Результат интеллектуальной деятельности: Способ и система для прицельного торможения подвижного состава
Вид РИД
Изобретение
Группа изобретений относится к области железнодорожного транспорта, а именно к способу и устройству для прицельного торможения подвижного состава, и может быть использована на платформах закрытого типа, оборудованных пассажирскими дверьми, для точного совмещения дверей состава с дверями платформы.
Известна система и способ для прицельного торможения подвижного состава, раскрытые в авторском свидетельстве СССР №127690, 1960 г. /1/. Система включает установленные в платформе ряд электромагнитных датчиков, а также размещенные на подвижном составе управляющий триггер, который срабатывает при прохождении упомянутых датчиков, и схему счетных триггеров, определяющую количество срабатываний. При работе системы осуществляется замедление подвижного состава на расчетную величину при каждом срабатывании триггера при прохождении датчика до полной остановки состава. Недостатком данной системы является то, что в случае ложного срабатывания или при несрабатывании триггера система получит неверную информацию о положении подвижного состава, что приведет к его остановке в неправильном положении.
Известен способ и система прицельного торможения, использующие радиочастотную идентификацию (см. патент РФ №2397094 /2/ - ближайший аналог). Система содержит по меньшей мере две пассивные радиочастотные метки, установленные на пути следования состава, а также размещенный на подвижном составе считыватель меток. При считывании каждой метки происходит определение координат подвижного состава и осуществляется его замедление в соответствии с рассчитанной кривой торможения. Недостатком данной системы является низкая точность прицельной остановки при совмещении пассажирских дверей подвижного состава с пассажирскими дверями платформы закрытого типа. Кроме того, в устройстве необходимо использовать не менее чем две пассивные радиочастотные метки.
Техническим результатом заявленной группы изобретений является повышение точности остановки состава и точности совмещения его дверей с дверями на платформе, а также исключение вероятности ошибки в определении положения остановки.
Указанный технический результат достигается в заявленном способе прицельного торможения подвижного состава за счет того, что он включает: считывание посредством считывателя подвижного состава радиочастотной идентификационной метки, установленной на пути движения состава перед остановочным пунктом, с обеспечением определения координат подвижного состава и инициирование замедления движения в соответствии с этими координатами, и считывание сенсорами подвижного состава, установленными в зоне дверей подвижного состава, меток, размещенных в зоне дверей платформы остановочного пункта, с обеспечением срабатываний сенсоров и определением количества этих срабатываний, при этом осуществляют снижение скорости на расчетную величину при каждом срабатывании всех сенсоров, проходящих в момент данного срабатывания через метки платформы, с обеспечением остановки подвижного состава и совмещением его дверей с дверями платформы.
Указанный технический результат также достигается в частных вариантах реализации способа за счет того, что:
- полную остановку подвижного состава осуществляют после срабатывания каждого сенсора (j+n-1) раз, где j - порядковый номер сенсора по ходу движения состава, а n - количество меток платформы, которое прошел первый сенсор;
- в качестве сенсоров подвижного состава используют индуктивные сенсоры, а в качестве меток платформы - металлические элементы.
Указанный технический результат достигается в заявленной системе прицельного торможения подвижного состава за счет того, что она содержит радиочастотную идентификационную метку, установленную на пути движения подвижного состава перед остановочным пунктом, ряд меток, установленных на платформе остановочного пункта в зоне дверей платформы, и размещенные в подвижном составе: считыватель радиочастотной метки, сенсоры, установленные в зоне дверей подвижного состава с возможностью срабатывания при прохождении меток платформы, счетчик количества срабатываний сенсоров, контроллер для обработки информации, связанный со счетчиком и считывателем, и блок управления подвижным составом, связанный с контроллером.
Указанный технический результат также достигается в частных вариантах реализации системы за счет того, что:
- в качестве сенсоров подвижного состава использованы индуктивные сенсоры, а в качестве меток платформы - металлические элементы;
- система содержит установленный на подвижном составе одометр или скоростеметр, связанный с контроллером.
Заявленные способ и система прицельной остановки подвижного состава основаны на использовании технологии радиочастотной идентификации места положения подвижного состава перед остановочным пунктом, а также вычислении координаты и исполнении известной кривой торможения при приближении к месту остановки при совмещении пассажирских дверей с пассажирскими дверями платформ закрытого типа.
