Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ВЗАИМНОГО ПОЛОЖЕНИЯ ВЕДУЩЕГО И ВЕДОМОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области измерений, в частности к области способов и систем определения координат объектов за счет использования вторичного излучения акустических волн, и может быть использовано при создании систем управления мобильными наземными робототехническими комплексами.
Одним из современных сценариев применения мобильных наземных робототехнических комплексов в форме беспилотных транспортных средств является сценарий «следуй за мной». Сущность подобного сценария заключается в том, что беспилотное наземное транспортное средство оснащается оборудованием, позволяющим определять относительное взаимное положение ведомого беспилотного транспортного средства и ведущего. Ведущим может выступать как другое транспортное средство (автономное, телеуправляемое или управляемое водителем), так и человек. Ведущий оснащается техническими средствами, позволяющими идентифицировать его на фоне окружающей обстановки: визуальными метками, средствами радиоприема/радиопередачи, инфракрасными, ультразвуковыми метками и другими подобными средствами. Ведомое транспортное средство оснащается техническими средствами, способными распознать метку на фоне окружающей обстановки и определить ее положение относительно ведомого транспортного средства. Результаты определения относительного взаимного положения в дальнейшем используются для управления параметрами движения, например скоростью и углом поворота, ведомого транспортного средства. Подобным образом организуется дистанционное управление автономным транспортным средством при необходимости движения по динамически формируемой траектории. Ключевым вопросом реализации сценария «следуй за мной» является вопрос определения относительного взаимного положения ведущего и ведомого транспортного средства.
Известен способ, реализованный в устройстве [1], в соответствии с которым взаимное положение ведущего и ведомого транспортного средства определяется по результатам измерения интервалов времени, прошедших с момента начала цикла до момента получения ультразвукового сигнала каждым из двух, установленных на ведомом транспортном средстве приемников ультразвукового сигнала. Начало цикла определяется устройством, размещенным на ведущем, при этом указанным устройством формируется импульс, передаваемый по радиоканалу и принимаемый аппаратурой, размещенной на ведомом транспортном средстве. Одновременно с формированием импульса, обозначающего начало цикла, аппаратурой, размещенной на ведущем, формируется ультразвуковой импульс, излучаемый в направлении ведомого транспортного средства. Прием излученного ультразвукового импульса производится двумя пространственно разнесенными приемниками, размещенными на ведомом транспортном средстве. Интервалы времени, прошедшие с момента приема стартового импульса, переданного через радиоканал, и приема ультразвукового импульса каждым из двух приемников, размещенных на ведомом транспортном средстве, измеряются соответствующими устройствами, размещенными на ведомом транспортном средстве. На основе результатов измерений двух интервалов времени производится определение взаимного относительного положения ведущего и ведомого транспортного средства в полярной системе координат. При этом плоскость, в которой расположена указанная система координат, совпадает с плоскостью, проходящей через излучатель и приемники ультразвукового излучения.
Данный способ обладает низкими функциональными возможностями, поскольку использование всего лишь двух приемников не позволяет определять точное взаимное положение ведущего и ведомого транспортного средства в трехмерной, например декартовой, системе координат.
Известен также способ, наиболее близкий к заявляемому [2], в соответствии с которым взаимное положение ведущего и ведомого транспортного средства определяется по результатам измерения длительности распространения ультразвукового сигнала, посланного излучателем, установленным на ведущем, и разности времен получения ультразвукового сигнала каждым из трех или более пространственно разнесенных приемников ультразвукового сигнала, установленных на ведомом транспортном средстве. Способ состоит из нескольких этапов. На первом этапе при помощи устройства, установленного на ведомом транспортном средстве, формируется импульс, обозначающий начало очередного цикла измерений. Сформированный импульс по радиоканалу передается на приемник, установленный на ведущем. При получении импульса по радиоканалу аппаратурой, размещенной на ведущем, формируется ответный импульс, передаваемый при помощи ультразвукового излучателя. Ответный импульс принимается не менее чем тремя ультразвуковыми приемниками, размещенными на ведомом транспортном средстве. Интервалы времени, прошедшие с момента посылки импульса по радиоканалу до момента получения ответного импульса, измеряются для каждого ультразвукового приемника, установленного на ведомом транспортном средстве. По результатам измерений определяются также разности измеренных интервалов времени для каждой пары ультразвуковых приемников. На основании результатов измерений интервалов времени и разностей измеренных интервалов времени производится определение взаимного положения ведущего и ведомого транспортного средства.
