Результат интеллектуальной деятельности: СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Система автоматизированного модального управления бокового движения летательного аппарата.
Изобретение относится к области систем автоматического управления (САУ) боковым движением летательного аппарата (ЛА).
Известные способы построения САУ, обеспечивающих управление боковым движением высокоманевренного ЛА, описаны, в частности, в патентах RU 2096263, В64С 13/18, опубл. 1997.11.20; RU 2272747, В64С 13/18, опубл. 2006.03.27; в а.с. SU 749030, В64С 13/18, опубл. 2004.10.27.
Для реализации известных способов управления ЛА применяют методы модального управления, основанные на выборе полюсов передаточной функции замкнутой системы или корней ее характеристического уравнения. Если все составляющие вектора состояния объекта могут быть измерены и модель динамики объекта линейна, то обеспечение заданного расположения корней замкнутой системы не вызывает трудности. Требуемое расположение корней характеристического уравнения для каждого объекта определяется в отдельности.
Если передаточная функция замкнутой системы не содержит нулей, то решение задачи требуемого расположения корней характеристического уравнения можно осуществить с помощью классического метода стандартных коэффициентов. Далее оценка соответствия полученных коэффициентов знаменателя передаточной функции оценивается по характеру переходных процессов в замкнутой системе [1].
Существующие методы автоматического управления ЛА требуют корректировки в полете передаточных чисел законов управления в зависимости от изменения угла атаки при изменении аэродинамических и массо-инерционных характеристик объекта.
Наиболее близкой по достигаемому техническому результату, выбранной в качестве прототипа, принимается САУ боковым движением ЛА, реализующая способ автоматического управления боковым движением высокоманевренного самолета, при котором в качестве параметра, связанного с воздействием летчика, используют перемещение ручки управления, при этом в каналах крена и рысканья формируют сигналы управления, пропорциональные перемещению ручки управления, с использованием префильтров, а также формируют демпфирующие изодромированные сигналы угловых скоростей крена и рысканья, величины которых при их малых значениях приравнивают нулю, сформированные сигналы суммируют, полученные суммарные сигналы динамически ограничивают посредством интегрирующих звеньев соответствующих префильтров каналов крена и рысканья, для чего используют данные сигналы в качестве сигналов обратной связи, которые поступают на входы интегрирующих звеньев в том случае, если абсолютные величины этих сигналов превышают величины ограничения, и дополнительно суммируют эти сигналы с соответствующими демпфирующими изодромированными сигналами угловых скоростей крена и рысканья, которые ранее приравнивались нулю, сформированные сигналы управления подают на входы соответствующих приводов и под их воздействием отклоняют элероны и руль направления [2].
Поставленная задача, которую решает это изобретение, достигается тем, что система автоматического управления боковым движением летательного аппарата, содержит датчик угловой скорости крена, первый изодромный фильтр, первый ограничитель, первое звено с зоной нечувствительности, первый сумматор, привод элеронов, элероны, датчик положения ручки управления, первый префильтр, третий сумматор, первое звено с зоной нечувствительности и ограничением, второй префильтр, датчик угловой скорости рысканья, второй изодромный фильтр, второй ограничитель, второе звено с зоной нечувствительности, четвертый сумматор, второе звено с зоной нечувствительности и ограничением, второй сумматор, привод руля направления и руль направления.
Недостатком этого изобретения является необходимость корректировки в полете передаточных чисел законов управления в зависимости от изменения угла атаки, при изменении аэродинамических и массо-инерционных характеристик объекта и результат работы такого регулятора не удовлетворяет требованиям летчика по обеспечению минимума психической и физической нагрузок при работе по наземным и воздушным целям.
Технический результат предлагаемого авторами изобретение заключается в решении задачи улучшения характеристик управления ЛА с помощью построения алгоритма синтеза управления ЛА в боковой плоскости.
