Результат интеллектуальной деятельности: САМОЛЕТ С АДАПТИВНЫМ ЦЕЛЬНОПОВОРОТНЫМ СТАБИЛИЗАТОРОМ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области аэродинамики маневренных самолетов с цельноповоротным стабилизатором и может быть использовано в компоновках многорежимных сверхзвуковых самолетов, а также других сверхзвуковых ЛА, выполненных по нормальной аэродинамической схеме с близкорасположенным к задней кромке крыла стабилизатором.
В качестве прототипа приняты известные маневренные самолеты, выполненные по нормальной аэродинамической схеме (АВИАЦИЯ. Энциклопедия. Научное издательство «Большая Российская энциклопедия». Центральный аэрогидродинамический институт имени профессора Н.Е. Жуковского. Москва 1994, стр. 77-79), с цельноповоротным стабилизатором (органом продольного и поперечного управления) на хвостовой части фюзеляжа, в непосредственной близости за крылом в его плоскости (например, F-22A, Т-50. Национальный аэрокосмический журнал. «ВЗЛЕТ». 3.2010, стр. 12-14, 17-28).
Характерными аэродинамическими особенностями самолетов с таким стабилизатором являются:
1. Значительное смещение аэродинамического фокуса самолета назад при переходе от дозвукового к сверхзвуковому полету, что приводит к увеличению балансировочного сопротивления, снижению аэродинамического качества и уменьшению дальности сверхзвукового полета.
2. Уменьшение эффективности стабилизатора и продольной устойчивости на взлетно-посадочных режимах при попадании стабилизатора в область заторможенного потока за отклоненной механизацией крыла (элевонов).
3. Снижение эффективности корневого элевона при управлении по тангажу и крену из-за возникновения на стабилизаторе приращений моментов противоположного знака, связанных с увеличением скосов потока при отклонении элевона.
4. Уменьшение эффективности вертикального оперения и путевой устойчивости самолета с увеличением углов атаки и скольжения (при боковом ветре) на взлетно-посадочных режимах.
5. Уменьшение эффективности вертикального оперения и путевой устойчивости самолета с увеличением скорости полета до сверхзвуковой, а при достаточно больших сверхзвуковых числах М и полная потеря путевой устойчивости самолета.
6. Уровень потребной путевой устойчивости на рассмотренных в пп. 4 и 5 режимах полета обычно обеспечивается за счет увеличения площади вертикального оперения или установкой подфюзеляжных гребней.
Таким образом, обеспечение путевой устойчивости является общей задачей аэродинамики сверхзвуковых ЛА.
Задачей и техническим результатом предлагаемого изобретения является разработка адаптивного цельноповоротного стабилизатора, применение которого позволит снизить потери аэродинамического качества на балансировку при сверхзвуковых скоростях полета, увеличить путевую устойчивость и управляемость самолета в диапазоне от малых дозвуковых до сверхзвуковых режимов полета и обеспечить адаптацию самолета к режимам полета в расширенном диапазоне углов атаки и скольжения.
Решение задачи и технический результат достигаются тем, что в многорежимном сверхзвуковом маневренном самолете, выполненном по нормальной аэродинамической схеме, с цельноповоротным стабилизатором, стабилизатор самолета выполнен адаптивным и установлен на продольной хвостовой балке с возможностью одновременного изменения углов отклонения стабилизатора в двух взаимно-перпендикулярных направлениях:
а) по углу ϕ - относительно оси, перпендикулярной продольной оси самолета, и
б) по углу ψ - относительно оси, параллельной продольной оси самолета.
Известное техническое решение и предлагаемое изобретение поясняются чертежами.
