Результат интеллектуальной деятельности: СПОСОБ МНОГОСТУПЕНЧАТОЙ ФИЛЬТРАЦИИ ДЛЯ СИСТЕМ АВТОСОПРОВОЖДЕНИЯ
Вид РИД
Изобретение
Изобретение относится к радиоэлектронным системам сопровождения интенсивно маневрирующих целей, в частности к следящим дальномерам и угломерам бортовых РЛС.
Расширение номенклатуры сверхманевренных (СМЛА) и гиперзвуковых (ГЗЛА) летательных аппаратов приводит к усложнению процесса наведения, что проявляется в значительном усложнении алгоритмов траекторного управления перехватчиков [1, 2], связанному с необходимостью учета в законе управления высоких производных координат относительного и абсолютного движения перехватчика и цели [3]. В связи с этим следящие системы бортовых РЛС должны формировать оценки производных координат состояния высоких (до четвертого) порядков.
Необходимо отметить, что в ряде радиолокационных систем, в частности - в угломерных системах, оценивание высоких производных затруднено в виду того, что непосредственно измеряются только углы (бортовые пеленги) [4]. Ниже предлагается способ многоступенчатой фильтрации, позволяющий оценивать высокие производные фазовых координат с высокой точностью, даже при малом числе непосредственно наблюдаемых координат.
Обычно для решения задач фильтрации используется фильтр Калмана, который в общем случае позволяет для системы

при наличии наблюдений

сформировать оптимальные по критерию минимума суммарной дисперсии ошибок оценки по правилу [5]

Здесь x(k) и  - соответственно n-мерные векторы координат состояния оцениваемого процесса и их оценок; хэ - вектор экстраполяции оценок , Ф - переходная матрица состояния системы; z(k) - m-мерный (m≤n) вектор измерений; Н - матрица формирования наблюдений, Кф - матрица коэффициентов усиления невязки; D - ковариационная матрица ошибок фильтрации; Dи и Dx - соответственно ковариационные матрицы шумов измерений ξи (2) и возмущений ξх (1), k - номер шага, Dэ - матрица ошибок экстраполяции.
- соответственно n-мерные векторы координат состояния оцениваемого процесса и их оценок; хэ - вектор экстраполяции оценок , Ф - переходная матрица состояния системы; z(k) - m-мерный (m≤n) вектор измерений; Н - матрица формирования наблюдений, Кф - матрица коэффициентов усиления невязки; D - ковариационная матрица ошибок фильтрации; Dи и Dx - соответственно ковариационные матрицы шумов измерений ξи (2) и возмущений ξх (1), k - номер шага, Dэ - матрица ошибок экстраполяции.
Из (3) следует, что в фильтре Калмана число обратных связей, формируемых в невязке (z(k)-H(k)хэ(k)), определяется числом используемых измерителей, что предопределяет его недостаток: склонность к потере устойчивости (появлению расходимости) либо ухудшение точности формирования оценок высоких производных процесса (1)-(7), при использовании малого числа измерителей.
Данный недостаток можно скомпенсировать, применив несколько последовательно соединенных фильтров с нарастающей размерностью.
Задачей изобретения является разработка способа формирования оценок координат состояния, обеспечивающего высокую точность оценивания высоких производных и устойчивость фильтрации при малом числе измеряемых координат.
Поставленная задача достигается тем, что сигнал наблюдений координат состояния подается на вход многоступенчатого фильтра, представляющего собой серию последовательного соединенных фильтров нарастающей размерности (n≥2), каждый из которых формирует оценки, используемые в следующем фильтре в качестве измерений, что определяет возрастание в них числа обратных связей и соответственно повышение устойчивости и точности оцениваемых производных.
Технический результат, который может быть получен от использования предлагаемого изобретения, заключается в обеспечении точности и устойчивости формирования оценок высоких производных при малом числе первичных измерителей в перспективных следящих системах.