Технический результат достигается за счет того, что если с помощью руля направления удается ликвидировать угол скольжения, то в итоге движение ЛА в боковой плоскости можно разделить на два изолированных движения крена и рысканья. При этом уравнения сил и моментов в боковой плоскости приобретают вид уравнений сил и моментов в продольном движении, угол атаки α меняется на угол скольжения β, угловая скорость тангажа ωz на угловую скорость рысканья ωy, а  (производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы крыла по углу атаки) и
(производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы крыла по углу атаки) и  (производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы по рулю высоты) соответственно на
(производная приведенной к произведению массы ЛА на скорость установившегося полета аэродинамической подъемной силы по рулю высоты) соответственно на  (производная приведенной к произведению массы ЛА на скорость установившегося полета боковой аэродинамической силы по углу скольжения) и
(производная приведенной к произведению массы ЛА на скорость установившегося полета боковой аэродинамической силы по углу скольжения) и  (производная приведенной к произведению массы ЛА на скорость установившегося полета боковой аэродинамической силы по рулю направления) с обратным знаком. Таким образом, зависимости по критерию оптимальной управляемости Шомбе-ра-Гертсена для продольного движения распространяются на боковое движение [3].
(производная приведенной к произведению массы ЛА на скорость установившегося полета боковой аэродинамической силы по рулю направления) с обратным знаком. Таким образом, зависимости по критерию оптимальной управляемости Шомбе-ра-Гертсена для продольного движения распространяются на боковое движение [3].
Следовательно, для бокового движения также применим подход, основанный на модальном управлении, где в качестве эталонной модели используются две изолированные системы линеаризованных уравнений движения ЛА по крену и рысканью, а в зависимости от скоростного напора будут назначаться коэффициенты  и
и  (производная приведенного к моменту инерции вокруг связанной оси Oy момента рысканья по углу скольжения), которые обеспечивают заданное распределение корней характеристического многочлена замкнутой системы.
(производная приведенного к моменту инерции вокруг связанной оси Oy момента рысканья по углу скольжения), которые обеспечивают заданное распределение корней характеристического многочлена замкнутой системы.
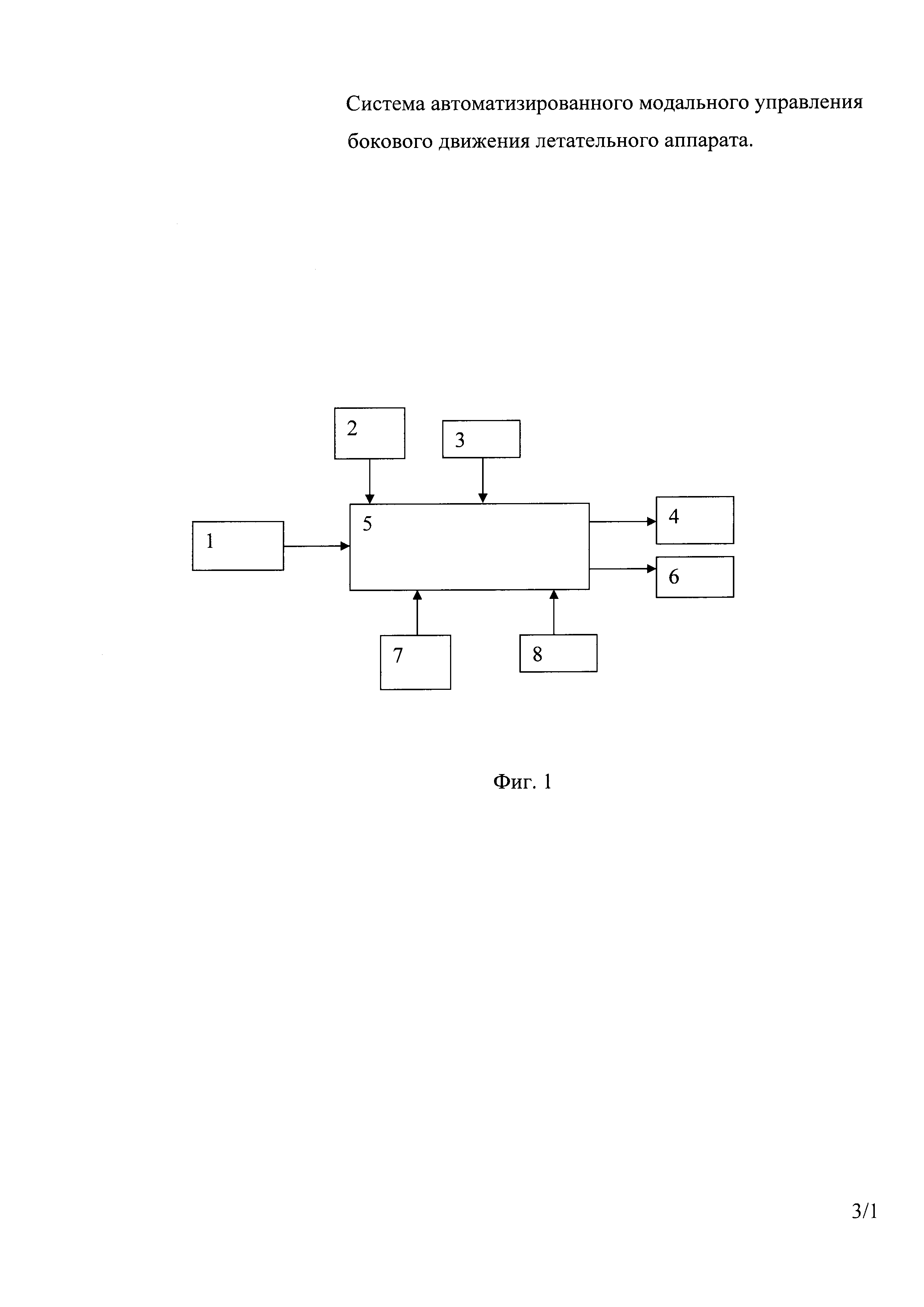
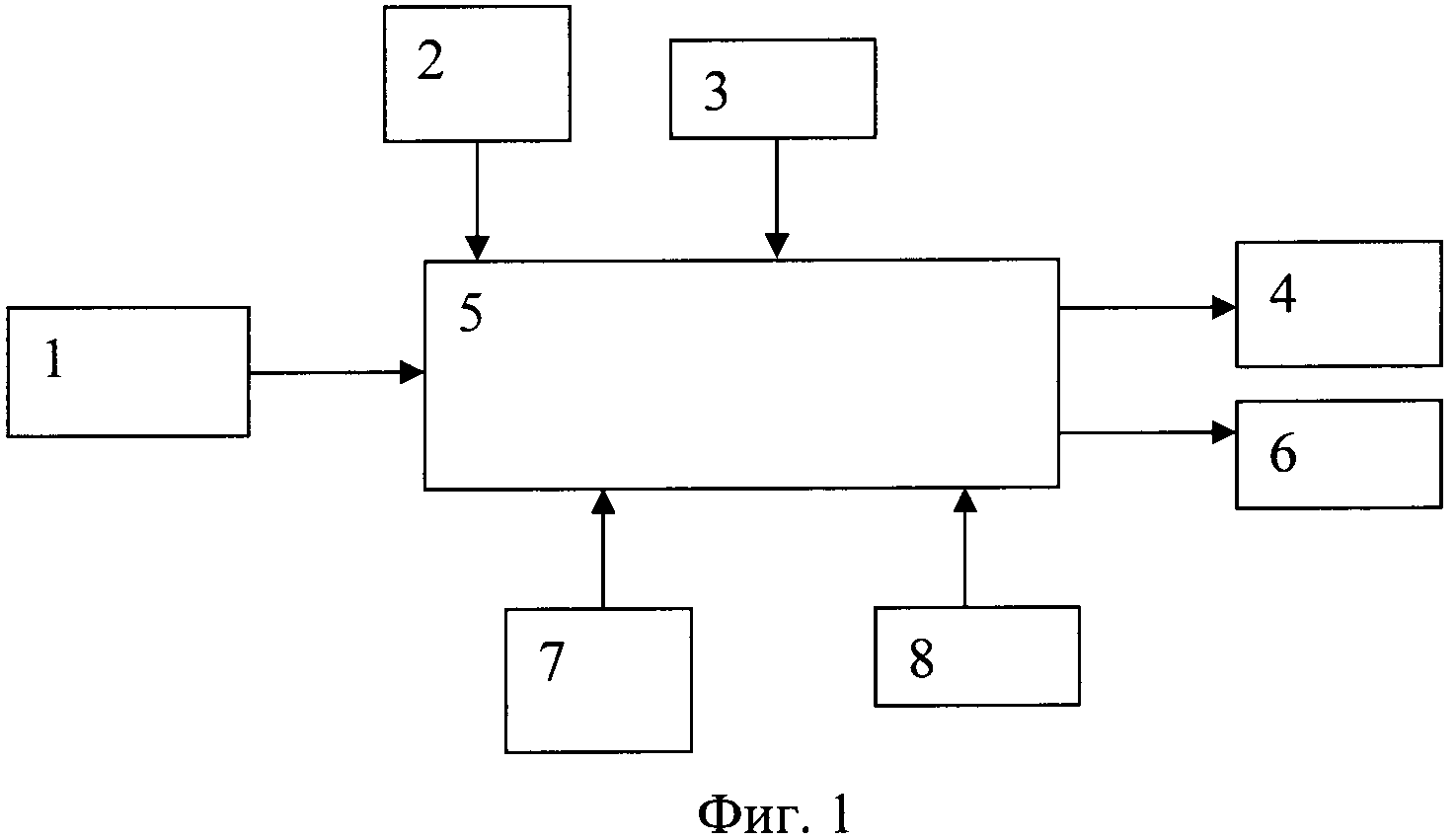
На фигуре 1 представлена функциональная схема дистанционной резервированной системы автоматизированного модального управления боковым движение ЛА.
