Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ И СИСТЕМА ДВИГАТЕЛЯ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Настоящее изобретение относится к системе для усовершенствования автоматической остановки и запуска двигателя. Способ может быть, в частности, полезен для повышения экономии топлива транспортного средства и улучшения режима езды.
Уровень техники
В целях экономии топлива двигатель может быть автоматически остановлен. Контроллер может принять решение об остановке двигателя на основании комбинации контролируемых условий работы транспортного средства. Например, двигатель может быть остановлен в ситуации, когда скорость транспортного средства равна нулю, а водитель нажимает на педаль тормоза транспортного средства. Остановка двигателя при подобных условиях может позволить сэкономить топливо. Однако водитель также может отпустить педаль тормоза транспортного средства сразу после остановки двигателя, так что топливо практически не будет сэкономлено. Кроме того, кратковременная остановка двигателя может стать причиной неудобства водителя. С другой стороны, если двигатель может поработать на холостом ходу в течение увеличенного периода времени перед остановкой двигателя, то такая остановка двигателя позволит сэкономить лишь незначительное количество топлива. Следовательно, в некоторых условиях движения и при некоторых действиях водителей обеспечить значительную экономию топлива может быть непросто.
Раскрытие изобретения
Авторы изобретения выявили упомянутые выше недостатки и разработали способ эксплуатации двигателя, включающий в себя: автоматическую остановку двигателя при наличии одного или более условий работы транспортного средства, удовлетворяющих критерию остановки двигателя; корректировку критерия остановки двигателя при таких условиях остановки двигателя, которые определены с помощью одной или более функций оптимальности.
Путем корректировки критерия остановки двигателя в результате оценки условий остановки двигателя по одной или более функций оптимальности можно повысить эффективность использования топлива при снижении степени неудобства водителя. Например, если водитель обычно отпускает педаль тормоза транспортного средства сразу после остановки транспортного средства, позволяя транспортному средству медленно двигаться по инерции, может оказаться желательным увеличить время холостого хода двигателя после остановки транспортного средства для снижения вероятности остановки двигателя, когда водитель не нажимает на педаль тормоза. С другой стороны, если водитель обычно ждет несколько минут перед тем, как подать команду на ускорение транспортного средства после остановки транспортного средства, может оказаться желательным остановить двигатель только в случае остановки транспортного средства, чтобы сэкономить больше топлива.
Представленная стратегия обеспечивает ряд преимуществ. В частности, такой подход может обеспечить повышение эффективности использования топлива транспортного средства с автоматическим запуском и остановкой для большего количества водителей. Кроме того, описанный подход может помочь снизить степень неудобства водителей, останавливая двигатель тогда, когда водитель этого ожидает. Кроме того, предложенная методика может повысить согласованность остановки и запуска двигателя.
Указанные выше преимущества, а также прочие преимущества и характеристики настоящего изобретения будут очевидны при ознакомлении с приведенным далее подробным описанием, отдельно или со ссылкой на сопроводительные чертежи.
Следует понимать, что вышеприведенное краткое изложение сущности изобретения представлено для описания в упрощенной форме ряда выбранных концепций, дальнейшее изложение которых приводится ниже в подробном описании. Краткое раскрытие сущности изобретения не направлено на определение основных или существенных характеристик заявленного предмета изобретения, объем которого однозначно определяется формулой изобретения. Кроме того, заявленный предмет изобретения не ограничивается вариантами реализации изобретения, устраняющими какой-либо из недостатков, указанных выше или в любой части данного раскрытия.
Краткое описание чертежей
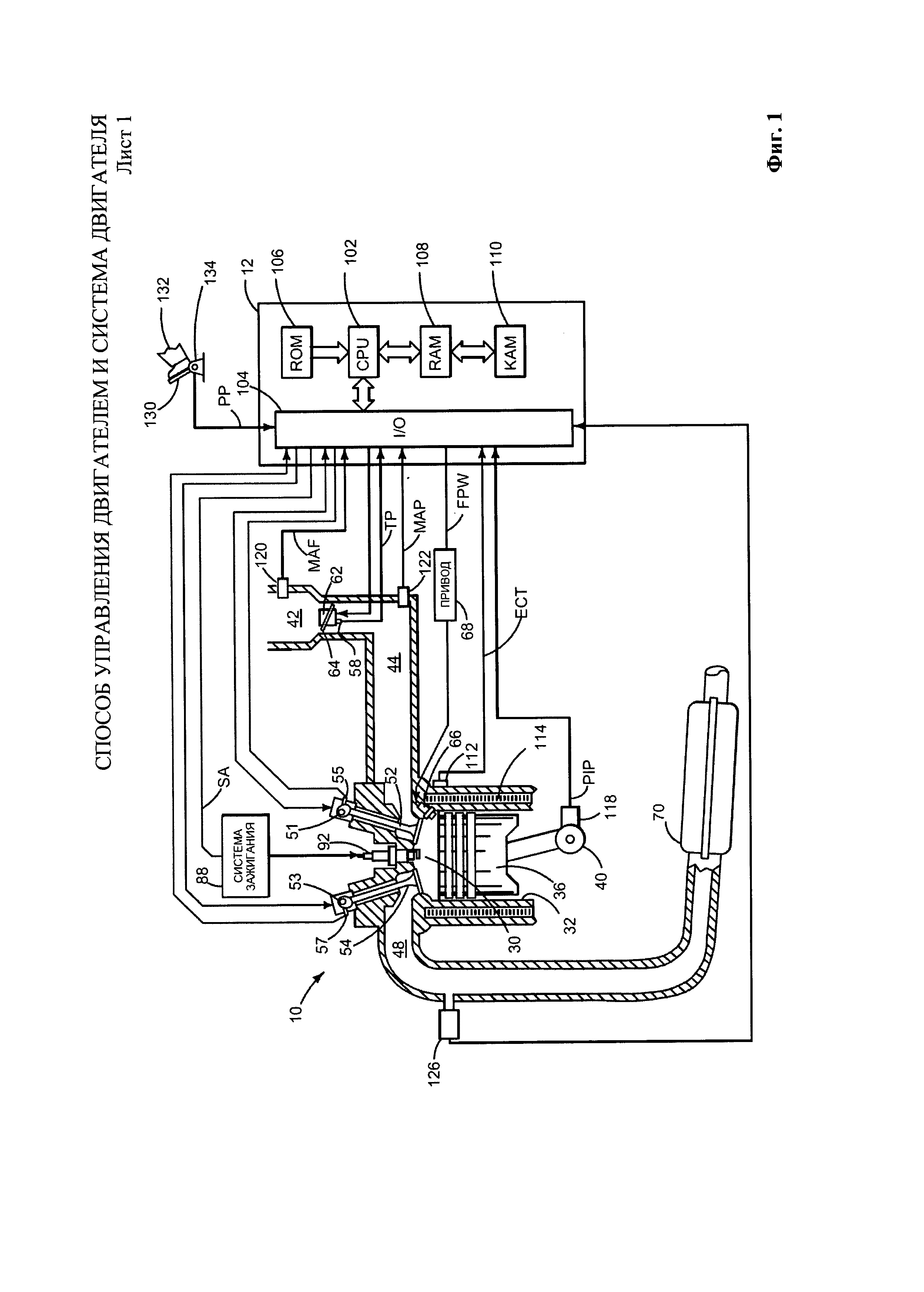
На Фиг.1 представлено схематическое изображение системы двигателя.
