Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ВО МНОЖЕСТВЕ СКВАЖИН
Вид РИД
Изобретение
Область техники
[0001] Настоящее изобретение относится к программному обеспечению, компьютерным системам и реализованным на компьютере носителям данных, предназначенным для использования в процессе формирования скважин в подземных формациях, содержащих углеводороды.
Уровень техники
[0002] Скважины, сформированные в подземных пластах-коллекторах углеводородов, обеспечивают добычу части углеводородов при помощи соответствующих технологий добычи. Углеводороды могут накапливаться в пластах-коллекторах, например, вследствие воздействия комбинации капиллярных сил, сил адгезии, сил когезии и гидравлических сил. Метод парогравитационного дренажа (ПГД) представляет собой пример усовершенствованного метода добычи углеводородов, предусматривающего подачу нагретых текучих сред (например, пара) с целью теплового воздействия для упрощения добычи и повышения объема добычи углеводородов, частицы которых сцеплены с формацией. В случае реализации метода парогравитационного дренажа рядом с добывающей скважиной выполняется формирование нагнетательной скважины, и нагретые текучие среды для осуществления теплового воздействия подаются по нагнетательной скважине в формацию, окружающую добывающую скважину. Нагретые текучие среды уменьшают сцепление углеводородов с формацией, способствуя проникновению углеводородов в добывающую скважину.
[0003] В процессе формирования (например, бурения) нагнетательной скважины важное значение имеет информация положения добывающей скважины относительно нагнетательной скважины. Измерение расстояния представляет собой пример способа контроля положения скважины, бурение которой осуществляется, относительно существующей скважины. При использовании способа измерения расстояния источник электромагнитного излучения, расположенный в существующей скважине, передает электромагнитные сигналы, принимаемые датчиками, размещенными в скважине, бурение которой осуществляется. В другом примере реализации способа измерения расстояния как источник электромагнитного излучения, так и датчики могут быть размещены в скважине, бурение которой осуществляется. Некоторые факторы, например, условия бурения скважин могут оказывать неблагоприятное воздействие на возможность обмена электромагнитными сигналами между источником электромагнитного излучения или датчиками (или как источниками, так и датчиками) и, соответственно, могут воздействовать на процесс измерения расстояния в скважинах.
Описание графических материалов
[0004] Фиг. 1A-1D иллюстрируют схематические виды в вертикальном разрезе примеров выполнения измерения расстояния во множестве скважин.
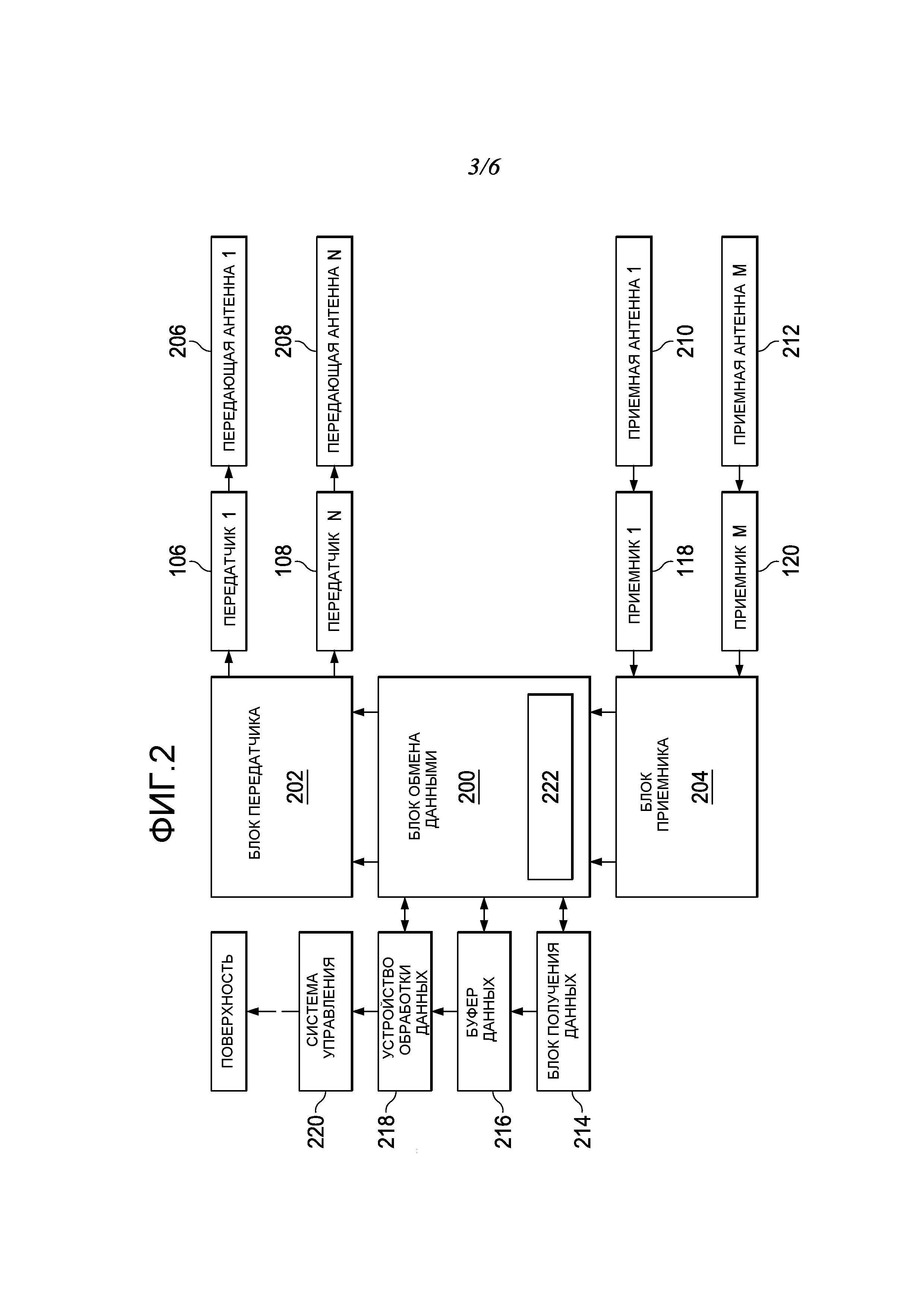
[0005] Фиг. 2 иллюстрирует структурную схему примера системы измерения расстояния в множестве скважин.
[0006] Фиг. 3 иллюстрирует пример рабочей схемы, указывающей взаимосвязь между блоками обработки, компенсации и инвертирования.
[0007] Фиг. 4A и 4B иллюстрируют графики, обеспечивающие возможность сравнения компенсированных и некомпенсированных электромагнитных сигналов.
