Результат интеллектуальной деятельности: ОБНАРУЖИТЕЛЬ МАНЕВРА БАЛЛИСТИЧЕСКОЙ РАКЕТЫ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях (РЛС) для обнаружения маневра баллистических ракет (БР). Задачу определения времени начала и окончания маневра необходимо решать для того, чтобы не допустить появления методических ошибок определения параметров баллистической траектории и срыва автосопровождения БР. В частности, координаты точки падения ракет малой и средней дальности, вычисленные по радиолокационным измерениям, произведенным на участке маневра, могут определяться с недолетом или перелетом от нескольких десятков до нескольких сотен километров.
На траектории БР можно выделить три участка (смотри фиг. 1):
- активный участок траектории (АУТ), на котором БР движется под действием силы тяги двигателей и совершает маневр большой интенсивности;
- пассивный участок траектории (ПУТ), начинающийся после выключения двигателей, на котором БР движется по инерции под действием известной силы притяжения к Земле, маневр отсутствует, поэтому траектория БР и координаты точки ее падения могут быть определены с высокой точностью;
- участок маневра, как правило, на нисходящей ветви ПУТ, на котором БР движется под действием управляющих сил аэродинамических рулей или специальных ракетных двигателей, поэтому траектория отличается от баллистической и ее параметры определяются с методическими ошибками.
Известны обнаружители маневра (ОМ), в которых реализованы способы обнаружения маневра на основе оценивания ускорения или скорости изменения прямоугольных координат летательного аппарата, использования алгоритмов параметрической идентификации оцениваемых параметров с их априорными значениями и приемов обнаружения расходимости процесса фильтрации параметров и др. [1, С. 310-311; 2, С. 194-214].
Основным недостатком этих ОМ является низкая вероятность обнаружения маневра при грубых измерениях азимута и угла места, а также низкая вероятность или невозможность выявления маневра БР на ПУТ.
Известны ОМ, в которых реализованы алгоритмы выявления скачка скорости изменения фокального параметра траектории БР [3, С. 374-379].
Основным недостатком этих ОМ является низкая вероятность обнаружения маневра при грубых измерениях азимута и угла места, а также сложность их реализации на ЭВМ из-за больших вычислительных затрат.
Известен ОМ, в котором реализован способ обнаружения маневра БР на ПУТ по разности оценок скорости изменения произведения дальности на радиальную скорость [4].
Этот ОМ характеризуется высокой вероятностью обнаружения маневра. К его недостаткам следует отнести сложность реализации, так как необходимо измерять радиальную скорость БР с высокой точностью.
Наиболее близким аналогом заявленному изобретению, то есть прототипом, в котором устранено влияние ошибок измерения азимута и угла места на вероятность обнаружения маневра, является ОМ, в котором реализован способ обнаружения времени окончания АУТ по выборке квадратов дальности [5].
Сущность обнаружения маневра устройством-прототипом заключается в том, что решение об окончании АУТ, то есть об окончании маневра БР, принимают в момент времени, когда знак оценки ускорения по квадрату дальности меняется с отрицательного на положительный.
Схема прототипа, в котором обнаружение времени окончания маневра (АУТ) осуществляют по фиксированной выборке из 7-ми квадратов дальности, приведена на фиг. 2.
В РЛС измеряют дальность в цифровом виде, производят перемножение этих сигналов в блоке 1 и получают квадраты дальности. Автосопровождение цели осуществляют в «скользящем окне» из 7-ми квадратов дальности  По этой выборке на выходе блока 2, называемого цифровым нерекурсивным фильтром (ЦНРФ), получают сглаженное значение, то есть оценку, второго приращения квадрата дальности
По этой выборке на выходе блока 2, называемого цифровым нерекурсивным фильтром (ЦНРФ), получают сглаженное значение, то есть оценку, второго приращения квадрата дальности  путем оптимального взвешенного суммирования квадратов дальности:
путем оптимального взвешенного суммирования квадратов дальности:  Затем эту оценку делят в блоке 3 на период обзора РЛС (период измерения дальности) во второй степени
Затем эту оценку делят в блоке 3 на период обзора РЛС (период измерения дальности) во второй степени  и получают оценку ускорения по квадрату дальности
и получают оценку ускорения по квадрату дальности  . Далее в блоке 5 вычисляют среднеквадратическую ошибку (СКО) оценки ускорения по квадрату дальности:
. Далее в блоке 5 вычисляют среднеквадратическую ошибку (СКО) оценки ускорения по квадрату дальности:  где σr - СКО измерения дальности.