Принципы функционирования предложенного способа поясняются на примере трехступенчатого фильтра четвертого порядка при условии, что используется один измеритель. Его функциональная схема приведена на фигуре 1, где:
Ф1 - первая ступень многоступенчатого фильтра, формирующая оценки  и передающая их на вторую ступень в качестве измерений;
и передающая их на вторую ступень в качестве измерений;
Ф2 - вторая ступень многоступенчатого фильтра, формирующая оценки  и передающая их на вторую ступень в качестве измерений;
и передающая их на вторую ступень в качестве измерений;
Ф3 - третья ступень многоступенчатого фильтра, формирующая оценки  и передающая их потребителю.
и передающая их потребителю.
Эффективность предложенного способа многоступенчатой фильтрации была проверена на примере формирования оценок угла и его производных вплоть до четвертого порядка при наличии одного измерителя (угла).
Для сравнения был использован в качестве прототипа классический фильтр Калмана четвертого порядка при использовании одного измерителя, полученный на основе (2)-(7).
В приложении к рассматриваемой задаче в прототипе была использована модель состояния
при использовании одного измерителя

Где х1, х2, х3, х4 - координаты состояния оцениваемого процесса, ΔT - дискрет времени.
На основе (8) и (9) по алгоритму (3)-(5) формируются оценки по правилу
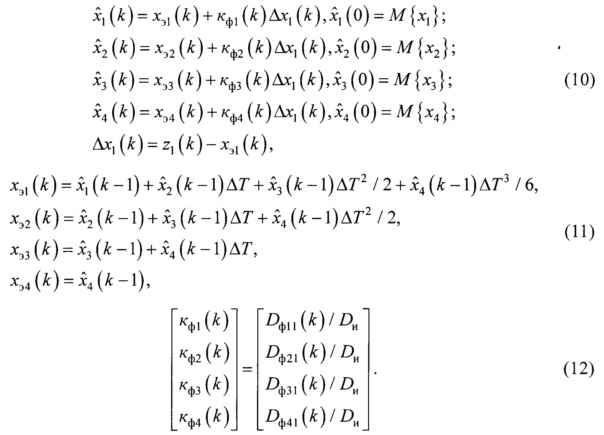
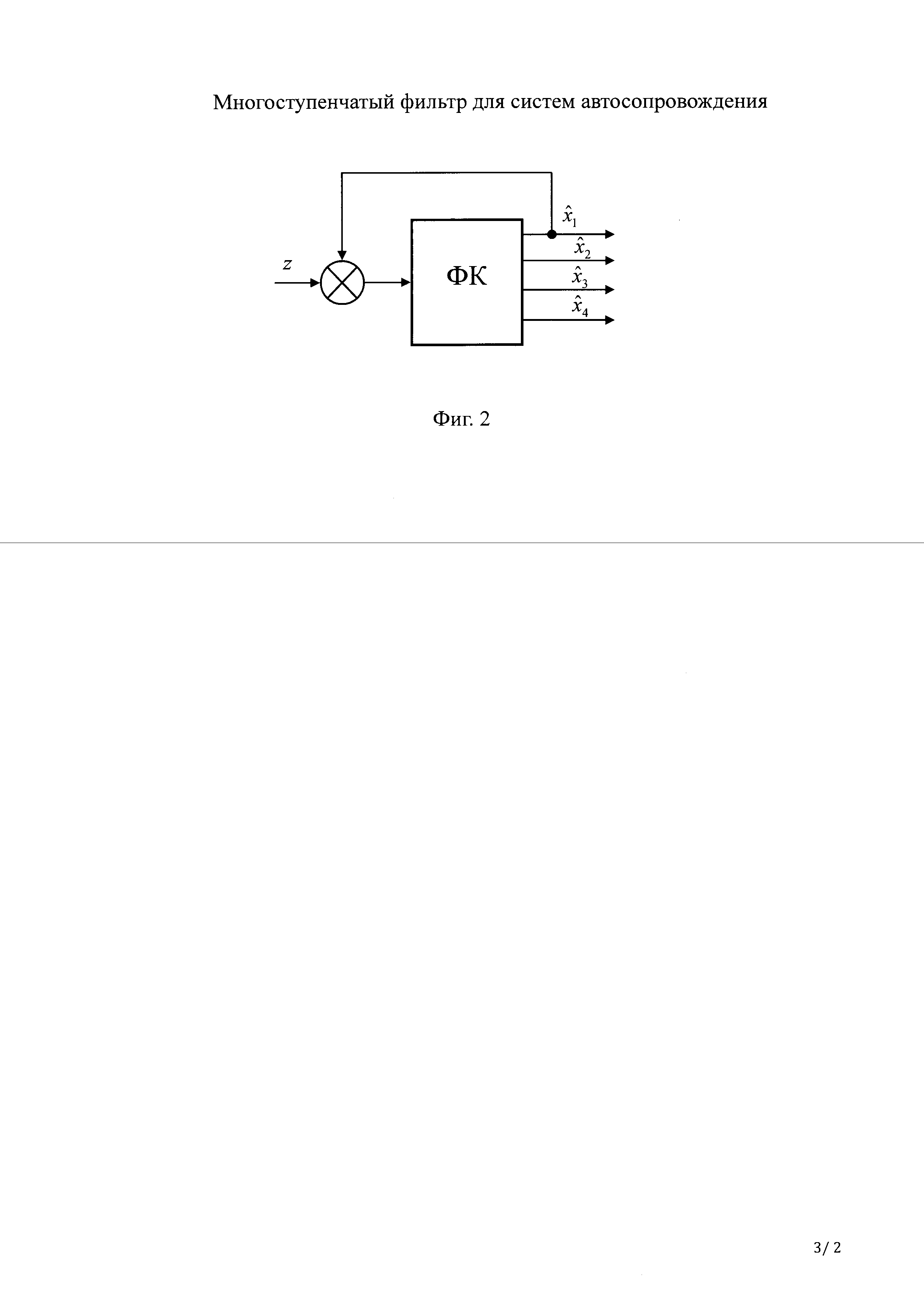