Реализация данного способа требует расположения ведущего и ведомого транспортного средства таким образом, чтобы все приемники ультразвукового излучения находились в прямой видимости излучателя ультразвука, что существенно ограничивает множество возможных взаимных положений ведущего и ведомого транспортного средства. Также, вследствие указанного требования, ограничиваются возможности применения способа в ситуациях, когда некоторые приемники ультразвука заслоняются препятствиями, например, высокой травой или ветками кустарника.
Целью изобретения является расширение функциональных возможностей средств определения относительного взаимного положения ведущего и ведомого транспортного средства, дающее возможность определять взаимное положение в ситуациях, когда не все приемники контрольных ультразвуковых импульсов находятся в прямой видимости источника импульсов.
Способ основан на использовании значимого подмножества результатов измерений длительности распространения контрольного ультразвукового импульса от источника, размещенного на ведущем, до трех или большего количества приемников, размещенных на ведомом транспортном средстве. Значимое подмножество формируется в течение заранее заданного интервала времени - окна измерения, формируемого в каждом цикле определения относительного взаимного положения. В указанное значимое подмножество результатов включаются результаты измерений для датчиков, получивших контрольный ультразвуковой импульс, сформированный и излученный техническими средствами, размещенными на ведущем, до завершения окна измерения. Начало очередного цикла определения относительного взаимного положения обозначается специальным сигналом, например прямоугольным импульсом. Указанный сигнал передается по радиоканалу на технические средства, размещенные на ведущем и вызывает формирование и излучение контрольного ультразвукового импульса.
Одновременно с передачей по радиоканалу сигнала, обозначающего начало очередного цикла, инициируются последовательно: остановка тех измерителей временных интервалов, которые не были остановлены сигналами приемников ультразвукового импульса; считывание результатов измерений, полученных в предыдущем цикле; сброс измерителей в начальное состояние; запуск измерителей временных интервалов.
На ведомом транспортном средстве размещается не менее трех приемников ультразвукового сигнала и, соответственно, не менее трех измерителей временных интервалов. Измерители временных интервалов, связанные с каждым из приемников ультразвукового сигнала, завершают измерение в момент получения приемником контрольного ультразвукового импульса, сформированного и излученного техническими средствами, размещенными на ведущем. Для индикации факта приема ультразвукового импульса может, например, использоваться специальный сигнал, формируемый техническими средствами, связанными с каждым приемником ультразвука. Измерения, завершенные в момент приема контрольного ультразвукового импульса, являются значимыми и впоследствии используются в качестве исходных данных для определения относительного взаимного положения ведущего и ведомого транспортного средства. Измерители временных интервалов, связанные с теми ультразвуковыми приемниками, которые не получили контрольный ультразвуковой импульс до завершения окна измерения, останавливаются в начальной фазе следующего цикла определения относительного взаимного положения. Показания остановленных в момент завершения окна измерения измерителей временных интервалов не относятся к значимому подмножеству и не используются при определении относительного взаимного положения ведомого и ведущего транспортного средства.
