Результат интеллектуальной деятельности: Функциональная структура корректировочного возвратно-поступательного продольного перемещения как тороидальной робототехнической системы, так и подвижной части хирургического стола для выполнения конкретной медицинской процедуры (Вариант Русской логики - Версия 3)
Вид РИД
Изобретение
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры (см. Патент RU №2563723), включающая корпус медицинского хирургического стола, который выполнен из неподвижной в продольном направлении нижней части медицинского стола и с возможностью возвратно-поступательного смещения верхней части медицинского стола, в котором в нижней продольной его части симметрично на некотором расстоянии друг от друга с равным шагом закреплены опорные подшипники продольного смещения, которые с возможностью продольного смещения расположены на верхней поверхности неподвижной в продольном направлении нижней части медицинского стола, а между рядами опорных подшипников зафиксированы или выполнены две линейные шестеренки, которые функционально соединены с первой и второй шестеренками соответственно, а также включает привод с редуктором возвратно-поступательного смещения верхней части медицинского стола, а также включает привод с редуктором продольного возвратно-поступательного смещения корпуса робототехнической системы вместе с выдвижными элементами вдоль хирургического стола для проведения медицинских процедур, при этом шестеренка привода с редуктором продольного возвратно-поступательного смещения функционально соединена с промежуточной шестеренкой, которая зафиксирована на общей оси, на концах которой закреплены исполнительные шестеренки возвратно-поступательного смещения корпуса робототехнической системы с выдвижными элементами, а также включает дополнительные подшипники, при этом неподвижная в продольном направлении нижняя часть медицинского стола выполнена из двух соединенных между собой половин, между которыми неподвижно расположены дополнительные подшипники, и они позиционно закреплены на общей оси между двумя исполнительными шестеренками и возвратно-поступательного смещения корпуса робототехнической системы, которые функционально соединены с первой и второй дополнительными линейными шестеренками, которые закреплены или выполнены на горизонтально ориентированных частях первого и второго уголков, которые расположены на верхней поверхности противоположных в продольном направлении продольных частях нижней половины неподвижного медицинского стола, а на вертикально ориентированных частях как первого уголка, так и второго уголка с равным шагом зафиксированы дополнительные подшипники, функционально связанные с верхней поверхностью на противоположных продольных частей нижней половины неподвижного медицинского стола, при этом на вертикально ориентированной части как на первом уголке, так и на втором уголке закреплены нижние концы двух изогнутых стержней, верхние концы которых зафиксированы в нижней части корпуса тороидальной робототехнической системы с выдвижными элементами, который выполнен тороидальной формы с выдвижной крышкой (прототип).
Известный прототип имеет технические возможности, которые заключаются в том, что может быть реализована процедура продольного относительного смещения как верхней части медицинского стола, так и тороидальной робототехнической системы с выдвижными элементами.
Недостатком известной функциональной структуры корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры является ограниченность возвратно-поступательного смещения верхней части медицинского стола, и она не позволяет переместить верхнюю часть медицинского стола на неподвижную часть другого медицинского стола с томографом.
Техническим результатом предложенного изобретения является усовершенствование известной функциональной структуры корректировочного возвратно-поступательного продольного перемещения как тороидальной робототехнической системы, так и подвижной части хирургического стола для выполнения конкретной медицинской процедуры.
Указанный технический результат достигается следующей функциональной структурой. Функциональная структура корректировочного возвратно-поступательного продольного перемещения как тороидальной робототехнической системы, так и подвижной части хирургического стола для выполнения конкретной медицинской процедуры, которая выполнена из зафиксированных между собой двух нижних частей, неподвижных в продольном направлении медицинского стола, и верхней части медицинского стола с возможностью возвратно-поступательного смещения вдоль неподвижной части медицинского стола, в котором в нижней продольной его части симметрично на некотором расстоянии друг от друга с равным шагом закреплены опорные подшипники для продольного его смещения, которые расположены на верхней поверхности неподвижной нижней части медицинского стола, а между рядами опорных подшипников зафиксированы или выполнены две линейные шестеренки, которые функционально соединены с первой и второй шестеренками соответственно, и включает первый привод с редуктором возвратно-поступательного смещения верхней части медицинского стола, а также включает второй привод с редуктором продольного возвратно-поступательного смещения корпуса робототехнической системы с выдвижной крышкой вместе с выдвижными элементами вдоль хирургического стола для проведения медицинских процедур, коническая шестеренка второго привода с редуктором функционально соединена с промежуточной шестеренкой, которая закреплена в средней части первой общей оси стержня с двумя фиксирующими подшипниками, которые закреплены между двумя нижними неподвижными в продольном направлении частями медицинского стола в средней его части, на концах которой зафиксированы исполнительные шестеренки возвратно-поступательного смещения корпуса робототехнической системы с выдвижной крышкой с электромагнитными фиксаторами с корпусами медицинских инструментов и с выдвижными элементами, при этом исполнительные шестеренки первой общей оси стержня функционально соединены с зубчатой линейной шестеренкой Г-образной пластины с одной стороны неподвижного корпуса медицинского стола и с другой его стороны, на которых закреплены два последовательно расположенных опорных подшипника для возвратно-поступательного продольного смещения по верхней поверхности нижней части неподвижной в продольном направлении медицинского стола, а также на Г-образных пластинах зафиксированы изогнутые две пары опорных стержней для удержания тороидальной робототехнической системы, при этом компланарно первой общей оси стержня на некотором расстоянии от нее по обе его стороны расположены два дополнительных стержня с двумя первыми и вторыми шестеренками, которые позиционно расположены и функционально связаны с первой и второй линейными шестеренками верхней части медицинского стола для возвратно-поступательного смещения и посредством двух пар подшипников также закреплены между двумя нижними неподвижными в продольном направлении частями медицинского стола, при этом в средней части двух дополнительных стержней зафиксированы конические шестеренки, которые функционально связаны с коническими шестеренками первого привода с редуктором и дополнительного привода с редуктором соответственно для возвратно-поступательного смещения верхней части медицинского стола.