Здесь  и хэ1, хэ2, хэ3, хэ4 - соответственно оценки координат состояния оцениваемого процесса х1, х2, х3, х4 и их экстраполяции; κф1, κф2, κф3, κф4 - компоненты матрицы усиления невязки Кф, М - знак операции математического ожидания возможных значений координат состояния. Где вычисляются по правилу (6)-(7), при известной дисперсии DK ошибок измерений (9). Упрощенная структура такого фильтра, использованного в качестве прототипа, приведена на фигуре 2.
и хэ1, хэ2, хэ3, хэ4 - соответственно оценки координат состояния оцениваемого процесса х1, х2, х3, х4 и их экстраполяции; κф1, κф2, κф3, κф4 - компоненты матрицы усиления невязки Кф, М - знак операции математического ожидания возможных значений координат состояния. Где вычисляются по правилу (6)-(7), при известной дисперсии DK ошибок измерений (9). Упрощенная структура такого фильтра, использованного в качестве прототипа, приведена на фигуре 2.
Анализ (10)-(12) показывает, что в данном фильтре имеется только одна отрицательная обратная связь, что будет приводить в ряде случаев к потере устойчивости и снижению точности формирования оценок координат состояния.
Необходимо, однако, отметить, что при сопровождении сверхманевренных (СМЛА) и гиперзвуковых (ГЗЛА) летательных целей, движущихся по сложным пространственным траекториям даже в первом фильтре, в котором оценивается только измеряемая координата и ее производная (фигура 1), как правило, происходит срыв сопровождения, обусловленный выходом невязки за пределы линейных участков пеленгационных (дискриминационных) характеристик (фигура 3).