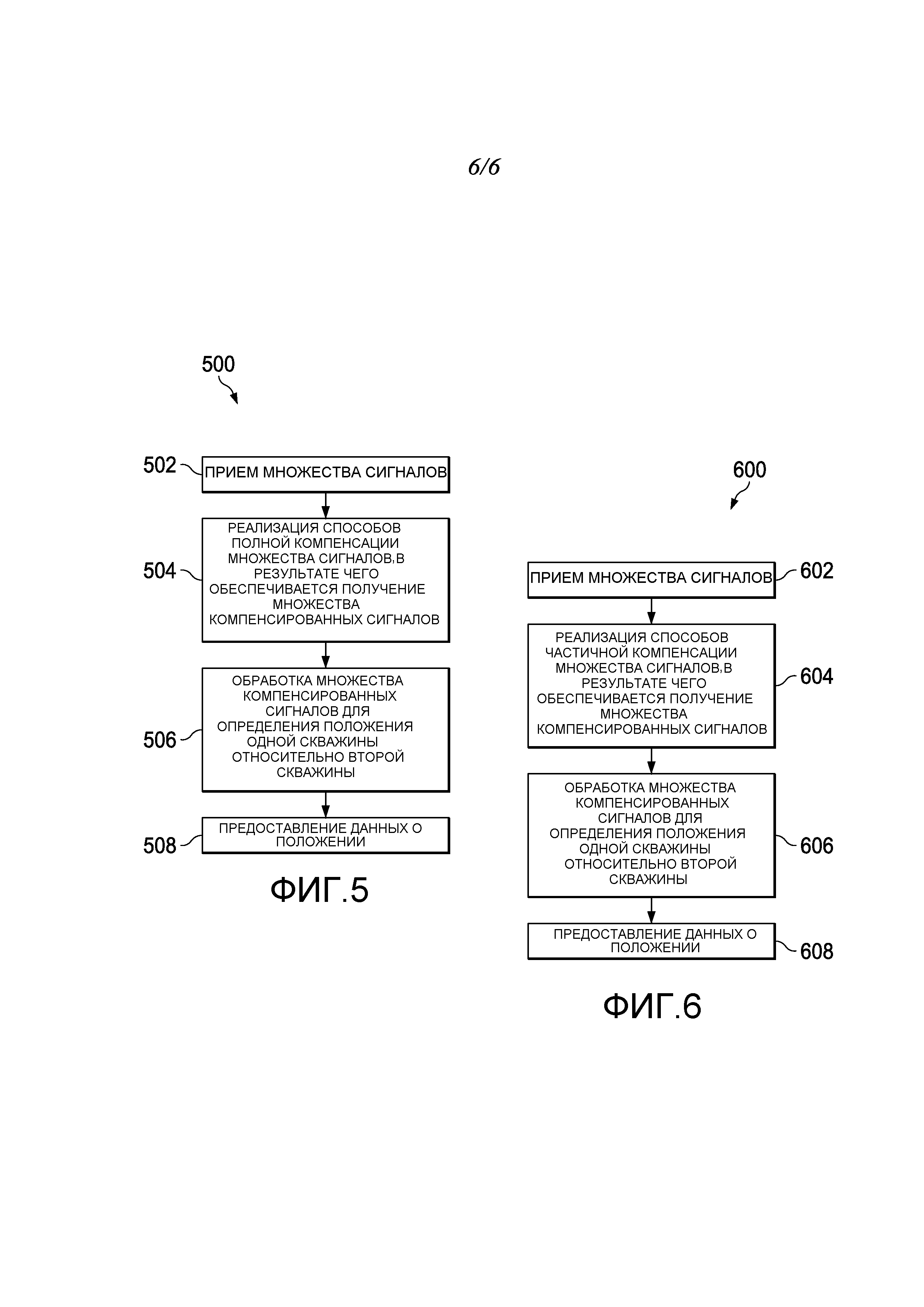
[0008] Фиг. 5 иллюстрирует структурную схему примера способа измерения расстояния в множестве скважин с реализацией полной компенсации.
[0009] Фиг. 6 иллюстрирует структурную схему примера способа измерения расстояния в множестве скважин с реализацией частичной компенсации.
[0010] Одинаковые числовые обозначения на различных чертежах указывают на аналогичные элементы.
Подробное описание изобретения
[0011] Настоящее изобретение относится к реализованным на компьютере способам, компьютерным системам и машиночитаемым носителям данных, предназначенным для измерения расстояния во множестве скважин с использованием компенсированных электромагнитных сигналов. В примере применения метода парогравитационного дренажа важным фактором может быть обеспечение точного измерения расстояния до паронагнетательной скважины. Если нагнетательная скважина пересекается с добывающей скважиной, то в результате разности давлений в скважинах может возникнуть выброс. Если паронагнетательная скважина расположена слишком далеко от добывающей скважины, то нагнетание пара может не обеспечить значительное повышение объема добычи. Способ измерения расстояния, описанный в настоящем документе, можно использовать для измерения расстояния и точного определения положения нагнетательной скважины во время ее бурения.
[0012] Для получения точных данных измерение расстояния осуществляется посредством определения изменения положения передатчиков и приемников электромагнитного излучения. Передатчики и приемники расположены в скважинах и используются для измерения расстояния. Например, передатчики могут быть установлены в добывающей скважине, а приемники - в скважине, бурение которой осуществляется (например, для нагнетания пара). Мощность передатчиков и чувствительность приемников могут быть точно не известны. Параметры передатчиков и приемников могут иметь некоторые различия, связанные с различиями условий изготовления, электронных схем, изменениями температуры или комбинацией указанных факторов. Кроме того, электромагнитный сигнал может изменяться, например, в процессе приближения к целевой скважине. Компенсация представляет собой способ исключения или минимизации эффектов, которые могут оказывать неблагоприятное воздействие на результаты измерений с использованием электромагнитных сигналов. Например, компенсация может быть направлена на исключение или минимизацию влияния элементов (например, различий условий изготовления, различий электронных схем, изменений температуры и аналогичных факторов), чтобы обеспечить, что оставшиеся наблюдаемые или измеряемые различия обусловлены только конкретным способом измерения расстояния.
[0013] Как указано далее, при измерении расстояния во множестве скважин, используемом, например, в усовершенствованном способе добычи углеводородов, может применяться один или два вида компенсации, а именно, частичная компенсация и полная компенсация. Например, в вариантах реализации с полной компенсацией множество передатчиков электромагнитных сигналов и множество приемников электромагнитных сигналов могут быть размещены в добывающей скважине и нагнетательной скважине, соответственно. Например, в вариантах реализации с частичной компенсацией один передатчик электромагнитных сигналов и два приемника электромагнитных сигналов или два передатчика электромагнитных сигналов и один приемник электромагнитных сигналов могут быть размещены в добывающей скважине и нагнетательной скважине, соответственно. Добывающая скважина может представлять собой существующую скважину, а нагнетательная скважина может представлять собой скважину, бурение которой осуществляется вблизи добывающей скважины для нагнетания пара. Компьютерная система, описанная далее, в процессе интерпретации изменений электромагнитных сигналов одного или более передатчиков и одного или более приемников может обеспечивать реализацию любого одного вида или обоих видов компенсации с целью исключения или минимизации некоторых или всех неблагоприятных факторов, указанных выше. Например, посредством реализации операции частичной или полной компенсации компьютерная система может обеспечить исключение или минимизацию любых искажений амплитуды или сдвига фаз, которые могут быть обусловлены дрейфом параметров электронных схем, дрейфом в результате изменения температуры или неизвестной фазой или амплитудой. После реализации компьютерной системой операции частичной или полной компенсации (или обоеих операций) данная компьютерная система может использовать изменения, наблюдаемые в электромагнитном сигнале, в качестве основы для измерения расстояния нагнетательной скважины.
