Результат интеллектуальной деятельности: УСТРОЙСТВО ОПТИМИЗАЦИИ АЛГОРИТМОВ АДАПТАЦИИ И СТАБИЛИЗАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОПЕРАТОРНЫМ МЕТОДОМ
Вид РИД
Изобретение
Изобретение относится к области информационно-измерительной техники и предназначено для автоматизированного расчета параметров трехканальных систем стабилизации статически устойчивых летательных аппаратов с учетом перекрестных связей каналов. С ростом информационной и структурно-целевой сложности функционирования и проектирования систем автоматического управления, проявляющейся в их многообъектности (или многоканальности, многосвязности) и многокритериальности, существенным становится учет факторов несогласованности, конфликтности и неопределенности различного характера, который может быть осуществлен с использованием комбинированных подходов теории игр и классической теории управления. Это позволяет оптимизировать управление многообъектными многокритериальными системами (ММС), а также обеспечить межобъектную устойчивость или балансировку подсистем ММС по эффективности или потерям при решении задач управления в условиях исходной структурной несогласованности.
Из уровня техники известно устройство, формирующее сигнал управления системой стабилизации летательного аппарата (патент на изобретение № RU 2487052, опубл. 10.07.2011). Данное устройство включает в себя беспилотный летательный аппарат (БПЛА) с рулевым приводом, дифференцирующим гироскопом и датчиком линейных ускорений, а также блок формирования сигнала стабилизации и две отрицательные обратные связи. Устройство обеспечивает формирование управляющего сигнала, компенсирующего внешние ограниченные возмущения с неизвестными статистическими свойствами за счет формирования сигнала управления системой стабилизации БПЛА на основе расчета областей достижимости в плоскости путем выбора оптимального гипотетического момента времени окончания переходного процесса. Недостатком данного устройства является недостаточная достоверность расчета управляющего сигнала, компенсирующего действие внешних возмущений из-за отсутствия перекрестных связей между каналами.
Из уровня техники известна автоматизированная система распределения ресурсов (патент на полезную модель № RU 80604, опубл. 10.02.2009), состоящая из блока ввода данных, блока формирования вектора значимости, блока ранжирования и блока формирования матрицы распределения. Данная система решает статическую задачу принятия решения в многообъектных системах путем нахождения компромисса между свойствами стабильности и эффективности и распределения ресурсов по объектам системы в определенный момент времени. Недостатками данной системы являются отсутствие динамической многокритериальной оптимизации управления и отсутствие балансировки системы по эффективности.
Наиболее близким техническим решением, взятым за прототип, является автоматизированная система многокритериального выбора параметров трехканальной системы стабилизации летательного аппарата с перекрестными связями (патент на полезную модель № RU 142322, опубл. 27.06.2014), позволяющая осуществить динамическую стабилизацию во время всего полета БПЛА. Оптимизацию проводят по параметрам (статическая точность, колебательность, быстродействие и устойчивость) в двух каналах, а затем полученные оптимальные параметры используют для задания начальных приближений и диапазона параметров для проведения оптимизации трехканальной системы. Система состоит из блоков ввода данных продольного канала, бокового канала и канала крена, блоков алгоритмов адаптации каналов, блоков формирования перекрестных связей, датчиков угловых скоростей и датчиков линейных ускорений и позволяет
сформировать управляющий сигнал с помощью методов динамической многокритериальной оптимизации на основе компромисса в виде равновесно-арбитражной структуры. Недостатками данной системы являются недостаточная достоверность при исследовании устойчивости системы стабилизации из-за невозможности применения классических методов теории автоматического управления (например, частотные критерии качества) и невозможность расчета передаточных функций каналов стабилизации, необходимых для данных методов исследования.
Задачей предлагаемого изобретения является устранение перечисленных выше недостатков и создание устройства оптимизации алгоритмов адаптации и стабилизации летательного аппарата операторным методом, позволяющего рассчитать параметры трехканальной системы стабилизации с учетом перекрестных связей между каналами и повысить достоверность полученного результата и точность управления летательным аппаратом. Более точное вычисление оптимального управляющего сигнала позволяет компенсировать действие внешних возмущающих воздействий с учетом перекрестных связей.