Определение относительного взаимного положения ведущего и ведомого транспортного средства производится одновременно с выполнением следующего цикла измерений по результатам, вошедшим в значимое подмножество, на основе известных соотношений, например, как решение системы уравнений

где
 - расстояние от источника ультразвука до i-го приемника;
- расстояние от источника ультразвука до i-го приемника;
i - порядковый номер приемника ультразвука в значимом подмножестве;
n - количество результатов в значимом подмножестве измерений;
c - скорость распространения ультразвука в воздухе;
Ti - результат измерения временного интервала для i-го приемника;
x,y,z - искомые координаты источника ультразвука, размещенного на ведущем в декартовой системе координат, связанной с ведомым транспортным средством;
xi,yi,zi - координаты i-го приемника, вошедшего в значимое подмножество, в декартовой системе координат, связанной с ведомым транспортным средством;
одним из известных методов теории оптимизации, если значимое подмножество результатов измерений состоит из трех или большего числа элементов, или известных тригонометрических соотношений, например,
где
L - искомое полярное расстояние до источника ультразвука, размещенного на ведущем, в полярной системе координат, связанной с ведомым транспортным средством;
 - расстояние от источника ультразвука до приемника с меньшим значением координаты у;
- расстояние от источника ультразвука до приемника с меньшим значением координаты у;
Tl - результат измерения временного интервала для приемника с меньшим значением координаты у;
 - расстояние от источника ультразвука до приемника с большим значением координаты у;
- расстояние от источника ультразвука до приемника с большим значением координаты у;
Тr - результат измерения временного интервала для приемника с большим значением координаты у;