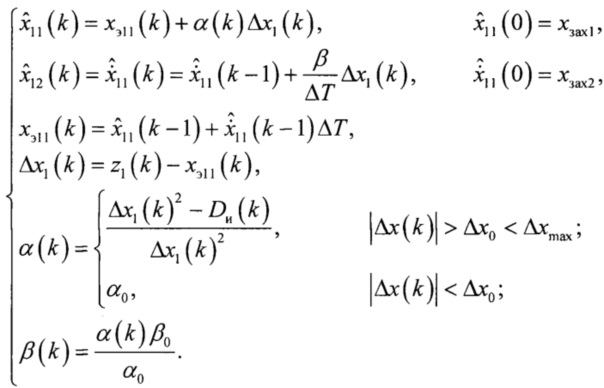
Наиболее радикальным способом устранения этого недостатка является использование в качестве первой ступени адаптивного α, β - фильтра, алгоритм функционирования которого определяется соотношениями
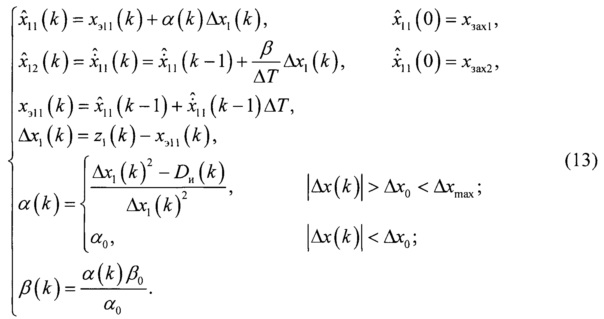
В (13):  - оценки координат х1, х2 на k-м шаге; хэ11(k) - экстраполяция координаты x11(k); Δх(k) - невязка измерений; α(k), β(k) - коэффициенты усиления невязки, ΔT - дискрет времени; D1 и D2 - дисперсии ошибок фильтрации x11(k) и х12(k); Δх0 - порог, определяющий начало адаптации х1; Δxmax - максимальное значение ошибки сопровождения, определяемое шириной линейного участка дискриминационной характеристики.
- оценки координат х1, х2 на k-м шаге; хэ11(k) - экстраполяция координаты x11(k); Δх(k) - невязка измерений; α(k), β(k) - коэффициенты усиления невязки, ΔT - дискрет времени; D1 и D2 - дисперсии ошибок фильтрации x11(k) и х12(k); Δх0 - порог, определяющий начало адаптации х1; Δxmax - максимальное значение ошибки сопровождения, определяемое шириной линейного участка дискриминационной характеристики.
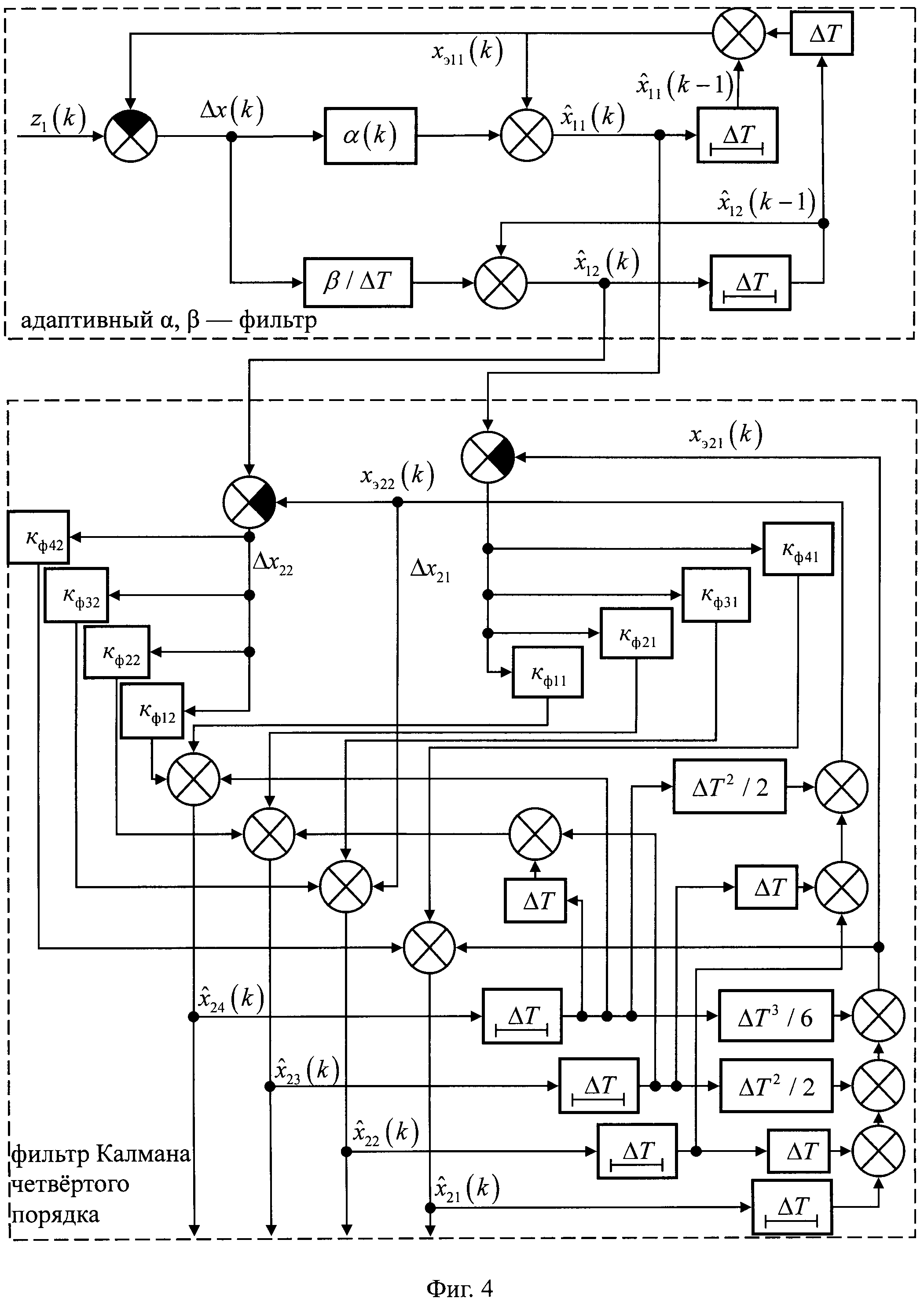
В качестве второй ступени предлагается использовать фильтр Калмана четвертого порядка (2)-(5), использующего измерения  , сформированные в первой ступени:
, сформированные в первой ступени:
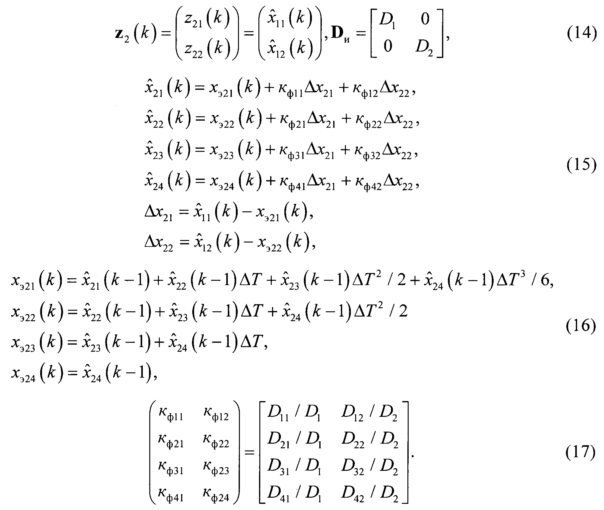
Функциональная схема предлагаемого двухступенчатого фильтра, определяемого соотношениями (13)-(17), приведена на фигуре 4.
Анализ способа (13)-(17) формирования оценок позволяет сделать следующие заключения:
- полученный закон отличается от прототипа (10)-(12) тем, что в нем производится многоступенчатая фильтрация, когда в качестве первой ступени используется адаптивный α, β - фильтр, а качестве второй - четырехмерный фильтр Калмана, что позволяет повысить точность и устойчивость формирования оценок за счет увеличения количества обратных связей во второй ступени;
- для использования алгоритма не требуется дополнительных измерений по сравнению с прототипом;
- предложенный алгоритм формирования оценок не накладывает принципиальных ограничений на возможность его реализации.
Проверка эффективности предложенного способа многоступенчатой фильтрации осуществлялась по результатам имитационного моделирования системы углового сопровождения интенсивно маневрирующей цели, движущейся по закону

при условии, что используется моноимпульсный угломер [4], с линейным участком пеленгационной характеристики 2Δxmax=0.2рад (фигура 3), формирующий измерение

где ϕц - текущий пеленг цели; а  - его первая, вторая, третья и четвертая производные, ξи - шум измерений с известной дисперсией Dи.
