Результат интеллектуальной деятельности: Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии
Вид РИД
Изобретение
Изобретение относится к сельскому хозяйству, в частности к устройствам для дифференцированного внесения жидких средств химизации летательными аппаратами в системе точного земледелия.
Известен комплекс для авиационных химических работ, содержащий автоматический летательный аппарат в виде парашютного крыла с подвешенной гондолой, выполняющей одновременно роль жесткого крыла и резервуара для рабочей жидкости с прикрепленной рамой, на которой размещены силовая установка с двигателем и тянущим винтом, приемную сторону системы навигации в виде высотомера, системы датчиков и программно-управляющего устройства и передающую сторону в виде излучателей, устанавливаемых на краю поля, либо используются сигналы глобальной спутниковой навигационной системы (Патент RU 2342284, опубл. 10.08.2008).
Недостатком данного устройства является что, что средства защиты растений вносятся по усредненным дозам и без учета внутрипольной неоднородности фитосанитарного состояния посевов сельскохозяйственных культур, в этой связи пестициды вносят и на участках, не засоренных сорными растениями, не поврежденных вредителями и болезнями, где их внесение не требуется, что приводит к излишнему перерасходу средств защиты растений. Ограничения по взлетной массе и рабочей ширине опрыскивания растений данным устройством предопределяют недостаточную производительность выполнения авиационно-химических работ данным комплексом.
Известны способ авиационного нанесения жидких, порошкообразных и других веществ и комплекс из летательных аппаратов для его осуществления, включающий базовый вертолет с емкостью для вносимых веществ, пультом управления, беспилотный летательный аппарат (БПЛА) с двигателем, устройствами, распределяющими рабочие вещества, датчиками высоты полета и боковыми датчиками наличия лесополосы, связанный гибкой связью с вертолетом, на которой закреплены трубопровод для подачи жидких веществ из емкости вертолета к распределяющим устройствам, электрокабель для энергопитания двигателя беспилотного аппарата (Патент RU 2272754, опубл. 27.03.2006).
Недостатками данного устройства являются ограниченная рабочая ширина захвата распределения наносимых веществ одним беспилотным летательным аппаратом, что снижает производительность процесса внесения пестицидов, а также невозможность внесения дифференцированных доз и норм пестицидов на обрабатываемых участках лесонасаждений и сельскохозяйственного поля, что приводит к уменьшению их окупаемости вследствие внесения усредненных доз средств химизации без учета внутрипольной неоднородности фитосанитарного состояния посевов и почвенного плодородия, при этом система управления комплексом из летательных аппаратов в виде пульта управления на базовом вертолете и гибкой связи с БПЛА не является совершенной.
Из известных способов и устройств управления БПЛА (см. Иванова И.А., Никонов В.В., Царева А.А. Способы организации управления беспилотными летательными аппаратами // Актуальные проблемы гуманитарных и естественных наук. - 2014. - Выпуск №11-1) наиболее эффективной для группы объектов является система согласованного распределенного контроля, связи и управления группой из нескольких БПЛА (Боб Мак-Ильврайд. Распределенное управление беспилотными летательными аппаратами // Современные технологи автоматизации. - 2009. - №3).
Мировым трендом повышения эффективности агропроизводства является точное земледелие, одним из основных элементов которого является дифференцированное внесение средств защиты растений, минеральных удобрений и других агрохимикатов с использованием цифровых карт-заданий, разработанных в результате мониторинга фитосанитарного состояния посевов, диагностики роста, развития и питания растений (Шпаар Д., Захаренко А., Якушев В., и др. Точное сельское хозяйство (PRECISION AGRICULYURE). - Санкт-Петербург - Пушкин, 2009. - С. 14-16, 108. 188-203). Технология дифференцированного внесения средств защиты растений и удобрений предназначена в основном для наземных технологических операций и не предусматривает систему управления группой мобильных объектов. В то же время система согласованного распределенного управления группой летательных аппаратов не включает процессы дифференцированного внесения жидких средств химизации.
Выявленные недостатки известных способов и устройств не позволяют осуществлять дифференцированное внесение жидких средств химизации (ЖСХ) в системе точного земледелия, что снижает эффективность и качество внесения, характеризуется внесением излишнего количества ЖСХ выше заданных норм и, как следствие, загрязнением окружающей среды, при этом применение БПЛА для обработки средствами химизации сельскохозяйственных и лесных угодий отличается низкой производительностью вследствие небольшой рабочей ширины захвата.
Технической задачей изобретения является создание комплекса летательных аппаратов для дифференцированного внесения ЖСХ на каждом выделенном элементарном участке и по всей площади сельскохозяйственного поля в соответствии с электронной картой-заданием, отображающей дозы внесения минеральных удобрений в соответствии с агрохимической картограммой поля или нормы внесения пестицидов в соответствии с картой фитосанитарного состояния посевов, обеспечивающего повышение производительности и качества внесения жидких средств химизации летательными аппаратами.