D - половина расстояния между приемниками ультразвука, вошедшими в значимое подмножество;
θ - искомый полярный угол источника ультразвука, размещенного на ведущем, в полярной системе координат, связанной с ведомым транспортным средством; если значимое подмножество результатов измерений состоит из двух элементов.
Техническим результатом, обеспечиваемым способом, является расширение функциональных возможностей средств определения относительного взаимного положения ведущего и ведомого транспортного средства за счет проведения измерений и расчетов в ситуациях, когда не все приемники ультразвукового сигнала, установленные на ведомом транспортном средстве, получают ультразвуковой сигнал, сформированный излучателем, например потому, что они не находятся в прямой видимости излучателя, заслонены от излучателя препятствиями, находятся слишком далеко от излучателя или по другим причинам.
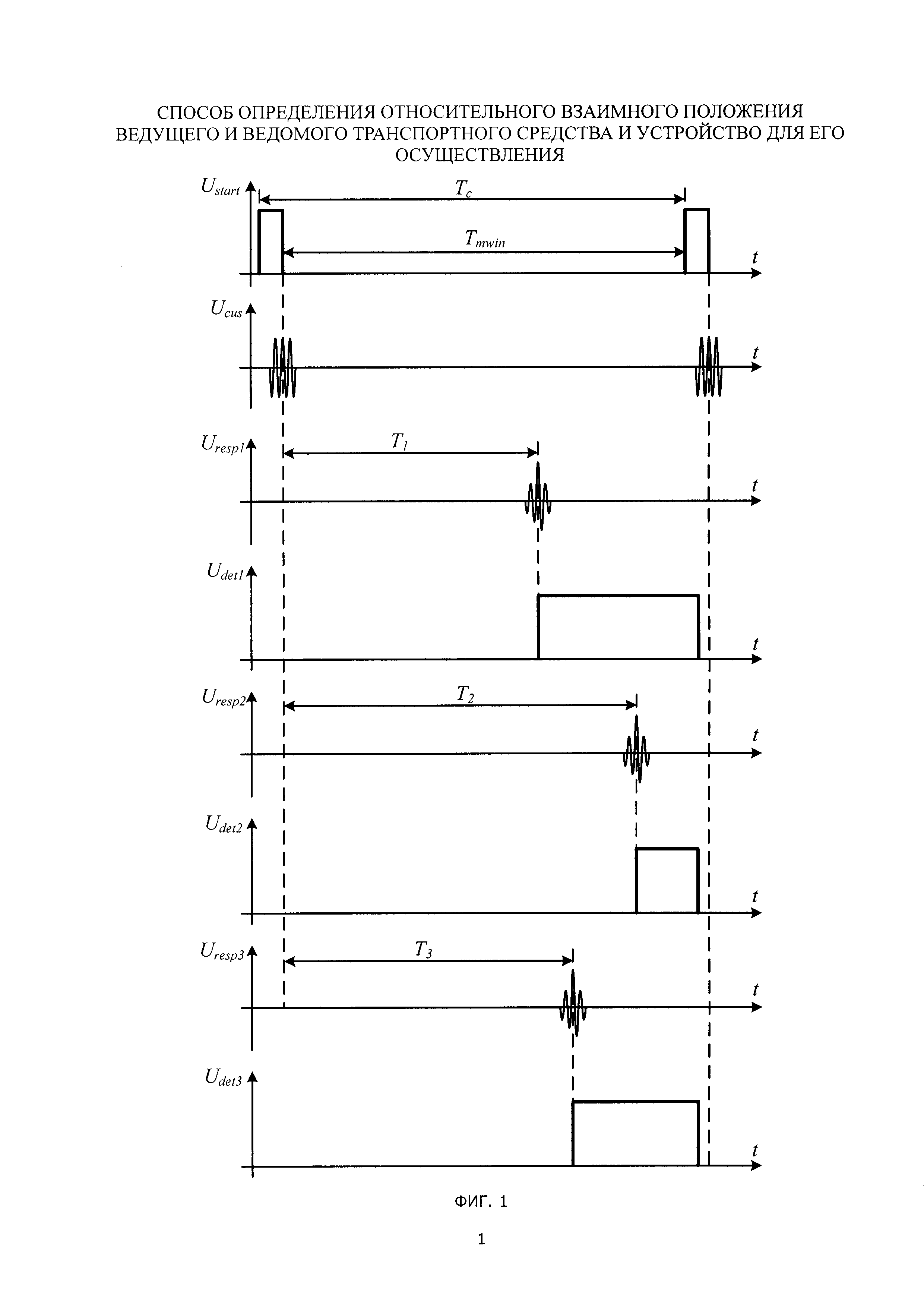
Сущность способа иллюстрируется диаграммами, приведенными на фиг. 1 и фиг. 2. Диаграммы, изображенные на фиг. 1, иллюстрируют ситуацию, в которой контрольный ультразвуковой импульс Ucus, сформированный техническими средствами, размещенными на ведущем, принимается тремя приемниками ультразвукового излучения Urespl, Uresp2 и Uresp3, размещенными на ведомом транспортном средстве. Контрольный ультразвуковой импульс формируется в момент получения по радиоканалу импульса Ustart, обозначающего начало очередного цикла. Передний фронт импульса Ustart инициирует процессы остановки измерителей временных интервалов, считывания результатов предыдущего цикла измерений, сброса измерителей и индикаторов приема Udeti в исходное состояние, а также запуска измерителей временных интервалов.
Длительность окна измерения Tmwin зависит от длительности цикла измерений Тс и длительности запускающего импульса и определяется как (Тс-Tstart), где Tstart - длительность запускающего импульса.