В отличие от аналогов в заявленном изобретении использован ряд сенсоров, установленных в зоне дверей подвижного состава, которые считывают метки, расположенные в дверях или в зоне дверей платформы, что повышает точность остановки подвижного состава за счет исключения ошибки в определении положения состава при ложных срабатываниях сенсоров подвижного состава (например, на посторонние элементы). Кроме того, установка сенсоров в зоне каждой двери обеспечивает повышение точности совмещения дверей состава с дверями платформы в случае небольших изменений в длине сцепки между вагонами.
Изобретение поясняется чертежами, где:
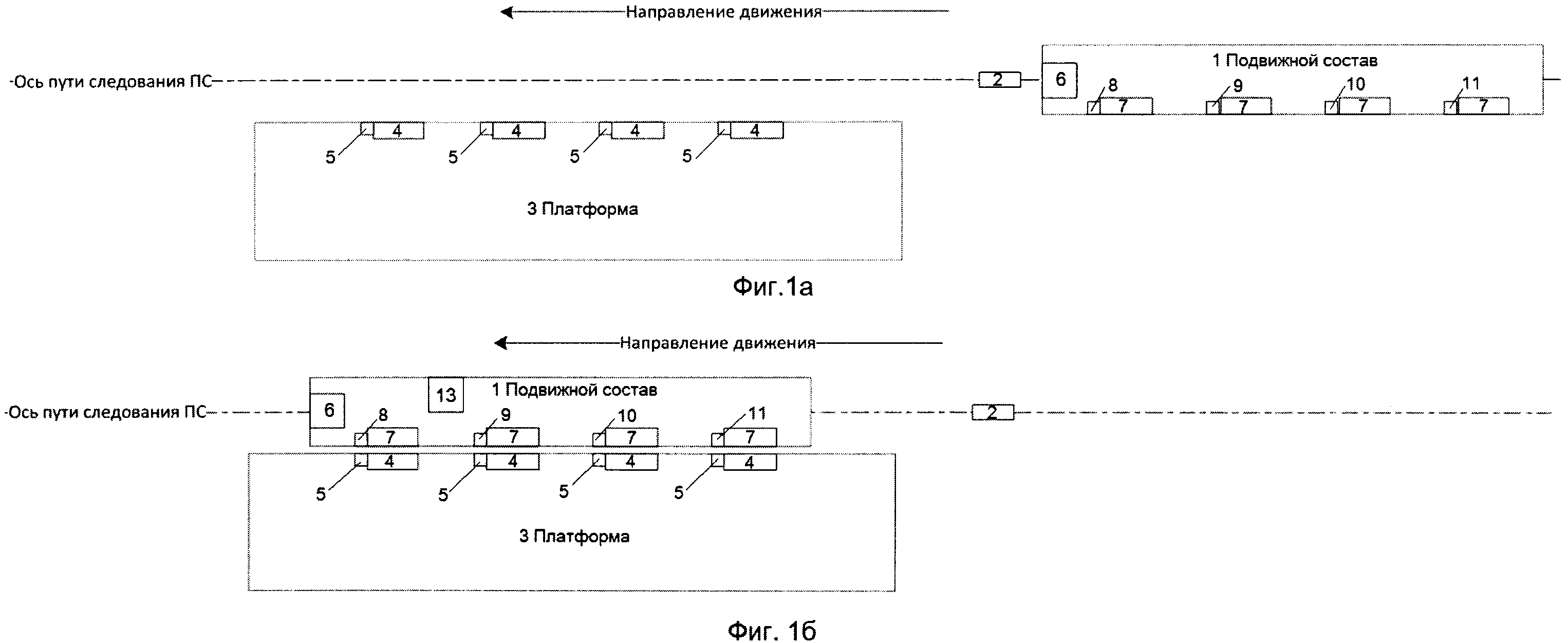
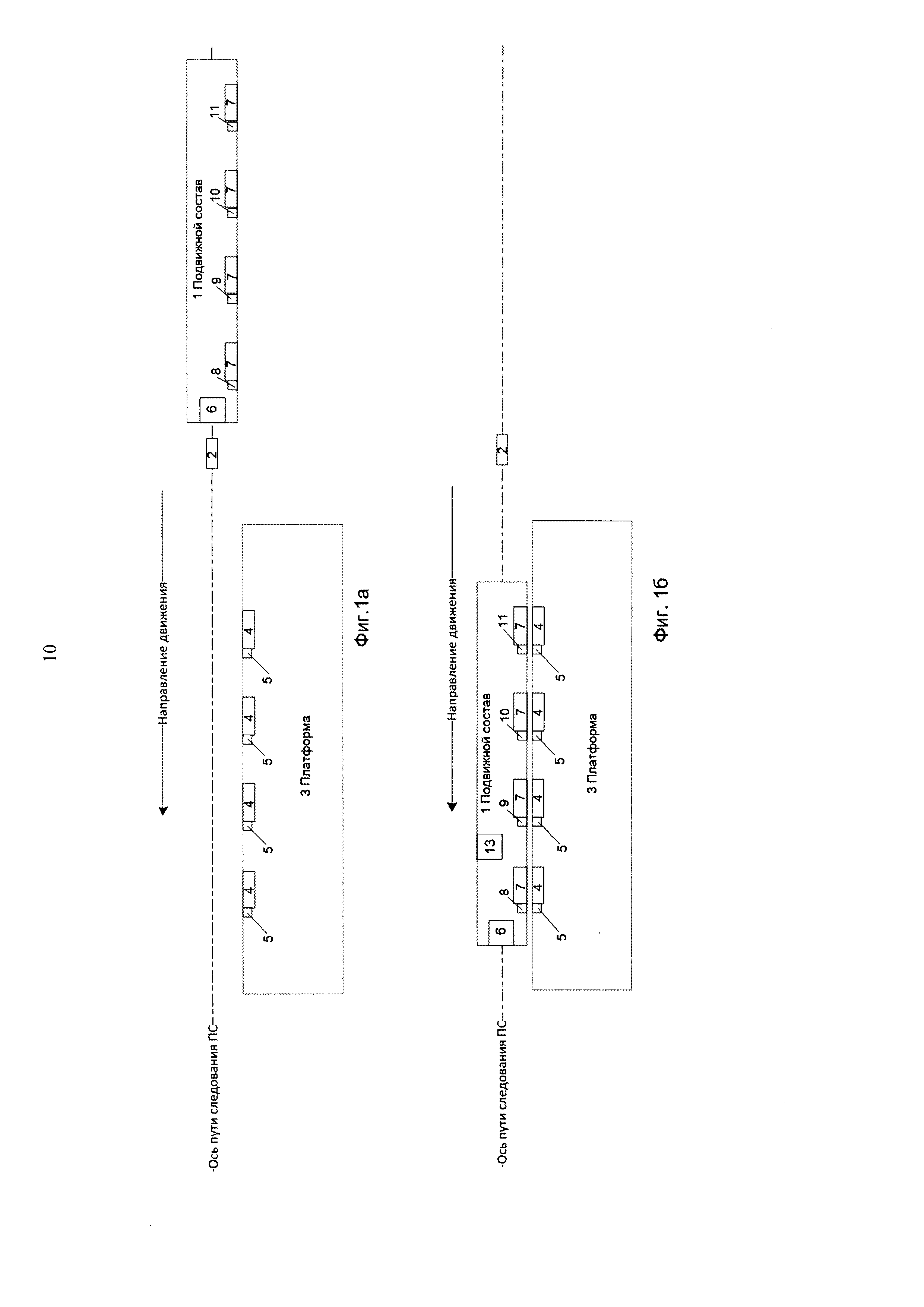