Поставленная техническая задача достигается тем, что в комплексе летательных аппаратов для внесения жидких средств химизации в точном земледелии, содержащем базовый летательный аппарат вертолетного типа, снабженный пилотажно-навигационным оборудованием, приемником сигналов глобальной спутниковой навигационной системы, бортовым компьютером со встроенной системой распределенного контроля, связи и управления беспилотными летательными аппаратами и модулем программного обеспечения дифференцированной обработки сельскохозяйственного поля, блоком автоматического управления расходом, распределением и подачей жидких средств химизации, баком для жидких средств химизации, гибкими связями с закрепленными на них электрокабелями и трубопроводами, соединенную с базовым вертолетом 1 группу из n-го количества беспилотных летательных аппаратов вертолетного типа, каждый их которых снабжен приемником сигналов глобальной навигационной спутниковой системы, бортовым компьютером, системой автоматического управления полетом на заданных режимах, модулем программного обеспечения дифференцированного внесения жидких средств химизации, модулем диспергирования в виде штанги с форсунками, согласно изобретению группа беспилотных летательных аппаратов представляет конечное счетное множество, состоящее из нечетного количества - n беспилотных летательных аппаратов, где n≥3, центр масс каждого из которых совмещен с вершинами углов одного или нескольких равнобедренных треугольников, образующих в полете одно или несколько взаимосвязанных треугольных звеньев из беспилотных летательных аппаратов, находящихся в одной горизонтальной плоскости, параллельной обрабатываемому полю, отстоящей от обрабатываемой поверхности поля на расстоянии, равном рабочей высоте обработки сельскохозяйственных культур, а расстояние между соседними беспилотными летательными аппаратами равно длине штанги с форсунками каждого беспилотного летательного аппарата; при этом все штанги с форсунками выполнены одной длины, каждая штанга с форсунками соединена с соответствующими модулями дозирования, снабженными интерфейсной связью с бортовым компьютером каждого беспилотного летательного аппарата и соединенными гибкой трубопроводной связью с соответствующим распределительным клапаном блока автоматического управления расходом, распределением и подачей базового летательного