Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ РОБОТОМ
Вид РИД
Изобретение
Изобретение относится к области робототехники и может быть использовано для управления мобильным роботом.
Известен способ управления подвижным роботом (патент РФ №2424892, 27.07.2011 г.), согласно которому проводят глобальную навигацию робота в заданных пределах местности с помощью блока глобального позиционирования, получают изображение земной поверхности, осуществляют картографирование неизвестной местности, составляют прогноз о поверхностном распределении объектов на пути робота, находят оптимальный маршрут движения робота, устанавливают параметры траектории движения робота, при этом с учетом текущей информации о местонахождении робота и о поверхностном распределении объектов непосредственно впереди по курсу движения робота определяют параметры движения робота, причем непосредственно управление движением автономного робота осуществляют, как с учетом спланированного направления движения, так и с учетом информации о препятствиях на пути робота, полученной с помощью блока горизонтального зрения и блока тактильных сенсоров.
Также известен способ управления мобильным роботом (патент РФ №2274543, 20.04.2006 г.), принятый за наиболее близкое решение к заявляемому способу, заключающийся в том, что на подвижном роботе устанавливают блок обнаружения препятствия, блок определения пройденного расстояния, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом, который подключен к видеокамере наблюдения, строят трехмерную модель пространства перед подвижным роботом и над ним, осуществляют дистанционное управление подвижным роботом с использованием мобильной связи и сети Интернет.
Указанные способы обладают следующими общими недостатками:
1. Необходимостью выполнения большого числа однотипных действий, совершаемых оператором при выполнении базовых операций по перемещению робота.
2. Необходимостью непрерывного контроля человеком процесса движения робота, утомляемость оператора и снижение внимательности, что приводит к высокому влиянию ошибок оператора на качество удаленного управления роботом.
3. Длительным временем обучения оператора по удаленному управлению роботом.
5. Необходимостью учета динамических факторов, таких как движущиеся препятствия, люди, встречающиеся на пути перемещения робота.
6. Необходимостью учета габаритов робота при его удаленном управлении для избегания столкновений со статическими и динамическими препятствиями.
7. Необходимостью учета масс-инерционных характеристик системы оператором при удаленном управлении.
Таким образом, указанные способы управления мобильными роботами являются неудобными и сложными в реализации. При этом ухудшаются такие количественные показатели, как средняя скорость перемещения между начальной и конечной точкой, количество столкновений с препятствиями на единицу пути. Также их использование приводит к неточному позиционированию положения робота, что, в свою очередь, может быть опасным для людей, находящихся в зоне работы робота.
Задачей изобретения является автоматизация процесса управления роботом.
Техническим результатом изобретения является повышение точности позиционирования положения робота при его перемещении за счет автоматизации процесса движения робота вдоль траектории, обнаружения и объезда препятствий, упрощения процесса управления, выраженного в указании конечной точки, в которую робот перемещается самостоятельно.
Предлагаемый способ управления подвижным роботом представляет собой развитие технологий телеприсутствия для робототехнических решений, рассмотренных выше.
Технический результат достигается при использовании способа управления подвижным роботом, включающего установку на подвижном роботе камеры и управление роботом с использованием программируемого устройства управления, при этом посредством упомянутой камеры получают изображение местности, указывают конечную точку, в которой должен оказаться робот, на полученном изображении, отображенном на мониторе посредством приложения или веб-сайта через интерфейс, запущенный на упомянутом программируемом устройстве управления, показывающем видео с камеры робота, с использованием оптических параметров камеры вычисляют координаты конечной точки в системе координат, связанной с роботом, осуществляют обнаружение препятствий с помощью установленного на подвижном роботе сканирующего лазерного дальномера и осуществляют автоматическое перемещение робота в конечную точку по спланированной траектории с объездом им статических и динамических препятствий, при этом рассчитывают требуемые угловую и поступательную скорости движения робота с минимальным отклонением от спланированной траектории.
Указание конечной точки осуществляют на программируемом устройстве управления с помощью мыши или сенсорного дисплея.
Управление роботом осуществляют с помощью регуляторов (П, ПИ, ПД или ПИД регуляторов) с использованием нечеткой логики.