- его первая, вторая, третья и четвертая производные, ξи - шум измерений с известной дисперсией Dи.
Достоинством модели (18) является ее адекватность реальным условиям перемещения цели в широком поле условий применения, поскольку манипулируя  можно получить законы изменения ϕц практически любой сложности.
можно получить законы изменения ϕц практически любой сложности.
В качестве показателя точности формирования оценок использованы ошибки оценивания пеленга цели, ее первой, второй и третьей производных:

В процессе исследования моделировались: отслеживаемый процесс (18), измерения (19), шумы измерения, адаптивный α, β - фильтр (13) со вторым фильтром (14)-(17). Для сравнения для тех же условий моделировался одноступенчатый фильтр Калмана (10)-(12).
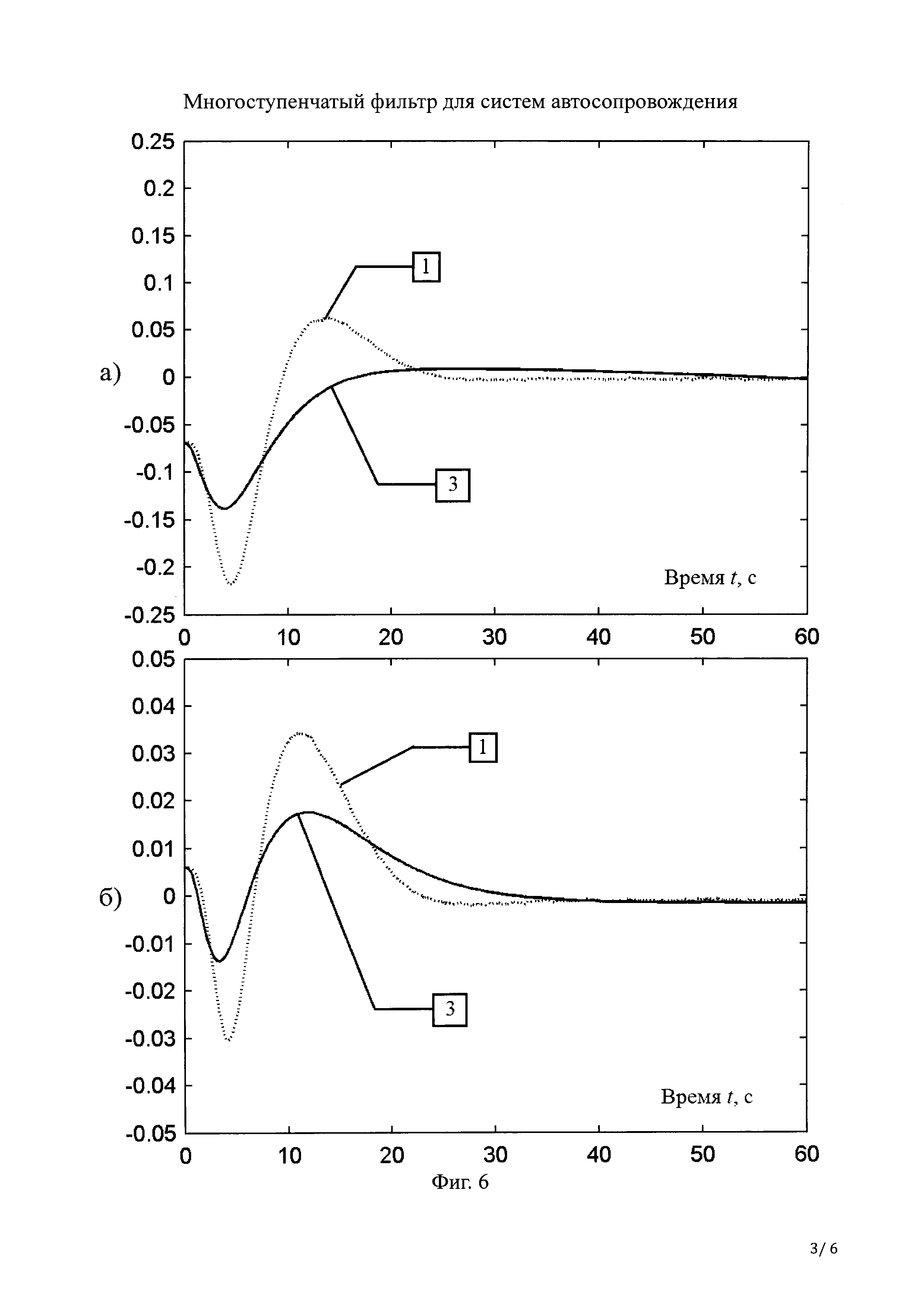
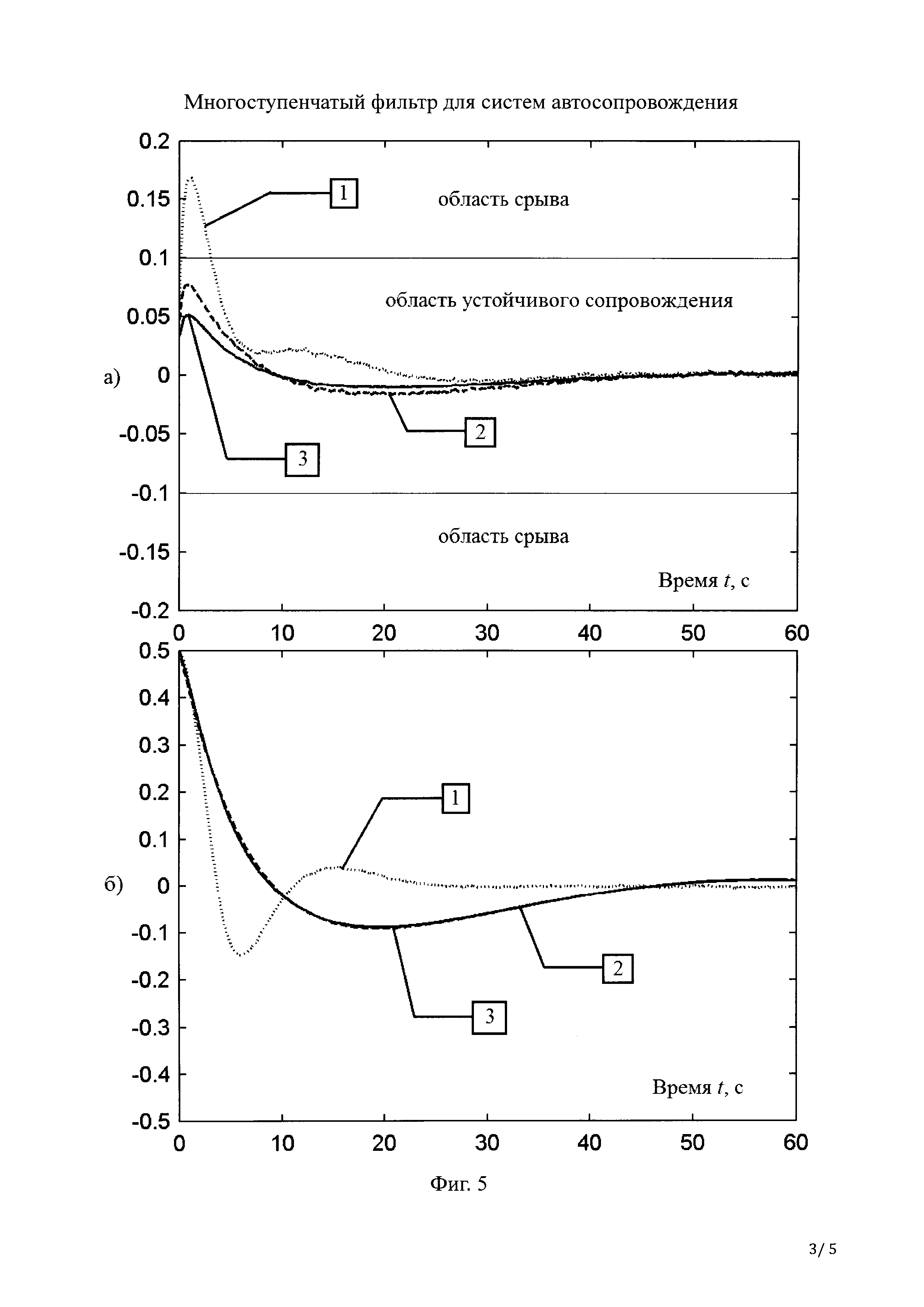
На фигурах 5 и 6 отображены полученные в ходе моделирования зависимости относительных ошибок оценивания по углу (фигура 5а), его первой производной (фигура 5б), второй производной (фигура 6а), третьей производной (фигура 6б) от времени, где различным линиям соответствуют различные фильтры: 1 - классический фильтр Калмана (10)-(12); 2 - адаптивный α, β - фильтр (13); 3 - двухступенчатый фильтр (13)-(17).