ОПР - ограничитель предельных режимов 1, ручка летчика/задатчик 2, ДУС - датчик угловых скоростей 3, гидравлический привод элеронов 4, вычислитель модального алгоритма управления 5, гидравлический привод руля направления 6, блок балансировки 7, СВС - система воздушных сигналов 8.
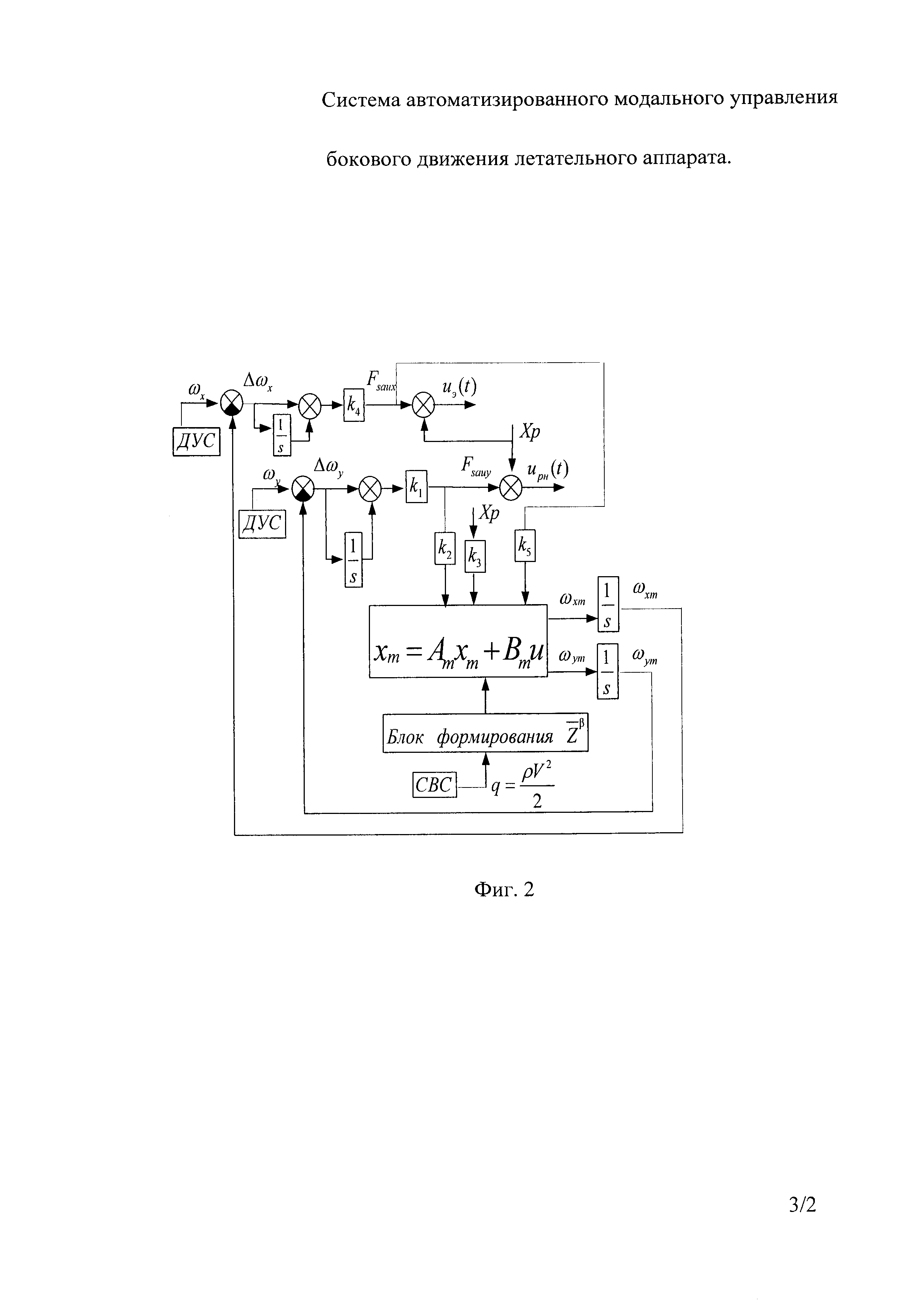
На фигуре 2 представлена структурная схема САУ:
xm - вектор состояния модели, Am - (n×n) и Bm - (n×1) - матрицы известных параметров желаемой модели, uэ(t) - управление элеронами, uн(t) - управление рулями направления, q - скоростной напор, Хр - сигнал с ручки летчика (задатчика), ωх - выходной сигнал с датчика угловой скорости крена ЛА, ωу - выходной сигнал с датчика угловой скорости рысканья ЛА, ωхm - выходной сигнал по угловой скорости крена с желаемой эталонной модели, ωym - выходной сигнал по угловой скорости рысканья с желаемой эталонной модели.
Система автоматизированного модального управления боковым движением летательных аппаратов, содержащая датчик угловой скорости крена, первый изодромный фильтр, первый ограничитель, первое звено с зоной нечувствительности, первый сумматор, привод элеронов, элероны, датчик положения ручки управления, первый префильтр, третий сумматор, первое звено с зоной нечувствительности и ограничением, второй префильтр, датчик угловой скорости рысканья, второй изодромный фильтр, второй ограничитель, второе звено с зоной нечувствительности, четвертый