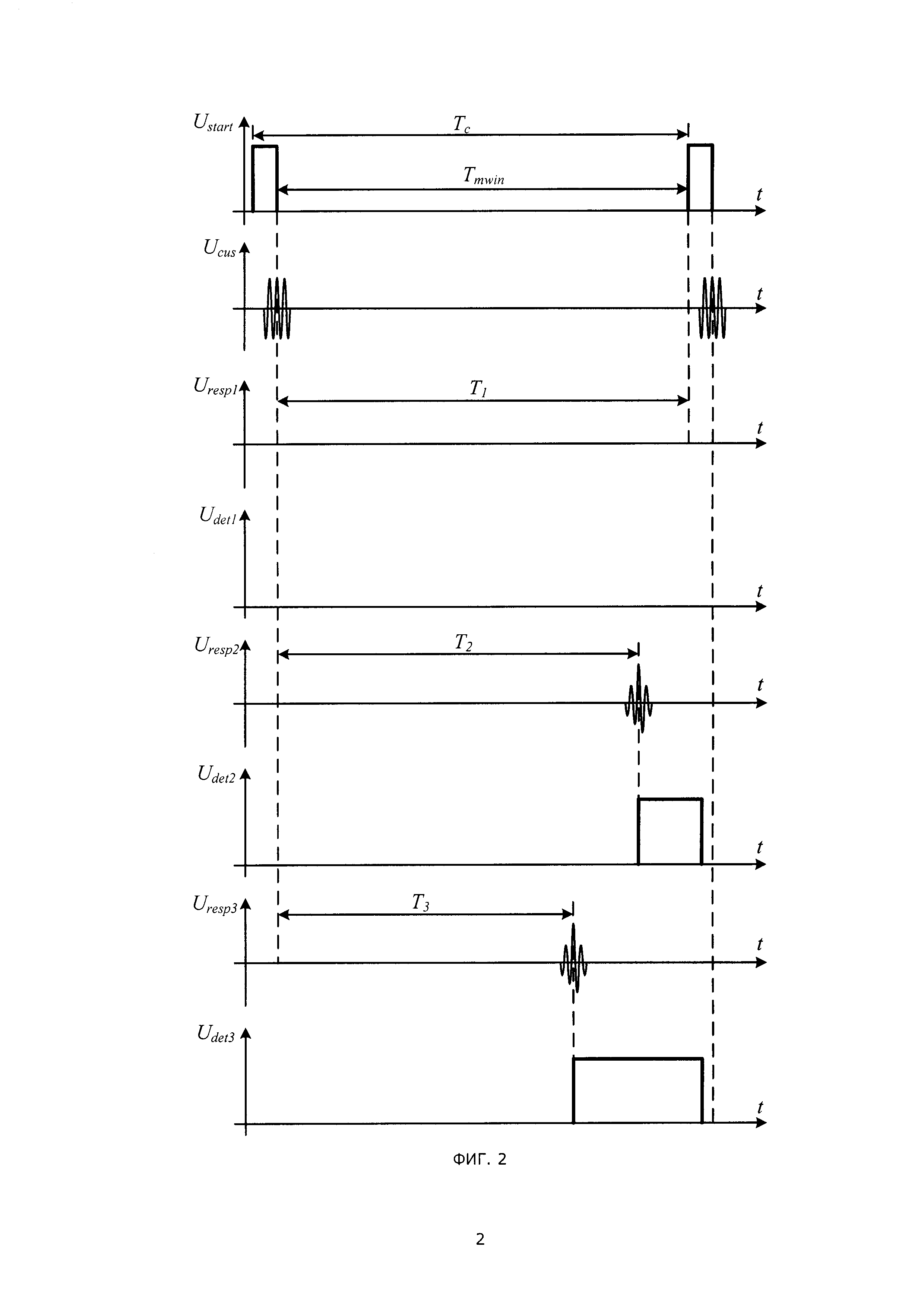
В ситуации, описываемой диаграммами фиг. 1, каждый из приемников получает контрольный импульс до завершения окна измерения. Таким образом, значимое подмножество состоит из результатов измерений длительностей временных интервалов T1, Т2 и Т3, что индицируется сигналами индикаторов приема Udet1, Udet2 и Udet3. Определение относительного взаимного положения ведущего и ведомого транспортного средства осуществляется средствами обработки данных, размещенными на ведомом транспортном средстве, на основе известных соотношений. Например, координаты ведущего в декартовой системе координат, связанной с ведомым транспортным средством, являются решением системы уравнений (1) для случая трех расстояний: r1=сТ1, r2=сТ2 и r3=сТ3. Вычисления производятся параллельно с выполнением следующего цикла измерений. Диаграммы фиг. 2 описывают ситуацию, в которой формирование контрольного ультразвукового импульса, формирование окна измерений и управление средствами измерений временных интервалов осуществляется так же, как и в предыдущем случае. Отличие заключается в том, что один из приемников ультразвукового излучения Urespl не получает контрольный импульс в течение заданного интервала времени Tmwin. В итоге, значимое подмножество результатов измерений состоит из величин Т2 и Т3. Относительное взаимное положение ведущего и ведомого транспортного средства определяется на основе соотношений (2), в которых, например, rι=сТ2 и rr=сТ3, параллельно с выполнением следующего цикла измерений.