Поставленная задача решается за счет того, что устройство оптимизации алгоритмов адаптации и стабилизации летательного аппарата операторным методом включает в себя блоки ввода данных продольного канала, бокового канала и канала крена, систему стабилизации, состоящую из продольного канала, бокового канала и канала крена, модуль расчета перекрестных связей, модуль оптимизации системы стабилизации, а также дополнительно содержит модуль формирования критериев, модуль формирования результатов и модуль хранения данных, при этом группы выходов блоков ввода данных продольного канала, бокового канала и канала крена соединены соответственно с первой, второй и третьей группой входов системы стабилизации, четвертая группа входов системы стабилизации соединена с первой группой выходов модуля оптимизации системы стабилизации, группа выходов системы стабилизации соединена с группой входов модуля расчета перекрестных связей, группа выходов модуля расчета перекрестных связей соединена с группой входов модуля формирования критериев, группа выходов модуля формирования критериев соединена с группой входов модуля оптимизации системы стабилизации, вторая группа выходов модуля оптимизации системы стабилизации соединена с группой входов модуля формирования результатов, выход модуля формирования результатов соединен с группой входов модуля хранения данных.
Сущность изобретения поясняется чертежами, на которых представлены:
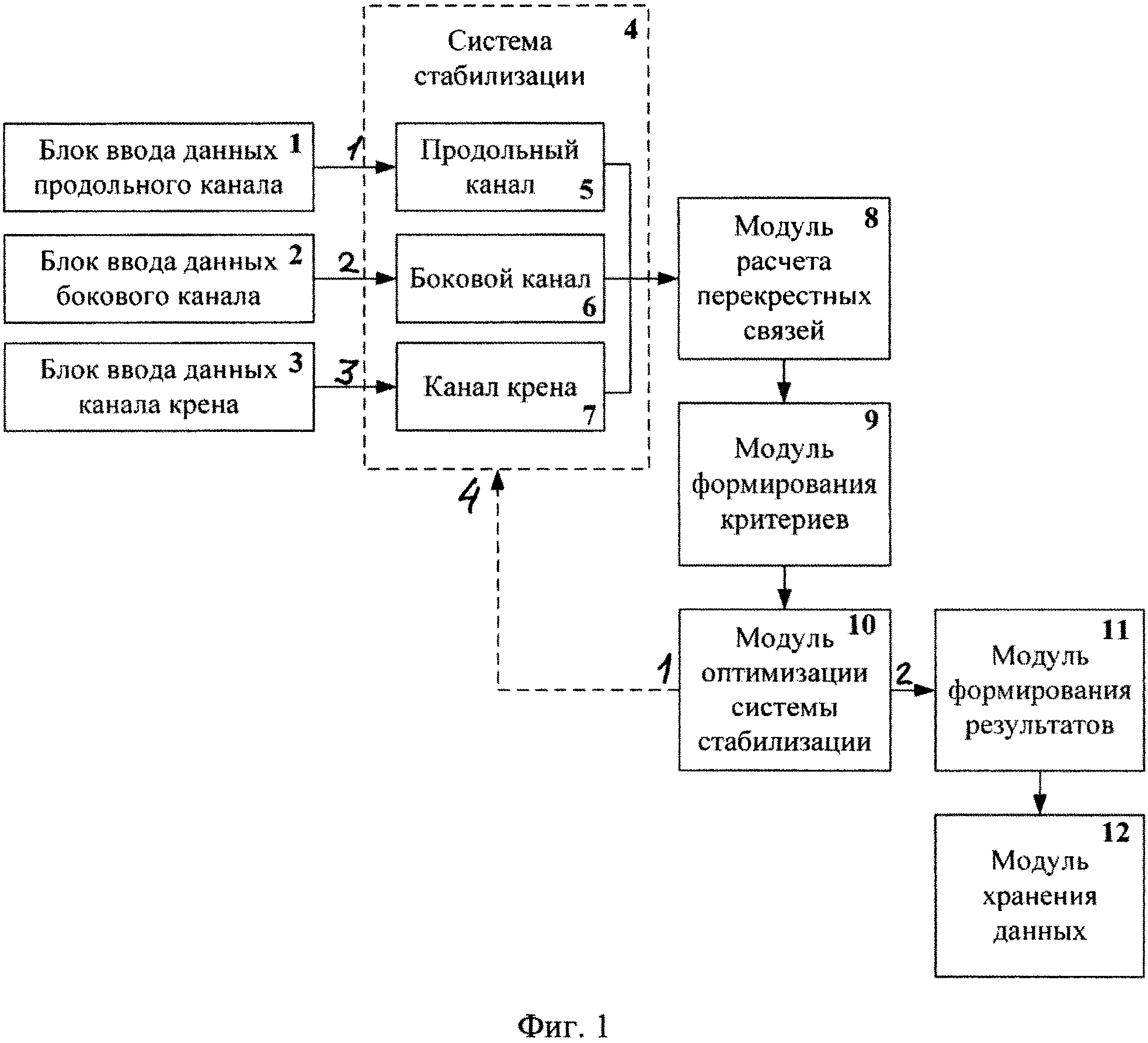
на фиг. 1 - структурная схема варианта устройства оптимизации алгоритмов адаптации и стабилизации летательного аппарата операторным методом,
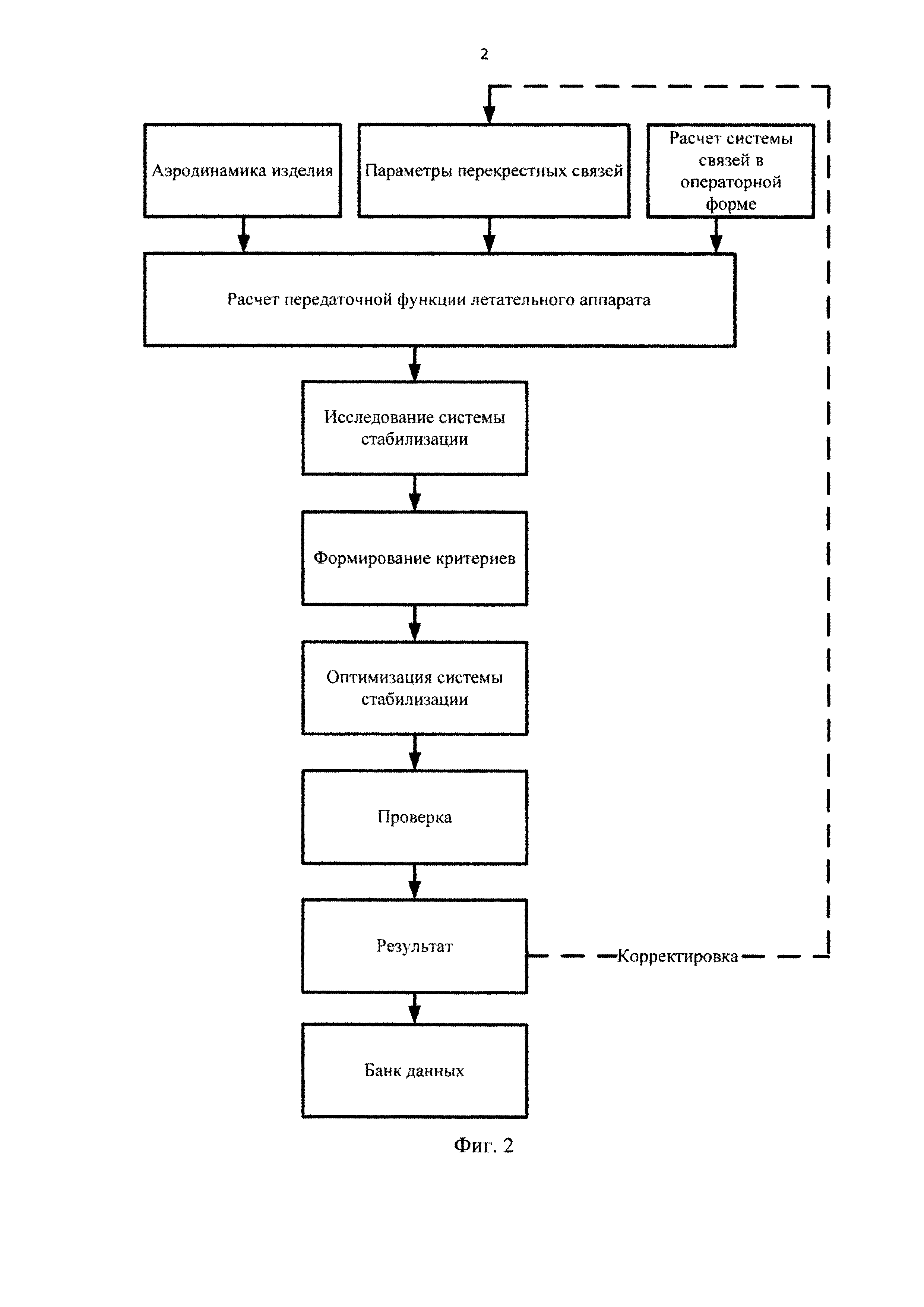
на фиг. 2 - алгоритм работы устройства оптимизации алгоритмов адаптации и стабилизации летательного аппарата операторным методом.