сумматор, второе звено с зоной нечувствительности и ограничением, второй сумматор, привод руля направления и руль направления. В отличии от прототипа в САМУ дополнительно введен вычислитель алгоритма модального управления (ВАМУ) ЛА с блоком формирования сигналы управления по правилам:


где uэ - управляющий сигнал на входе привода элеронов;
uрн - управляющий сигнал на входе привода руля направления;
Хр - сигнал с ручки пилота;
ki - масштабные коэффициенты закона управления,
Для формирования сигнала управления ЛА в боковом движении используются данные об угловых скоростях крена и рысканья, получаемые от датчиков угловых скоростей ЛА и из желаемых эталонных моделей, соответственно крена и рысканья. Параметры эталонной желаемой модели рысканья настраиваются программным блоком формирования  в соответствии с критерием Шомбера-Гертсена для продольного канала в зависимости от величины скоростного напора от СВС. А передаточная функция желаемой эталонной модели по угловой скорости крена имеет следующий вид:
в соответствии с критерием Шомбера-Гертсена для продольного канала в зависимости от величины скоростного напора от СВС. А передаточная функция желаемой эталонной модели по угловой скорости крена имеет следующий вид:

где на основании характеристик, полученных при работе летчика-испытателя на стенде, были определены следующие величины kωx (коэффициента передачи) и Тωх (постоянной времени): kωх=10, Tωх=0,25 с.