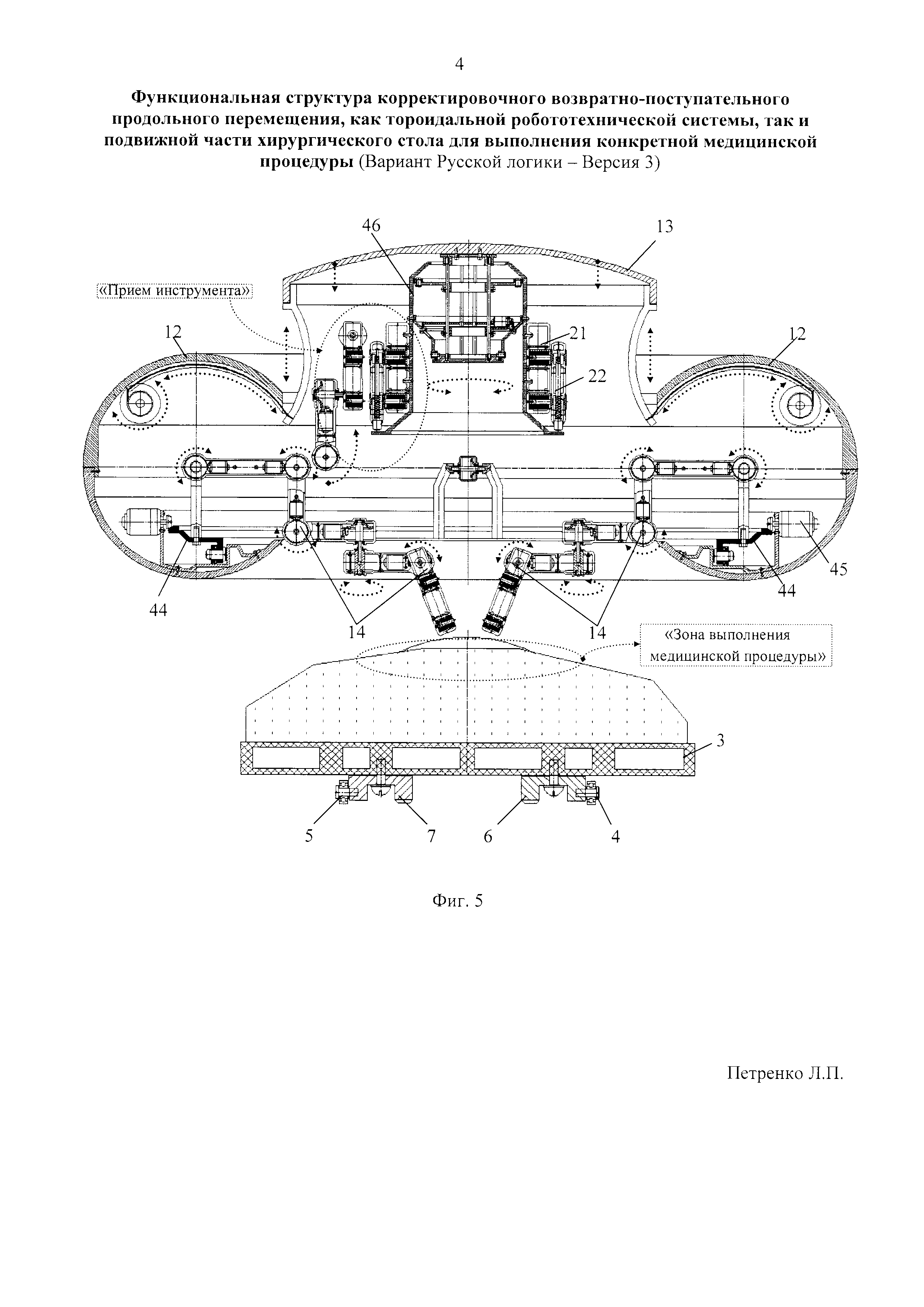
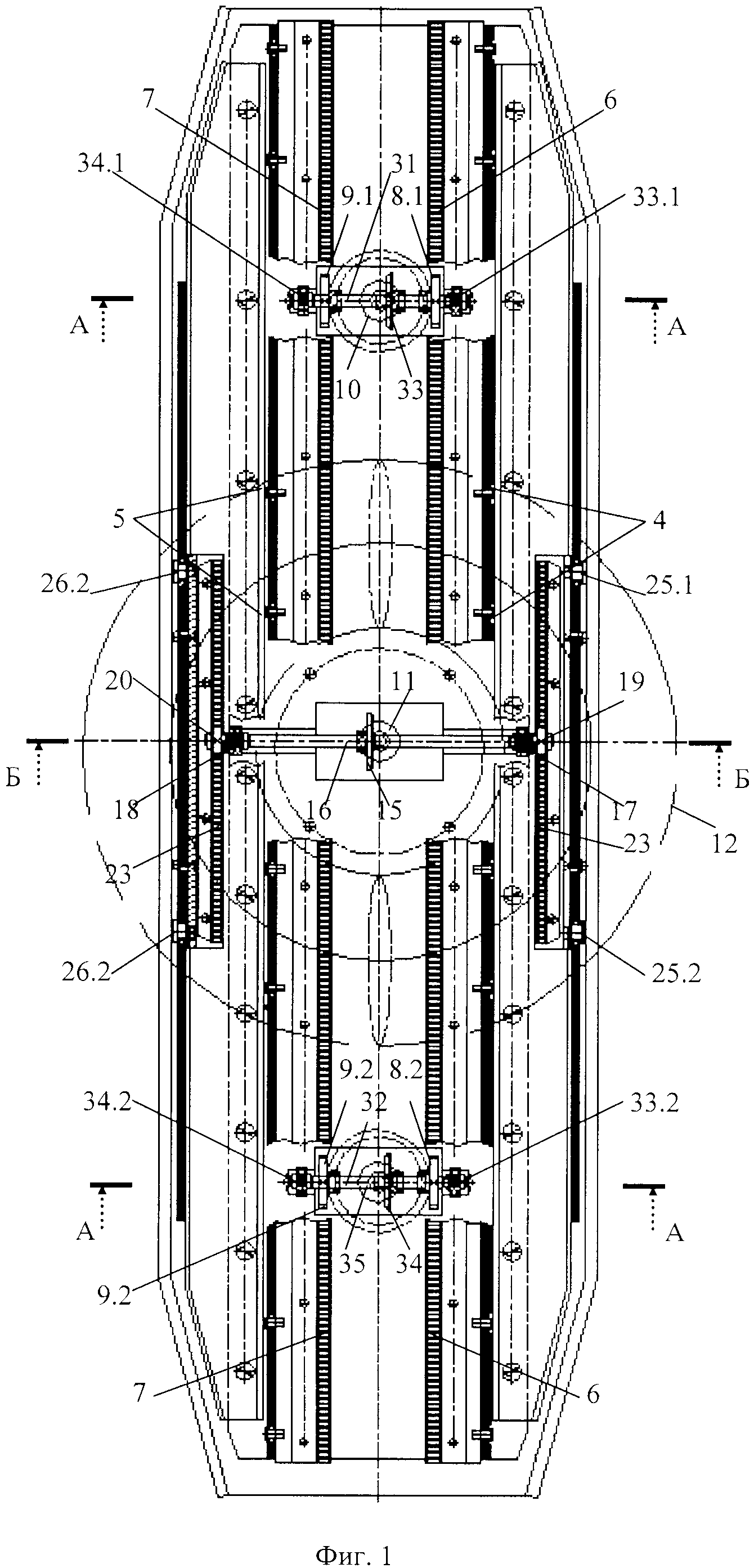
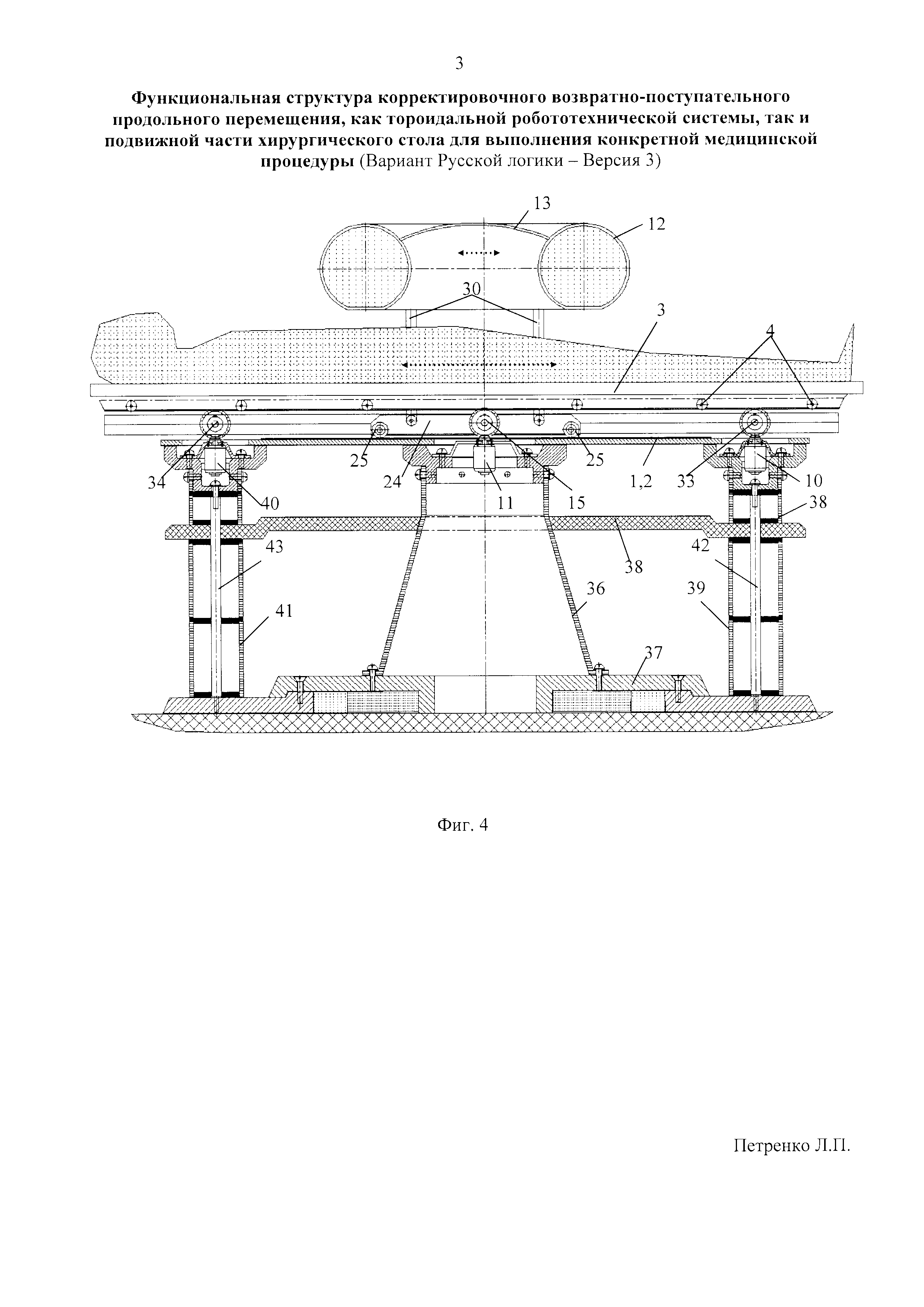
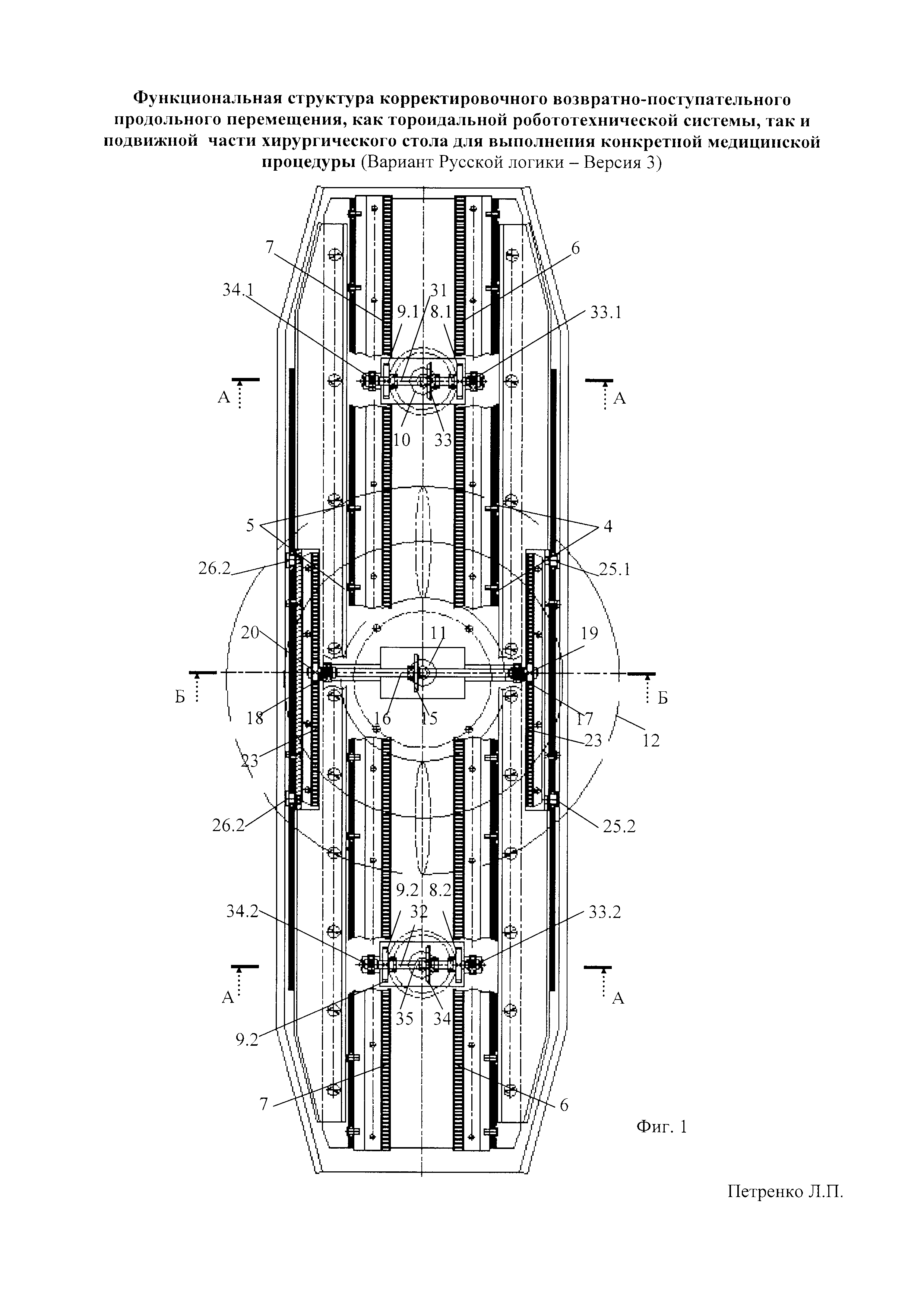
На фиг. 1-4 изображена функциональная структура корректирующего возвратно-поступательного продольного перемещения тороидальной робототехнической системы вдоль хирургического стола для выполнения конкретной медицинской процедуры. На фиг. 5 изображена тороидальная робототехническая система с выдвижной крышкой и исполнительными выдвижными элементами для выполнения различных медицинских процедур.
Функциональная структура корректировочного возвратно-поступательного продольного перемещения как тороидальной робототехнической системы, так и подвижной части хирургического стола для выполнения конкретной медицинской процедуры, которая выполнена из зафиксированных между собой двух нижних частей 1 и 2 (фиг. 2, 3), неподвижных в продольном направлении медицинского стола, и верхней части 3 медицинского стола с возможностью возвратно-поступательного