Результат интеллектуальной деятельности: Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья
Вид РИД
Изобретение
Изобретение относится к навигационно-гидрографическому обеспечению Военно-Морского Флота, а именно к навигационно-гидрографическому обеспечению высадки морского десанта, где предлагается в существующий способ навигационно-гидрографического обеспечения высадки морского десанта внести существенные изменения, заключающиеся в установке на побережье противника роботизированного створного знака вместо обслуживаемых створных знаков.
Известен способ обеспечения навигационной безопасности мореплавания [1], в котором предлагается для ориентирования кораблей и судов использовать систему, состоящую из двух лазерных маяков и блока управления (сканирования лазерных лучей). Система позволяет определять величину и знак линейного смещения судна от осевой линии фарватера, а также дальность до лазерного маяка на основе данных об угловом положении в горизонтальной плоскости лазерных лучей и номере лазерного маяка, содержащихся в модулированных лазерных лучах.
Известен также способ проводки морских и речных судов по заданному курсу [2], который заключается в одновременном совместном использовании оптических сигналов от створного лазерного маяка и навигационной информации от спутниковой навигационной системы для проводки судна как на этапе приближения к пункту назначения, так и при проводке его по фарватеру. При этом створный лазерный маяк формирует в пространстве три трехмерные области, заполненные лазерным излучением и служащие для указания точного курса и оценки знака и степени бокового уклонения движущегося объекта от фарватера.
Известен способ формирования зон ориентирования с помощью лазерного створного маяка для проводки речных и морских судов по заданной траектории [3], который заключается в том, что двумя лазерными маяками генерируют два лазерных луча, развернутых по вертикали, которые синхронно сканируют навстречу друг другу в азимутальной плоскости с заданной частотой. Лучи накладываются при встречном движении и образуют три трехмерные области, заполненные лазерным излучением и служащие для указания точного курса и степени отклонения от него.
Известные способы подразумевают использование двух маяков, излучение которых происходит в видимом для человека диапазоне длин волн, представляют собой стационарные установки, обслуживаемые людьми, предназначены для проводки кораблей и судов в мирное время.
В настоящее время при проведении высадки морского десанта, для обеспечения выхода самоходной плавающей техники на берег, разворачиваются створные знаки. Знаки разворачиваются манипуляторной группой, которая высаживается заранее. При возникновении противодействия высадки десанта на берег со стороны противника возникает угроза срыва как выполнения задачи манипуляторной группой в целом, так и угроза жизни членов манипуляторной группы, в частности.
В качестве недостатков такого способа обеспечения можно выделить следующие:
1. Низкая скрытность высадки манипуляторной группы на берег противника.
2. Высокая вероятность уничтожения манипуляторной группы противодиверсионными силами противника, особенно после развертывания створных знаков.
3. Низкая эффективность створных знаков в условиях плохой видимости.
4. Необходимо как минимум два человека для развертывания створных знаков.
5. Личный состав манипуляторной группы должен пройти обучение навигационно-гидрографическому обеспечению высадки морского десанта в различных условиях.
Задача, на решение которой направлено изобретение, - повышение скрытности установки створного знака на побережье противника, автоматическое развертывание и его функционирование без привлечения обслуживающего персонала, обеспечение скрытной работы, обеспечение эффективной работы в сложных метеоусловиях, исключение возможной гибели обслуживающего персонала ввиду его отсутствия.
Техническим результатом является повышение скрытности доставки, развертывания и функционирования роботизированного створного знака (РСЗ), низкая вероятность уничтожения, вызванная малой заметностью РСЗ, отсутствие обслуживающего персонала и, как следствие, исключение их гибели.
Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья состоит из нескольких этапов, а именно:
- подготовки РСЗ к эксплуатации;
- транспортировки РСЗ к месту установки и его установки;
- активации и начала работы РСЗ;
- использования информации от РСЗ для движения самоходной плавающей десантной техники на десантно-доступные районы побережья противника.
Основным элементом предлагаемого способа является роботизированный створный знак.