[0014] Реализация операции частичной или полной компенсации (или обеих операций) электромагнитных сигналов перед выполнением измерения расстояния может уменьшить зависимость от других способов коррекции или калибровки, которые являются достаточно сложными или связаны с жесткими требованиями к электронным схемам. В сравнении с другими способами коррекции и калибровки указанный способ компенсации может обеспечить снижение требований к электронным схемам, а также упрощение измерений и повышение надежности результатов измерений. Описанные далее способы компенсации могут обеспечить расширение зоны измерения расстояния. Полученные результаты измерений могут быть более точными и надежными, чем при использовании известных способов компенсации. Указанный способ компенсации может также обеспечить повышение гибкости при разработке электронных схем или механических компонентов (или обоих элементов), используемых при осуществлении усовершенствованных методов добычи углеводородов, таких как метод парогравитационного дренажа. Компенсация может обеспечить коррекцию воздействия температуры, износа или коррозии на электронные схемы датчика, приводящего к дрейфу амплитуды или фазы. Указанная компенсация также может упростить установку датчиков, поскольку калибровка по месту не требуется.
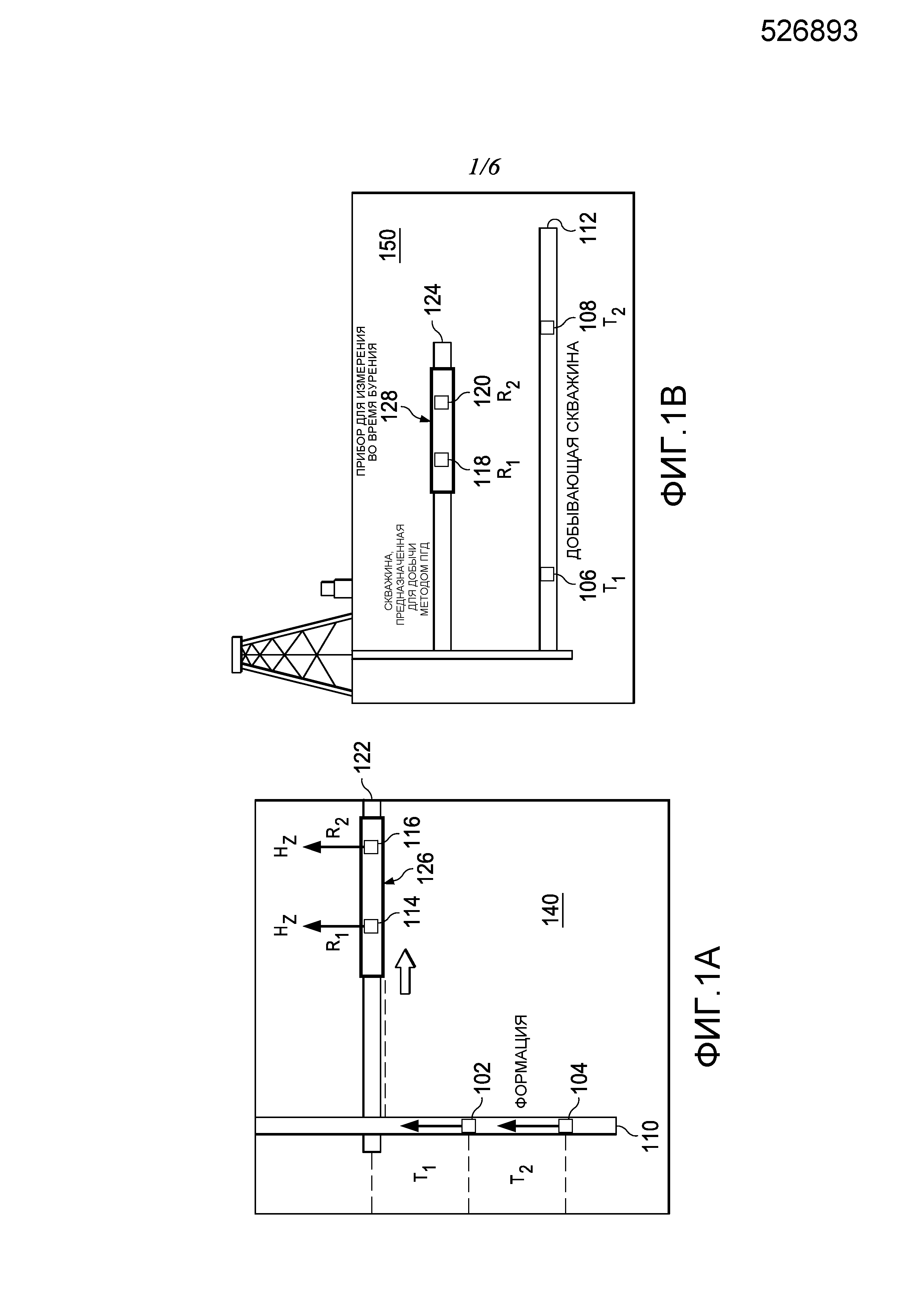
[0015] Фиг. 1A и 1B иллюстрируют схематические виды в вертикальном разрезе примеров выполнения измерения расстояния в множестве скважин с полной компенсацией. В некоторых вариантах реализации множество передатчиков (например, первый передатчик 102, второй передатчик 104) может быть размещено в множестве скважин (например, первой скважине 110, второй скважине 122). Каждый передатчик (то есть, первый передатчик 102, второй передатчик 104) может передавать электромагнитные сигналы. Множество приемников (например, первый приемник 114, второй приемник 116) может быть размещено во множестве скважин. Каждый приемник (то есть, первый приемник 114, второй приемник 116) может принимать электромагнитные сигналы, переданные множеством передатчиков. Например, первый передатчик 102 и второй передатчик 104 могут быть размещены в существующей добывающей скважине 110, и могут быть разнесены на расстояние от 2 футов до 50 футов. Первый приемник 114 и второй приемник 116 могут быть размещены в скважине 122, которая находится в стадии бурения и предназначена для добычи методом парогравитационного дренажа, и могут быть разнесены на расстояние от 2 футов до 50 футов. В общем, для реализации способа полной компенсации по меньшей мере два передатчика и по меньшей мере два приемника могут быть размещены по меньшей мере в двух скважинах.
[0016] В некоторых вариантах реализации первый приемник 114 и второй приемник 116 могут быть прикреплены к прибору 126 для измерения во время бурения (ИВБ), размещенному в скважине 122, предназначенной для реализации метода парогравитационного дренажа. В альтернативном или дополнительном варианте реализации датчики могут быть прикреплены к прибору эксплуатационного каротажа, установлены в специальном корпусе снаружи обсадной трубы, внутри обсадной трубы для передачи и приема сигналов из формации, размещены в необсаженных секциях скважин или может быть использована комбинация указанных методов. В альтернативном или дополнительном варианте реализации датчики могут быть установлены внутри обсадной трубы на приборе для исследования действующих скважин. Обсадная труба может представлять собой все колонны или части одной или более обсадных колонн, размещенных в скважине.