смещения вдоль неподвижной части 1 и 2 медицинского стола, в котором в нижней продольной его части симметрично на некотором расстоянии друг от друга с равным шагом закреплены опорные подшипники 4 и 5 для продольного его смещения, которые расположены на верхней поверхности неподвижной нижней части 1 и 2 медицинского стола, а между рядами опорных подшипников 4 и 5 зафиксированы или выполнены две линейные шестеренки 6 и 7, которые функционально соединены с первой 8 и второй 9 шестеренками соответственно, и включает первый привод с редуктором 10 возвратно-поступательного смещения верхней части 3 медицинского стола, а также включает второй привод с редуктором 11 (фиг. 1, 3 и 4) продольного возвратно-поступательного смещения корпуса робототехнической системы 12 с выдвижной крышкой 13 вместе с выдвижными элементами 14 (фиг. 5) вдоль хирургического стола для проведения медицинских процедур, коническая шестеренка второго привода с редуктором 11 (фиг. 3) функционально соединена с промежуточной шестеренкой 15 (фиг. 3), которая закреплена в средней части первой общей оси стержня 16 с двумя фиксирующими подшипниками 17 и 18, которые закреплены между двумя нижними неподвижными в продольном направлении частями 1 и 2 медицинского стола в средней его части, на концах которой зафиксированы исполнительные шестеренки 19 и 20 возвратно-поступательного смещения корпуса робототехнической системы 12 с выдвижной крышкой 13 с электромагнитными фиксаторами 21 (фиг. 5) с корпусами медицинских инструментов 22 и с выдвижными элементами 14, при этом исполнительные шестеренки 19 и 20 первой общей оси стержня 16 функционально соединены с зубчатой линейной шестеренкой 23 (фиг. 3) Г-образной пластины 24 с одной стороны неподвижного корпуса 1 и 2 медицинского стола и с другой его стороны, на которых закреплены два последовательно расположенных опорных подшипника 25 и 26 для возвратно-поступательного продольного смещения по верхней поверхности нижней части 27 и 28 неподвижной в продольном направлении медицинского стола, а также на Г-образных пластинах 24 зафиксированы изогнутые две пары опорных стержней 29 и 30 для удержания тороидальной робототехнической системы 12, при этом компланарно первой общей оси стержня 16 (фиг. 1) на некотором расстоянии от нее по обе его стороны расположены два дополнительных стержня 31 и 32 с двумя первыми и вторыми шестеренками 8 и 9, которые позиционно расположены и функционально связаны с первой и второй линейными шестеренками 6 и 7 верхней части медицинского стола для возвратно-поступательного смещения и посредством двух пар подшипников 33 и 34 также закреплены между двумя нижними неподвижными в продольном направлении частями 1 и 2 (фиг. 2) медицинского стола, при этом в средней части двух дополнительных стержней 31 и 32 зафиксированы конические шестеренки 33 и 34, которые функционально связаны с коническими шестеренками первого привода с редуктором 10 и дополнительного привода с редуктором 35 соответственно для возвратно-поступательного смещения верхней части 3 медицинского стола.