где σr - СКО измерения дальности.
В каждом новом положении «скользящего окна» сравнивают в пороговом устройстве (блок 4) оценку ускорения по квадрату дальности с СКО  . Если
. Если  , то принимают решение о наличии маневра, то есть о нахождении цели на активном участке траектории. Решение об окончании маневра, то есть о начале пассивного участка траектории (ПУТ), принимают в момент времени, когда
, то принимают решение о наличии маневра, то есть о нахождении цели на активном участке траектории. Решение об окончании маневра, то есть о начале пассивного участка траектории (ПУТ), принимают в момент времени, когда  .
.
Достоинством прототипа является простота его структурной схемы и высокая вероятность обнаружения времени окончания АУТ, то есть конца маневра БР, приближающихся к РЛС, из-за устранения влияния ошибок измерения угла места и азимута.
К недостаткам прототипа следует отнести невозможность обнаружения маневра БР на ПУТ, а также выявления времени окончания АУТ (конца маневра) БР, удаляющихся от РЛС, так как оценки ускорения будут положительными  как на невозмущенной баллистической траектории, так и на участках маневра.
как на невозмущенной баллистической траектории, так и на участках маневра.
Техническим результатом изобретения является повышение вероятности обнаружения маневра БР без усложнения структурной схемы прототипа.
Указанный технический результат достигается тем, что в заявленном ОМ, в отличие от прототипа, реализован алгоритм обнаружения маневра БР путем сравнения разности между оценками второго приращения квадрата дальности, вычисляемыми по выборкам квадратов дальности разного объема, с среднеквадратической ошибкой определения этой разности.
Сущность алгоритма заключается в следующем.
Сначала вычисляют абсолютную разность  оценок второго приращения квадрата дальности по двум выборкам из N и N-2k квадратов дальности. При этом начало и конец выборки меньшего объема удалены от начала и конца выборки большего объема, то есть от границ «скользящего окна», на равное число k обзоров:
оценок второго приращения квадрата дальности по двум выборкам из N и N-2k квадратов дальности. При этом начало и конец выборки меньшего объема удалены от начала и конца выборки большего объема, то есть от границ «скользящего окна», на равное число k обзоров:

где 
где  - весовые коэффициенты вычисления оценки второго приращения [6, С. 155-156];
- весовые коэффициенты вычисления оценки второго приращения [6, С. 155-156];
N - число измерений дальности (объем «скользящего окна»);
i - порядковый номер измерения дальности в выборке.
Затем вычисляют СКО определения этой разности оценок путем суммирования квадратов весовых коэффициентов:

Далее решение о наличии или об отсутствии маневра БР принимают по следующему алгоритму:
если  маневр отсутствует,
маневр отсутствует,
если  маневр обнаружен.
маневр обнаружен.
Если в состав обеих выборок входят значения квадратов дальности, измеренные на невозмущенной баллистической траектории, то эта разность, без учета сопротивления воздуха, мала:  где gср - ускорение силы тяжести. Если в состав выборки большего объема попадут измерения дальности с участка маневра, то разность возрастает скачком из-за появления ускорений по декартовым координатам.
где gср - ускорение силы тяжести. Если в состав выборки большего объема попадут измерения дальности с участка маневра, то разность возрастает скачком из-за появления ускорений по декартовым координатам.