аппарата, содержащего фронтальную штангу длиной, не превышающей диаметра несущего винта базового летательного аппарата с автоматическими лебедками, количество которых равно числу гибких связей с беспилотными летательными аппаратами, а каждый модуль программного обеспечения дифференцированного внесения жидких средств химизации каждого беспилотного летательного аппарата функционально связан с модулем программного обеспечения для дифференцированной обработки всего сельскохозяйственного поля, и одновременно оба модуля интегрированы в систему распределенного контроля, связи и управления беспилотными летательными аппаратами, а каждый модуль диспергирования жидких средств химизации на каждом беспилотном летальном аппарате связан с модулем дозирования.
Изобретение поясняется чертежами.
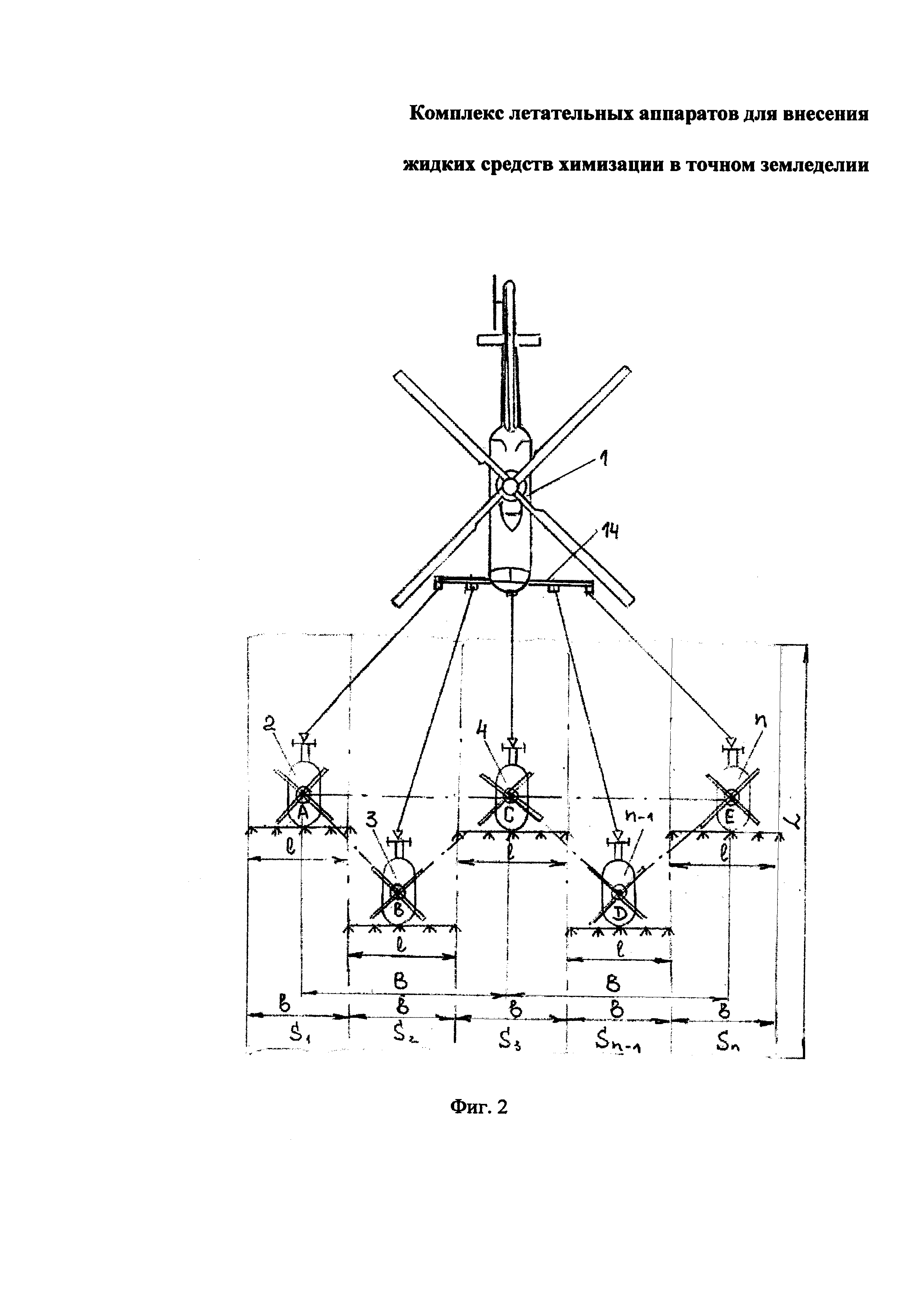
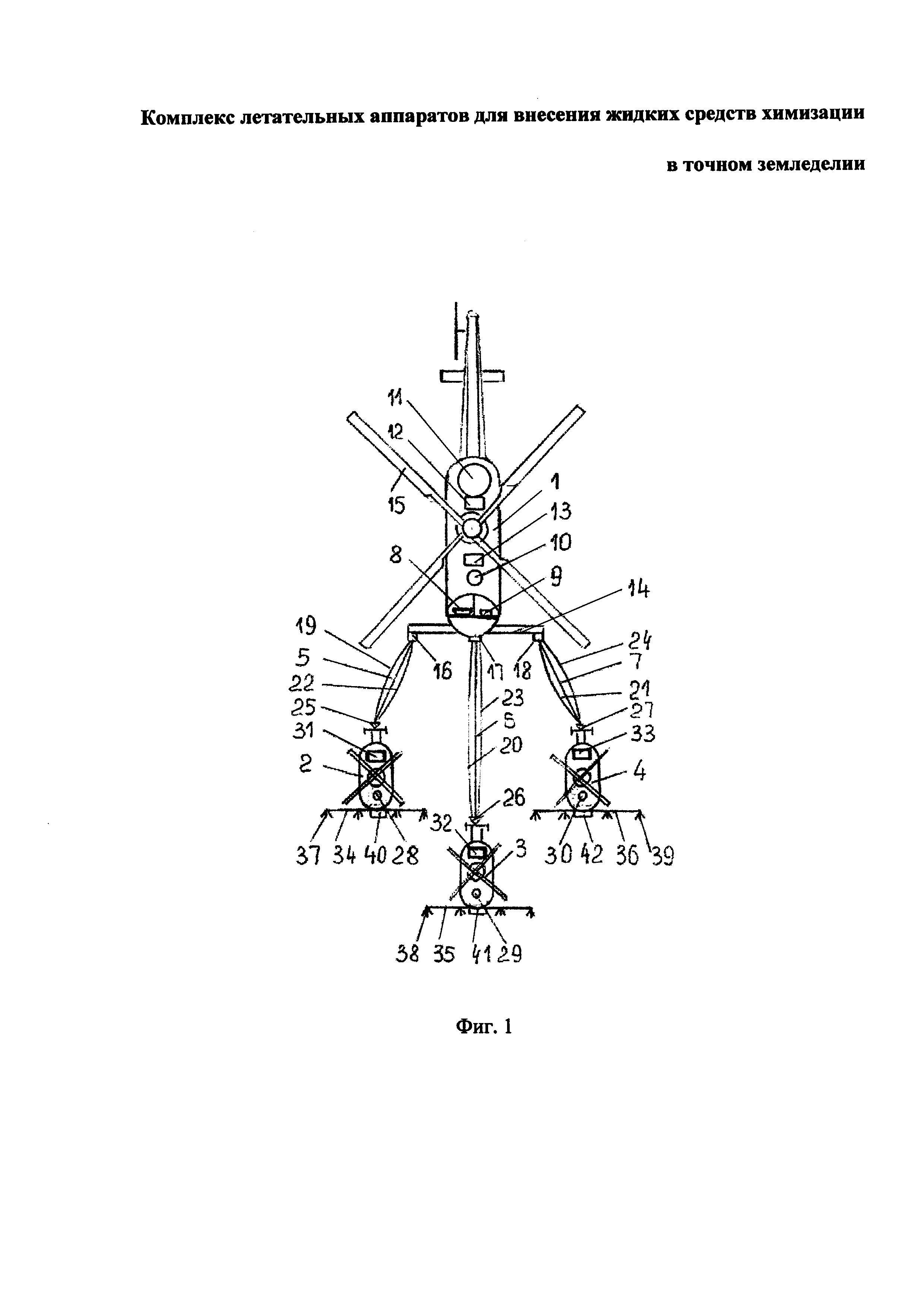
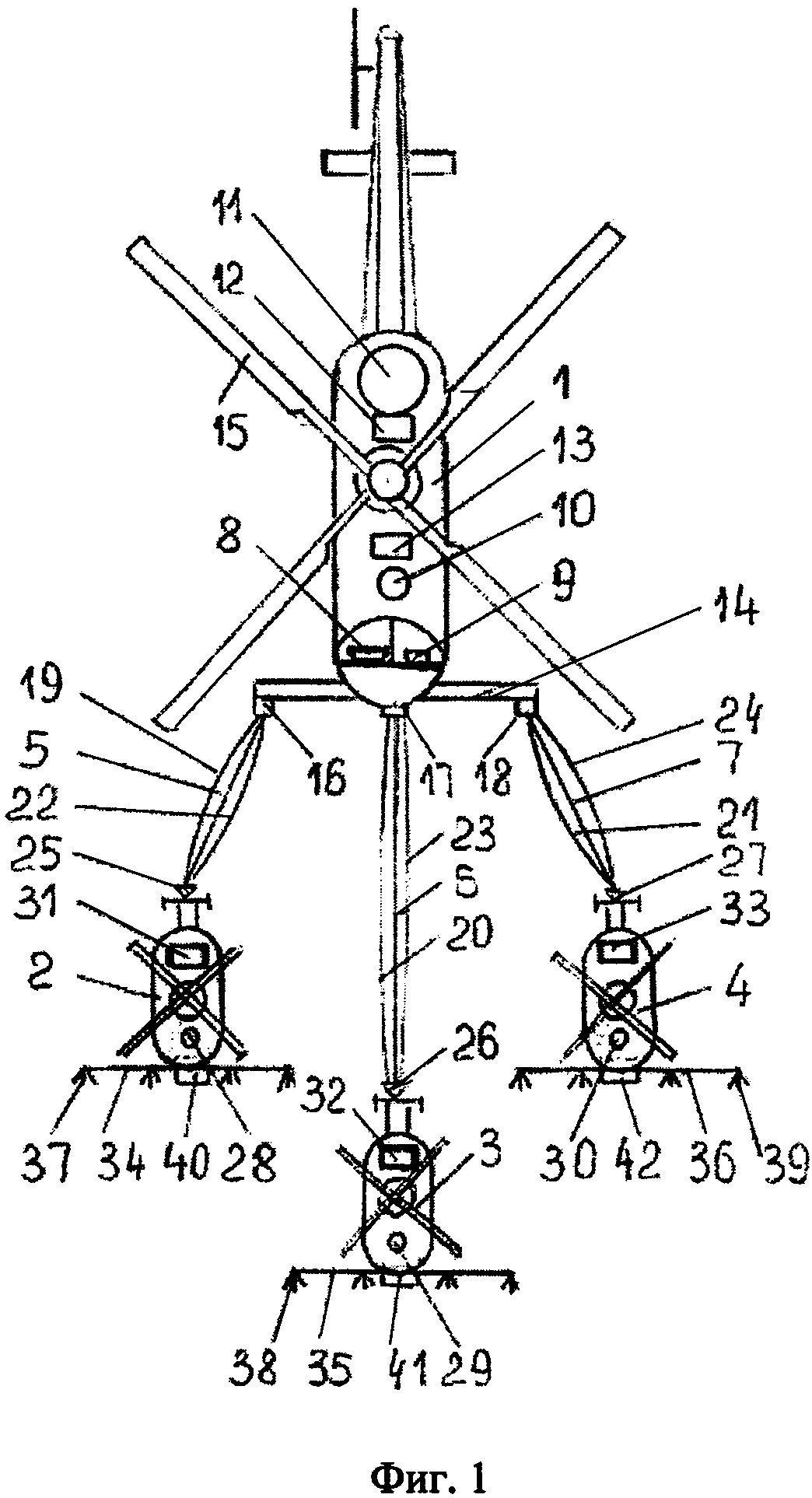
На фиг. 1 показан вид сверху комплекса летательных аппаратов с тремя БПЛА; на фиг. 2 - то же с пятью БПЛА; на фиг. 3 - принципиальная технологическая схема оборудования для обеспечения дифференцированного внесения жидких средств химизации комплексом летательных аппаратов.
Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии включает базовый летательный аппарат 1 вертолетного типа и группу из конечного счетного множества, состоящего из нечетного количества n, где n - целые числа и n≥3, беспилотных летательных аппаратов вертолетного типа (БПЛА) 2, 3, 4, соединенных гибкими связями 5, 6, 7 с базовым летательным аппаратом 1.
Базовый летательный аппарат 1 оснащен пилотажно-навигационным оборудованием 8, бортовым компьютером 9 со встроенной системой распределенного контроля, связи и управления беспилотными летательными аппаратами и модулем программного обеспечения для дифференцированной обработки всего сельскохозяйственного поля, приемником сигналов 10 глобальной спутниковой навигационной системы, баком 11 для жидких средств химизации, насосным агрегатом 12, блоком 13 автоматического управления расходом, распределением и подачей ЖСХ и фронтальной штангой 14 длиной, не превышающей диаметра несущего винта 15 базового летательного аппарата 1. На 14 штанге на равных расстояниях друг от друга смонтированы автоматические лебедки 16, 17, 18 для разматывания и наматывания гибких связей 5, 6, 7. Количество лебедок 16, 17, 18 равно числу гибких связей 5, 6, 7.
На гибких связях 5, 6, 7 закреплены гибкие трубопроводы 19, 20, 21 для подачи ЖСХ и электрокабели 22, 23, 24 для подачи электропитания к двигателям БПЛА 2, 3, 4.
Концы гибких связей 5, 6, 7 совместно с концами трубопроводов 19, 20, 21 и электрокабелей 22, 23, 24 снабжены быстродействующими устройствами стыковки-расстыковки 25, 26, 27 с БПЛА 2, 3, 4, что позволяет осуществлять аварийные его отсоединения БПЛА. Каждый из БПЛА 2, 3, 4 содержит приемник сигналов глобальной спутниковой навигационной системы ГЛОНАСС/GPS 28,29,30, систему автоматического управления полетом БПЛА на заданных режимах (не показано), бортовой компьютер 31, 32, 33 с модулем программного обеспечения дифференцированного внесения ЖСХ каждым БПЛА 2, 3, 4, модулем диспергирования в виде выполненных одной длины штанг 34, 35, 36 с форсунками 37, 38, 39, соединенными с модулями дозирования 40, 41, 42.
Блок 13 автоматического управления расходом, распределением и подачей ЖСХ к БПЛА 2, 3, 4 включает насосный агрегат 12, электрогидравлические нормально-закрытые запорные клапаны 43 и 44, переливные гидравлические клапаны 45 и 46, электрогидравлический редукционный клапан 47 с цифровым управлением, электромагнитный расходомер 48, распределительные электрогидравлические клапаны 49, 50 и 51, соединенные трубопроводами 19, 20, 21 с модулями дозирования 40, 41, 42 БПЛА 2, 3, 4. Гидравлическое оборудование блока 13 соединено с баком 11 и между собой гидролиниями 52, 53, 54, 55, 56 и гибкими трубопроводами 19, 20, 21 подачи ЖСХ к БПЛА 2, 3, 4. Модули дозирования 40, 41, 42 каждого БПЛА 2, 3, 4 снабжены быстродействующими электромагнитными запорными клапанами 57, 58, 59, цифровыми дозаторами жидкости 60, 61, 62. Блок 13 имеет интерфейсную связь 63 с бортовым компьютером 9 базового летательного аппарата 1, бортовой компьютер 9 связан интерфейсом 64 с бортовыми компьютерами 31, 32, 33 БПЛА 2, 3, 4. Модули дозирования 40, 41, 42 БПЛА 2, 3, 4 снабжены интерфейсной связью с бортовыми компьютерами 31, 32, 33 и соединены гибкой трубопроводной связью с распределительными клапанами 49, 50, 51 блока 13.
Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации в точном земледелии работает следующим образом.
Комплекс летательных аппаратов устанавливается на горизонтальной поверхности перед сельскохозяйственным полем. Базовый летательный аппарат соединяется гибкими связями 5, 6, 7 с БПЛА 2, 3, 4 соответственно; концы гибких связей 5, 6, 7 разматываются лебедками 16, 17, 18 и фиксируются на штанге 14 летательного аппарата 1, другие концы гибких связей 5, 6, 7 посредством устройств 25, 26, 27 подсоединяются к БПЛА 2, 3, 4.