На фиг. 4 изображена функциональная структура корректировочного возвратно-поступательного продольного перемещения как тороидальной робототехнической системы, так и подвижной части хирургического стола для выполнения конкретной медицинской процедуры, включающая вертикальный корпус 36 медицинского хирургического стола, нижняя часть которого зафиксирована на напольной пластине 37 с ребрами жесткости, а на верхней части расположена и закреплена средняя часть неподвижной части 1, 2 хирургического стола. При этом для формирования жесткости конструкции хирургического стола введена продольная промежуточная пластина 38, на краях которой сверху и снизу расположены опорные патрубки 38, 39 и 40, 41, которые посредством стержней 42 и 43 зафиксированы на напольной пластине 37 с ребрами жесткости. На фиг. 5 изображен тороидальный корпус робототехнической системы 12 с выдвижной крышкой 13 вместе с выдвижными элементами 14, которые закреплены на внутренней пластине 44 с возможностью осевого разворота посредством привода с редуктором 45. При этом электромагнитные фиксаторы 21 (фиг. 5) с корпусами медицинских инструментов 22 с внешней стороны цилиндрического корпуса 46, который выполнен с возможностью осевого разворота внутри выдвижной крышки 13.
Логико-динамический процесс функционального корректирующего возвратно-поступательного продольного перемещения как тороидальной робототехнической системы, так и подвижной части хирургического стола для выполнения конкретной медицинской процедуры заключается в следующем.
Поскольку медицинские процедуры выполняют в различных зонах пациента, поэтому как корпус 12 робототехнической системы, так и верхняя подвижная часть 3 медицинского стола должны быть выполнены с возможностью возвратно-поступательного продольного смещения, и его выполняют во взаимно противоположных направлениях. При этом смещение верхней подвижная часть 3 медицинского стола реализуют посредством привода с редуктором 10 и 35 (фиг. 1), в которых шестеренки функционально соединены с конической шестеренкой 33 и 34 двух дополнительных стержней 31 и 32, которые расположены со смещением друг относительно друга, чтобы, в конечном счете, подвижную верхнюю часть 3 медицинского стола с пациентом переместить, например, с мобильного медицинского стола на медицинский стол с томографом для диагностической процедуры, а затем на медицинский стол с тороидальной робототехнической системы для выполнения конкретной хирургической процедуры. А возвратно-поступательное смещение робототехнической системы, которая включает корпус 12 тороидальной робототехнической системы (фиг. 5) с выдвижной крышкой 13 с устройством разворота 44, 45 и выдвижными элементами 14, реализуют посредством привода с редуктором 11 (фиг. 3).
Использование предложенного технического решения позволяет усовершенствовать известную функциональную структуру как тороидальной робототехнической системы, так и подвижной части хирургического стола для выполнения конкретной медицинской процедуры вдоль хирургического стола для выполнения конкретной медицинской процедуры, а также позволяет расширить функциональные возможности верхней части медицинского стола.