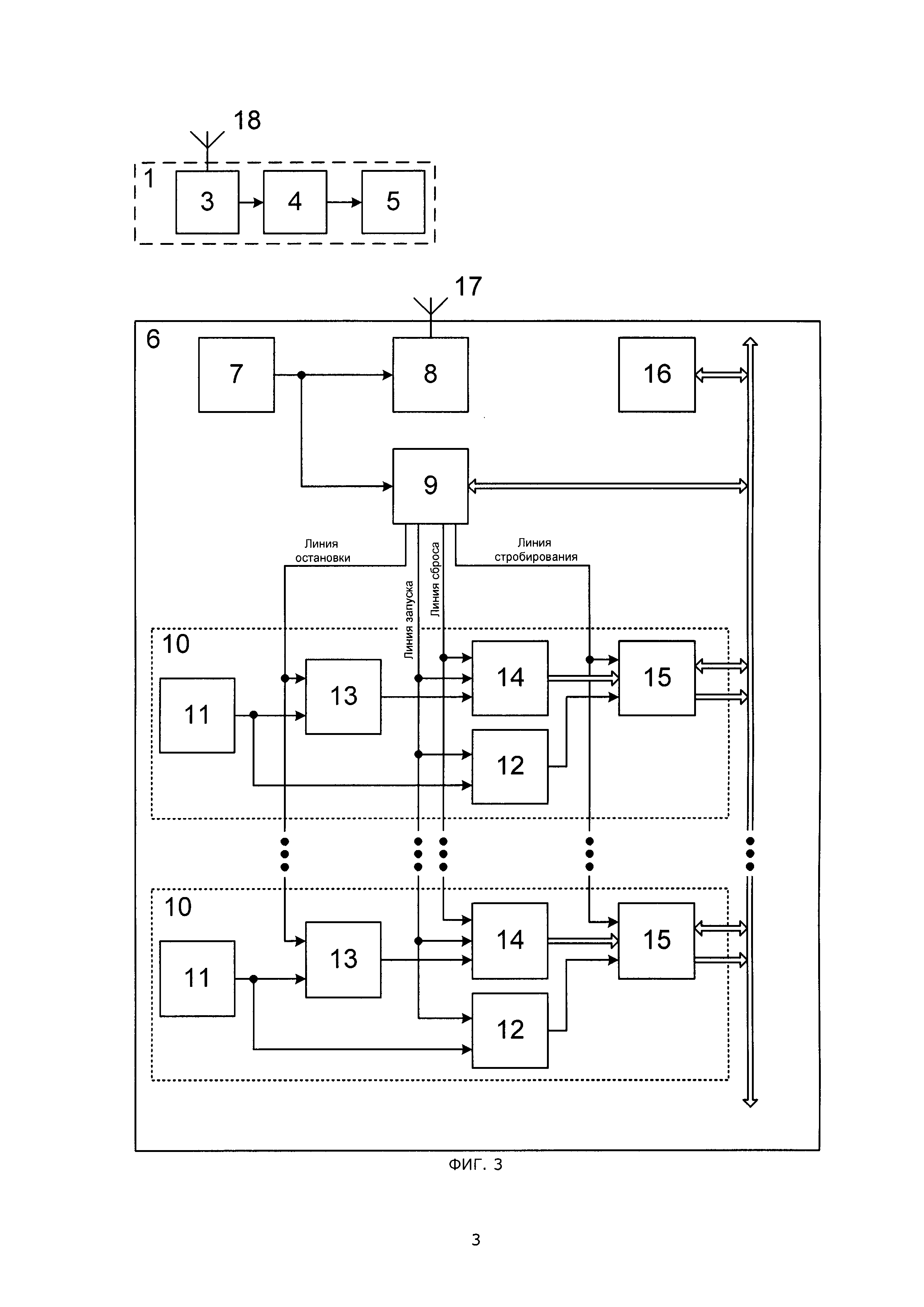
Устройство для определения относительного взаимного положения ведущего и ведомого транспортного средства состоит из эхо-ответчика, размещенного на ведущем, и сенсорного-вычислительного комплекса, размещенного на ведомом транспортном средстве. Структурная схема устройства приведена на фиг. 3.