На фиг. 1 обозначены:
1 - блок ввода данных продольного канала;
2 - блок ввода данных бокового канала;
3 - блок ввода данных канала крена;
4 - система стабилизации летательного аппарата;
5 - продольный канал системы стабилизации;
6 - боковой канал системы стабилизации;
7 - канал крена системы стабилизации;
8 - модуль расчета перекрестных связей;
9 - модуль формирования критериев;
10 - модуль оптимизации системы стабилизации;
11 - модуль формирования результатов;
12 - модуль хранения данных.
Предлагаемое устройство, схема которого представлена на фиг. 1, в общем случае содержит: блоки ввода данных продольного канала 1, бокового канала 2 и канала крена 3; систему стабилизации 4, состоящую из продольного канала 5, бокового канала 6, канала крена 7, модуль расчета перекрестных связей 8, модуль формирования критериев 9, модуль оптимизации системы стабилизации 10, модуль формирования результатов 11 и модуль хранения данных 12. Группы выходов блоков ввода данных продольного канала 1, бокового канала 2 и канала крена 3 соединены соответственно с первой, второй и третьей группой входов системы стабилизации 4, четвертая группа входов системы стабилизации 4 соединена с первой группой выходов модуля оптимизации системы стабилизации 10. Группа выходов системы стабилизации 4 соединена с группой входов модуля расчета перекрестных связей 8, группа выходов модуля расчета перекрестных связей 8 соединена с группой входов модуля формирования критериев 9. Группа выходов модуля формирования критериев 9 соединена с группой входов модуля оптимизации системы стабилизации 10, вторая группа выходов модуля оптимизации системы стабилизации 10 соединена с группой входов модуля формирования результатов 11, выход модуля формирования результатов 11 соединен с группой входов модуля хранения данных 12.
Блоки ввода данных продольного канала 1, бокового канала 2 и канала крена 3 могут быть выполнены в виде клавиатуры, в виде блока ввода данных с локальных дисков или с сервера базы данных. С помощью блоков ввода данных продольного канала 1, бокового канала 2, и канала крена 3 задают начальные параметры полета: высоту пуска, начальную скорость, начальные угловые скорости, начальные углы Эйлера и заданные сигналы управления.
Объектом управления (не показан) является математическая модель динамики летательного аппарата, состоящая из контура стабилизации продольного канала 5, контура стабилизации бокового канала 6 и контура стабилизации канала крена 7. Введение перекрестных связей изменяет динамику системы стабилизации 4, в которой параметры рассчитаны независимо для каждого канала. Для получения начального значения оптимизируемых параметров в трехканальной системе стабилизации 4 применен алгоритм поиска интервалов устойчивости на основе ее непосредственного моделирования с тем или иным значением оптимизируемого параметра.
Каждый из трех каналов стабилизации - продольный 5, боковой 6 и канал крена 7 - включает в себя блок регуляторов (не показан), блок корректирующих фильтров (не показан), блок рулевых приводов (не показан), блок датчиков угловых скоростей (не показан). Блок рулевых приводов представляет собой математическую модель, с помощью которой рассчитывают необходимые отклонения эквивалентных рулей (руля высоты, руля направления и элеронов) для отработки управляющих сигналов системы стабилизации 4. Эквивалентные рули определяют отклонения физических рулей, влияющих на динамические характеристики летательного аппарата. Продольный канал 5 и боковой канал 6 дополнительно включают в себя блоки датчиков линейных ускорений (не показаны). В системе стабилизации 4 на основе начальных данных формируют параметры траектории и аэродинамические коэффициенты летательного аппарата.
В модуле оптимизации системы стабилизации 10 проводят оптимизацию системы стабилизации 4 путем корректировки параметров регуляторов. В модуле формирования результатов 11 формируют банк данных параметров регуляторов и критериев качества и размещают полученные данные в модуле хранения данных 12. Формируют алгоритмы адаптации и стабилизации.