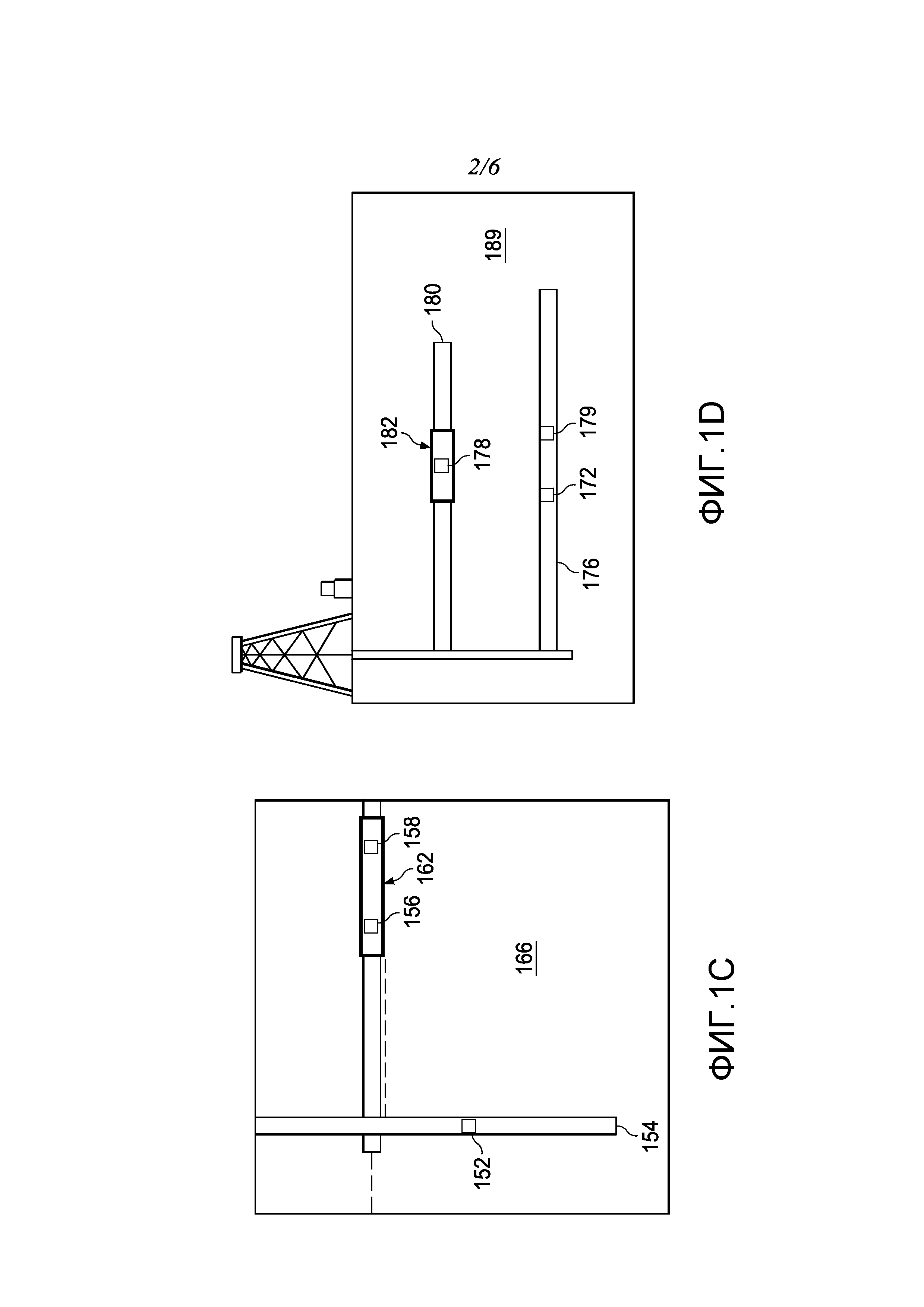
[0017] Фиг. 1C и 1D иллюстрируют схематические виды в вертикальном разрезе примеров выполнения измерения расстояния во множестве скважин с частичной компенсацией. В некоторых вариантах реализации первый передатчик 152 может быть размещен в первой скважине 154 (например, существующей добывающей скважине) с целью передачи электромагнитных сигналов. Первый приемник 156 может быть размещен во второй скважине 180 (например, скважине, предназначенной для реализации метода парогравитационного дренажа) с целью приема электромагнитных сигналов, переданных первым передатчиком. Второй передатчик или второй приемник могут быть размещены в первой скважине или второй скважине для обмена электромагнитными сигналами с первым передатчиком или первым приемником. Например, как проиллюстрировано на фиг. 1C, первый приемник 156 и второй приемник 158 могут быть размещены на приборе 162 для измерения во время бурения во второй скважине 160. В другом примере, как проиллюстрировано на фиг. 1D, первый передатчик 172 и второй передатчик 174 могут быть установлены в существующей добывающей скважине 176 с целью обмена электромагнитными сигналами с приемником 178, размещенным на приборе 182 эксплуатационного каротажа, расположенном в скважине 180, предназначенной для реализации метода парогравитационного дренажа. В общем, по меньшей мере первый передатчик, по меньшей мере первый приемник и второй передатчик или второй приемник могут быть размещены по меньшей мере в двух скважинах с целью реализации частичной компенсации.
[0018] Конфигурация первой скважины в сравнении со второй скважиной (например, расположение скважины 110 относительно скважины 122, расположение скважины 112 относительно скважины 124, расположение скважины 154 относительно скважины 160 или расположение скважины 176 относительно скважины 180) и расположение передатчиков и приемников в первой скважине и второй скважине являются только примерами реализации. Возможно использование нескольких других конфигураций. Например, как в варианте с частичной, так и полной компенсацией более двух передатчиков и более двух приемников могут быть размещены во второй скважине 122 и первой скважине 110, соответственно. В данном случае компенсация может осуществляться при помощи четырех компонентов. Передатчик и приемник могут быть размещены в одной скважине как в варианте с частичной, так и с полной компенсацией. Первая скважина проходит, по существу, перпендикулярно второй скважине, например, в формации 140 (фиг. 1A) или в формации 166 (фиг. 1C). В альтернативном варианте, как показано в формации 150 (фиг. 1B) или в формации 184 (фиг. 1D), третья скважина может проходить, по существу, параллельно четвертой скважине.
[0019] Одна из двух скважин может представлять собой добывающую скважину, в которой размещены один или более передатчиков. Вторая скважина может представлять собой нагнетательную скважину, в которой размещен прибор (например, прибор 128 для измерения во время бурения). В варианте реализации с полной компенсацией множество приемников (например, третий приемник 118 и четвертый приемник 120) может быть размещено в четвертой скважине 124, например, прикреплено к прибору 128 для измерения во время бурения. В варианте реализации с частичной компенсацией один передатчик 178 может быть прикреплен к прибору (например, прибору 182 эксплуатационного каротажа) в скважине 180. В некоторых вариантах реализации скважины, сформированные в формации, могут быть расположены под любым углом друг к другу, а не проходить, по существу, параллельно или, по существу, перпендикулярно. Передатчики и приемники могут быть попеременно размещены в любой скважине. В общем, способы, описанные в настоящем документе, могут быть реализованы при определении расстояния между скважинами любой конфигурации посредством размещения датчиков (то есть, передатчиков и приемников) в любой из двух скважин.
[0020] В некоторых вариантах реализации с полной компенсацией первый передатчик 102, первый приемник 114 и второй приемник 116 могут быть размещены в первой скважине 110 и второй скважине 122 (фиг. 1A) таким образом, что угол, образованный первой линией, соединяющей первый приемник 114 с первым передатчиком 102, и второй линией, соединяющей второй приемник 116 и первый передатчик 106, соответствует пороговому углу, который в некоторых вариантах реализации может составлять по меньшей мере 5 градусов. Аналогичным образом, третий передатчик 106, третий приемник 118 и четвертый приемник 120 могут быть размещены в третьей скважине 112 и четвертой скважине 124 таким образом, что угол, образованный линией, соединяющей третий приемник 118 с третьим передатчиком 106, и линией, соединяющей четвертый приемник 120 и третий передатчик 106, соответствует пороговому углу. В некоторых вариантах реализации, например, при формировании одной из скважин с учетом другой существующей скважины положения передатчиков и приемников во множестве скважин могут периодически изменяться таким образом, что сохраняется указанный выше угол, соответствующий пороговому углу. Зона действия системы измерения может иметь трапецеидальную форму, образованную в каждом случае использованием двух передатчиков и двух приемников. Для увеличения зоны действия можно использовать более двух передатчиков и более двух приемников.