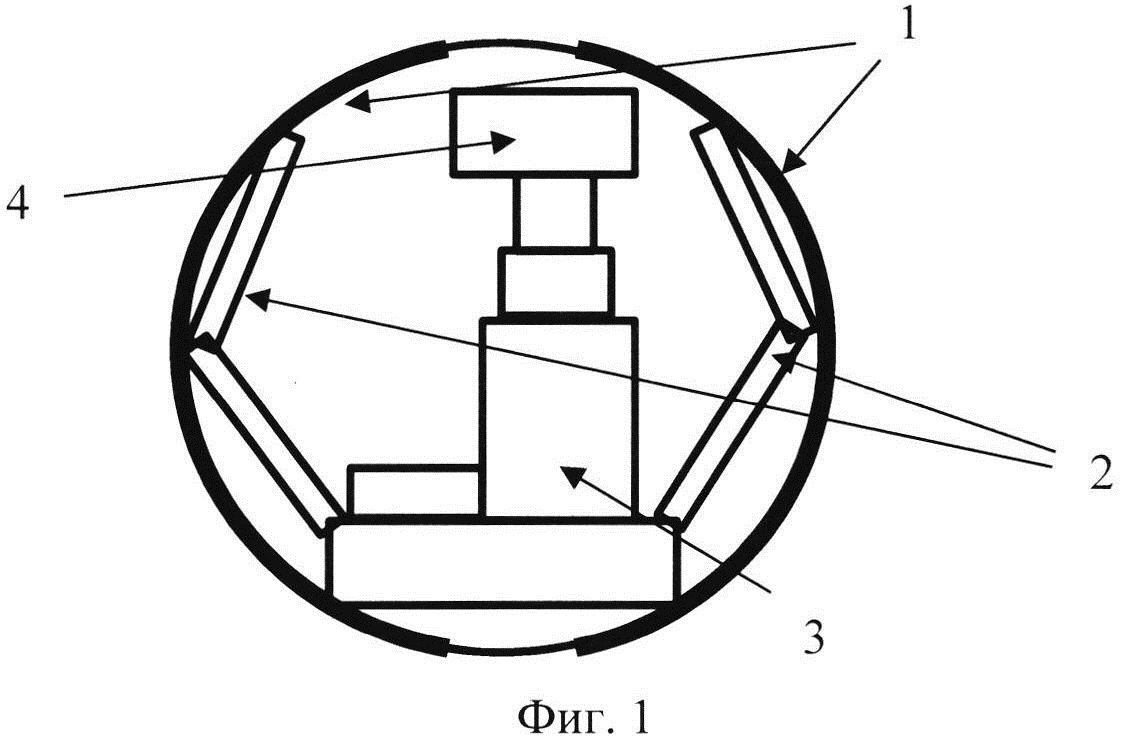
РСЗ представляет собой устройство, изображенное на фиг. 1, изготовленное из прочного материала, в сложенном состоянии представляющее собой шар, оболочка которого разделена на четыре лепестка - 1. Внутри устройства находятся: система раскрытия внешней оболочки (СРВО) - 2, система развертывания лазерного створа (СРЛС) - 3, система наведения лазерного створа (СНЛС) - 4.
Подготовка к эксплуатации РСЗ.
Перед эксплуатацией РСЗ производится его настройка:
1. В СНЛС 4 заносятся данные о пеленге с корабля на место побережья, где планируется выход десантной техники. Это производится с использованием программатора, подключаемого к РСЗ при помощи кабеля. После подключения программатора к РСЗ и подачи питания вводятся значения пеленга.
2. В СРВО 2 для датчика наклона задаются параметры плоскости, относительно которой впоследствии будет выравниваться РСЗ. Производится это следующим образом:
РСЗ устанавливается на Специальную ровную поверхность, изображенную на фиг. 2, углы наклона которой приводят к 0°. Специальная ровная поверхность (СРП) представляет собой две поверхности треугольной формы с двумя цилиндрическими уровнями - 5, расположенными под углом 90° друг к другу. Поверхности скреплены между собой тремя подъемными винтами - 6, при повороте которых происходит изменение угла наклона верхней поверхности относительно нижней. Для выравнивания поверхности вращают два подъемных винта одновременно в противоположные стороны и выводят пузырек уровня на середину ампулы. Затем производят вращение третьего подъемного винта, выводят пузырьки обоих ампул в нуль-пункт. Эти действия повторяют до тех пор, пока пузырек не будет отклоняться от центра ампулы более чем на одно деление.