на фиг. 1 показаны платформа и подвижной состав при его подходе к остановке (а) и при его непосредственной остановке (б);
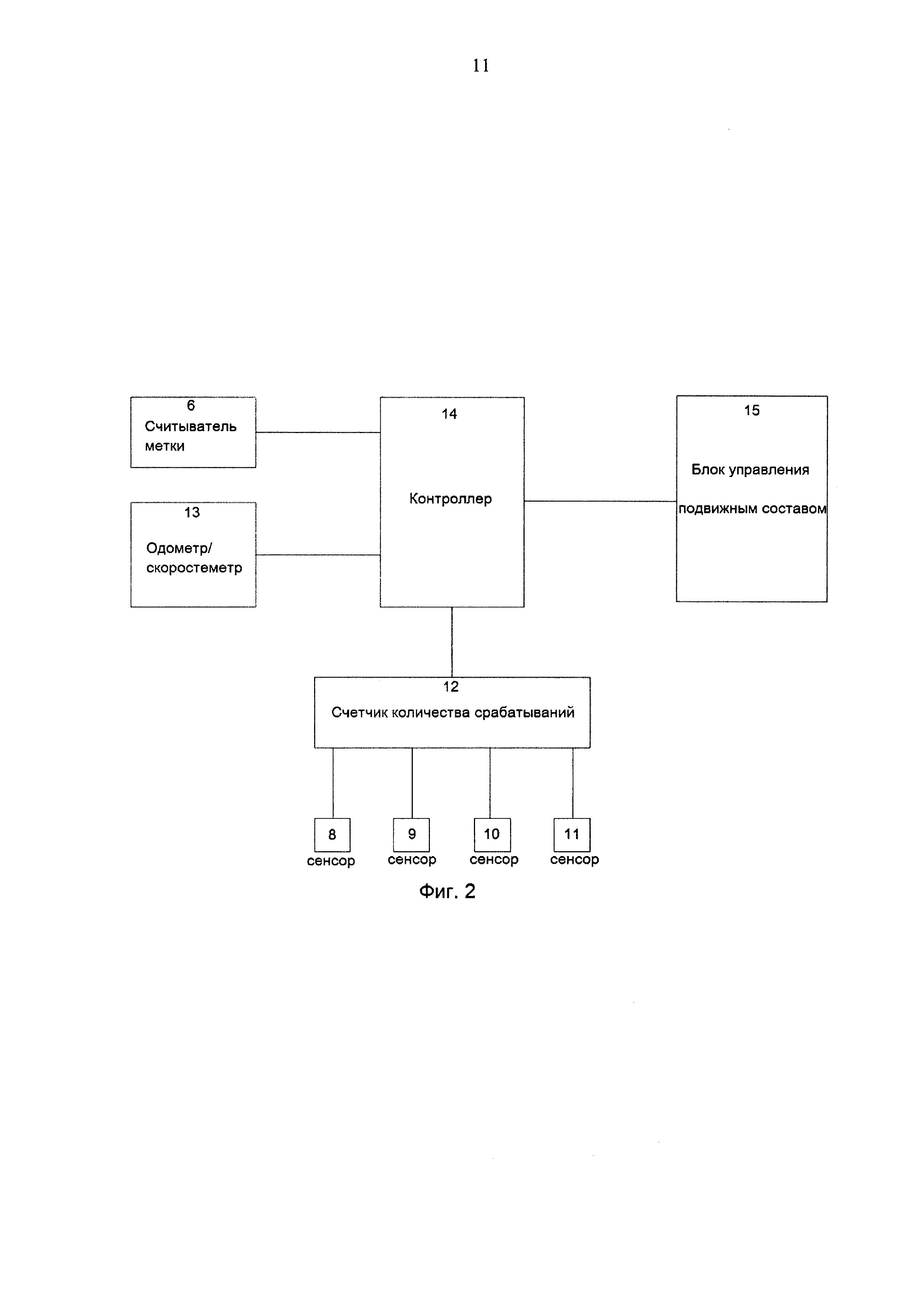
на фиг. 2 показана схема элементов системы, размещенных на подвижном составе.
Система содержит установленную на пути следования подвижного состава (1) радиочастотную метку (2) (RFID метку), например метку Sofis ID фирмы Siemens. На платформе (3) остановочного пункта в зоне каждой двери (4) установлено по одной дополнительной метке (5), в качестве которых могут быть использованы, например, металлические элементы. На подвижном составе (1) в его головной части размещен считыватель (6) радиочастотной метки, например считыватель Sofis reader фирмы Siemens. Кроме того, в зоне каждой двери (7) подвижного состава установлено по одному сенсору (8, 9, 10, 11), выполненному с возможностью срабатывания при прохождении дополнительных меток (5) платформы (3), где 8 - первый, 9 - второй, 10 - третий, 11 - четвертый сенсоры по ходу движения состава (1). В качестве сенсоров могут быть использованы, например, индуктивные датчики. Сенсоры (8, 9, 10, 11) соединены со счетчиком (12) числа срабатываний сенсоров. Кроме того, система может содержать одометр или скоростеметр (13). Счетчик (12), одометр (13) и считыватель (6) связаны с контроллером (14), который предназначен для обработки и передачи информации (скорость, пройденный путь, торможение, остановка) в блок (15) управления подвижным составом, осуществляющий управление торможением.