В качестве объекта управления может быть использован реальный летательный аппарат или его математическая модель (объект управления может быть реализован в составе автоматизированного рабочего места, выполненного на базе компьютера, например, Pentium 4 512 Мб ОЗУ, 100 HDD).
Уравнение продольного движения летательного аппарата имеет вид:

где
а 11 - коэффициент, характеризующий аэродинамическое демпфирование летательного аппарата;
а 12 - коэффициент, характеризующий статическую устойчивость летательного аппарата;
а 13 - коэффициент, характеризующий эффективность рулей высоты;
а 15 - коэффициент, характеризующий отношение момента инерции продольного канала к единице;
р - комплексная переменная;
ϑ0 - угол тангажа опорной траектории, [рад];
Ψ0 - угол рыскания опорной траектории, [рад];
γ0 - угол крена опорной траектории, [рад];
Δϑ - угол тангажа, [град];
ΔΨ - угол рыскания, [град];
Δγ - угол крена, [град];
Δα - угол атаки, [град];
Δδв - угол отклонения рулей высоты, [град];
Мвозм,z - момент возмущения в продольном канале, [Н⋅м].
Уравнение бокового движения летательного аппарата:
где
b11 - коэффициент, характеризующий аэродинамическое демпфирование летательного аппарата;
b12 - коэффициент, характеризующий статическую устойчивость летательного аппарата;
b13 - коэффициент, характеризующий эффективность рулей направления;
b15 - коэффициент, характеризующий отношение момента инерции бокового канала к единице;
р - комплексная переменная;
ϑ0 - угол тангажа опорной траектории, [рад];
Ψ0 - угол рыскания опорной траектории, [рад];
γ0 - угол крена опорной траектории, [рад];
Δϑ - угол тангажа, [град];
ΔΨ - угол рыскания, [град];
Δγ - угол крена, [град];
Δβ - угол скольжения, [град];
Δδн - угол отклонения рулей направления, [град];
Мвозм,у - момент возмущения в боковом канале, [Н⋅м].
Уравнение движения по крену летательного аппарата:

где
с11 - коэффициент, характеризующий аэродинамическое демпфирование летательного аппарата;
с12 - коэффициент, характеризующий статическую устойчивость летательного аппарата;
с13 - коэффициент, характеризующий эффективность элеронов;
 - коэффициент, характеризующий эффективность рулей направления;
- коэффициент, характеризующий эффективность рулей направления;
с15 - коэффициент, характеризующий отношение момента инерции канала крена к единице;
р - комплексная переменная;
ϑ0 - угол тангажа опорной траектории, [рад];
Ψ0 - угол рыскания опорной траектории, [рад];
Δϑ - угол тангажа, [град];
ΔΨ - угол рыскания, [град];
Δγ - угол крена, [град];
Δβ - угол скольжения, [град];
Δδн - угол отклонения рулей направления, [град];
Δδэ - угол отклонения элеронов, [град];
Мвозм,х - момент возмущения в канале крена, [Н⋅м].
Рассмотрим работу устройства на примере работы варианта устройства, схема которого представлена на фиг. 1.
Алгоритм работы устройства представлен на фиг. 2.
С помощью блоков ввода данных продольного канала 1, бокового канала 2 и канала крена 3 задают угловые скорости продольного канала ωz0, бокового канала ωу0, канала крена ωх0, задают начальную высоту пуска, начальную скорость полета летательного аппарата, начальные углы Эйлера, заданные сигналы управления, задают аэродинамические коэффициенты летательного аппарата. Представляют аэродинамику летательного аппарата в виде аэродинамических коэффициентов: коэффициентов лобового сопротивления сх, коэффициентов подъемной силы су, коэффициентов боковой силы cz, коэффициентов моментов крена mx, рыскания my и тангажа mz., а также в виде приращений сил и моментов, для этого на основе модели пространственной аэродинамики производят расчет приращений сил и моментов и вращательных производных. Задают параметры перекрестных связей между каналами системы стабилизации 4 на основе параметров опорной траектории: угловой скорости продольного канала ωz0, угловой скорости бокового канала ωу0, угловой скорости канала крена ωх0, угла тангажа υ0, угла рыскания ϕ0, угла крена γ0, угла наклона траектории Θ0, угла поворота траектории Ψ0. Рассчитывают передаточные функции для трех каналов (продольного 5, бокового 6 и канала крена 7) системы стабилизации 4. В модуле расчета перекрестных связей 8 на основе параметров траектории, полученных из системы стабилизации 4, рассчитывают передаточные функции для трех каналов системы стабилизации 4 с учетом перекрестных связей между каналами. При расчете передаточных функций систему связей рассчитывают в операторной форме, при этом летательный аппарат рассматривают как абсолютно жесткое тело и не учитывают сферическую форму Земли. Трехканальная система приводится к виду, преобразованному по Лапласу, с учетом параметров опорной траектории.
