе осуществляется переход к ближайшему уровню квантования [Тулин И.А. Схемотехника ЮНИТА 3 - Основы аналоговой интегральной схемотехники. Цифро-аналоговые и аналого-цифровые преобразователи. - М.: Логос, 2010. - С. 75].
В исходном состоянии нумеруют последовательно датчики блока дискретных датчиков Д1, Д2, …, ДN (герконовые датчики положения смонтированы на местах адресования, а постоянный магнит на складской грузовой платформе). В блоке суммирования масштабированных токов 2 от каждого дискретного датчика определяются токи  пропорционально номеру
пропорционально номеру  датчика
датчика
 ,
,
где - индекс порядкового номера группы, где сработал датчик, k - индекс порядкового номера сработавшего датчика в группе, E0 - напряжение источника напряжения, а I1 - ток от первого датчика Д1.
При включении устройства и поступлении в помещение склада складской грузовой платформы в точке суммирования S1 суммируются токи от датчиков Д1, Д2, …, ДN
 ,
,
а поскольку напряжение в группах по уровням меняется в зависимости от номера в группе последовательных элементов, а ток от группы к группе меняется, изменяя масштабируемое сопротивление обратно пропорционально с коэффициентом k, то
 .
.
На начальном этапе функционирования устройства, когда еще отсутствуют установленные в помещении склада платформы в конечных координатах места адресования, поскольку по помещению склада перемещается одна складская грузовая платформа, суммарный ток будет равен
 .
.
Суммарный ток I∑ по однопроводному каналу связи 3 поступает в орган обработки информации 4, где в блоке преобразования тока в напряжение 5 преобразуют в пропорциональное напряжение
U∑=KI/UI∑=RocI∑,
где Rос - сопротивление резистора обратной связи преобразователя ток-напряжение,
KI/U - коэффициент преобразования преобразователя ток-напряжение.
Орган обработки информации 4 работает на основе перебора частных решений до тех пор, пока среди них не обнаружен случай целочисленного решения. Для этого находят частные решения при а до тех пор, пока не получим целочисленные значения y и x.
На первом квадраторе 13 и первом сумматоре 14 реализуется выражение
 .
.
На начальном этапе функционирования устройства, поскольку к первому сумматору 14 поступает только напряжение U∑, промасштабированное в целочисленном выражении, а а равно нулю, блок извлечения квадратного корня 15 извлекает из числа U∑ квадратный корень. Поскольку после округления результата извлечения до целого числа первым устройством округления 16 на втором входе второго сумматора 17 напряжение, соответствующее значению а, пока отсутствует, то на выходе второго квадратора 20 напряжение равно целому числу  от
от  . На выходе умножителя 19 напряжения отсутствует
. На выходе умножителя 19 напряжения отсутствует  , а на выходе второго квадратора 20 формируется напряжение
, а на выходе второго квадратора 20 формируется напряжение  .
.
Нуль-орган 22 сравнивает результат вычисления числа  при a=0 с измеренным числом U∑ и устанавливает, что эти числа не равны. После этого блок управления 23 выдает калиброванные по величине напряжения, соответствующие а до тех пор, пока нуль-орган 22 не установит, что число U∑, подведенное к его входу, не равно значению
при a=0 с измеренным числом U∑ и устанавливает, что эти числа не равны. После этого блок управления 23 выдает калиброванные по величине напряжения, соответствующие а до тех пор, пока нуль-орган 22 не установит, что число U∑, подведенное к его входу, не равно значению
 .
.
Напряжение, соответствующее , формируется по результатам простых арифметических действий на выходе сумматора 17
 ,
,
а напряжение, соответствующее x, согласно выражению

на выходе третьего вычитателя 25.
При равенстве напряжения U∑, которое подведено к первому входу ноль-органа 22, значению напряжения  на втором входе ноль-орган 22 срабатывает. Данный импульс с выхода ноль-органа 22, сформированный формирователем импульсов 7, и элемент задержки импульса 8 поступает на вход синхронизации блока аналого-цифровых преобразователей 9, на информационные входы которого поступают выделенные индексы номера сработавшего дискретного датчика. С информационных выходов блока аналого-цифровых преобразователей 9 по импульсу с его выхода управления на вход синхронизации вычислителя 10 в него поступает информация об индексах номера сработавшего дискретного датчика. В вычислителе 10 определяется код суммы токов от сработавших датчиков от установленных на свои места платформ
на втором входе ноль-орган 22 срабатывает. Данный импульс с выхода ноль-органа 22, сформированный формирователем импульсов 7, и элемент задержки импульса 8 поступает на вход синхронизации блока аналого-цифровых преобразователей 9, на информационные входы которого поступают выделенные индексы номера сработавшего дискретного датчика. С информационных выходов блока аналого-цифровых преобразователей 9 по импульсу с его выхода управления на вход синхронизации вычислителя 10 в него поступает информация об индексах номера сработавшего дискретного датчика. В вычислителе 10 определяется код суммы токов от сработавших датчиков от установленных на свои места платформ
 ,
,
где n0 - первый индекс номера множества установленных на свои места платформ; m0 - второй индекс номера множества установленных на свои места платформ.