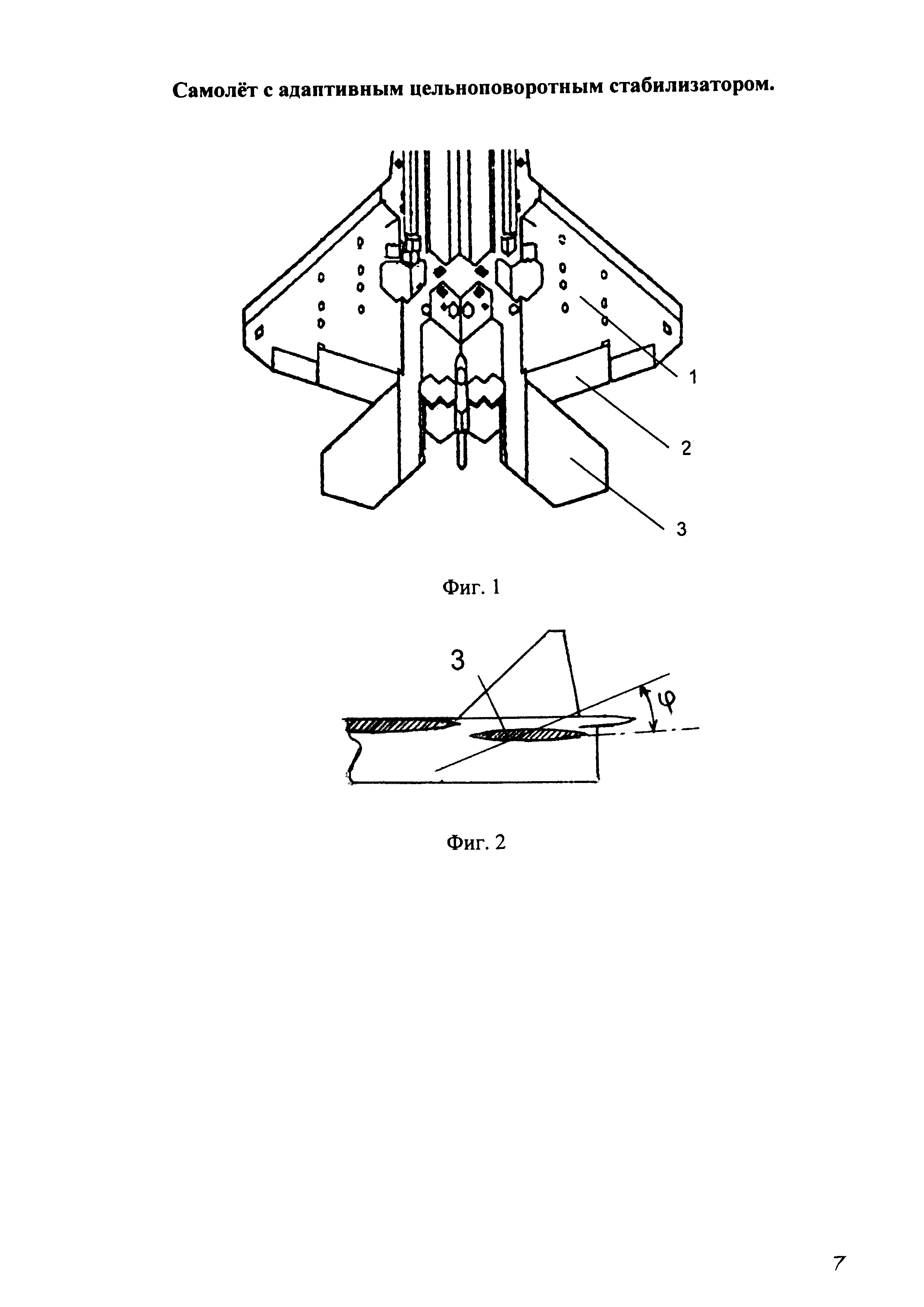
На фиг. 1 приведена схема хвостовой части фюзеляжа самолета-прототипа.
На фиг. 2 - схема отклонения стабилизатора самолета-прототипа по углу ϕ.