[0021] Фиг. 2 иллюстрирует структурную схему примера системы 200 управления, предназначенной для измерения расстояния во множестве скважин, которая может выполнить частичную компенсацию или полную компенсацию либо обе операции компенсации. Система 200 управления может быть реализована на основе компьютерной системы (например, настольного компьютера, переносного компьютера, планшетного компьютера, карманного персонального компьютера, смартфона и аналогичных устройств), выполняющей машинные команды, записанные на машиночитаемом носителе 222 данных, с целью осуществления операций, описанных в настоящем документе. Система 200 управления может быть соединена с блоком 202 передатчика и блоком 204 приемника. Каждый из блоков 202 передатчика и блоков 204 приемника может быть реализован в виде машинных команд, записанных на машиночитаемом носителе 222 данных и выполняемых при получении команд от системы 200 управления. Блок 202 передатчика может быть соединен с множеством передатчиков (например, передатчиком 106, передатчиком 108), размещенных в скважинах. Блок 204 приемника может быть соединен с множеством приемников (например, приемником 114, приемником 116), размещенных в скважинах.
[0022] Каждый передатчик может быть подключен (или может содержать) к соответствующей передающей антенне (например, передающей антенне 206, подключенной к передатчику 106, передающей антенне 208, подключенной к передатчику 108, другим передающим антеннам, подключенным к соответствующим передатчикам). Аналогичным образом, каждый приемник может быть подключен (или может содержать) к соответствующей приемной антенне (например, приемной антенне 210, подключенной к приемнику 118, приемной антенне 212, подключенной к приемнику 120, другим приемным антеннам, подключенным к соответствующим приемникам). В некоторых вариантах реализации (включая варианты с частичной компенсацией и полной компенсацией) система 200 управления может обеспечить передачу электромагнитных сигналов в окружающую формацию одной или более передающими антеннами, например, при помощи блока 202 передатчика. Система 200 управления может обеспечить прием одной или более приемными антеннами электромагнитных сигналов, переданных множеством передающих антенн, например, при помощи блока 204 приемника. На электромагнитные сигналы, поступающие на приемные антенны, влияют характеристики формации, в которой размещены передатчики и приемники. Электромагнитные сигналы, излучаемые передающими антеннами, могут быть одночастотными или широкополосными сигналами. При использовании широкополосных сигналов приемники могут регистрировать сигналы во временной области и рассчитывать соответствующие сигналы в частотной области при помощи преобразования Фурье.
[0023] Система 200 управления, подключенная к множеству передатчиков и множеству приемников, может принимать множество сигналов, каждый из которых является сигналом или представляет каждый сигнал, полученный каждым передатчиком от каждого приемника. Например, система 200 управления может принимать каждый сигнал в форме комплексного напряжения. Система 200 управления может осуществлять хранение множества сигналов на машиночитаемом носителе данных (например, машиночитаемом носителе 222 данных). Система 200 управления может реализовать операции частичной компенсации или полной компенсации (описанные ниже) множества сигналов, в результате чего осуществляется получение множества компенсированных сигналов. Система 200 управления может осуществлять хранение множества компенсированных сигналов на машиночитаемом носителе данных. Система 200 управления может выполнять обработку множества компенсированных сигналов для определения положения первой скважины (например, скважины 110) относительно второй скважины (например, скважины 122), и направлять информацию положения, например, на устройство отображения (не показано), подключенное к системе 200 управления.
[0024] В вариантах реализации с полной компенсацией система 200 управления может осуществить операцию компенсации на основе использования электромагнитных сигналов, переданных по меньшей мере двумя передатчиками и принятых по меньшей мере двумя приемниками. С этой целью система 200 управления может обеспечить определение множества компенсированных сигналов на основе сигналов, переданных между по меньшей мере двумя передатчиками и по меньшей мере двумя приемниками. Система 200 управления может определить по меньшей мере один компенсированный сигнал на основе первого сигнала, полученного из первой скважины, и второго сигнала, полученного из второй скважины. Каждый из передатчиков и приемников обеспечивает измерение как амплитуды, так и фазы сигнала. Система 200 управления может выполнить измерение величины каждого электромагнитного сигнала, то есть, измерить амплитуду и фазу каждого электромагнитного сигнала, например, посредством преобразования сигнала в цифровую форму. В примере конфигурации, проиллюстрированной на фиг. 1B, система 200 управления может получить четыре результата измерений от двух передатчиков, размещенных в добывающей скважине, и двух приемников, размещенных в нагнетательной скважине, на основе сигналов, переданных от передатчика 106 к приемнику 118, от передатчика 106 к приемнику 120, от передатчика 108 к приемнику 118 и от передатчика 108 к приемнику 128. Система 200 управления может принимать результаты измерений в виде комплексных значений напряжения, каждое из которых имеет определенную амплитуду и определенную фазу.
[0025] На основании этих результатов измерений система 200 управления может получить значение R, которое представляет собой отношение сигналов. Например, в первый момент времени система 200 управления может определить первое произведение значения первого сигнала, переданного передатчиком 106 приемнику 118 (T1R1), и значения второго сигнала, переданного передатчиком 108 приемнику 120 (T2R2). В первый момент времени система 200 управления может также определить второе произведение значения третьего сигнала, переданного передатчиком 106 приемнику 120 (T1R2), и значения четвертого сигнала, переданного передатчиком 108 приемнику 118 (T2R1). Система 200 управления может разделить первое произведение на второе произведение, в результате чего получается первый компенсированный сигнал. В процессе измерения расстояния значение R, указывающее характеристики формации, изменяется во времени.
[0026] Компенсированный сигнал обеспечивает устранение мультипликативных искажений, обусловленных передатчиками или приемниками и представленных в виде  , где V’ - напряжение, подверженное воздействию мультипликативных искажений, обусловленных передатчиком X (CTX), и V представляет собой идеальный результат измерений при отсутствии искажений. При определении системой 200 управления четырехэлементного отношения сигналов, описанного выше, мультипликативные искажения устраняются, как указано ниже:
, где V’ - напряжение, подверженное воздействию мультипликативных искажений, обусловленных передатчиком X (CTX), и V представляет собой идеальный результат измерений при отсутствии искажений. При определении системой 200 управления четырехэлементного отношения сигналов, описанного выше, мультипликативные искажения устраняются, как указано ниже:
 .
.
[0027] Аналогично операциям, выполняемым в первый момент времени, во второй момент времени система 200 управления может определить третье произведение значения пятого сигнала, переданного передатчиком 106 и принятого приемником 118, и значения шестого сигнала, переданного передатчиком 108 и принятого приемником 120. Во второй момент времени система 200 управление может определить четвертое произведение значения седьмого сигнала, переданного передатчиком 106 и принятого приемником 120, и значения восьмого сигнала, переданного передатчиком 108 и принятого приемником 118. Система 200 управления может разделить третье произведение на четвертое произведение, в результате чего получается второй компенсированный сигнал. Таким образом, система 200 управления может осуществлять получение результатов измерений через определенный интервал времени, например, интервал между первым моментом времени и вторым моментом времени.