Данный код поступает на информационные входы блока памяти 11, а по выходному импульсу от вычислителя 10 по синхронизирующему входу записывается в нем.
Данный код суммы токов от сработавших датчиков от установленных на свои места платформы, характеризующий суммарные данные о координатах конечного размещения складских грузовых платформ в помещении склада, через цифро-аналоговый преобразователь 12 поступает на второй вход первого вычитателя 6 и вычитается из напряжения, полученного по первому входу с выхода преобразователя тока в напряжение 5, т.е. на выходе первого вычитателя 6 формируется напряжение, пропорциональное лишь коду перемещающейся по складу складской грузовой платформы.
Таким образом, в устройстве по однопроводному каналу связи 3 поступает информация о координате складской грузовой платформы. При получении информации от дискретного датчика места адресования, размещенного в N контрольных точках на входах вычислителя 10, формируется двухиндексный номер в системе координат для принятия решения о текущей координате складской грузовой платформы.
При достижении складской грузовой платформой координаты конечного ее размещения, т.е. при совпадении текущей координаты платформы с заданной в вычислителе 10 ее конечной координатой перемещения по помещению склада формируется от вычислителя 10 сигнал по входу "ЗАПИСЬ" блока памяти 11, в который заносится координата конечного размещения платформы, где информация о координате и накапливается. Накопленная в блоке памяти 11 информация используется для последующих расчетов в вычислителе 10 при формировании алгоритма управления перемещением очередной складской грузовой платформы по цепи поставки от текущего места адресования к следующему в реальном времени.
Таким образом, в вычислителе 10 определяется информация в двухкоординатной системе о положении складских грузовых платформ для формирования мнемосхемы склада в реальном времени, с учетом как перемещающейся к заданной зоне адресации складской грузовой платформы (на выходе вычислителя 10), так и складских грузовых платформ, размещенных в зоне конечной адресации, накапливаемой в блоке памяти 11. Кроме этого при полном заполнении помещения склада на выходе блока памяти 11 формируется сигнал об этом. Данная информация передается на мнемосхему склада (в дисплей компьютера) по информационным выходам "К мнемосхеме склада".
С учетом полученной мнемосхемы склада в вычислителе 10 на основании внесенной в него жесткой логической схемы управления перемещением платформы по управляющему выходу "К управлению платформой" формируется алгоритм управления перемещением очередной складской грузовой платформы по цепи поставки от текущего места адресования к следующему в реальном времени.
При переходе к этапу отгрузки платформ функционирование предлагаемого устройства осуществляется аналогично с той только разницей, что при старте алгоритма на отгрузку складской грузовой платформы в вычислителе 10 из суммарной координаты вычитается начальная координата отгружаемой складской грузовой платформы.
Используемая литература
1. Финкенцеллер К. RFID-технологии. Справочное пособие / К. Финкенцеллер; пер. с нем. Сойунханова Н.М. - М.: Додэка-XXI, 2010. - 496 с.
2. Градштейн И.С., Рыжик И.М. Таблицы интегралов, сумм, рядов и произведений. М.: Государственное изд-во физико-математической литературы, 1963. - С. 15, формула 0.121.1.

Способ автоматического контроля технического состояния элементов параллельной аккумуляторной батареи и устройство для его осуществления
Способ защиты объекта радиосвязи от радионаводимого высокоточного оружия и система его реализации
Способ детектирования параметров синусоидального сигнала
Устройство для синхронизации параметров подключаемых на параллельную работу генераторов
Способ автоматического контроля технического состояния элементов последовательной аккумуляторной батареи и устройство для его осуществления
Способ автоматического контроля технического состояния элементов параллельной аккумуляторной батареи и устройство для его осуществления
Способ автоматического контроля перемещения складских грузовых платформ и устройство для его осуществления
Способ автоматической кластеризации объектов
Способ частотной модуляции колебаний и устройство для его осуществления
Способ газификации низкореакционных твердых топлив
Способ автоматического контроля технического состояния элементов параллельной аккумуляторной батареи и устройство для его осуществления
Способ защиты объекта радиосвязи от радионаводимого высокоточного оружия и система его реализации
Способ детектирования параметров синусоидального сигнала
Устройство для синхронизации параметров подключаемых на параллельную работу генераторов
Способ автоматического контроля технического состояния элементов последовательной аккумуляторной батареи и устройство для его осуществления
Способ автоматического контроля технического состояния элементов параллельной аккумуляторной батареи и устройство для его осуществления
Способ автоматического контроля перемещения складских грузовых платформ и устройство для его осуществления
Способ автоматической кластеризации объектов
Способ частотной модуляции колебаний и устройство для его осуществления
Способ газификации низкореакционных твердых топлив