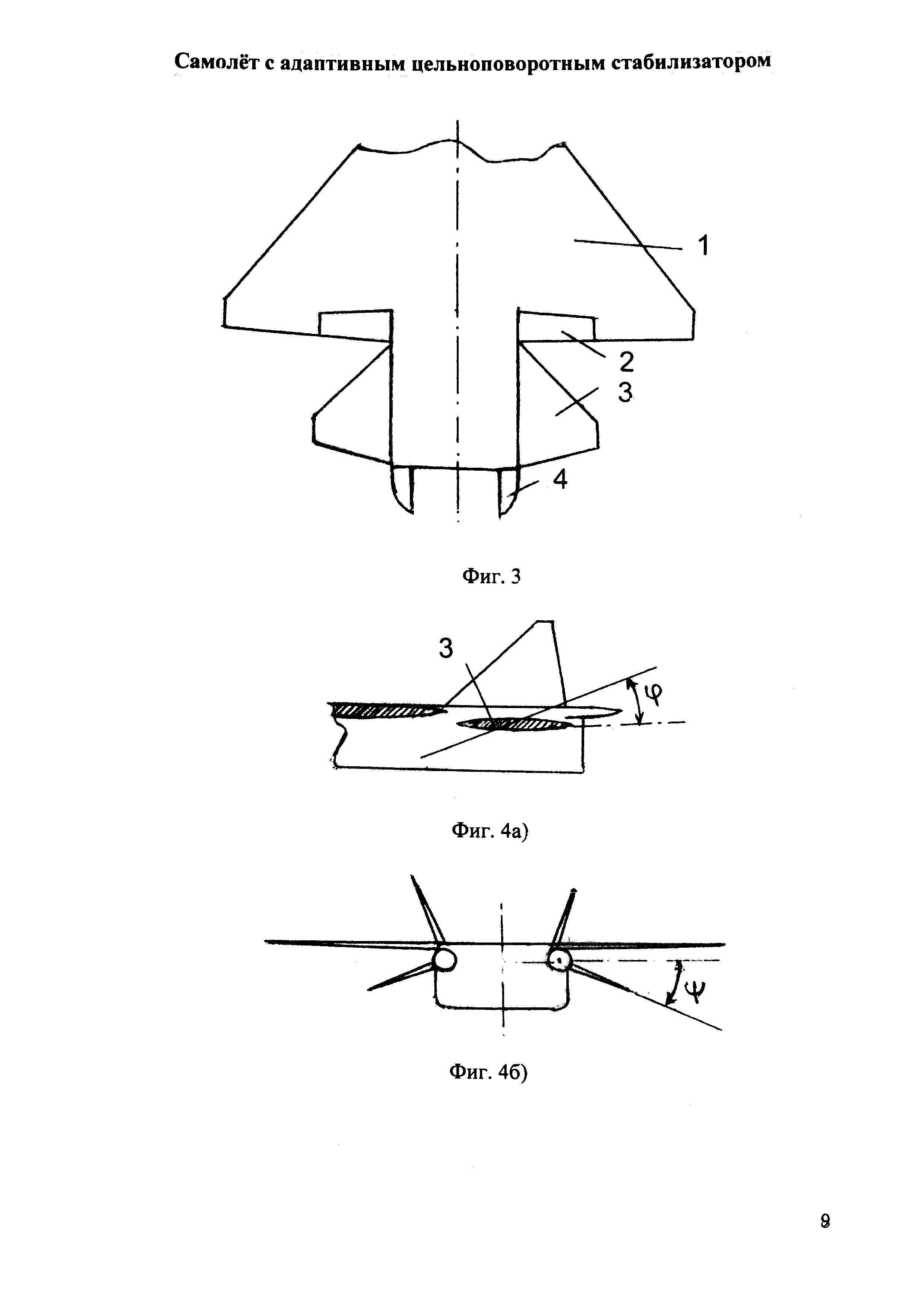
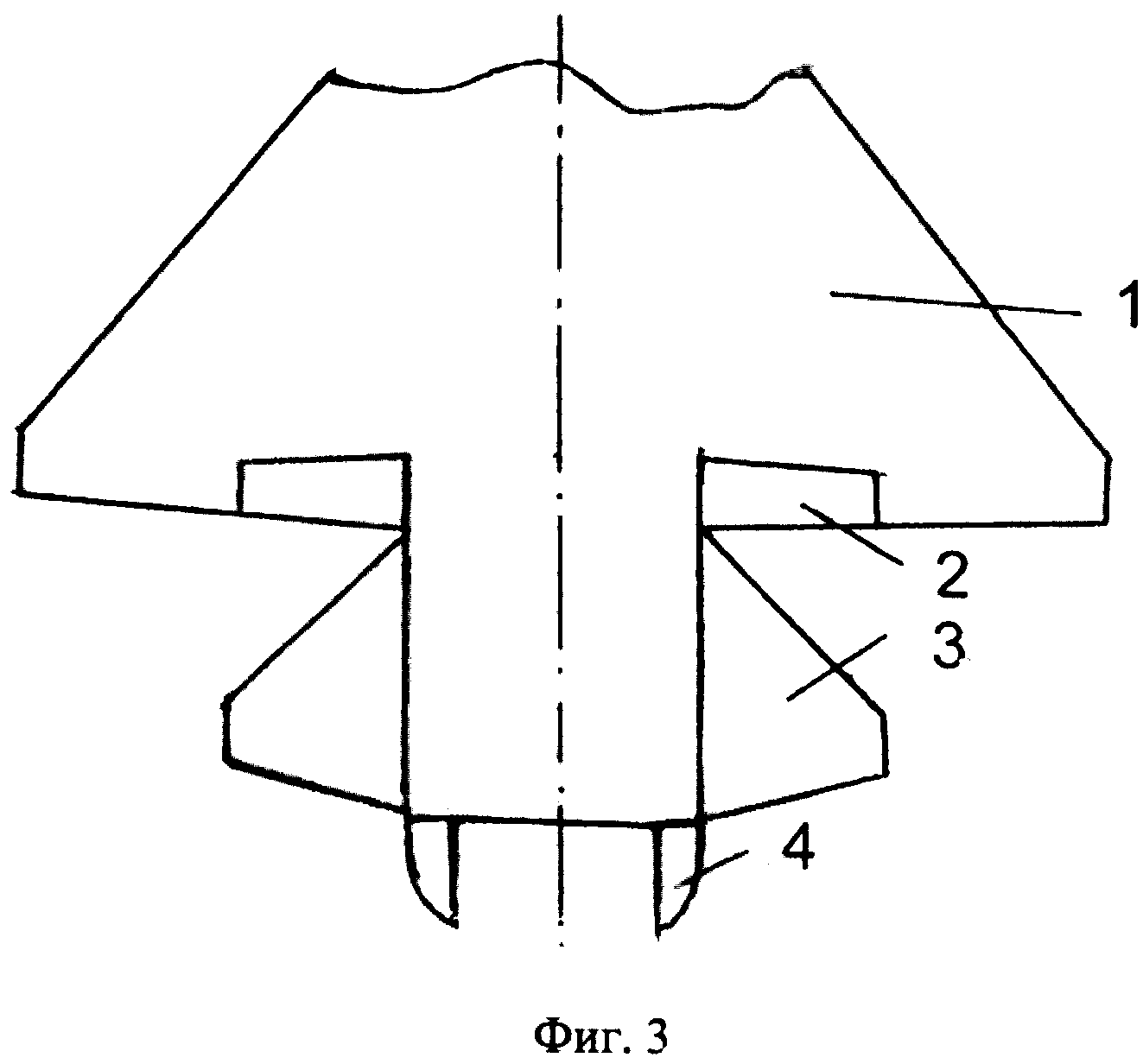
На фиг. 3 - аэродинамическая схема предлагаемого самолета.
На фиг. 4а - схема отклонения адаптивного цельноповоротного стабилизатора предлагаемого самолета по углу ϕ.
На фиг. 4б - схема отклонения адаптивного цельноповоротного стабилизатора предлагаемого самолета по углу ψ.