Перед началом полета в бортовой компьютер 9 базового летательного аппарата 1 вводится программа согласованного распределенного контроля, связи и управления БПЛА 2, 3, 4 и интегрированная в систему распределенного управления БПЛА программа дифференцированной обработки сельскохозяйственного поля в виде электронной карты-задания на дифференцированное внесение заданного количества жидких средств химизации каждым БПЛА 2, 3, 4 на каждом элементарном участке обрабатываемого поля.
Процессы взаимосвязанного распределенного управления БПЛА и процесс дифференцированного внесения жидких средств химизации отображаются в специальной программе, являющейся резидентной базой данных, необходимых для работы комплекса летательных аппаратов в режиме реального времени. При этом обрабатываемое сельскохозяйственное поле площадью S разбивается на прямоугольные участки площадью S1, S2, S3, Sn-1, … Sn шириной захвата b, равной длине  штанги 34, 35, 36 БПЛА 2, 3, 4, и длиной, равной длине L участка обрабатываемого сельскохозяйственного поля.
штанги 34, 35, 36 БПЛА 2, 3, 4, и длиной, равной длине L участка обрабатываемого сельскохозяйственного поля.
Внутри каждого участка площади S1, S2, S3, Sn-1, … Sn выделены элементарные участки с пространственными географическими координатами, отображающие мелкомасштабные неоднородности засорения агроценозов сорными растениями, или участки поражения болезнями и вредителями, или участки поля, требующие внесения разных доз минеральных удобрений.
БПЛА образуют в полете одно или несколько взаимосвязанных заданными расстояниями между собой треугольных звеньев АБС и СДЕ (фиг. 2), находящихся в одной горизонтальной плоскости, параллельной обрабатываемому полю, на расстоянии от поля, равном рабочей высоте обработки сельскохозяйственных культур.
Центр масс А, В, С, Д, Е каждого из БПЛА 2, 3, 4, n-1, n (фиг. 2) совмещен с вершинами равнобедренных треугольников ABC и СДЕ, образующих в полете одно (фиг. 1) или несколько (фиг. 2) взаимосвязанных треугольных звеньев, при этом расстояние b между соседними БПЛА равно длине штанги , а расстояние В между БПЛА, центр масс которых расположен в вершинах углов ВАС, ВСА, ДСЕ и ДЕС, составляет 2.
Бак 11 базового летательного аппарата 1 заправляется раствором жидкого средства химизации в соответствии с картой-заданием обработки сельскохозяйственного поля. Комплекс из базового летательного аппарата 1, управляемый с помощью пилотажно-навигационного устройства, и БПЛА 2, 3, 4, управляемые посредством распределенной системы контроля, связи и управления беспилотными летательными аппаратами, занимают заданную рабочую высоту полета, причем БПЛА 2, 3, 4 располагаются ниже базового летательного аппарата 1 и находятся в одной плоскости, параллельной обрабатываемой поверхности поля. После взлета комплекс летательных аппаратов из вертолета 1 и БПЛА 2, 3, 4 подлетает к краю обрабатываемого участка сельскохозяйственного поля, занимая стартовые координаты начала обработки, определяемые по сигналам от навигационных приемников ГЛОНАСС/GPS 9 базового летательного аппарата 1 и приемников 28, 29, 30 БПЛА 2, 3, 4 соответственно; при этом ведущий БПЛА 3 устанавливается таким образом, что штанга 35 с форсунками 38 совмещается с начальной границей обрабатываемого участка сельскохозяйственного поля.
Бортовой компьютер 9 базового летательного аппарата 1 передает управляющие сигналы через интерфейсы 63 и 64 в блок 13 к бортовым компьютерам 31, 32, 33 БПЛА 2, 3, 4. Открываются клапаны 43 и 44, включается насосный агрегат 12, ЖСХ по гидролинии 52 из бака 11 поступают к клапану 47, который поддерживает постоянный перепад давления на выходе. За счет байпасирования рабочего потока через клапан 46 по гидролинии 53 часть ЖСХ сливается обратно в бак, а другая часть потока ЖСХ по гидролинии 55 идет на перемешивание ЖСХ в баке 11. От клапана 47 поток ЖСХ поступает к расходомеру 48, посредством которого определяется текущее значение расхода, передаваемое в компьютер 9. От расходомера 48 поток ЖСХ по гидролинии 56 поступает в клапаны 49, 50, 51 и далее по трубопроводам 19, 20, 21 - к дозаторам 60, 61, 62. По сигналу от компьютеров 31, 32, 33 открываются клапаны 57, 58, 59 на БПЛА 2, 3, 4.