В качестве примера получим формулу для вычисления разности между оценкой по выборке из 7-ми квадратов дальности и оценкой по выборке из 5-ти квадратов дальности:
Как видно из этого выражения, разность оценок, как и сами оценки, представляют собой взвешенную сумму квадратов дальности. Поэтому формулу СКО определения разности оценок можно получить путем суммирования квадратов весовых коэффициентов:

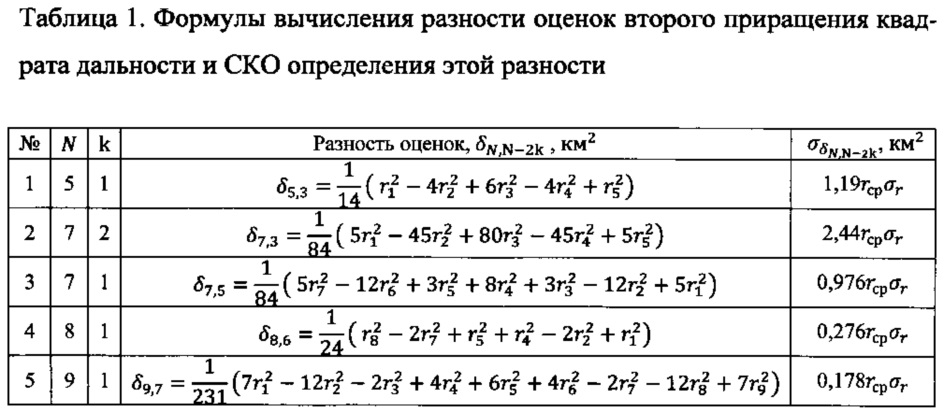
Формулы определения разности оценок и СКО этой разности для других соотношений выборок квадратов дальности приведены в таблице 1.
Для доказательства реализуемости заявленного технического результата в таблице 2 приведены вероятности обнаружения времени окончания АУТ (маневра) ракеты «Атакмс», а в таблице 3 - вероятность обнаружения начала маневра на ПУТ по выборкам из 7-ми и 5-ти квадратов дальности.
Вероятность обнаружения маневра вычисляется по формуле Лапласа: 
Вычисления проводились при следующих исходных данных. РЛС находится в районе точки падения. СКО измерения координат равны: по дальности - σr=25 м, по углу места - σε=1,5°. Участки маневра выделены полужирным шрифтом: конец АУТ - на 25-й секунде, начало маневра на ПУТ - на 175-й секунде.
Как видно из таблиц, конец маневра выявляется с задержкой в 20 секунд, то есть после того, как в выборке почти не осталось измерений дальности, произведенных на АУТ. Начало маневра на ПУТ выявляется с вероятностью, близкой единице, уже в первом обзоре РЛС. На пассивном участке при малых высотах БР на величину разности оценок оказывает сопротивление воздуха (δ7,5=0,2…0,32 км2).
Как показано в [4, 5], реализовать высокие вероятности обнаружения маневра по выборкам горизонтальных декартовых координат и высоты проблематично даже в РЛС с относительно высокоточными измерениями угла места и азимута.
Структурная схема заявленного обнаружителя маневра по выборкам из 7-ми квадратов дальности приведена на фиг. 3, где введены следующие обозначения:
1 - умножитель входных сигналов дальности;
2 - цифровой нерекурсивный фильтр (ЦНРФ);
2.1 - запоминающее устройство;
2.2 - блок умножителей квадратов дальности на весовые коэффициенты;
2.3 - сумматор;
3 - делитель;
4 - пороговое устройство;
5 - вычислитель СКО;
6 - вычислитель квадратного корня;
7 - блок порогового сигнала.
Обнаружитель маневра баллистической ракеты по фиксированной выборке квадратов дальности содержит так же, как прототип, последовательно соединенные умножитель входных сигналов, ЦНРФ, состоящий из последовательно соединенных запоминающего устройства, блока умножителей квадратов дальности на весовые коэффициенты и сумматора, делитель и пороговое устройство, выходы которого являются выходами заявленного устройства, а также содержит вычислитель СКО.
В отличие от прототипа, согласно изобретению, второй вход делителя соединен с выходом вычислителя СКО, вход которого подключен к выходу вычислителя квадратного корня, вход которого подключен к соответствующему выходу запоминающего устройства ЦНРФ. Второй вход порогового устройства соединен с выходом блока порогового сигнала.