Аэродинамическая схема хвостовой части фюзеляжа самолета-прототипа приведена на фиг. 1. Перед цельноповоротным стабилизатором 3 на консолях крыла 1 расположены элевоны 2, выполняющие функции взлетно-посадочной механизации и корневых элеронов. Консоли стабилизатора самолета-прототипа имеют одну степень свободы и могут отклоняться только относительно оси, перпендикулярной вертикальной плоскости симметрии самолета по углу ϕ. На виде сбоку показана схема отклонения стабилизатора на угол ϕ (фиг. 2).
На фиг. 3 приведена аэродинамическая схема предлагаемого самолета. Самолет содержит крыло, на его консолях расположены элевоны. 2 Адаптивный цельноповоротный стабилизатор 3 установлен на хвостовой балке 4, которая, кроме отклонения стабилизатора на угол ϕ, дает возможность отклонения стабилизатора относительно продольной оси на угол ψ. На виде сбоку фиг. 4а и сзади фиг. 4б показаны схемы изменения углов отклонения стабилизатора в двух направлениях: на угол ϕ и на угол ψ.
Способ управления адаптивным стабилизатором реализуется следующим образом: в зависимости от режима полета стабилизатор отклоняется на отрицательный угол ψ=0÷-60° (вниз от горизонтальной плоскости самолета). Как показали экспериментальные исследования, в этом диапазоне изменения углов ψ, эффективность стабилизатора в продольном канале (при отклонении по углу ϕ) несколько уменьшается за счет уменьшения площади горизонтальной проекции, но увеличивается за счет выхода стабилизатора из области скосов потока за крылом. При этом в целом эффективность стабилизатора незначительно уменьшается, но сохраняется практически постоянной в большем диапазоне углов атаки. Проекция отклоненного стабилизатора на вертикальную плоскость симметрии самолета увеличивает эффективную площадь вертикального оперения и, соответственно, путевую устойчивость самолета.
Таким образом, применение адаптивного цельноповоротного стабилизатора позволит:
1. Увеличить путевую устойчивость и расширить область полетов маневренных ЛА на взлетно-посадочных режимах (в том числе при боковом ветре), при маневрах на дозвуковых и сверхзвуковых числах М без увеличения площади вертикального оперения или установки подфюзеляжных гребней.
2. Уменьшить смещение аэродинамического фокуса и балансировочные потери, увеличить аэродинамическое качество и дальность полета при трансзвуковых и сверхзвуковых скоростях полета.
3. Увеличить эффективность совместного отклонения корневых элевонов и цельноповоротного стабилизатора при создании управляющих моментов тангажа, крена и рысканья.
Способ газолазерной резки крупногабаритных деталей из композиционных материалов и устройство для его осуществления
Полимерная композиция
Грунтовочная композиция
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Способ получения конъюгата нона-β-(1→3)-глюкозида с бычьим сывороточным альбумином скваратным методом
Износостойкий сплав на основе никеля для нанесения износо- и коррозионно-стойких покрытий на конструкционные элементы микроплазменным или сверхзвуковым газодинамическим напылением
Способ измерения температуры поверхности конструкции резистивным чувствительным элементом, устройство для его осуществления и способ изготовления устройства
Способ определения температурной характеристики резисторного чувствительного элемента, устройство для его осуществления и способ изготовления устройства
Устройство для измерения звукового давления
Устройство для измерения давления, температуры и теплового потока
Способ газолазерной резки крупногабаритных деталей из композиционных материалов и устройство для его осуществления
Полимерная композиция
Грунтовочная композиция
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Способ определения запасов устойчивости рулевого привода и устройство для его осуществления
Способ измерения температуры термопарами, измерительная информационная система для его осуществления и температурный переходник
Способ получения конъюгата нона-β-(1→3)-глюкозида с бычьим сывороточным альбумином скваратным методом
Износостойкий сплав на основе никеля для нанесения износо- и коррозионно-стойких покрытий на конструкционные элементы микроплазменным или сверхзвуковым газодинамическим напылением
Способ измерения температуры поверхности конструкции резистивным чувствительным элементом, устройство для его осуществления и способ изготовления устройства
Способ определения температурной характеристики резисторного чувствительного элемента, устройство для его осуществления и способ изготовления устройства