В режиме установившегося горизонтального полета комплекса летательных аппаратов на заданной высоте и по заданному маршруту в соответствии с программой дифференцированной обработки сельскохозяйственного поля и электронными картами-заданиями на дифференцированное внесение ЖСХ каждым БПЛА 2, 3, 4 с учетом координат, считываемых приемниками ГЛОНАСС/GPS 9 и 28, 29, 30, посредством дозаторов 60, 61, 62 производится автоматическое отмеривание и выдача в единицу времени по заданной программе заданного количества ЖСХ, которое диспергируется форсунками 37, 38, 39 с шириной захвата, равной длине штанги 34, 35, 36 БПЛА 2, 3, 4. При этом каждый из БПЛА 2, 3, 4 обрабатывает свою полосу сельскохозяйственного поля с дифференциацией доз и норм ЖСХ для тех участков поля, которые определены электронной картой обработки. Относительное положение и контроль БПЛА 2, 3, 4 в группе, определение географического местоположения группы БПЛА в целом и каждого из БПЛА 2, 3, 4, связь БПЛА 2, 3, 4 между собой, взаимодействие с базовым летательным аппаратом 1 обеспечиваются системой распределенного контроля, связи и управления.
Если внесение ЖСХ на участках обрабатываемого поля не требуется, например не требуется внесение ЖСХ БПЛА 2, то клапан 57 БПЛА 2 закрывается, дозатор 60 отключается, и ЖСХ от клапана 49 сбрасывается по гидролинии 54 в бак 11. При обработке края сельскохозяйственного поля, когда обрабатывается полоса поля меньше суммарной рабочей ширины захвата всех БПЛА 2, 3, 4, ЖСХ могут вноситься одним или двумя БПЛА.
Применение заявляемого устройства обеспечит дифференцированное внесение жидких средств химизации с заданным нормативным качеством и распределением на каждом элементарном участке и по всей площади обрабатываемого поля, сократит дозы вносимых удобрений на 25-30% и нормы внесения средств защиты растений на 10-60%.
Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии, содержащий базовый летательный аппарат вертолетного типа, снабженный пилотажно-навигационным оборудованием, приемником сигналов глобальной спутниковой навигационной системы, бортовым компьютером со встроенной системой распределенного контроля, связи и управления беспилотными летательными аппаратами и модулем программного обеспечения дифференцированной обработки сельскохозяйственного поля, блоком автоматического управления расходом, распределением и подачей жидких средств химизации, баком для жидких средств химизации, гибкими связями с беспилотными летательными аппаратами с закрепленными на них электрокабелями и трубопроводами, соединенную с базовым вертолетом группу из n-го количества беспилотных летательных аппаратов вертолетного типа, каждый их которых снабжен приемником сигналов глобальной навигационной спутниковой системы, бортовым компьютером, системой автоматического управления полетом на заданных режимах, модулем программного обеспечения дифференцированного внесения жидких средств химизации и модулем диспергирования в виде штанги с форсунками, отличающийся тем, что в группе нечетное