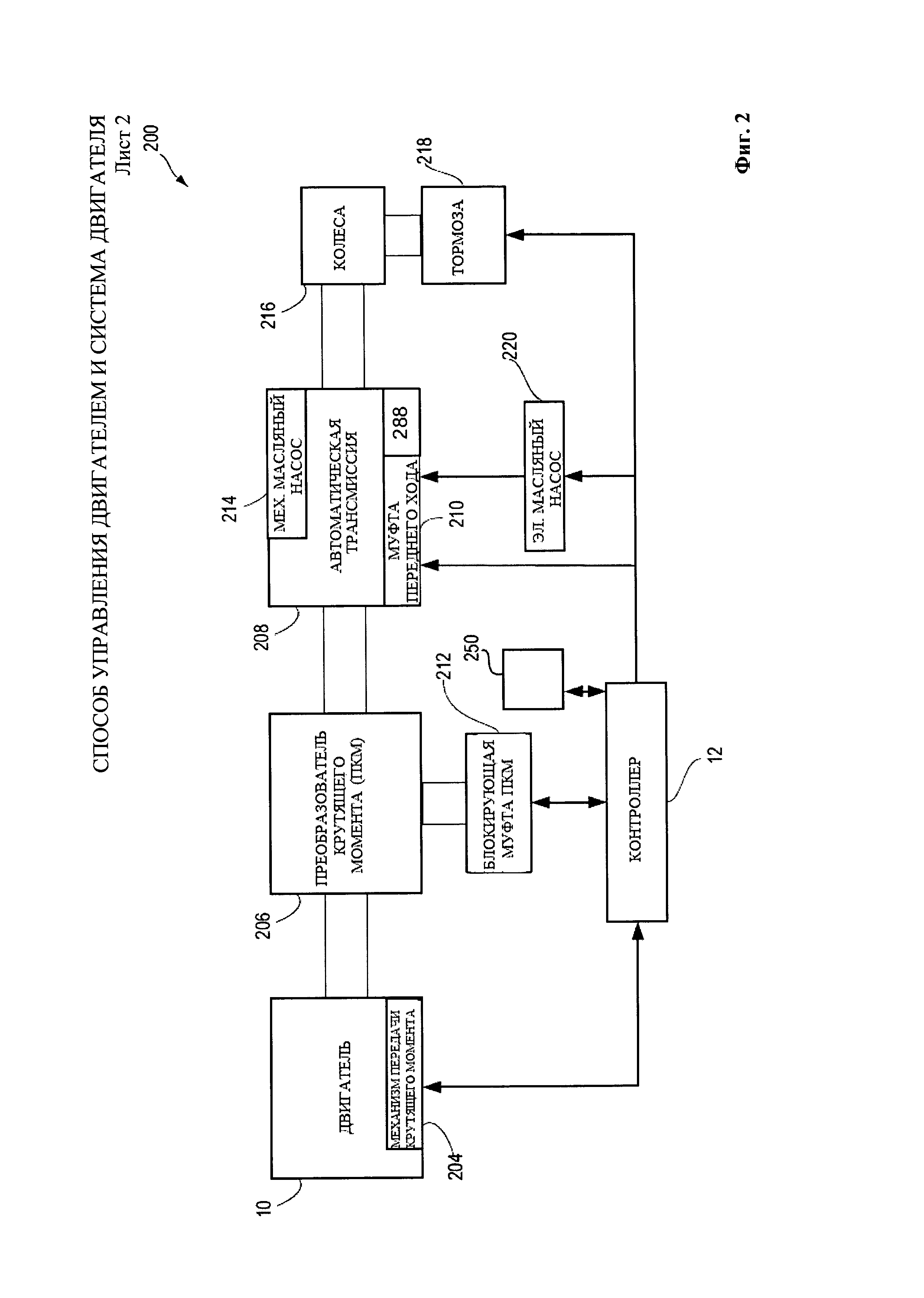
На Фиг.2 приведен пример модели системы транспортного средства.
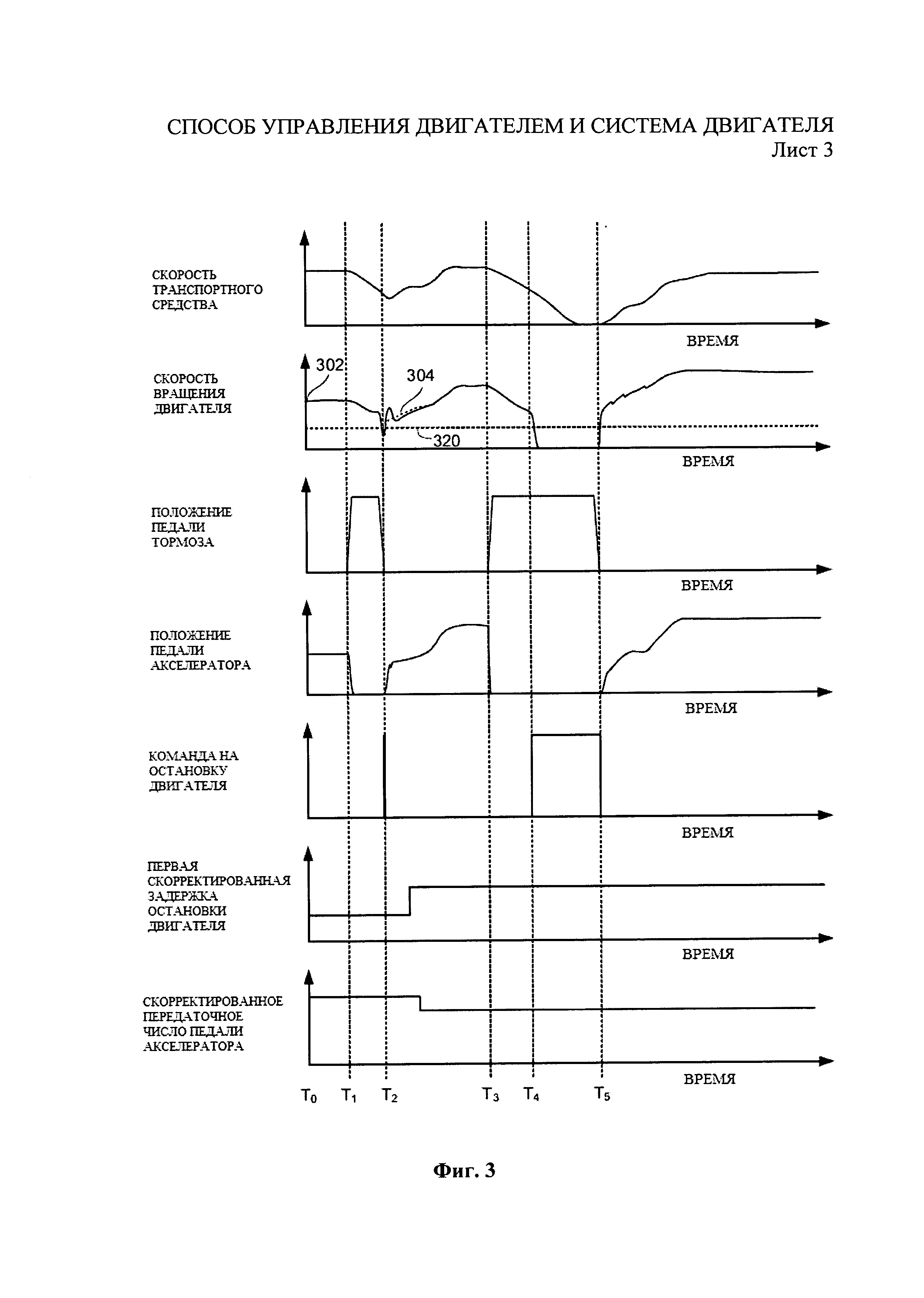
На Фиг.3 приведены примеры графиков для представляющих интерес сигналов во время смоделированной остановки или перезапуска двигателя.