Поскольку при использованных условиях в классическом фильтре Калмана происходит срыв сопровождения (Δx>Δxmax, фигура 5а), для него показаны условные переходные процессы, которые имели бы место при отсутствии срыва.
Проведенное моделирование позволяет сделать следующие заключения:
- фильтр Калмана четвертого порядка, рассмотренный в качестве прототипа, не обеспечивает бессрывного сопровождения интенсивно маневрирующих целей, в законе изменения пространственного положения которых содержатся производные высокого порядка, а соответственно не может быть использован для их оценивания;
- предложенный способ многоступенчатой фильтрации позволяет обеспечить бессрывное сопровождение интенсивно маневрирующих целей с высокоточным оцениванием производных третьего и четвертого порядка при малом числе используемых измерителей.
Литература
1. Меркулов В.И. Динамичность авиационных комплексов и бортовые радиоэлектронные системы. - М.: Радиотехника. - 2010, №1. - С. 88-96.
2. Ильчук А.Р., Меркулов В.И., Самарин О.А., Юрчик И.А. Влияние интенсивного маневрирования целей на показатели эффективности системы первичной обработки сигналов в бортовых РЛС. Радиотехника. - 2003, №6.
3. Верба B.C., Меркулов В.И., Соколов Д.А. Сопровождение интенсивно маневрирующих целей инерционным угломером в системах одноразового применения. Информационно-измерительные и управляющие системы. - 2014, №3. - С. 13-18.
4. Меркулов В.И. [и др]. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003. - 390 с.
5. Меркулов В.И., Дрогалин В.В., Канащенков А.И. и др. Авиационные системы радиоуправления. Т. 1. Принципы построения систем радиоуправления. Основы синтеза и анализа. / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003. - 390 с.

















Блокинг-генератор для работы в режиме автогенератора
Система управления в продольном канале пилотируемых и беспилотных летательных аппаратов в режиме увода с опасной высоты при работе по наземным объектам
Способ изготовления устройства энергонезависимого шифрования многопотокового оптического сигнала в каналах передачи информации
Устройство формирования и излучения мощных радиоимпульсов
Система автоматизированного модального управления в продольном канале летательных аппаратов
Дистанционная резервированная система автоматизированного модального управления в продольном канале маневренных пилотируемых и беспилотных летательных аппаратов
Блокинг-генератор для работы в ждущем режиме
Теннисный стол
Способ изготовления трехмерного электронного модуля
Сверхширокополосная активная антенная решетка с электрическим сканированием
Блокинг-генератор для работы в режиме автогенератора
Система управления в продольном канале пилотируемых и беспилотных летательных аппаратов в режиме увода с опасной высоты при работе по наземным объектам
Способ изготовления устройства энергонезависимого шифрования многопотокового оптического сигнала в каналах передачи информации
Устройство формирования и излучения мощных радиоимпульсов
Система автоматизированного модального управления в продольном канале летательных аппаратов
Дистанционная резервированная система автоматизированного модального управления в продольном канале маневренных пилотируемых и беспилотных летательных аппаратов
Блокинг-генератор для работы в ждущем режиме
Теннисный стол
Способ изготовления трехмерного электронного модуля
Способ трассового сопровождения воздушных маневрирующих источников радиоизлучения по пеленговой информации от однопозиционной системы радиотехнической разведки воздушного базирования