Оснащение подвижного робота сканирующим лазерным дальномером, управление его работой посредством приложения или веб-сайта, запущенных на программируемом устройстве, указание конечной точки перемещения робота на программируемом устройстве управления, показывающем видео с камеры робота, автоматизация перемещения робота в конечную точку с преодолением им препятствий позволяет получать изображение местности, которая находится в зоне видимости камеры робота, автоматизировать определение оптимальной траектории движения робота и перемещение вдоль нее с автоматическим избеганием столкновений со статическими и динамическими объектами, также использовать высокоуровневый интерфейс для указания конечной точки траектории движения, что в итоге позволяет минимизировать количество операций, выполняемых оператором, повысить точность позиционирования положения робота в каждой точке траектории, автоматизировать и упростить процесс управления его движением.
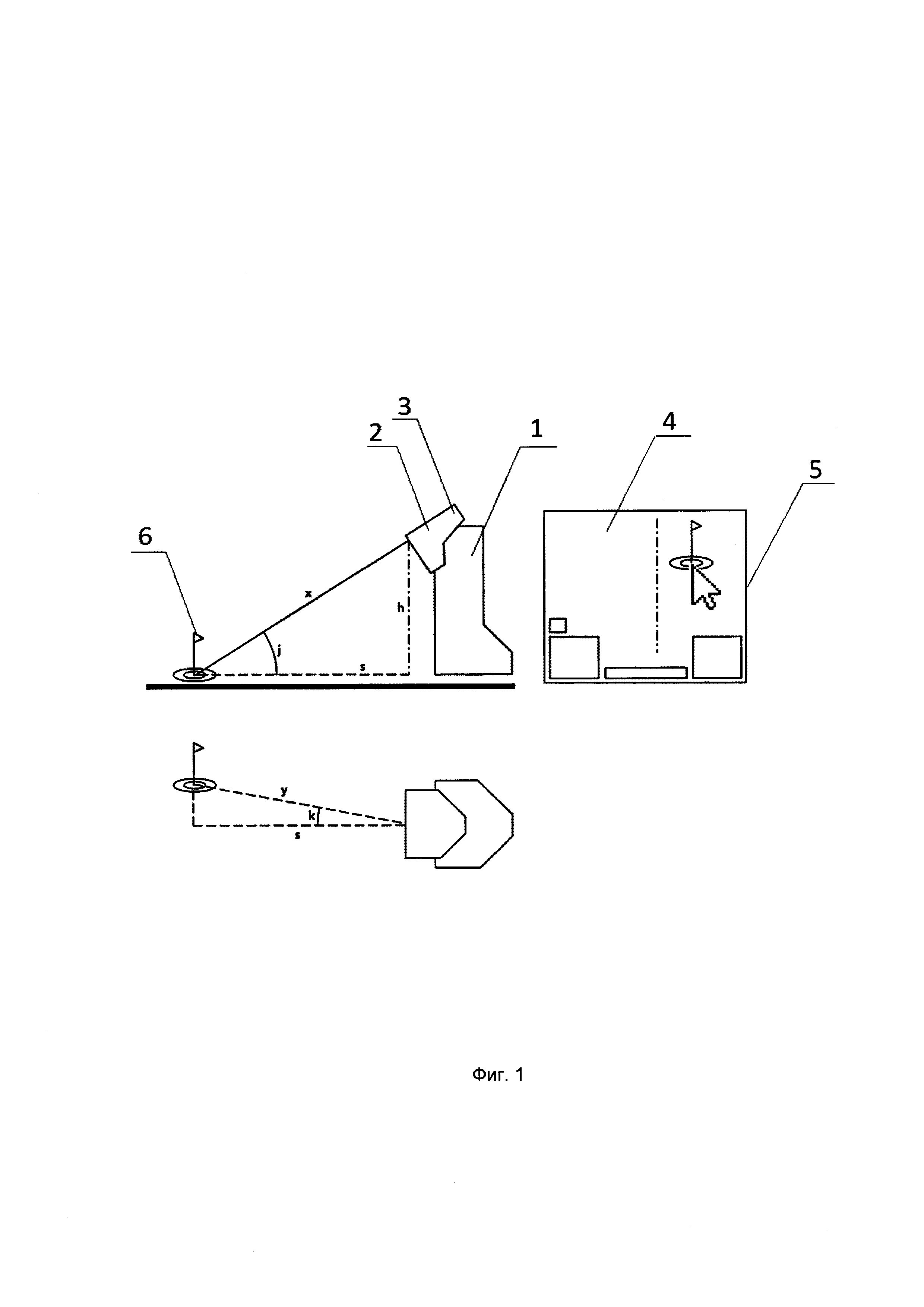
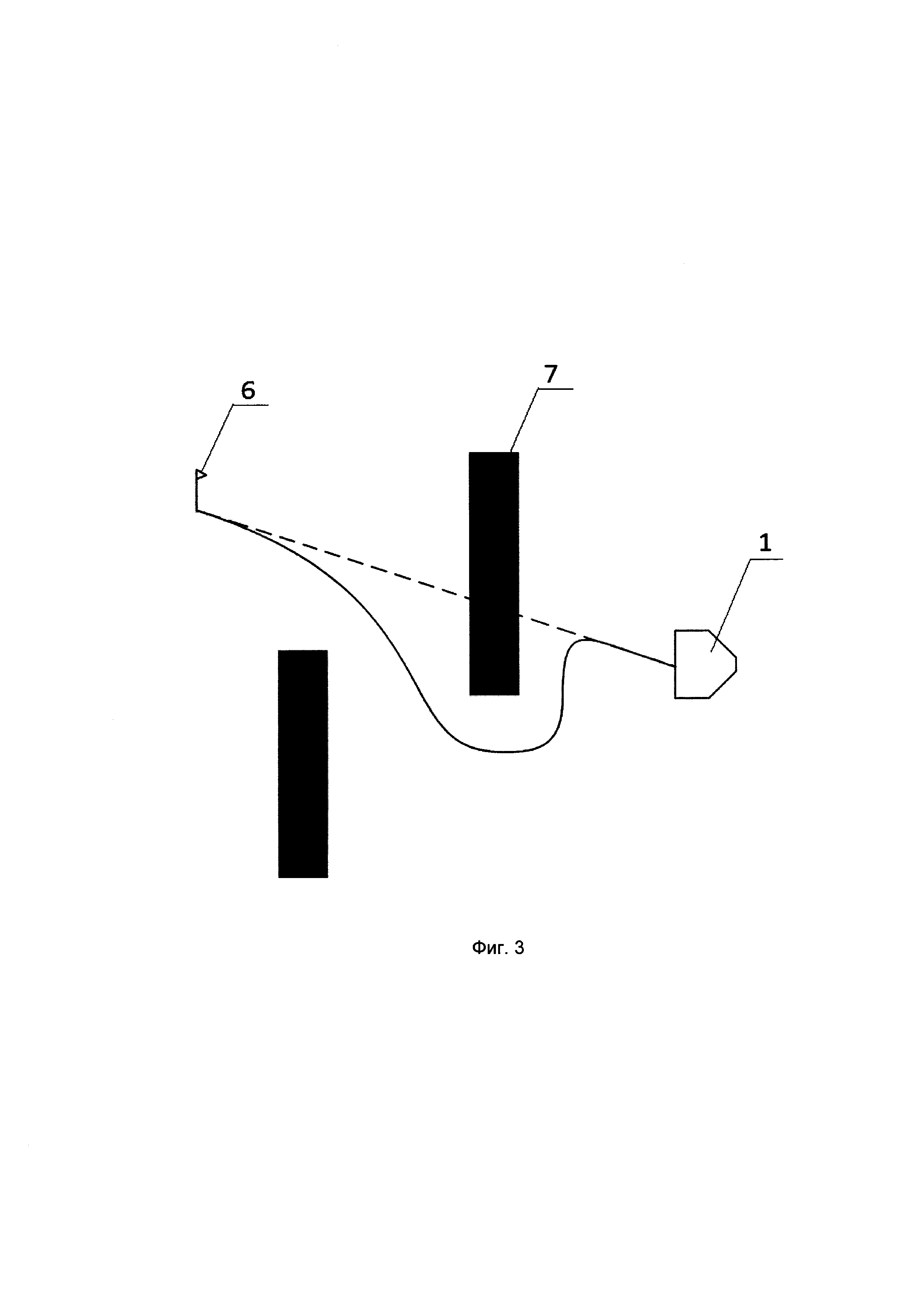
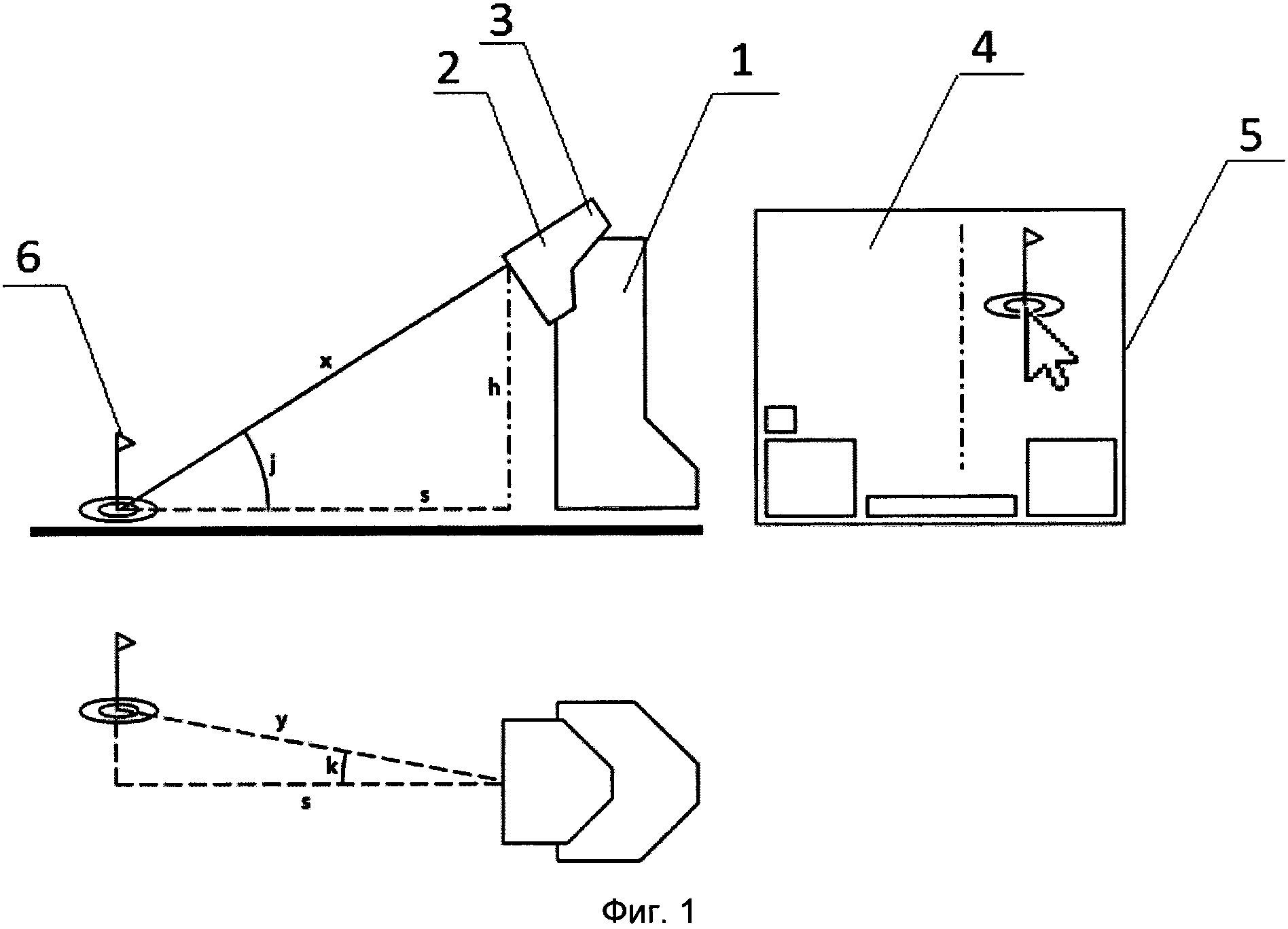
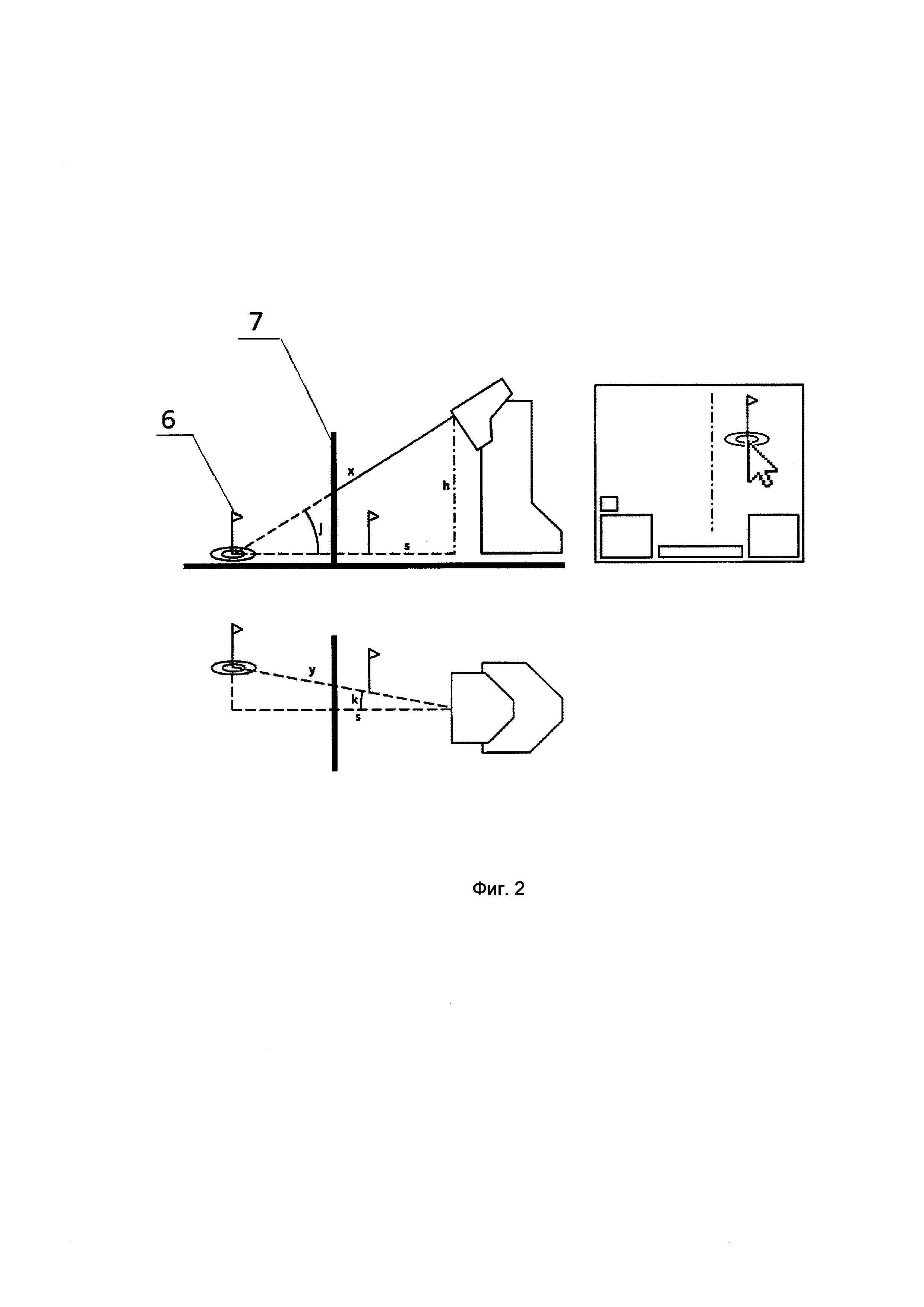
На фиг. 1 приведена иллюстрация расчета конечной точки движения робота при отсутствии перед ним препятствий при известных параметрах координат точки установки камеры, координаты конечной точки траектории на экране оператора и известных оптических параметрах камеры. На фиг. 2 приведена иллюстрация расчета конечной точки траектории при наличии перед роботом препятствий. На фиг. 3 изображен способ объезда препятствий роботом с помощью автоматической генерации траектории объезда вдоль препятствий, обнаруженных с помощью лазерного сканирующего дальномера.
Заявляемый способ реализуется при помощи системы управления подвижным роботом, состоящей из подвижного робота 1, оснащенного сканирующим лазерным дальномером 2 и камерой 3, приложения или веб-сайта, имеющего интерфейс 4, запущенных на программируемом устройстве 5, показывающем видео с камеры 3 робота 1. Он должен двигаться к объекту 6, при этом на его пути могут встретиться препятствия 7.
Координаты подвижного робота 1 могут определяться с помощью одного из методов одновременной локализации и построения карты (SLAM) или метода локализации по известной карте, описанных, например, в книге "Probabilistic Robotics" под авторством Sebastian Thrun, Wolfram Burgard and Dieter Fox (1999-2000), или с помощью системы одометрии.