Эхо-ответчик 1 включает в себя приемник радиосигналов 3, своим выходом соединенный с формирователем ультразвуковых импульсов 4, выход которого соединен со входом возбуждения ультразвукового излучателя 5.
Сенсорно-вычислительный комплекс 6 состоит из генератора запускающих импульсов 7, выход которого соединен со входом передатчика радиосигналов 8, а также со входом запроса прерывания микропроцессора 9. Выходы микропроцессора подключены к линиям сброса, запуска и остановки измерителей временных интервалов, линии стробирования результатов измерений и системной магистрали. Сенсорно-вычислительный комплекс также содержит три или более измерительных канала 10, по числу установленных на ведомом транспортном средстве приемников ультразвуковых импульсов 11. Каждый канал, помимо приемника ультразвуковых импульсов 11, выход которого соединен со входом сброса триггера измерений 12 и первым входом элемента «ИЛИ» 13, содержит измеритель длительности временного интервала 14, информационные выходы которого соединены с одноименными входами регистра 15. Вход старшего разряда регистра 15 соединен с выходом триггера измерений 12, а вход строба записи - с линией стробирования результатов. Вход запуска измерителя длительности временного интервала 14 соединен с линией запуска, вход сброса - с линией сброса, а вход остановки соединен с выходом элемента «ИЛИ» 13, второй вход которого подключен к линии остановки. Выходы данных регистра 15 соединены с линиями данных системной магистрали, а управляющие входы соединены с линиями управления системной магистрали. Системная магистраль микропроцессора соединена также со входами-выходам и интерфейсного устройства 16, предназначенного для взаимодействия с внешними устройствами и системами. Передатчик радиосигналов 8 оснащен передающей антенной 17, а приемник радиосигналов 3 - приемной антенной 18.
Устройство работает следующим образом.
В начале очередного цикла определения относительного взаимного положения ведущего и ведомого транспортного средства генератором импульсов 7, входящим в состав сенсорно-вычислительного комплекса 6, формируется импульс запуска, поступающий на вход передатчика радиосигналов 8, а также на вход запроса прерывания микропроцессора 9. Передатчик радиосигналов модулирует и излучает поступивший импульс через передающую антенну 17. Излученный радиоимпульс при помощи приемной антенны 18 принимается приемником радиосигналов 3, входящим в состав эхо-ответчика 1, а затем передается на вход формирователя ультразвуковых импульсов 4, формирующего и подающего импульс ультразвука на вход ультразвукового излучателя 5. Ультразвуковой излучатель 5 посылает ультразвуковой импульс в сторону ведомого транспортного средства. Импульс запуска, сформированный генератором импульсов 7, входящим в состав сенсорно-вычислительного комплекса 6, и поступивший на вход запроса прерывания микропроцессора 9, вызывает запуск подпрограммы формирования управляющих импульсов и подпрограммы считывания и обработки результатов измерений.