количество, по крайней мере не менее 3, беспилотных летательных аппаратов, центр масс каждого из которых совмещен с вершинами углов одного или нескольких равнобедренных треугольников, образующих в полете одно или несколько взаимосвязанных треугольных звеньев из беспилотных летательных аппаратов, находящихся в одной горизонтальной плоскости, параллельной обрабатываемому полю, отстоящей от обрабатываемой поверхности поля на расстоянии, равном рабочей высоте обработки сельскохозяйственных культур, расстояние между соседними беспилотными летательными аппаратами равно длине штанги с форсунками каждого беспилотного летательного аппарата, при этом все штанги с форсункам выполнены одинаковой длины, каждая штанга с форсунками соединена с соответствующими модулями дозирования, снабженными интерфейсной связью с бортовым компьютером каждого беспилотного летательного аппарата, модули дозирования соединены гибкой трубопроводной связью с соответствующим распределительным клапаном блока автоматического управления расходом, распределением и подачей жидких средств химизации базового летательного аппарата, содержащего фронтальную штангу длиной, не превышающей диаметра несущего винта базового летательного аппарата, и автоматические лебедки, количество которых равно числу гибких связей с беспилотными летательными аппаратами, каждый модуль программного обеспечения дифференцированного внесения жидких средств химизации каждого беспилотного летательного аппарата функционально связан с модулем программного обеспечения для дифференцированной обработки всего сельскохозяйственного поля, оба модуля интегрированы в систему распределенного контроля, связи и управления беспилотными летательными аппаратами, а каждый модуль диспергирования жидких средств химизации на каждом беспилотном летальном аппарате связан с модулем дозирования.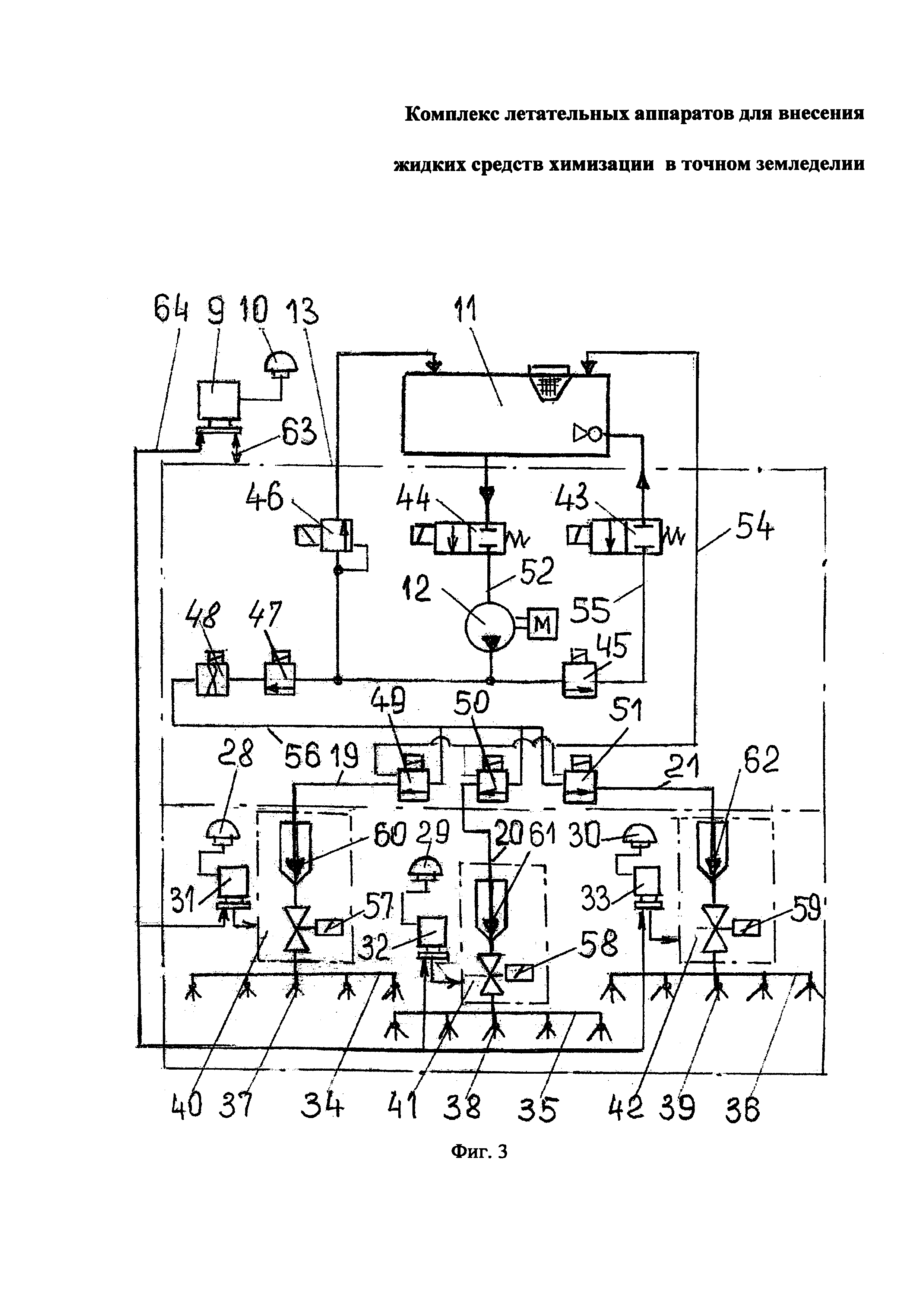
Механический плодосъемник
Способ возделывания картофеля и топинамбура в двупольном севообороте
Способ изготовления порошковой проволоки для износостойких покрытий
Система автоматической сортировки животных по результатам взвешивания и идентификации номера с использованием селекционных ворот для выделения в ветеринарный бокс
Комбинированная лапа культиватора
Способ получения лигатуры для борирования стали
Концентратор солнечной энергии
Способ сушки мелкосеменных культур и устройство для его осуществления
Полевой опрыскиватель для автоматического регулирования технологического процесса внесения жидких минеральных удобрений
Беспилотный робот для магнитно-импульсной обработки растений
Составной лемех
Способ нанесения многокомпонентного покрытия при электродуговой металлизации
Устройство для испытания распылителей
Селекционный мотоблок-опрыскиватель
Беспилотный робот для внесения гербицидов
Универсальный высевающий аппарат
Устройство и способ усиления электрических сигналов
Теребильно-очесывающий адаптер для уборки топинамбура
Сменный гусеничный движитель колесного транспортного средства
Способ сушки зерна