Кроме того, с целью обеспечения заданного качества управления во всей области применения ЛА при изменении аэродинамических и массоинерционных характеристик, в ВАМУ введен блок формирования сигнала усредненного приведенного коэффициента боковой аэродинамической силы ( ) в зависимости от условий полета по высоте и скорости полета, введен блок эталонной передаточной функции системы с двумя изолированными системами линеаризованных уравнений движения ЛА по крену и рысканью, введены два блока невязки (Δωx, Δωу), на первый вход блока невязки Δωу поступает сигнал с выхода датчика угловой скорости рысканья (ωу), на второй вход - сигнал угловой скорости рысканья с выхода блока передаточной функции (ωym), сумма масштабированных астатического сигнала (Δωy/р) и сигнала невязки (Δωу) с выхода блока невязки поступает на вход электрогидравлического привода руля направления, а также на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика (задатчика), на первый вход блока невязки Δωх поступает сигнал с выхода датчика угловой скорости крена (ωх), на второй вход - сигнал угловой скорости крена с выхода блока передаточной функции (ωxm), сумма масштабированных астатического сигнала (Δωx/р) и сигнала невязки (Δωх) с выхода блока невязки поступает на вход электрогидравлического привода элеронов, а также на третий вход блока передаточной функции.
) в зависимости от условий полета по высоте и скорости полета, введен блок эталонной передаточной функции системы с двумя изолированными системами линеаризованных уравнений движения ЛА по крену и рысканью, введены два блока невязки (Δωx, Δωу), на первый вход блока невязки Δωу поступает сигнал с выхода датчика угловой скорости рысканья (ωу), на второй вход - сигнал угловой скорости рысканья с выхода блока передаточной функции (ωym), сумма масштабированных астатического сигнала (Δωy/р) и сигнала невязки (Δωу) с выхода блока невязки поступает на вход электрогидравлического привода руля направления, а также на первый вход блока передаточной функции, второй вход которого соединен с выходом датчика ручки летчика (задатчика), на первый вход блока невязки Δωх поступает сигнал с выхода датчика угловой скорости крена (ωх), на второй вход - сигнал угловой скорости крена с выхода блока передаточной функции (ωxm), сумма масштабированных астатического сигнала (Δωx/р) и сигнала невязки (Δωх) с выхода блока невязки поступает на вход электрогидравлического привода элеронов, а также на третий вход блока передаточной функции.
Предложенный способ формирования сигнала управления линеаризует итоговую нелинейную модель объекта. Существенное преимущество предложенного подхода проявляется при управлении самолетом на больших углах атаки, когда характеристики ЛА существенно нелинейны. В итоге нет необходимости ввода в САУ дополнительных сигналов управления.
Литература
1. Михалев А.И. и др. Системы автоматического управления самолетом. М., Машиностроение, 1987, с. 174.
2. Патент RU 2383467. Способ автоматического управления боковым движением высокоманевренного самолета, авторы Можаров В.А., Воробьев А.В., Штейнгардт Б.Х., МПК В64С 13/18, опубл. 10.03.2010.
3. Shomber Н., Gertsen W. «Longitudinal Handing Qualities Griteria: an Evaluation» AIAA Paptr, N65-780, 1965 y.



Способ траекторного управления беспилотным летательным аппаратом для облета рельефа местности в вертикальной плоскости
Способ и система совместной обработки измерений дальности и скорости для многодиапазонной радиолокационной системы кругового обзора
Датчик температуры электронного модуля
Устройство для очистки и химической металлизации отверстий заготовок печатных плат
Автоматизированная система контроля территорий и управления силами и средствами охраны
Робототехнический комплекс разминирования
Устройство защиты радиоэлектронной аппаратуры при воздействии на неё импульсного ионизирующего излучения
Способ аутентификации электронного изображения (варианты)
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных летательных аппаратов с повышенной адаптацией к маневру носителя и система для его реализации
Способ экранирования в электронном модуле
Способ траекторного управления беспилотным летательным аппаратом для облета рельефа местности в вертикальной плоскости
Способ и система совместной обработки измерений дальности и скорости для многодиапазонной радиолокационной системы кругового обзора
Датчик температуры электронного модуля
Устройство для очистки и химической металлизации отверстий заготовок печатных плат
Автоматизированная система контроля территорий и управления силами и средствами охраны
Робототехнический комплекс разминирования
Способ арифметического кодирования с шифрованием
Устройство защиты радиоэлектронной аппаратуры при воздействии на неё импульсного ионизирующего излучения
Способ аутентификации электронного изображения (варианты)
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных летательных аппаратов с повышенной адаптацией к маневру носителя и система для его реализации