В блоке умножителей ЦНРФ, в отличие от прототипа, квадраты дальности умножают на весовые коэффициенты определения разности между оценкой второго приращения квадрата дальности по выборке квадратов дальности большего объема и оценкой по выборке квадратов дальности меньшего объема, на выходе сумматора ЦНРФ получают разность между оценкой второго приращения квадрата по выборке квадратов дальности большего объема и оценкой по выборке квадратов дальности меньшего объема. СКО определения разности между оценками вычисляют путем суммирования квадратов весовых коэффициентов определения разности между оценками и извлечения квадратного корня из полученной суммы.
Таким образом, введение в устройство, содержащее умножитель входных сигналов, ЦНРФ, делитель, пороговое устройство и вычислитель СКО, вычислителя квадратного корня с соответствующими связями, использование в ЦНРФ новых весовых коэффициентов для определения разности между оценкой второго приращения квадрата по выборке квадратов дальности большего объема и оценкой по выборке квадратов дальности меньшего объема, а также для вычисления СКО определения этой разности позволило достичь заявленного технического результата: повышение вероятности обнаружения маневра БР без существенного усложнения структурной схемы прототипа.
Список использованных источников
1. Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: «Радио и связь», 1967, 395 с.
2. Оценивание дальности и скорости в радиолокационных системах. Ч. 2. / Под ред. В.И. Меркулова - М.: «Радиотехника», 2007, 304 с.
3. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: «Советское радио», 1974, 432 с.
4. Патент RU №2524208. Способ радиолокационного обнаружения маневра баллистической цели на пассивном участке траектории.
5. Патент RU №2510861. Способ определения времени окончания активного участка траектории баллистической ракеты.
6. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: «Радио и связь», 1986, 352 с.
7. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. М.: «Наука», 1980.
Обнаружитель маневра баллистической ракеты по фиксированной выборке квадратов дальности, содержащий последовательно соединенные умножитель входных сигналов, цифровой нерекурсивный фильтр (ЦНРФ), состоящий из последовательно соединенных запоминающего устройства, блока умножителей квадратов дальности на весовые коэффициенты и сумматора, делитель и пороговое устройство, выходы которого являются выходами заявленного устройства, а также содержащий вычислитель среднеквадратической ошибки (СКО), отличающийся тем, что в ЦНРФ квадраты дальности умножают на весовые коэффициенты определения разности между оценкой второго приращения квадрата дальности, вычисленной по выборке квадратов дальности большего объема, и оценкой второго приращения квадрата дальности, вычисленной по выборке квадратов дальности меньшего объема, при этом начало и конец выборки меньшего объема удалены от начала и конца выборки большего объема на равное число периодов обзора РЛС, СКО определения разности между оценками вычисляют путем суммирования квадратов весовых коэффициентов определения разности между оценками и извлечения квадратного корня из полученной суммы, второй вход делителя соединен с выходом вычислителя СКО, вход которого подключен к выходу вычислителя квадратного корня, вход которого подключен к соответствующему выходу запоминающего устройства ЦНРФ, второй вход порогового устройства соединен с выходом блока порогового сигнала.
Способ определения коэффициента суммарного сопротивления движению для категорирования испытательных дорог
Способ и устройство обзора пространства в рлс
Датчик измерения параметров углового перемещения
Надульное устройство для пушки
Устройство радиолокационного распознавания воздушно-космических объектов
Кран для погрузки и выгрузки рельсов
Способ получения воды для хозяйственно-питьевых нужд из снега и(или) льда
Способ стрельбы из танковой пушки
Способ подготовки исходных данных при стрельбе из танковой пушки
Машина обеспечения переправ
Способ определения коэффициента суммарного сопротивления движению для категорирования испытательных дорог
Способ и устройство обзора пространства в рлс
Датчик измерения параметров углового перемещения
Надульное устройство для пушки
Устройство радиолокационного распознавания воздушно-космических объектов
Кран для погрузки и выгрузки рельсов
Способ получения воды для хозяйственно-питьевых нужд из снега и(или) льда
Способ стрельбы из танковой пушки
Способ подготовки исходных данных при стрельбе из танковой пушки
Машина обеспечения переправ