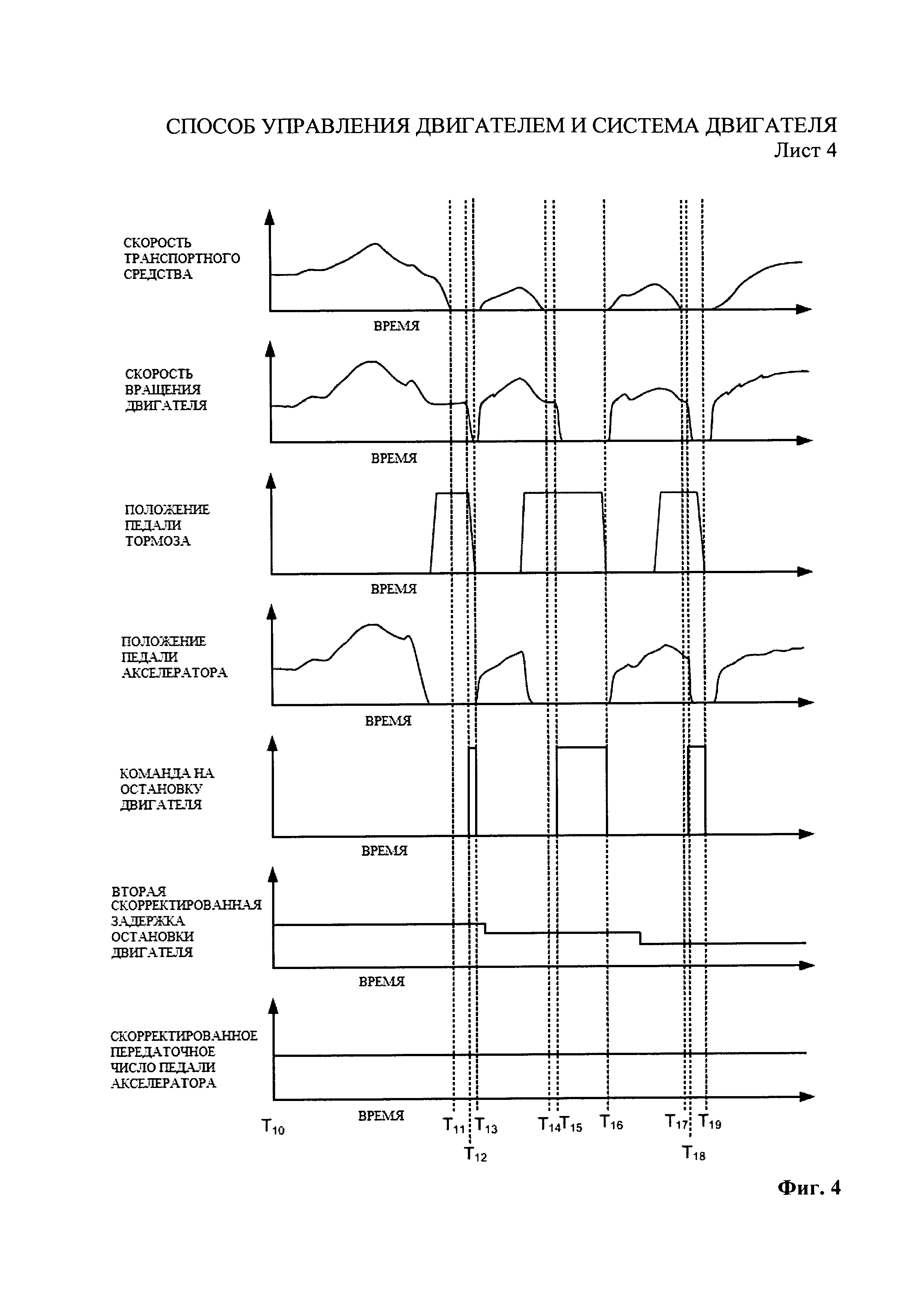
На Фиг.4 приведены другие примеры графиков для представляющих интерес сигналов во время смоделированной последовательности процессов остановки и запуска двигателя.