В модуле формирования критериев 9 для расчета показателей качества и формирования критериев качества системы стабилизации 4 используют передаточные функции, при этом могут быть использованы классические методы расчета, применяемые для линеаризованных систем или новые перспективные методы (на основе генетических алгоритмов, теории игр и т.д.). Выбор метода зависит от поставленных целей и задач. Критериями качества могут быть - быстродействие, перерегулирование, колебательность, точность, запасы устойчивости и т.д.
В модуле оптимизации системы стабилизации 10 на основе сформированных критериев рассчитывают оптимальную структуру контура стабилизации и оптимальные коэффициенты для блоков регуляторов, входящих в структуру системы стабилизации 4. Структура системы стабилизации 4 может быть изменена для обеспечения требуемых критериев качества. После оптимизации проводят проверку системы с помощью трехканальной системы стабилизации с моделью пространственной аэродинамики. В случае несоответствия результатов требуемым критериям производят корректировку параметров перекрестных связей в соответствии с алгоритмом работы устройства, показанным на фиг. 2. Результаты оптимизации формируют в модуле формирования результатов 11 и передают в модуль хранения данных 12. Результатами могут быть коэффициенты адаптации, критерии качества, параметры перекрестных связей и т.д. Данные из модуля хранения данных 12 в дальнейшем могут быть использованы оператором для формирования алгоритмов адаптации и траекторного управления.
Модуль расчета перекрестных связей 8, модуль формирования критериев 9, модуль формирования результатов 11 и модуль хранения данных 12 могут быть реализованы на базе компьютеров, например Pentium 4 512 Мб ОЗУ, 100 HDD, связанных между собой и расположенных в конструкторском подразделении предприятия. Предлагаемое устройство может быть реализовано также на стенде полунатурного моделирования при проведении отработки систем стабилизации 4 летательных аппаратов.
Устройство оптимизации алгоритмов адаптации и стабилизации летательного аппарата операторным методом, включающее в себя блоки ввода данных продольного канала, бокового канала и канала крена, систему стабилизации, состоящую из продольного канала, бокового канала и канала крена, модуль расчета перекрестных связей, модуль оптимизации системы стабилизации, отличающееся тем, что