Заявленный способ прицельного торможения с использованием описанной системы реализуется следующим образом.
При подходе к остановочному пункту (платформе (3) станции) подвижной состав (1) следует через радиочастотную идентификационную метку положения (2). При этом данные о местоположении состава (1) от метки (2) передаются через считыватель (6) в контроллер (14), который дает команду в блок управления (15) подвижным составом на замедление движения. В результате, подвижной состав (1) снижает скорость при подходе к месту остановки, например, до 5 км/ч. При этом скорость контролируется с помощью одометра или скоростемера (13). После снижения скорости блок управления (15) подвижным составом включает режим поиска дополнительных меток (5) платформы (3).
При прохождении подвижного состава дополнительных меток (5) платформы осуществляется их считывание сенсорами (8, 9, 10, 11) подвижного состава (1), при котором осуществляется ряд срабатываний одного (для первого срабатывания) или нескольких (для второго и последующего срабатываний) сенсоров (8, 9, 10, 11). При этом для полной остановки состава (1) каждый сенсор должен сработать (j+n-1) раз, где j - порядковый номер сенсора по ходу движения состава, а n - количество меток платформы, которое прошел первый сенсор (8).
В случае, когда количество сенсоров (8) подвижного состава соответствует количеству меток (5), т.е. количество дверей (4) на платформе (3) и дверей (7) на подвижном составе (1) одинаково и равно, например, четырем (как показано на фиг. 1), до полной остановки состава первый сенсор (8) срабатывает 4 раза, второй - 3 раза, третий - 2 раза и четвертый - 1 раз. При каждом таком срабатывании блок управления (15) осуществляет снижение скорости состава на расчетную величину в соответствии с кривой торможения. Для исключения ошибки при ложном срабатывании одного из сенсоров указанное замедление при каждом срабатывании осуществляется, только когда сработала вся группа сенсоров, которая проходит через метки (5) в момент этого срабатывания, т.е. при первом срабатывании - только первый сенсор (8), при втором срабатывании - первый (8) и второй (9) сенсоры, при третьем срабатывании - первый (8), второй (9) и третий (10) сенсоры и т.д. В других случаях, когда на платформе (3) количество дверей (4) больше, чем на подвижном составе, для смены места остановки у платформы изменяют условия по количеству срабатывания сенсоров. Кроме того, можно дополнительно отслеживать одновременность i-го срабатывания j+1-го сенсора с i+1 срабатыванием j-того сенсора, где i - порядковый номер срабатывания, j - порядковый номер сенсора.
В результате, при последнем срабатывании сенсора подвижной состав (1) останавливается полностью с обеспечением совмещения его дверей (7) с дверями (4) платформы.
Таким образом, преимуществами заявленной группы изобретений являются:
- использование не более одной радиочастотной метки;
- высокая точность остановки подвижного состава;
- возможность сокращения времени подтягивания подвижного состава от входной радиочастотной метки до точки остановки за счет возможности ступенчатого снижения скорости движения с момента срабатывания первого сенсора;
- возможность оперативного изменения точки остановки в пределах пассажирской платформы при изменении длины подвижного состава или длины платформы.
Способ восстановления движения поездов на участке железной дороги с использованием мобильного комплекса микропроцессорной системы управления стрелками и светофорами
Мобильный комплекс микропроцессорной системы управления стрелками и светофорами участка железной дороги
Способ восстановления движения поездов на участке железной дороги с использованием мобильного комплекса микропроцессорной системы управления стрелками и светофорами
Мобильный комплекс микропроцессорной системы управления стрелками и светофорами участка железной дороги
Система маневровой автоматической локомотивной сигнализации (малс)
Система горочной автоматической локомотивной сигнализации с использованием радиоканала (галс р)
Интеллектуальный блок управления горочным стрелочным электроприводом
Способ определения активности патологического процесса у больных рассеянным склерозом
Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки