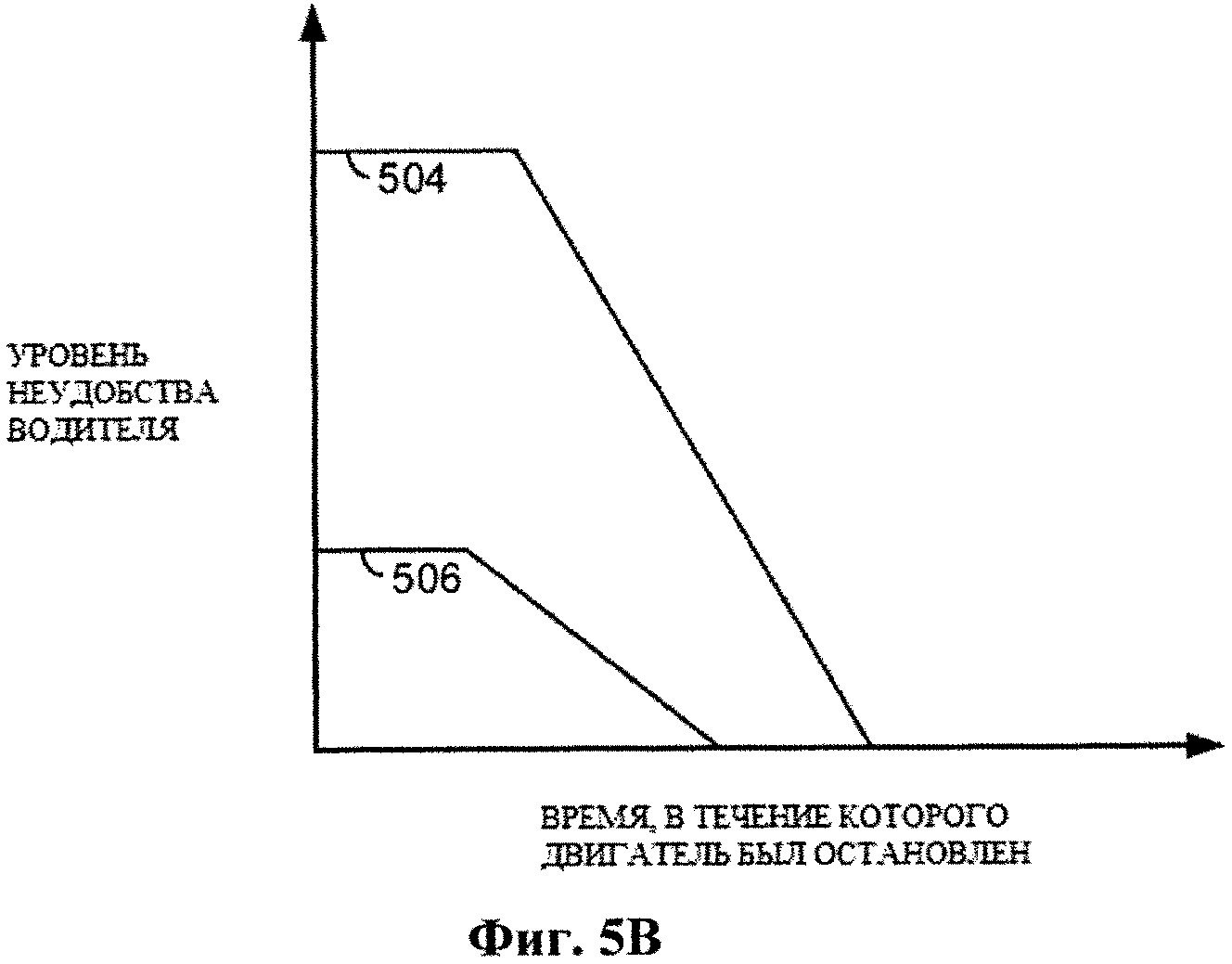
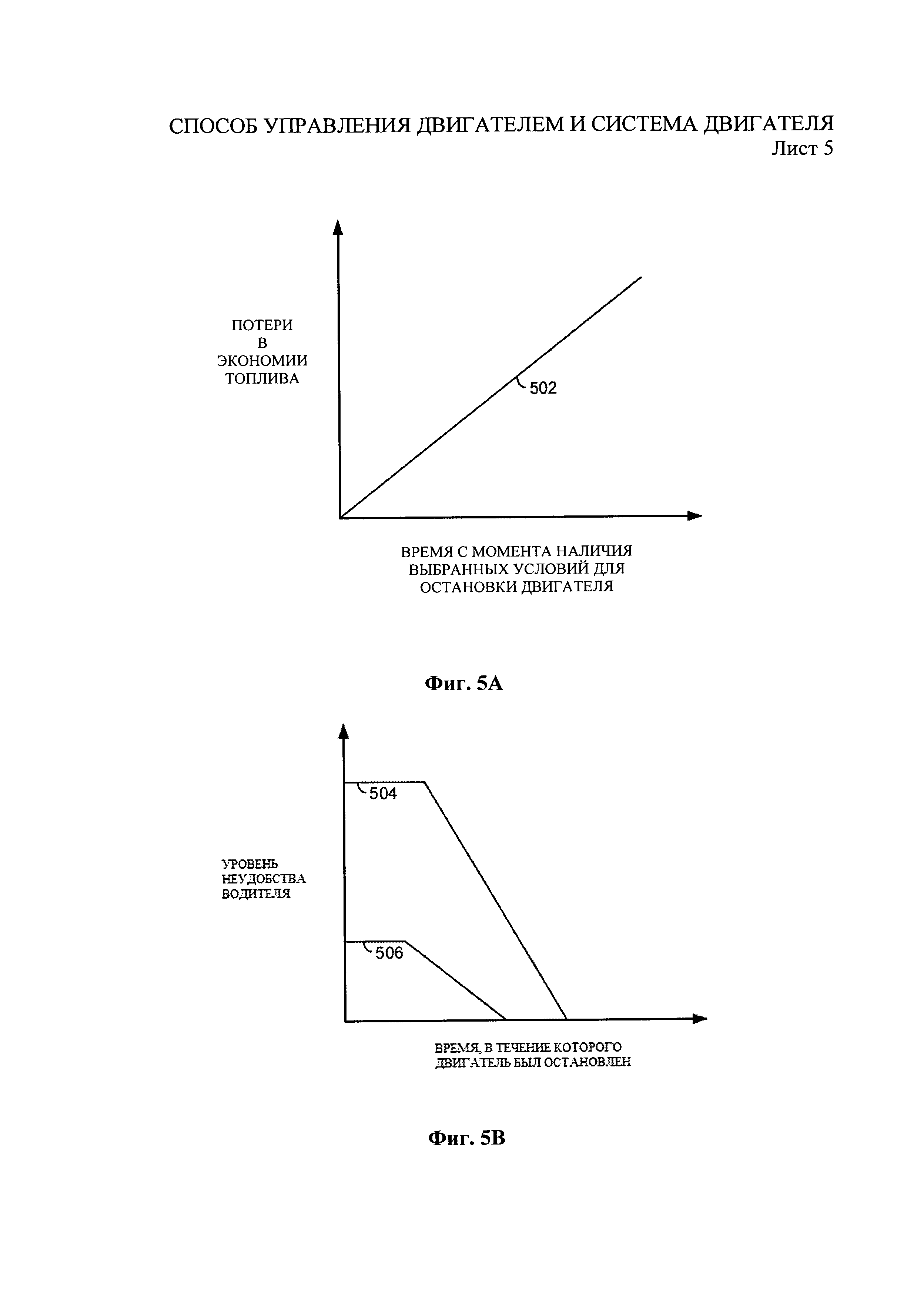
На Фиг.5A и 5B приведены примеры функций оптимальности, используемых после остановки двигателя.