Функциональная структура корректировочного возвратно-поступательного продольного перемещения как тороидальной робототехнической системы, так и подвижной части хирургического стола для выполнения конкретной медицинской процедуры, которая выполнена из зафиксированных между собой двух нижних частей, неподвижных в продольном направлении медицинского стола, и верхней части медицинского стола с возможностью возвратно-поступательного смещения вдоль неподвижной части медицинского стола, в котором в нижней продольной его части симметрично на некотором расстоянии друг от друга с равным шагом закреплены опорные подшипники для продольного его смещения, которые расположены на верхней поверхности неподвижной нижней части медицинского стола, а между рядами опорных подшипников зафиксированы или выполнены две линейные шестеренки, которые функционально соединены с первой и второй шестеренками соответственно, и включает первый привод с редуктором возвратно-поступательного смещения верхней части медицинского стола, а также включает второй привод с редуктором продольного возвратно-поступательного смещения корпуса робототехнической системы с выдвижной крышкой вместе с выдвижными элементами вдоль хирургического стола для проведения медицинских процедур, коническая шестеренка второго привода с редуктором функционально соединена с промежуточной шестеренкой, которая закреплена в средней части первой общей оси стержня с двумя фиксирующими подшипниками, которые закреплены между двумя нижними неподвижными в продольном направлении частями медицинского стола в средней его части, на концах которой зафиксированы исполнительные шестеренки возвратно-поступательного смещения корпуса робототехнической системы с выдвижной крышкой с электромагнитными фиксаторами с корпусами медицинских инструментов и с выдвижными элементами, при этом исполнительные шестеренки первой общей оси стержня функционально соединены с зубчатой линейной шестеренкой Г-образной пластины с одной стороны неподвижного корпуса медицинского стола и с другой его стороны, на которых закреплены два последовательно расположенных опорных подшипника для возвратно-поступательного продольного смещения по верхней поверхности нижней части, неподвижной в продольном направлении медицинского стола, а также на Г-образных пластинах зафиксированы изогнутые две пары опорных стержней для удержания тороидальной робототехнической системы, отличающаяся тем, что компланарно первой общей оси стержня на некотором расстоянии от нее по обе его стороны расположены два дополнительных стержня с двумя первыми и вторыми шестеренками, которые позиционно расположены и функционально связаны с первой и второй линейными шестеренками верхней части медицинского стола для возвратно-поступательного смещения и посредством двух пар подшипников также закреплены между двумя нижними неподвижными в продольном направлении частями медицинского стола, при этом в средней части двух дополнительных стержней зафиксированы конические шестеренки, которые функционально связаны с коническими шестеренками первого привода с редуктором и дополнительного привода с редуктором соответственно для возвратно-поступательного смещения верхней части медицинского стола.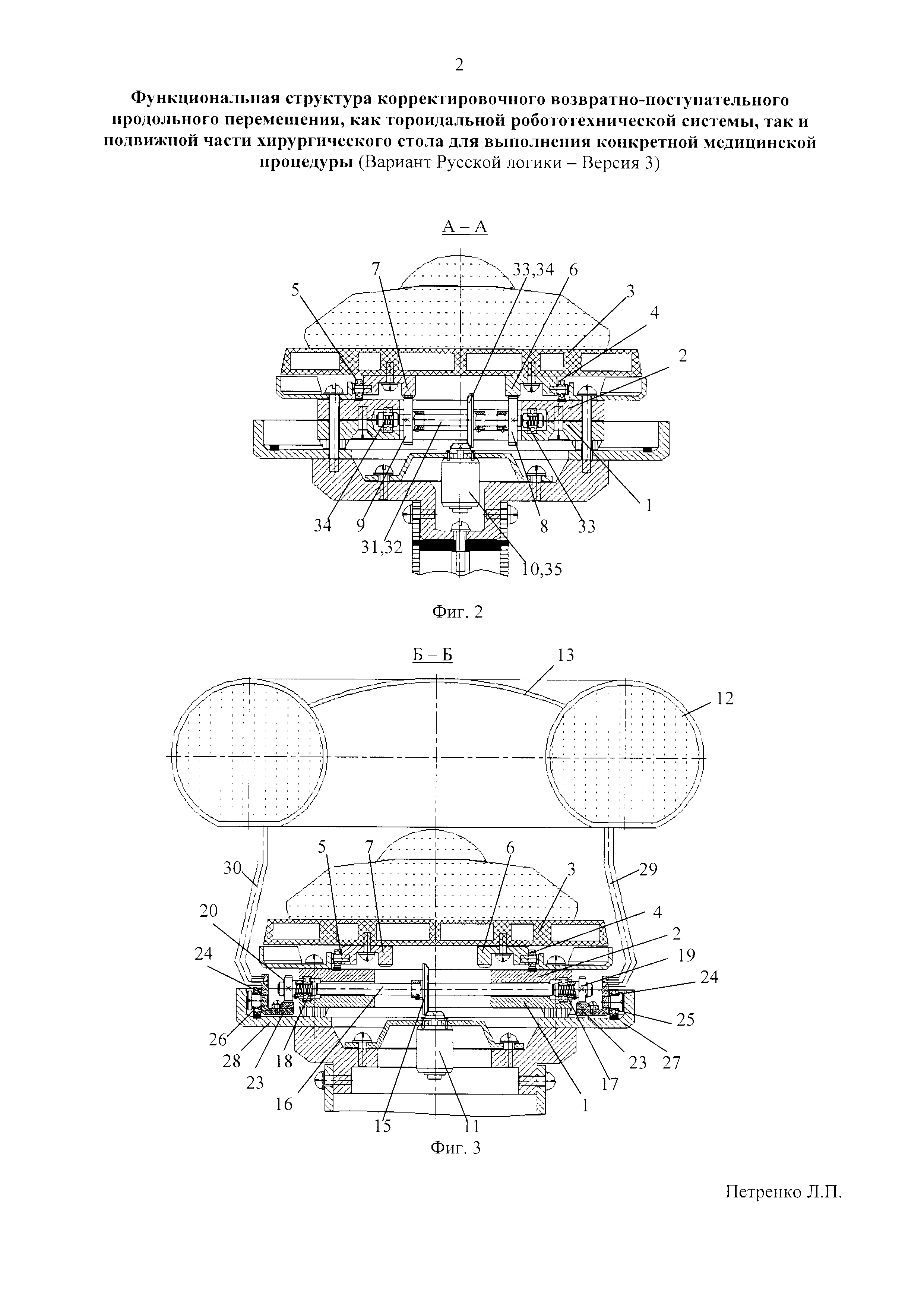