Подпрограмма формирования управляющих импульсов формирует последовательно и подает на соответствующие выходы микропроцессора импульсы стробирования результатов, остановки измерений, сброса измерительного канала и запуска измерений. Импульс стробирования результатов подается на линию стробирования результатов измерений и поступает на стробирующие входы регистров 15 в каждом измерительном канале 10. Поступивший на вход стробирования импульс фиксирует в регистре результат измерения временного интервала в предыдущем цикле, а также признак приема ультразвукового импульса, поступающий в старший разряд данных регистра 15 с триггера измерений 12. Импульс остановки измерений подается микропроцессором 9 на линию остановки, которая подключена ко вторым входам элементов «ИЛИ» 13 в каждом из измерительных каналов 10. На выходе элемента «ИЛИ» 13 в результате формируется импульс, поступающий на вход остановки измерителя временного интервала 14 и останавливающий измерения, если они не остановлены ранее, импульсом, поступившим с выхода приемника ультразвуковых сигналов 11. Импульс сброса, формируемый микропроцессором 9, поступает на линию сброса и через нее подается на вход сброса измерителя временных интервалов 14 в каждом из измерительных каналов 10, а также на вход установки триггера измерений 12 в каждом из измерительных каналов 10, переводя выход триггера в состояние логической 1. Импульс запуска поступает на линию запуска и через нее - на входы запуска измерителей временных интервалов 14 в каждом измерительном канале 10. В момент подачи импульса запуска начинается очередной цикл измерений. Когда приемник ультразвуковых импульсов 11 принимает импульс, излученный ультразвуковым излучателем 5 эхо-ответчика 1, на его выходе формируется импульс, поступающий на первый вход элемента «ИЛИ» 13. В результате, на выходе элемента «ИЛИ» 13 также формируется импульс, поступающий на вход остановки измерений измерителя временных интервалов 14, а также на вход сброса триггера измерений 12. Поступивший на вход сброса триггера импульс переводит выход триггера измерения 12 в состояние логического 0, индицируя тем самым завершение измерения временного интервала до завершения окна измерения. Длительность окна измерения в рассматриваемой системе определяется длительностью паузы между импульсами запуска, формируемыми генератором импульсов 7.
Подпрограмма считывания и обработки результатов измерений, запускаемая после формирования стробирующего импульса микропроцессором 9, формирует сигналы системной магистрали, необходимые для считывания данных из регистров 15 каждого измерительного канала 10. Считываемые данные содержат результаты измерения длительности временного интервала в канале на предыдущем цикле и признак приема ультразвукового импульса в виде уровня логического сигнала в старшем разряде считываемых данных. Старший разряд считываемых данных, установленный в логический 0 означает завершение измерений в канале в результате приема ультразвукового импульса, а установленный в логическую 1 - завершение измерений по завершению окна измерения Tmwin. Закончив сбор данных со всех каналов, подпрограмма считывания и обработки результатов начинает определение относительного взаимного положения ведущего и ведомого транспортного средства, причем для определения относительного взаимного положения используются только те результаты измерений длительности временных интервалов, для которых старший разряд имеет уровень логического 0. Результаты обработки - координаты ведущего в системе координат, связанной с ведомым транспортным средством, передаются затем из микропроцессора через интерфейсное устройство 16 для использования системой управления мобильным роботом, индикации координат ведущего на устройстве отображения или для решения других задач внешними системами.
Источники информации
1. Пат. 5611406А США, МКИ А63В 55/60, G05D 1/12, G01S 15/10, B62D 1/28, G05D 1/02. Automatic guiding and tracking device / К. Matsuzaki, S. Yamagishi; Заявлено 11.07.1995; Опубл. 18.03.1997.
2. Пат. 8949012B2 США, МКИ G05D 1/02, G06F 17/10, G06G 7/78. Automated multi-vehicle position, orientation and identification system and method / C-A. Rabbath, A. Morris, D. Grenier; Заявлено 05.04.2012; Опубл. 03.02.2015.
Устройство измерения пространственно неоднородного постоянного или меняющегося во времени магнитного поля
Устройство измерения пространственно неоднородного постоянного или меняющегося во времени магнитного поля
Ультразвуковая система обнаружения препятствий движению беспилотного транспортного средства