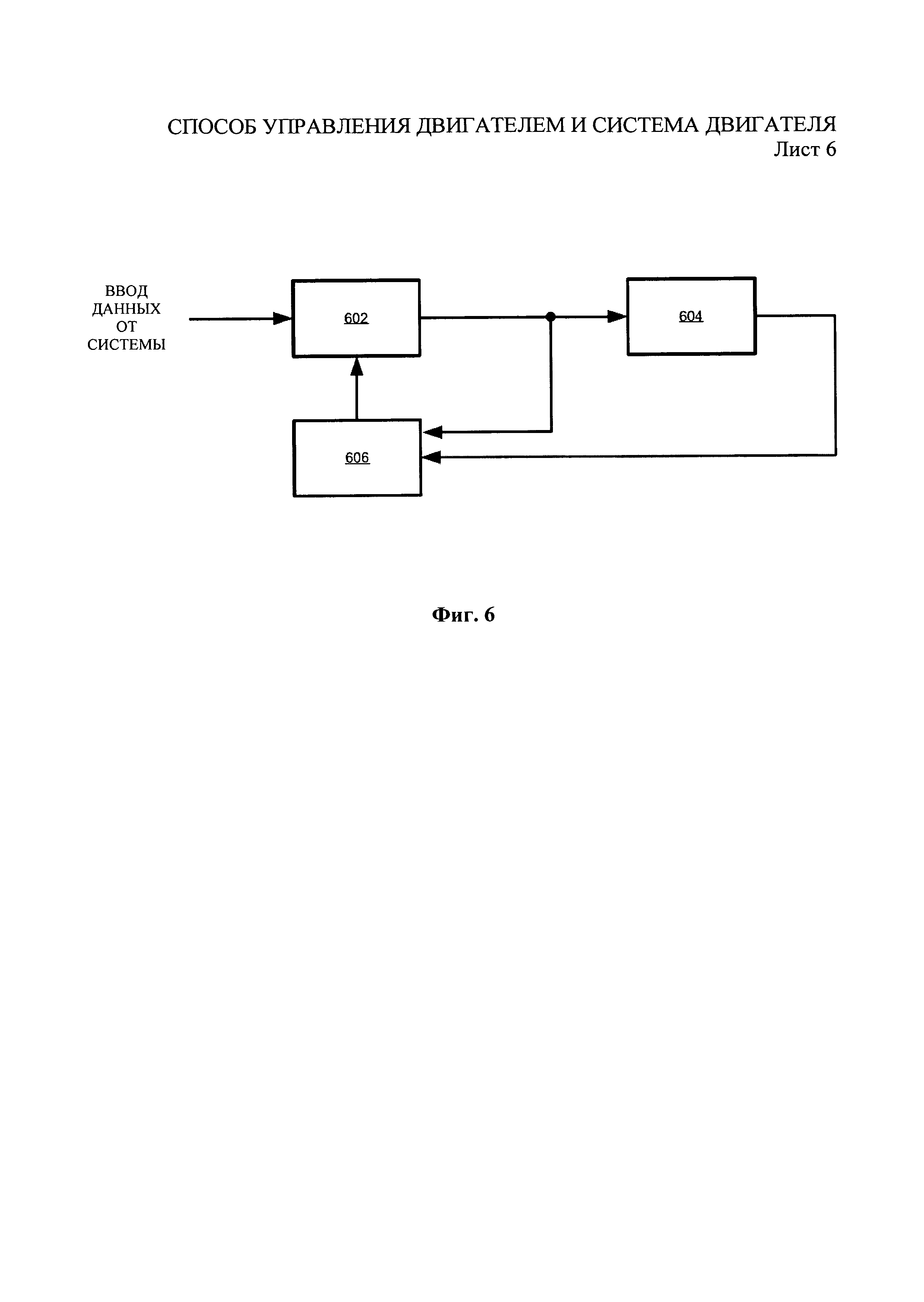
Фиг.6 представляет собой блочную диаграмму примера системы остановки и запуска двигателя транспортного средства.
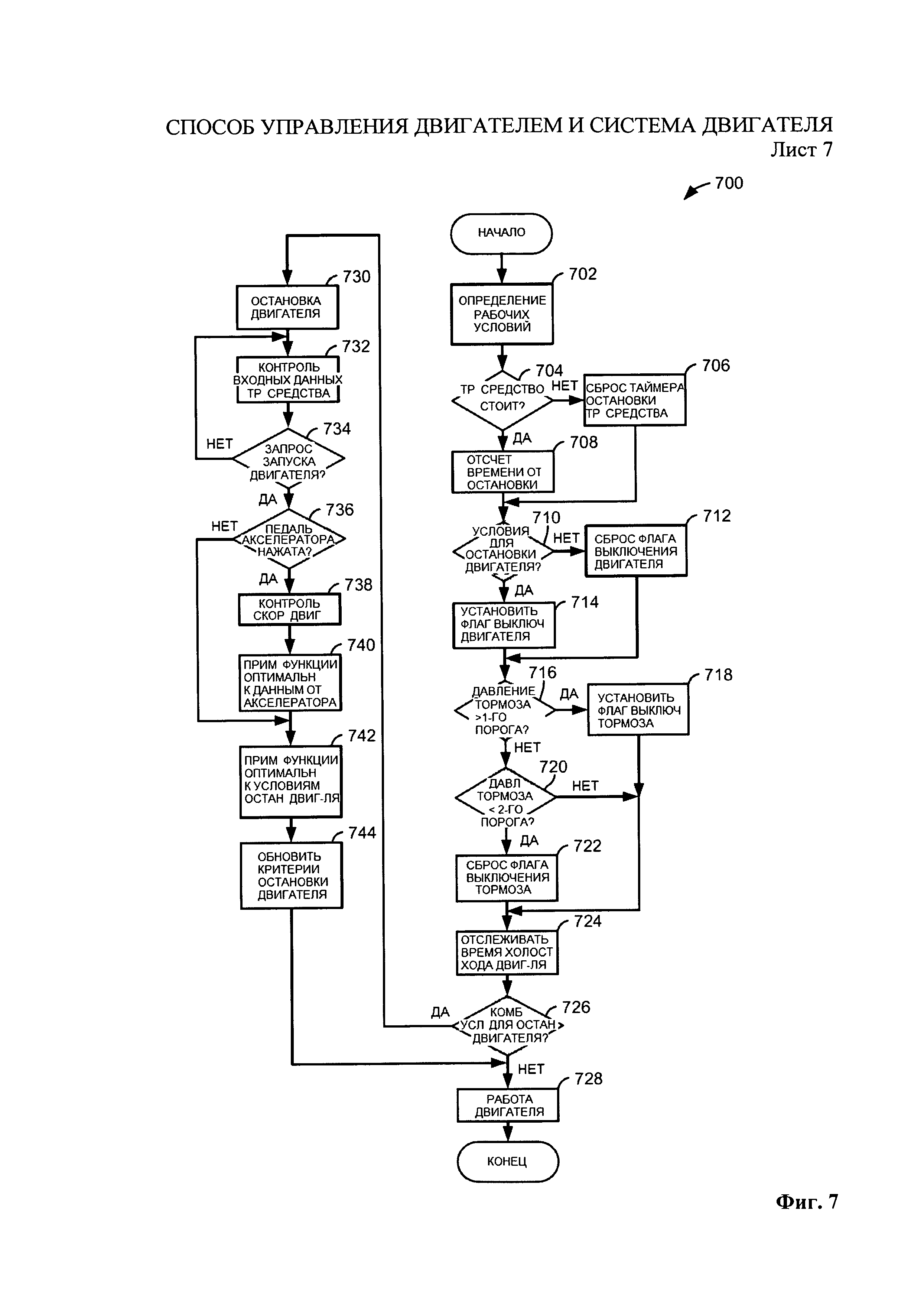
Фиг.7 представляет собой блок-схему примера способа остановки и запуска двигателя.
Осуществление изобретения
Настоящее описание относится к автоматической остановке и автоматическому запуску двигателя. В одном неограничивающем примере двигатель может иметь конфигурацию, показанную на Фиг.1. Двигатель может быть частью транспортного средства, как показано на Фиг.2. Остановка и запуск двигателя могут быть выполнены согласно методике, проиллюстрированной на Фиг.7. На Фиг.6 показан один пример блочной диаграммы способа остановки двигателя, а на Фиг.5A и 5B показана функция оптимальности, которая может быть использована в системе автоматической остановки двигателя. На Фиг. 3 и 4 показаны примеры рабочих последовательностей транспортного средства согласно методике, проиллюстрированной на Фиг.7.
На Фиг.1 показана схема двигателя 10 внутреннего сгорания, содержащего несколько цилиндров, один из которых представлен на Фиг.1, и который управляется электронным контроллером 12 двигателя. Двигатель 10 содержит камеру 30 сгорания и стенки 32 цилиндра с поршнем 36, размещенным в них и соединенным с коленчатым валом 40. Камера 30 сгорания показана сообщающейся с впускным коллектором 44 и выпускным коллектором 48 через соответствующие впускной клапан 52 и выпускной клапан 54. Каждый впускной и выпускной клапан может быть приведен в действие впускным кулачком 51 и выпускным кулачком 53. В другом случае один или больше впускных и выпускных клапанов могут приводиться в действие электромеханической обмоткой клапана и якорем в сборе. Положение впускного кулачка 51 может быть определено датчиком 55 впускного кулачка. Положение выпускного кулачка 53 может быть определено датчиком 57 выпускного кулачка.
Топливная форсунка 66 показана расположенной таким образом, чтобы впрыскивать топливо непосредственно в камеру сгорания 30, что известно специалистам в данной области как «прямой впрыск». Альтернативно, топливо может впрыскиваться во впускные каналы, что известно специалистам как «впрыск во впускные каналы». Топливная форсунка 66 поставляет топливо пропорционально ширине импульса сигнала (FPW) от контроллера 12. Топливо подается к топливной форсунке 66 топливной системой (не показана), содержащей топливный бак, топливный насос и топливную рампу (не показаны). На топливную форсунку 66 подается рабочий ток от привода 68, который реагирует на сигналы контроллера 12. Кроме того, впускной коллектор 44 показан сообщающимся с необязательным электронным дросселем 62, который регулирует положение дроссельной заслонки 64 для контроля воздушного потока от воздухозаборника 42 к впускному коллектору 44. В одном примере, может быть использована система непосредственного впрыска низкого давления, где давление топлива может быть поднято до примерно 20-30 бар. В качестве альтернативы, для создания большего топливного давления топлива может быть использована двухстадийная топливная система высокого давления.
Бесконтактная система 88 зажигания обеспечивает искру зажигания в камере 30 сгорания с помощью свечи 92 зажигания под управлением контроллера 12. Универсальный кислородный датчик 126 (UEGO) показан соединенным с выхлопным коллектором 48 выше по потоку каталитического конвертера 70. Кроме того, бистабильный датчик содержания кислорода в отработавших газах может быть заменен универсальным кислородным датчиком 126 (UEGO).
Согласно одному из примеров, конвертер 70 может содержать несколько блоков катализаторов. В других примерах могут использоваться устройства снижения токсичности отработавших газов, каждое из которых содержит несколько блоков. Конвертер 70 может быть трехкомпонентным каталитическим нейтрализатором.
Контроллер 12 показан на Фиг.1 как традиционный микрокомпьютер, содержащий: микропроцессорный блок 102 (CPU), порты 104 ввода и вывода (I/O), постоянное запоминающее устройство 106 (ROM), оперативную память 108 (RAM), оперативную энергонезависимую память ПО (KAM) и обычную шину данных. Контроллер 12 показан получающим различные сигналы от датчиков, соединенных с двигателем 10. Помимо описанных выше сигналов, контроллер также получает следующие данные: о температуре охлаждающей жидкости двигателя (ECT) от датчика 112 температуры, соединенного с каналом 114 охлаждения; от датчика положения 134, соединенного с педалью газа 130, для измерения силы нажатия ногой 132; измерения давления в коллекторе двигателя (MAP) от датчика давления 122, соединенного с впускным коллектором 44; о фазе двигателя с датчика 118 на эффекте Холла, считывающего положение коленчатого вала 40; показания датчика 120 воздушной массы, поступающей в двигатель; и показания положения дросселя от датчика 58. Также для обработки контроллером 12 может быть измерено барометрическое давление (датчик не показан). Согласно предпочтительному варианту воплощения изобретения, датчик 118 на эффекте Холла производит заранее установленное количество равномерных импульсов в каждый цикл коленчатого вала, на основании которых может быть определена скорость вращения двигателя (RPM).
В некоторых примерах двигатель может быть соединен с электромотором/батареей, как например, в гибридных автомобилях. Автомобиль с гибридным приводом может иметь параллельную и последовательную конфигурации, а также их комбинации и вариации. Кроме того, в некоторых вариантах можно использовать другие конфигурации двигателя, например, дизельный двигатель.
Во время работы каждый цилиндр в двигателе 10 обычно проходит 4 рабочих цикла: впуск, сжатие, рабочий ход и выпуск. Во время впуска обычно выпускной клапан 54 закрывается, а впускной клапан 52 открывается. Воздух поступает в камеру сгорания 30 через впускной коллектор 44, а поршень 36 двигается по направлению к дну цилиндра так, чтобы увеличить объем внутри камеры сгорания 30. Положение, в котором поршень 36 находится рядом с дном цилиндра и в конце своего хода (т.е. когда камера сгорания 30 имеет наибольший объем) обычно называется специалистами в данной области нижней мертвой точкой (HMT). Во время хода сжатия впускной клапан 52 и выпускной клапан 54 закрыты. Поршень 36 двигается по направлению к головке цилиндров, чтобы сжать воздух внутри камеры сгорания 30. Точка, в которой поршень 36 находится в конце своего хода и наиболее близко к головке цилиндров (т.е. когда камера сгорания имеет наименьший объем) обычно называется специалистами в данной области верхней мертвой точкой (BMT). В процессе, здесь и далее обозначаемом «впрыскивание», топливо поступает в камеру сгорания. В процессе, здесь и далее обозначаемом «зажигание», впрыснутое топливо воспламеняют с помощью известных способов зажигания, таких как свеча 92 зажигания, что приводит к сгоранию. Во время рабочего хода расширяющиеся газы толкают поршень 36 обратно к HMT. Коленчатый вал 40 превращает движение поршня в крутящий момент вращающегося вала. Наконец, во время хода выпуска, выпускной клапан 54 открывается, чтобы выпустить воспламененную смесь воздуха и топлива в выпускной коллектор 48, а поршень возвращается к BMT. Можно отметить, что вышеизложенное приведено только в качестве примера, и распределение по времени открывания и/или закрывания впускного и выпускного клапанов может меняться так, чтобы обеспечить положительное или отрицательное перекрытие клапанов, позднее закрывание впускного клапана или различные другие варианты.
Фиг.2 представляет собой блочную диаграмму транспортного средства 200. Транспортное средство 200 может быть приведено в движение с помощью двигателя 10. Двигатель 10 может быть запущен с помощью системы запуска двигателя (не показана). Крутящий момент двигателя 10 может быть отрегулирован с помощью механизма 204 передачи крутящего момента, например, топливной форсунки, дросселя и т.д.
Выходной крутящий момент двигателя может передаваться на преобразователь 206 крутящего момента для привода автоматической трансмиссии 208. Для перемещения транспортного средства может быть использована одна или более муфт сцепления, включая муфту 210 переднего хода. В одном примере преобразователь крутящего момента может относиться к компонентам трансмиссии. Трансмиссия 208 может включать в себя множество зубчатых муфт 288 (например, для передач 1-6), которые при необходимости могут быть включены для активации совокупности фиксированных передаточных отношений. Выходное значение преобразователя крутящего момента может, в свою очередь, быть проконтролировано с помощью блокирующей муфты 212 преобразователя крутящего момента. Например, когда блокирующая муфта 212 преобразователя крутящего момента полностью выключена, преобразователь 206 крутящего момента передает крутящий момент двигателя на автоматическую трансмиссию 208 через гидравлическую связь между турбиной преобразователя крутящего момента и крыльчаткой преобразователя крутящего момента, тем самым обеспечивая увеличение крутящего момента. И наоборот, когда блокирующая муфта 212 преобразователя крутящего момента полностью включена, выходной крутящий момент двигателя напрямую передается через муфту преобразователя крутящего момента ведущему валу (не показан) трансмиссии 208. В качестве альтернативы, блокирующая муфта 212 преобразователя крутящего момента может быть частично включена, тем самым обеспечивая возможность регулирования величины крутящего момента, передаваемого трансмиссии. Контроллер может быть выполнен с возможностью регулировать величину крутящего момента, передаваемого преобразователем крутящего момента 212, путем изменения положения блокирующей муфты преобразователя крутящего момента при различных условиях работы двигателя или на основании запрашиваемого водителем режима работы двигателя.
Выходной крутящий момент от автоматической трансмиссии 208 может, в свою очередь, быть передан на колеса 216 для перемещения транспортного средства. В частности, автоматическая трансмиссия 208 может передавать входной движущий крутящий момент на ведущем валу (не показан) в зависимости от условий движения транспортного средства до передачи выходного движущего крутящего момента на колеса.
Сила торможения может быть приложена к колесам 216 с помощью включения колесных тормозов 218. В одном примере колесные тормоза 218 могут быть включены при нажатии водителем педали тормоза (не показана). Аналогичным образом, сила трения, действующая на колеса 216, может быть уменьшена за счет выключения колесных тормозов 218 при отпускании водителем педали тормоза. Тормоза транспортного средства могут применять силу трения к колесам 216 в качестве части процесса автоматической остановки двигателя.
С автоматической трансмиссией 208 может быть гидравлически соединен механический масляный насос 214, предназначенный для создания гидравлического давления, обеспечивающего включение различных муфт, например, муфты 210 переднего хода и/или блокирующей муфты 212 преобразователя крутящего момента. Работа механического масляного насоса 214 может быть согласована с работой преобразователя крутящего момента 212, и этот насос может, например, приводиться в движение за счет вращения двигателя или ведущего вала трансмиссии. Таким образом, гидравлическое давление, создаваемое механическим масляным насосом 214, может увеличиваться при увеличении скорости двигателя, а также при уменьшении скорости двигателя понижаться. С автоматической трансмиссией также гидравлически соединен электрический масляный насос 220, который, однако, работает независимо от приводной силы двигателя 10 или трансмиссии 208. Он может быть использован для увеличения гидравлического давления механического масляного насоса 214. Электрический масляный насос 220 может быть приведен в движение с помощью электродвигателя (не показан), на который может поступать электрическая мощность, например, от аккумулятора (не показан).
Контроллер 12 может быть выполнен с возможностью принимать сигналы от двигателя 10 и устройства 250 ввода команд водителя, как более подробно показано на Фиг.1, и управлять соответствующим образом выходным крутящим моментом двигателя и/или работой преобразователя крутящего момента, трансмиссии, муфт и/или тормозов. В одном примере выходным крутящим моментом можно управлять с помощью сочетания регулировки моментов зажигания, ширины импульса подачи топлива, моментов генерации импульсов подачи топлива и/или заряда воздуха путем управления моментами открытия дросселя и/или переключения клапана, подъема клапана и наддува для двигателей с наддувом или турбонаддувом. В дизельных двигателях контроллер 12 может управлять выходным крутящим моментом двигателя с помощью контроля комбинации ширины импульса подачи топлива, моментов подачи топлива и/или объема заряда воздуха. В любом случае, управление двигателем может осуществляться на основании принципа поочередной работы с каждым цилиндром (cylinder-by-cylinder) для управления выходным крутящим моментом двигателя. Устройство ввода команд водителя может включать в себя интерактивный дисплей, переключатели и иные известные устройства ввода данных.
При наличии условий для холостого хода контроллер 12 может инициировать остановку двигателя за счет прекращения подачи топлива или искры в двигателе. Для поддержания определенного уровня вращения трансмиссии контроллер может тормозить вращающиеся элементы трансмиссии 208 на корпус трансмиссии, а следовательно, на раму транспортного средства.
Если условия для перезапуска двигателя выполнены, и/или если водитель транспортного средства хочет запустить транспортное средство, контроллер 12 может перезапустить двигатель за счет поддерживания процесса сгорания в цилиндрах двигателя. Для возврата крутящего момента ведущим колесам 216 трансмиссия 208 может быть разблокирована, а колесные тормоза 218 выключены. Давление муфты трансмиссии может быть отрегулировано таким образом, чтобы разблокировать трансмиссию, при этом давление колесных тормозов может быть также изменено для координации выключения тормозов и разблокировки трансмиссии и запуска транспортного средства.
Система, показанная на Фиг.1 и 2, включает в себя: двигатель; контроллер, в постоянном запоминающем устройстве которого хранятся инструкции, обеспечивающие автоматическую остановку двигателя при соответствии одного или более условий работы транспортного средства критериям остановки двигателя, инструкции по регулировке критериев остановки двигателя после оценки условий остановки двигателя с помощью одной или более функций оптимальности, а также инструкции по корректировке одной или более функций оптимальности. Одна или более функций оптимальности могут быть скорректированы при вводе определенных команд водителем. Система также включает в себя устройство ввода команд водителем для корректировки одной или более функций оптимальности. Система также включает в себя дополнительные инструкции для корректировки передаточной функции исполнительного механизма, применяемой во время разгона двигателя к условиям запуска двигателя, которые оценивают с помощью функции оптимальности запуска двигателя. Одна или более функций оптимальности могут оценивать зависимости времени, в течение которого двигатель был остановлен, от степени неудобства водителя.