[0028] Между первым моментом времени и вторым моментом времени множество передатчиков и множество приемников могут оставаться на месте. В альтернативном варианте между первым моментом времени и вторым моментом времени множество передатчиков или множество приемников (или передатчики и приемники) могут перемещаться. Решение о перемещении передатчиков или приемников (или передатчиков и приемников) или сохранении неизменным положения передатчиков или приемников (или передатчиков и приемников) может зависеть от длины участка скважины (например, нагнетательной скважины), который был пробурен между первым моментом времени и вторым моментом времени. Например, если множество приемников закреплено на приборе для измерения во время бурения, который перемещается по мере бурения скважины, то множество приемников может перемещаться между первым моментом времени и вторым моментом времени. Если (указанный выше) угол, образованный линиями, проведенными между множеством приемником и определенным передатчиком, после перемещения прибора для измерения во время бурения перестает соответствовать пороговому углу, то передатчики также могут быть перемещены.
[0029] В некоторых вариантах реализации в момент времени, когда система 200 управления обеспечивает передачу электромагнитных сигналов передатчиками и прием электромагнитных сигналов приемниками, приемники и передатчики могут оставаться неподвижными. В альтернативном варианте реализации один или более передатчиков или один или более приемников (или приемники и передатчики) могут перемещаться во время передачи и приема электромагнитных сигналов. Таким образом, система 200 управления может получать множество сигналов из множества первых положений передатчиков и приемников и множество сигналов из множества вторых положений, в которые множество передатчиков и множество приемников перемещены в скважинах.
[0030] Система 200 управления регистрирует компенсированный сигнал в функции от времени. В общем, функция f может быть использована перед вычитанием, как указано ниже:
 .
.
[0031] В вариантах реализации с частичной компенсацией система 200 управления может осуществить операцию компенсации на основе использования электромагнитных сигналов, переданных между по меньшей мере одним передатчиком, по меньшей мере одним приемником и передатчиком или приемником. В вариантах реализации, предусматривающих использование двух передатчиков и одного приемника, возможно выполнение двух измерений - с передачей сигнала от передатчика 172 к приемнику 178 (T1R1) и от передатчика 174 к приемнику 178 (T2R1). В вариантах реализации, предусматривающих применение двух приемников и одного передатчика, возможно выполнение двух измерений – с передачей сигнала от передатчика 152 к приемнику 156 (T1R1) и от передатчика 152 к приемнику 158 (T1R2). Система 200 управления может получать электромагнитные сигналы в форме значений комплексного напряжения, каждое из которых имеет соответствующую амплитуду и фазу. В примере, предусматривающем использование двух передатчиков и одного приемника, для определения значения (отношения) R система 200 управления может выполнить деление значения (то есть, значения напряжения) первого сигнала, переданного передатчиком 172 приемнику 178 (T1R1), на значение второго сигнала, переданного передатчиком 174 приемнику 178 (T2R1). При определении системой 200 управления двухэлементного отношения сигналов мультипликативные искажения устраняются, как указано ниже, в результате чего получается первый компенсированный сигнал:
 .
.
[0032] Система 200 управления может выполнить описанную выше частичную компенсацию в первый момент времени. Во второй момент времени система 200 управления может выполнить деление значения третьего сигнала, переданного передатчиком 172 приемнику 178, на значение четвертого сигнала, переданного передатчиком 174 приемнику 178. Система 200 управления может выполнить деление значения третьего сигнала на значение четвертого сигнала, в результате чего получается второй компенсированный сигнал. В процессе измерения расстояния значение R, указывающее характеристики формации, изменяется во времени. В частично компенсированном сигнале обеспечивается устранение мультипликативных искажений, обусловленных любым передатчиком, которые представлены в следующем виде:
 .
.
[0033] В указанном выше уравнении V’ - напряжение, содержащее составляющую мультипликативных искажений, обусловленных передатчиком X (CTX), а V - идеальный результат измерения при отсутствии искажений.
[0034] Аналогичным образом, в примере, предусматривающем использование двух приемников и одного передатчика, для определения значения (отношения) R система 200 управления может выполнить деление первого сигнала, переданного передатчиком 152 приемнику 156 (T1R1), на значение второго сигнала, переданного передатчиком 152 приемнику 158 (T1R2). В результате определения системой 200 управления двухэлементного отношения сигналов, мультипликативные искажения устраняются, как указано ниже:
 .
.
[0035] Система 200 управления может выполнить описанную выше частичную компенсацию в первый момент времени. Во второй момент времени система 200 управления может выполнить деление значения третьего сигнала, переданного передатчиком 152 приемнику 156, на значение четвертого сигнала, переданного передатчиком 152 приемнику 158. Аналогично случаю полной компенсации сигнал, принятый в режиме частичной компенсации, может быть зарегистрирован как функция времени и разность во времени может быть использована для получения результатов измерений через интервал времени
 .
.
[0036] В этом уравнении значение R может быть некомпенсированным, частично компенсированным или полностью компенсированным в зависимости от способа компенсации, реализованного системой 200 управления. Одним из примеров функции f является тождество, то есть, f(x) = x. Другой пример функции f представляет собой логарифмическую функцию, при использовании которой S указывает изменение логарифма уровней сигнала между первым моментом времени (то есть, t1) и вторым моментом времени (то есть, t2). Возможно также использование других примеров функции f. Далее, в некоторых вариантах реализации система 200 управления может выполнить определение второй разности результатов измерений, полученных в три момента времени.
[0037] В некоторых вариантах реализации система 200 управления может быть подключена к блоку 214 получения данных для приема сигналов, подаваемых на систему 200 управления от блока 204 приемника. В качестве альтернативного варианте или дополнительно к хранению сигналов на машиночитаемом носителе 222 данных, сигналы могут сохраняться в буфере 216 данных, связанном с системой 200 управления и блоком 214 получения данных. Процессор (например, устройство 218 обработки данных) может быть реализован как компонент системы 200 управления или находиться за пределами системы 200 управления (или функционировать на основе использования обоих вариантов). Для передачи данных о положении первой скважины относительно второй скважины, например, на устройство отображения, находящееся на поверхности, система 200 управления может быть подключена к блоку 220 обмена данными, который может передавать данные с использованием проводных или беспроводных сетей (или обоих типов сетей). Например, блок 220 обмена данными может быть реализован в виде телеметрической системы.
[0038] В примере осуществления операций, описанном со ссылкой на систему 200 управления, способ компенсации реализован на основе осуществления компьютерных операций. В альтернативном или дополнительном варианте способ компенсации может быть реализован с использованием аппаратного обеспечения или встроенного программного обеспечения. Например, отношения, используемые в процессе реализации способа компенсации, могут быть рассчитаны аппаратными средствами посредством измерения разности фаз и ослабления сигналов приемников вместо (или в дополнение) измерения абсолютных значений сигналов. К компенсированному сигналу также может быть применена дополнительная обработка с учетом истекшего времени. Система 200 управления может быть реализована в скважине или на поверхности.