устройство дополнительно содержит модуль формирования критериев, модуль формирования результатов и модуль хранения данных, при этом группы выходов блоков ввода данных продольного канала, бокового канала и канала крена соединены соответственно с первой, второй и третьей группой входов системы стабилизации, четвертая группа входов системы стабилизации соединена с первой группой выходов модуля оптимизации системы стабилизации, группа выходов системы стабилизации соединена с группой входов модуля расчета перекрестных связей, группа выходов модуля расчета перекрестных связей соединена с группой входов модуля формирования критериев, группа выходов модуля формирования критериев соединена с группой входов модуля оптимизации системы стабилизации, вторая группа выходов модуля оптимизации системы стабилизации соединена с группой входов модуля формирования результатов, выход модуля формирования результатов соединен с группой входов модуля хранения данных.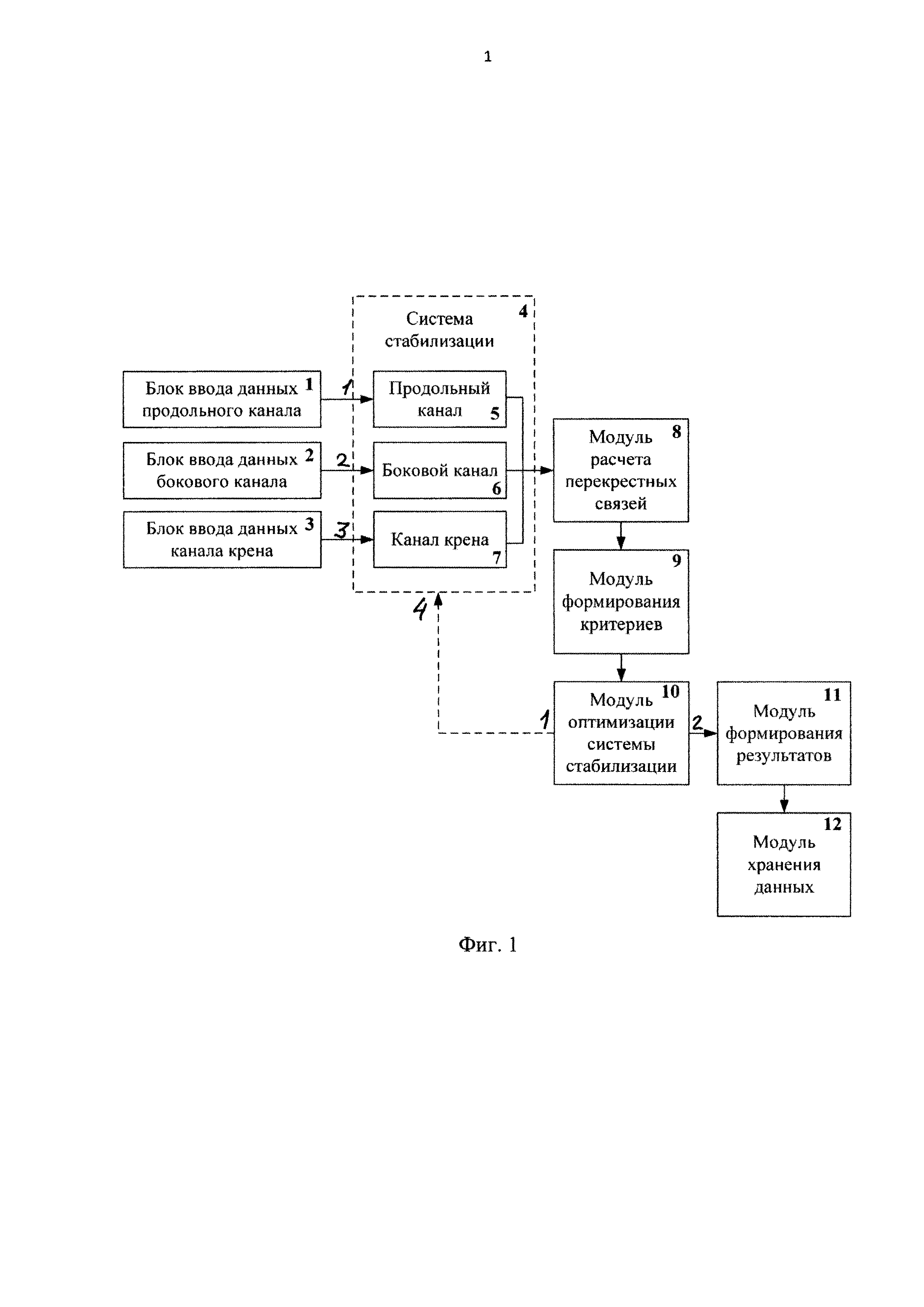
Полупогружная двигательно-движительная установка
Двигательно-движительная установка подводного аппарата
Интегральный аттенюатор
Криогенный гироскоп
Мобильная лаборатория для испытаний на электромагнитные воздействия
Система регенерации гипоксической газовоздушной среды с повышенным содержанием аргона для обитаемых герметизированных объектов
Рыбопромысловое судно ледового плавания
Способ изготовления образца сотового заполнителя для испытаний
Способ электромагнитных испытаний объекта и система для его реализации
Способ подавления реверберационной помехи при измерении акустических характеристик активного противогидролокационного покрытия в ограниченной акватории
Устройство снижения аварийного давления и локализации последствий аварии в защитной оболочке при разгерметизации первого контура судовой (корабельной) атомной энергетической установки
Малогабаритный высокооборотный судовой генераторный агрегат
Комбинированный двигательно-движительный комплекс судна
Маневренный стенд для измерения и настройки магнитного поля объектов морской техники
Способ оценки погрешностей трехосного гироскопа
Устройство турбогенератора трехфазных токов двух различных частот
Способ измерения коэффициента отражения звукопоглощающей конструкции
Микромеханический гироскоп rr-типа
Способ измерения магнитных моментов объекта
Радиопоглощающее покрытие на основе дифракционной решетки