Посредством камеры 3, установленной на подвижном роботе 1, операторы получают изображение местности и обнаруживают конечную точку - объект 6, к которому должен двигаться робот 1. Формирование изображения конечной точки - объекта 6 - выполняется с помощью графического семпла (на фиг. 1-3 обозначен «флажком»), интуитивно понятного для пользователя. Полученные изображения посредством приложения или веб-сайта отображаются через интерфейс 4, запущенный на программном устройстве 5. Оператор, имея полученное изображение местности, с помощью указателя мыши и другого устройства с аналогичными функциями указывает конечную точку на изображении, показанном на мониторе, - объект 6.
На фиг. 1 приведены оптические параметры камеры 3, используемые для вычисления координат объекта 6: x, y - координаты точки цели на экране оператора в системе координат изображения с камеры робота (известные измеряемые величины), j, k - углы наклона головы робота (известные измеряемые величины), h - высота нахождения видеокамеры (известная измеряемая величина), s - расстояние от подвижного робота 1 до объекта 6 (известная вычисляемая величина). При использовании указанных оптических параметров камеры 3 известными способами вычисляются координаты объекта 6 в системе координат, связанной с роботом 1, и осуществляется перемещение робота 1.
Подвижный робот 1 при автоматическом движении управляется с помощью регуляторов (П, ПИ, ПД или ПИД регуляторов) или с использованием нечеткой логики, или динамического управления. При этом алгоритм управления рассчитывает требуемые угловую и поступательную скорости робота так, чтобы робот минимально отклонялся от спланированной в данный момент траектории. Планирование траекторий в случае наличия или отсутствия препятствий перед роботом осуществляется с помощью методов, описанных в Blanco, J., Gonzalez, J., and Fernandez-Madrigal, J. 2008. Extending obstacle avoidance methods through multiple parameter-space transformations. Auton. Robots 24, 1 (Jan. 2008), 29-48 и в Nearness diagram (ND) navigation: collision avoidance in troublesome scenarios, IEEE Transactions on Robotics and Automation, Minguez, J. and Montano, L., vol. 20, no. 1, pp. 45-59, 2004. Обнаружение препятствий осуществляется с помощью сканирующего лазерного дальномера.
На фиг. 2 изображен подвижный робот 1 (вид сбоку и сверху) и объект 6, образующие оптическую систему камеры 3 при наличии перед роботом 1 препятствий. По указанным известным величинам оптической системы камеры 3 также рассчитывают координаты конечной точки - объекта 6, после чего система управления направляет робота 1 в заданную точку. Указание конечной точки на экране оператора происходит непосредственно по картинке, полученной с камеры 3 робота 1, с помощью указателя мыши и другого устройства с аналогичными функциями. При наличии препятствия или невозможности перемещения в конечную точку из-за препятствия, возникшего уже во время движения, управляемая система останавливается в точке пространства, максимально доступной к конечной точке.
В случае выбора оператором точки, огороженной препятствием, робот 1 самостоятельно перемещается вдоль траектории, сгенерированной на основе информации о карте перемещения (фиг. 3).
Заявляемый способ управления подвижным роботом позволяет:
1. Упростить управление роботами, что снижает количество ошибок операторов при управлении, уменьшает их утомляемость за счет автоматизации процессов движения вдоль траектории, обнаружения и объезда препятствий, а также существенного упрощения процесса управления, выраженного в необходимости только указания конечной точки, в которую робот перемещается самостоятельно.
2. Уменьшить количество однотипных операций управления, выполняемых оператором, при исполнении базовых задач перемещения из точки в точку за счет автоматизации генерации траектории, автоматического движения вдоль нее, автоматического избежания роботом столкновений.
3. Упростить интерфейс пользователя для управления роботом за счет уменьшения количества необходимых действий для управления роботом.
4. Увеличить среднюю скорость перемещения робота из точки в точку за счет более оптимального управления скоростями робота.
5. Не задумываться о габаритах робота и его динамических характеристиках за счет учета данных параметров системой управления при прокладывании траектории и автоматическом движении робота.
Сканирующий лазерный дальномер
Сканирующий лазерный дальномер
Способ и система измерения индекса плотности растительности
Способ нашивки объемных преформ