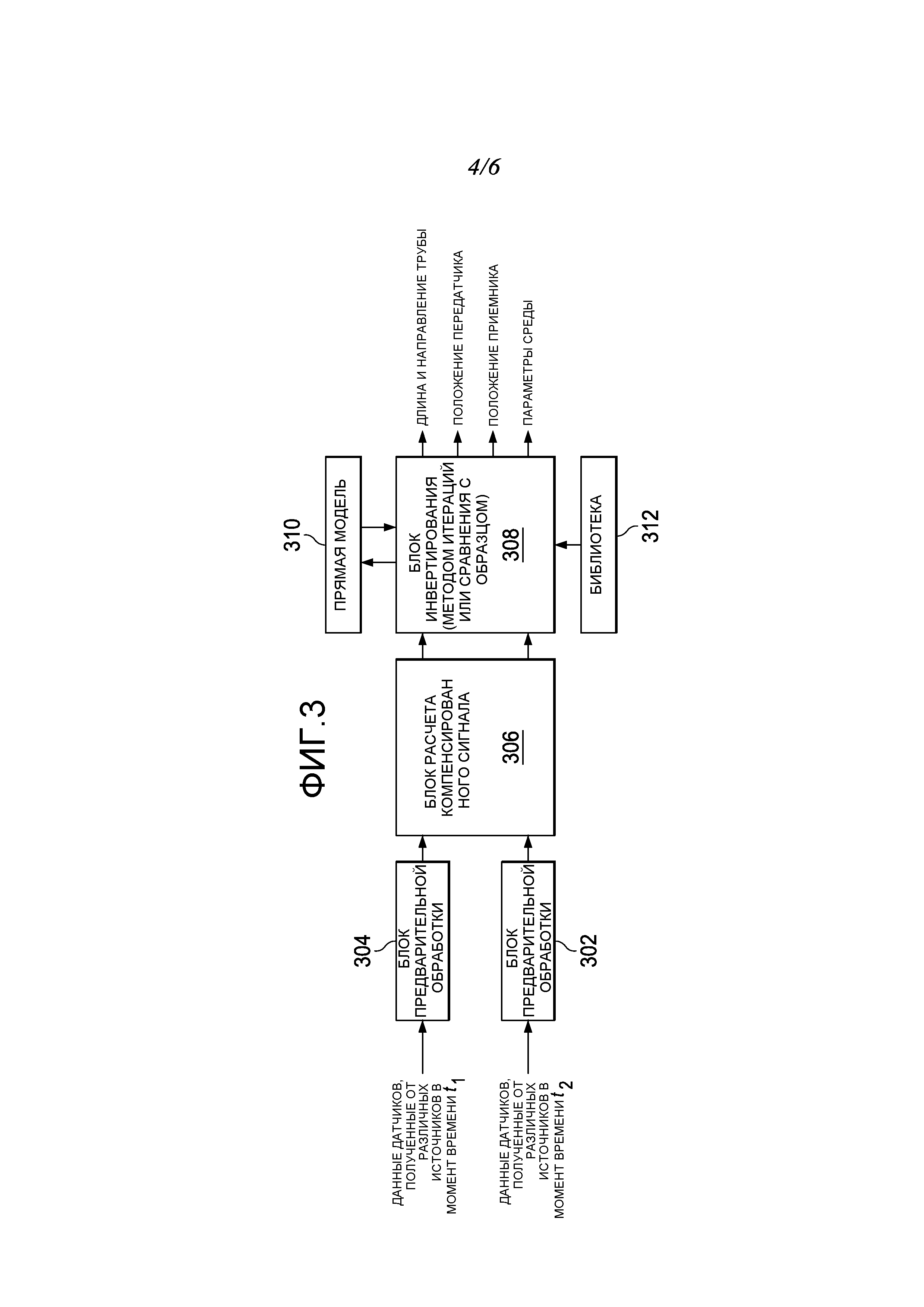
[0039] Фиг. 3 иллюстрирует пример блока предварительной обработки, предназначенного для предварительной обработки электромагнитных сигналов перед частичной компенсацией или полной компенсацией. Как проиллюстрировано на фиг. 3, система 200 управления может содержать множество компонентов, предназначенных для выполнения предварительной обработки, каждый из которых может быть реализован в форме машиночитаемого носителя данных, осуществляющего хранение команд, выполняемых процессором (например, устройством 218 обработки данных). В некоторых вариантах реализации перед выполнением компенсации система 200 управления может осуществить предварительную обработку множества сигналов, полученных от одного или более передатчиков. Например, первый блок 304 предварительной обработки может получать данные датчиков от множества источников (то есть, передатчиков) в момент t1 времени, то есть первый момент времени. Второй блок 302 предварительной обработки может получать данные датчиков от множества источников (то есть, передатчиков) в момент t2 времени, то есть второй момент времени. В некоторых вариантах реализации блок 306 расчета компенсированного сигнала может реализовать методы обработки сигнала электрокаротажа, например, многокомпонентный синтез, синтез разностных сигналов, получение виртуальных матриц по данным глубины с задержкой во времени или их комбинации. Предварительная обработка может охватывать фильтрацию по времени или глубине с целью повышения отношения сигнал-шум. Предварительная обработка может дополнительно предусматривать синтез множества матриц посредством комбинирования информации, полученной от датчиков, размещенных в различных положениях. Предварительная обработка может также включать азимутальное бинирование и обработку множества бинов с целью получения тензоров диполей, используемых при осуществлении измерений во время бурения методом индукционного электрического каротажа. Предварительная обработка может также включать операцию калибровки с использованием предшествующих результатов измерений или прогнозируемого положения (или обоих факторов) системы перемещения датчиков либо условий окружающей среды.
[0040] В альтернативном или дополнительном варианте система 200 управления может содержать блок 308 инвертирования на основе компенсированного сигнала с использованием прямого моделирования (например, с использованием прямой модели 310) и обратной связи (например, с использованием библиотеки 312). На входы блоков инвертирования поступают компенсированные сигналы, а с выходов подаются параметры труб или среды, такие как длина и направление трубы, положение передатчика, положение приемника, параметры среды и аналогичные величины. На основании разности входных сигналов и результата моделирования набор переменных выходных параметров может быть скорректирован с целью уменьшения разности. Операции, описанные выше, могут повторяться в соответствии с методом итераций и прекращаться после достижением разностью сигналов определенного порога. В альтернативном или дополнительном варианте может быть рассчитана и использована таблица подстановки, содержащая входные и выходные параметры. Параметры, в том числе длина и направление трубы, положение передатчика, размеры скважины и другие параметры среды могут быть получены в процессе предварительной обработки.