После выравнивания СРП на нее основанием устанавливается РСЗ, включается его питание и производится нажатие на кнопку, фиксирующую измерения СРВО 2.
Транспортировка РСЗ к месту установки и его установка
Предлагается два вида транспортировки и установки: при помощи беспилотных летательных аппаратов (БПЛА); при помощи личного состава десантно-штурмовых групп.
В случае транспортировки БПЛА - РСЗ крепится к БПЛА. БПЛА следует к месту установки и производит сброс РСЗ. При раскрыве транспортировочных креплений производится активация РСЗ.
В случае использования личного состава десантно-штурмовых групп - РСЗ устанавливается на поверхность, после чего нажатием на соответствующую кнопку производится его активация.
Активация и начало работы РСЗ
После доставки РСЗ на берег противника и его активации, которая происходит после нажатия кнопки активации либо раскрыве транспортировочных креплений, через 30 с происходит срабатывание системы раскрытия внешней оболочки, которая определяет положение РСЗ относительно поверхности, на которой он находится при помощи датчика наклона, СРВО 2 определяет это следующим образом:
- если основание РСЗ находится на земной поверхности, то производится параллельное раскрытие всех лепестков 1;
- если РСЗ лежит на боку, происходит раскрытие того лепестка 1, на котором лежит РСЗ;
- если какой-либо из лепестков 1 упирается в препятствие, то СРВО 2 по данным датчика наклона раскрывает этот лепесток 1 до тех пор, пока телескопическая антенна не будет направлена вверх.
Далее система открывает остальные лепестки 1 таким образом, чтобы поставить РСЗ в положение, позволяющее развернуть лазерный створ.
Длина лепестков составляет 70% от диаметра РСЗ. Это позволяет при раскрытии поставить РСЗ в требуемое положение вне зависимости от первоначальной установки.
После раскрытия лепестков 1 происходит запуск системы развертывания лазерного створа 3. СРЛС 3 в развернутом состоянии изображена на фиг. 3. Система развертывает телескопическую антенну, в верхней части которой находится лазерное устройство. После фиксации телескопической антенны СНЛС 4, используя данные с датчика магнитного поля, а также данные относительно местоположения десантных кораблей, которые были введены в РСЗ перед началом эксплуатации, производит поворот лазера в сторону десантных кораблей. Излучение лазера производится в диапазоне длин волн, не видимых для человека.
Использование информации от РСЗ для движения самоходной плавающей десантной техники на десантно-доступные районы побережья противника
Лазерный створ действует следующим образом: на плавающей технике устанавливается система детектирования интенсивности излучения лазерного створа. В состав системы входят соединенные между собой: антенна, блок обработки принимаемой от лазерного створа информации, индикатор. При приеме максимальной интенсивности сигнала - техника движется в заданном направлении. При снижении интенсивности - техника уходит с линии створа. Датчик интенсивности сигнала показывает, в какую сторону от линии створа отклоняется техника при движении на десантно-доступные районы побережья противника.
Источники информации
1. Патент РФ №2392174.
2. Патент РФ №2491204.
3. Патент РФ № 2354580.
Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья, отличающийся тем, что производится скрытная установка одного роботизированного створного знака при помощи беспилотного летательного аппарата либо личным составом десантно-штурмового отряда, не подготовленным для производства навигационно-гидрографического обеспечения высадки морского десанта, и его развертывание в полностью автоматическом режиме, без привлечения обслуживающего персонала, для обозначения при помощи лазера в диапазоне длин волн, не видимом для глаза человека, направления на десантно-доступные районы побережья самоходной плавающей десантной техники, на которую устанавливается система детектирования интенсивности приема лазерного излучения.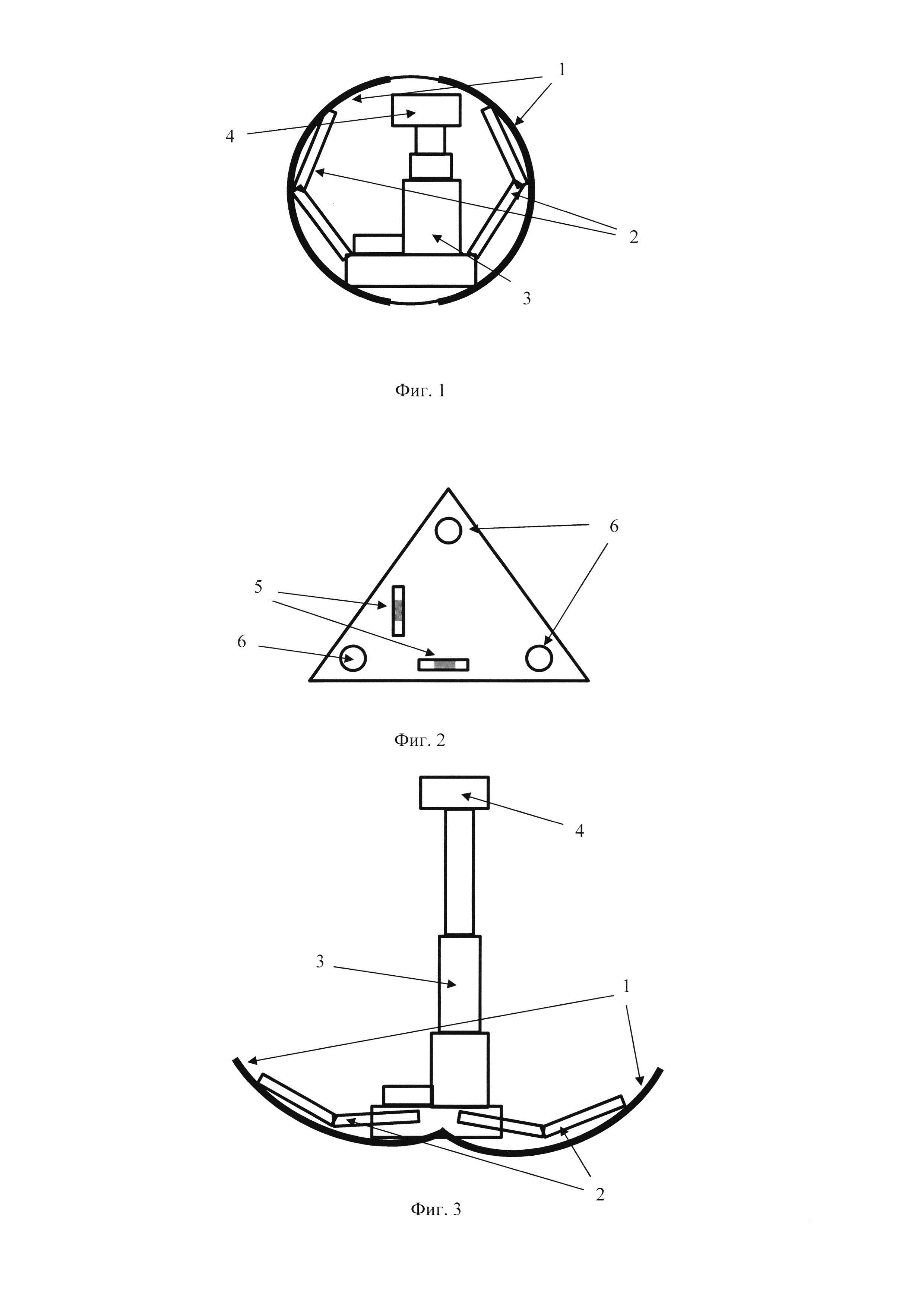
Отсечной клапан
Способ управления газотурбинным двигателем с форсажной камерой сгорания и система для его осуществления
Имитатор дорожный тренажёра транспортного средства
Способ управления газотурбинным двигателем и система для его осуществления
Система автоматизированного формирования прогноза погодных явлений
Способ удержания космического аппарата на геосинхронной 24-часовой орбите
Способ обнаружения шумоподобного сигнала
Система для определения скорости распространения и направления прихода ионосферного возмущения
Зеркальная антенна аэростатического летательного аппарата
Способ защиты группового объекта от воздействия средств поражения заградительным дисперсным образованием
Способ навигационного обеспечения автономных необитаемых подводных аппаратов