Функциональная структура сумматора f(σ) условно "g" разряда, реализующая процедуру "дешифрирования" аргументов слагаемых [s ]f(2) и [s ]f(2) позиционного формата "дополнительный код ru" посредством арифметических аксиом троичной системы счисления f(+1,0,-1) и двойного логического дифференцирования d/dn → f(←↓) активных аргументов "уровня 2" и удаления активных логических нулей "+1""-1"→"0" в "уровне 1" (варианты русской логики)
Способ формирования подъемной силы для подъема и перемещения груза в воздушной среде (вариант русской логики-версия 5)
Способ минимизации очагов возгорания на торфяниках (вариант русской логики)
Способ формирования логико-динамического процесса преобразования условно минимизированных структур аргументов аналоговых сигналов слагаемых [n]f(+/-) и [m]f(+/-) в функциональной структуре сумматора f(σ) без сквозного переноса f(←←) и технологическим циклом ∆t → 5∙f(&)-и пять условных логических функций f(&)-и, реализованный с применением процедуры одновременного преобразования аргументов слагаемых посредством арифметических аксиом троичной системы счисления f(+1,0,-1) и функциональные структуры для его реализации (вариант русской логики)
Способ тушения лесных пожаров с использованием авиационной техники (вариант русской логики)
Способ формирования надводного транспорта для перевозки грузов (вариант русской логики - версия 4)
Способ повышения маневренности подводной лодки (вариант русской логики - версия 1)
Способ формирования надводного транспорта для перевозки грузов (вариант русской логики - версия 2)
Способ повышения маневренности подводной лодки (вариант русской логики - версия 4)
Способ формирования надводного транспорта для перевозки грузов (вариант русской логики - версия 7)
Функциональная структура сумматора f(σ) условно "g" разряда, реализующая процедуру "дешифрирования" аргументов слагаемых [s ]f(2) и [s ]f(2) позиционного формата "дополнительный код ru" посредством арифметических аксиом троичной системы счисления f(+1,0,-1) и двойного логического дифференцирования d/dn → f(←↓) активных аргументов "уровня 2" и удаления активных логических нулей "+1""-1"→"0" в "уровне 1" (варианты русской логики)
Способ формирования подъемной силы для подъема и перемещения груза в воздушной среде (вариант русской логики-версия 5)
Способ минимизации очагов возгорания на торфяниках (вариант русской логики)
Способ формирования логико-динамического процесса преобразования условно минимизированных структур аргументов аналоговых сигналов слагаемых [n]f(+/-) и [m]f(+/-) в функциональной структуре сумматора f(σ) без сквозного переноса f(←←) и технологическим циклом ∆t → 5∙f(&)-и пять условных логических функций f(&)-и, реализованный с применением процедуры одновременного преобразования аргументов слагаемых посредством арифметических аксиом троичной системы счисления f(+1,0,-1) и функциональные структуры для его реализации (вариант русской логики)
Способ тушения лесных пожаров с использованием авиационной техники (вариант русской логики)
Способ формирования надводного транспорта для перевозки грузов (вариант русской логики - версия 4)
Способ повышения маневренности подводной лодки (вариант русской логики - версия 1)
Способ формирования надводного транспорта для перевозки грузов (вариант русской логики - версия 2)
Способ повышения маневренности подводной лодки (вариант русской логики - версия 4)
Способ формирования надводного транспорта для перевозки грузов (вариант русской логики - версия 7)