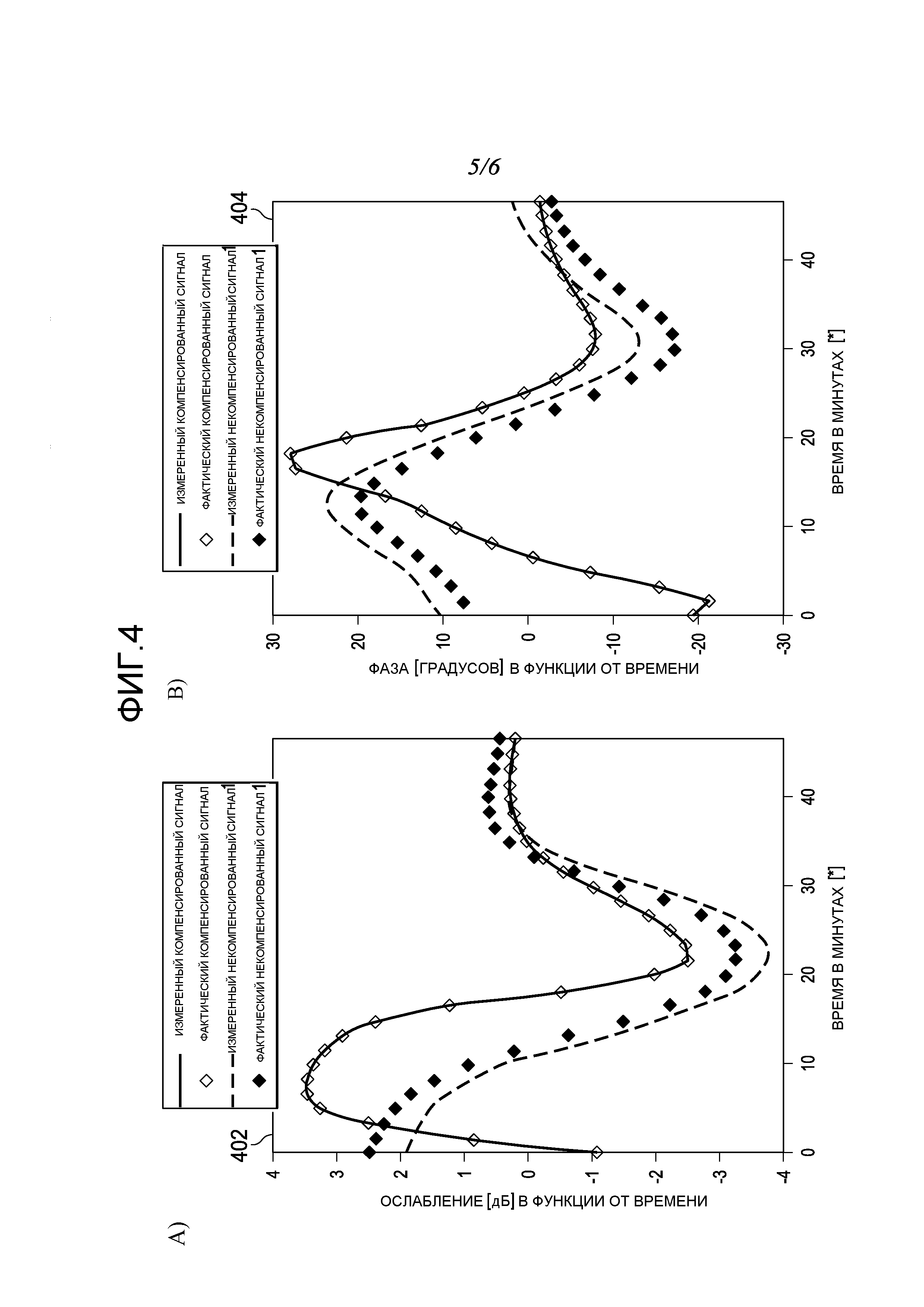
[0041] Фиг. 4A и 4B иллюстрируют графики, обеспечивающие возможность сравнения компенсированных и некомпенсированных электромагнитных сигналов. Электромагнитные сигналы, принятые приемниками, используются для определения расстояния между двумя скважинами, в которых размещены передатчики и приемники. При измерении сигнала с использованием данных одного момента времени высокая амплитуда сигнала может указывать, что скважины находятся близко друг к другу, а низкая амплитуда сигнала может означать, что скважины находятся на значительном расстоянии. В случае измерения сигналов с использованием данных, полученных через некоторый интервал времени, высокая амплитуда сигнала может указывать, что скважины приближаются друг к другу, а низкая амплитуда сигнала может означать, что расстояние между скважинами увеличивается. Процесс инвертирования, описанный выше, может использоваться для определения расстояния между скважинами по компенсированным сигналам. Графики, проиллюстрированные на фиг. 4A и 4B, получены посредством измерения расстояния при использовании метода парогравитационного дренажа. График 402 представляет собой значение ослабления в функции от времени для измеренных компенсированных сигналов, фактических компенсированных сигналов, измеренных некомпенсированных сигналов и фактических некомпенсированных сигналов. График 404 представляет собой значение фазы в функции от времени для измеренных компенсированных сигналов, фактических компенсированных сигналов, измеренных некомпенсированных сигналов и фактических некомпенсированных сигналов. Полученный сигнал используется для определения положения приемников или эквивалентного положение корпуса прибора относительно опорного значения, такого как положение нагнетательной или добывающей скважин или ранее определенного положения приемника. Хотя в данном примере осуществляется перемещение приемника, в альтернативном или дополнительном варианте реализации может перемещаться передатчик. В данном примере осуществляется контроль дрейфа амплитуды и дрейфа фазы всех приемников. Несмотря на эскизный характер графиков, данные показывают, что дрейф фазы не воздействует на результаты измерений компенсированного сигнала, но воздействует на результаты измерений некомпенсированных сигналов.
[0042] Фиг. 5 иллюстрирует структурную схему примера реализации способа 500 измерения расстояния в множестве скважин, предусматривающего выполнение полной компенсации. Способ 500 может быть реализован на основе машинных команд, записанных на машиночитаемом носителе данных (например, машиночитаемом носителе 222 данных) и выполняемых процессором (например, устройством 218 обработки данных). Например, способ 500 может быть реализован системой 200 управления. На этапе 502 осуществляется прием множества сигналов. Каждый сигнал соответствует электромагнитному сигналу, принятому одним из множества приемников, размещенных в множестве скважин, от одного из множества передатчиков, размещенных в множестве скважин.
[0043] На этапе 504 выполняется реализация способов полной компенсации множества сигналов, в результате чего обеспечивается получение множества компенсированных сигналов. Например, множество компенсированных сигналов может быть определено на основе множества принятых сигналов. По меньшей мере один компенсированный сигнал может быть определен на основе первого сигнала, принятого из первой скважины, и второго сигнала, принятого из второй скважины множества скважин. На этапе 506 выполняется обработка множества компенсированных сигналов для определения положения первой скважины множества скважин относительно второй скважины множества скважин. На этапе 508 предоставляются данные положения первой скважины относительно второй скважины.
[0044] Фиг. 6 иллюстрирует структурную схему примера способа 600 измерения расстояния в множестве скважин, предусматривающего выполнение частичной компенсации. Способ 600 может быть реализован на основе машинных команд, записанных на машиночитаемом носителе данных (например, машиночитаемом носителе 222 данных) и выполняемых процессором (например, устройством 218 обработки данных). Например, способ 500 может быть реализован системой 200 управления. На этапе 602 осуществляется прием множества сигналов. Каждый сигнал соответствует электромагнитному сигналу, передаваемому между первым передатчиком, размещенным в первой скважине с целью передачи электромагнитных сигналов, первым приемником, размещенным во второй скважине с целью приема электромагнитных сигналов, переданных первым передатчиком, и вторым передатчиком или вторым приемником. Второй передатчик или второй приемник могут быть размещены в первой скважине или во второй скважине или за пределами скважины (например, на поверхности).
[0045] На этапе 604 выполняется реализация способов частичной компенсации множества сигналов, в результате чего обеспечивается получение множества компенсированных сигналов. На этапе 606 выполняется обработка множества компенсированных сигналов для определения положения первой скважины множества скважин относительно второй скважины множества скважин. На этапе 608 предоставляются данные положения первой скважины относительно второй скважины.
[0046] В настоящем документе представлено описание ряда вариантов реализации изобретения. Тем не менее, очевидно, что различные модификации могут быть внесены без выхода за пределы сущности и объема настоящего изобретения.
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости
Улучшенные изолирующие жидкости на водной основе и связанные с ними способы
Способы использования добавок, содержащих микрогели, для контроля потери текучей среды
Стабилизирующие эмульсию агенты для применения в текучих средах для бурения и заканчивания скважин
Способ использования вязкоупругих поверхностно-активных веществ
Застывающие композиции, содержащие природный пуццолан, и связанные с этим способы
Управление маршрутом прохождения потока текучей среды на основе ее характеристик для регулирования сопротивления потоку в подземной скважине
Модифицированные бентониты для современных литейных приложений
Улучшенные способы размещения и отклонения текучих сред в подземных пластах
Оценивание поверхностных данных
Системы и способы каротажа азимутальной хрупкости