На Фиг.3 приведены примеры графиков для представляющих интерес сигналов во время смоделированных процессов остановки и перезапуска двигателя. Последовательность процессов, показанная на Фиг.3, может быть реализована путем выполнения инструкций в системе, показанной на Фиг.1 и 2 способом, показанным на Фиг.7. Вертикальные метки в моменты T0-T5 представляют собой интересующие моменты времени в ходе выполнения последовательности. Между возникновением различных условий остановки двигателя в последовательности на Фиг.3 проходит достаточно много времени. В настоящем примере остановка вращения двигателя разрешена во время движения транспортного средства, чтобы повысить эффективность использования топлива, когда между условиями остановки двигателя проходит достаточно много времени.
На первом графике на Фиг.3 показано изменение скорости транспортного средства во времени. По оси Y отложена скорость транспортного средства, которая увеличивается в направлении стрелки на оси Y. По оси X отложено время, которое увеличивается слева направо.
На втором графике на Фиг.3 показано изменение скорости вращения двигателя во времени. По оси Y отложена скорость вращения двигателя, которая увеличивается в направлении стрелки на оси Y. По оси X отложено время, которое увеличивается слева направо. Горизонтальная линия 320 обозначает нужную скорость двигателя на холостом ходу. Пунктирная линия 302 обозначает фактическую скорость вращения двигателя, а точечная линия 304 обозначает нужную скорость вращения двигателя. Если на графике показана только фактическая скорость 302 вращения двигателя, нужная скорость 304 вращения двигателя совпадает с фактической скоростью 302 вращения двигателя.
На третьем графике на Фиг.3 показано изменение положения педали тормоза во времени. По оси Y отложено положение педали тормоза, степень нажатия которой увеличивается в направлении стрелки на оси Y. По оси X отложено время, которое увеличивается слева направо.
На четвертом графике на Фиг.3 показано изменение положения педали акселератора во времени. По оси Y отложено положение педали акселератора, степень нажатия которой увеличивается в направлении стрелки на оси Y. По оси X отложено время, которое увеличивается слева направо.
На пятом графике на Фиг.3 показано изменение наличия команды на автоматическую остановку двигателя во времени. По оси Y отложено наличие команды на автоматическую остановку двигателя, подача которой показана высоким уровнем сигнала по направлению стрелки на оси Y. По оси X отложено время, которое увеличивается слева направо.
На шестом графике сна Фиг.3 показана длительность задержки остановки двигателя после выполнения других выбранных условий остановки двигателя. В настоящем примере временная задержка представляет собой задержку остановки вращения двигателя после выполнения условий остановки во время движения транспортного средства. По оси Y отложена скорректированная задержка остановки, которая увеличивается в направлении стрелки на оси Y. По оси X отложено время, которое увеличивается слева направо.
На седьмом графике на Фиг.3 показан коэффициент усиления передаточной функции педали акселератора во время разгона двигателя. Другими словами, разгон двигателя может быть интерпретирован как время от остановленного двигателя до достижения двигателем предельного значения скорости вращения (например, скорости холостого хода). По оси Y отложен коэффициент усиления передаточной функции педали акселератора, которое увеличивается в направлении стрелки на оси Y. По оси X отложено время, которое увеличивается слева направо.
В момент T0 транспортное средство движется со средней скоростью, а двигатель вращается с ненулевой скоростью, как показано на графике. Педаль тормоза не нажата, а педаль акселератора находится в среднем положении и отвечает на команды водителя. Команда на автоматическую остановку отсутствует, а адаптированная задержка остановки двигателя и коэффициент усиления педали акселератора находятся на фиксированном уровне.
В момент T1 уровень сигнала педали акселератора падает в ответ на отпускание водителем педали акселератора. Скорость вращения двигателя и скорость транспортного средства начинают уменьшаться в ответ на уменьшение запрашиваемого крутящего момента двигателя, связанного со степенью нажатия педали акселератора. Сразу после этого происходит задействование тормозов в ответ на нажатие водителем на педаль тормоза транспортного средства, и скорость замедления возрастает. Команда на остановку двигателя отсутствует, адаптированная задержка остановки двигателя и степень изменения коэффициента усиления педали акселератора остаются на прежнем уровне.
Между моментами T1 и T2 скорость вращения двигателя уменьшается из-за отсутствия команды на ускорение от водителя, а скорость транспортного средства падает в ответ на включение тормозов транспортного средства водителем. Кроме того, непосредственно перед моментом T2 подается команда на остановку двигателя. В настоящем примере команда на остановку двигателя выдается в результате понижения скорости транспортного средства, превышения порогового значения времени с момента отпускания педали акселератора и нажатия педали тормоза. Выдача команды на остановку двигателя прекращает подачу искры и топлива в двигатель, а скорость вращения двигателя падает с увеличенной скоростью.
В момент T2 водитель отпускает педаль тормоза, о чем свидетельствует уменьшение уровня сигнала от педали тормоза. Отпускание водителем педали тормоза меняет состояние команды на остановку двигателя с подтвержденного на неподтвержденное. Происходит перезапуск двигателя путем подачи топлива или искры в двигатель. В момент T2 или сразу после него водитель также нажимает педаль акселератора, для обозначения намерения увеличить скорость транспортного средства. Фактическая скорость вращения двигателя 302 возрастает сразу после подачи топлива и искры в двигатель, а крутящий момент двигателя растет в ответ на нажатие педали акселератора. В одном примере первая передаточная функция педали акселератора, которая соотносит положение педали акселератора с нужным крутящим моментом двигателя, является основанием для увеличения крутящего момента двигателя во время его разгона. Первая передаточная функция педали акселератора умножается на адаптированный коэффициент усиления педали акселератора на седьмом графике для корректировки нужного крутящего момента двигателя. Вторая передаточная функция педали акселератора используется в качестве основания для определения крутящего момента двигателя после того, как скорость вращения двигателя превысит скорость холостого хода в первый раз после остановки двигателя. Первая и вторая передаточные функции педали акселератора обуславливают различные реакции двигателя на нажатие педали акселератора при разных условиях работы двигателя. Однако в некоторых примерах может быть использована только одна передаточная функция педали акселератора. В результате изменения нужного крутящего момента двигателя также будет изменено количество топлива, искры и подаваемого воздуха.
Сразу после момента T2 скорость вращения двигателя возрастает, искра и топливо поступают в двигатель в результате увеличения значения нужного крутящего момента двигателя, обусловленного входным значением степени нажатия педали акселератора умноженным на адаптированный коэффициент усиления педали акселератора. Фактическая скорость вращения двигателя 302 становится выше нужного значения 304. Водитель также частично отпускает педаль акселератора для управления скоростью вращения двигателя, в результате этого фактическая скорость 302 падает ниже желаемого значения 304. Сравнение желаемой скорости 304 вращения двигателя и фактической скорости вращения двигателя происходит во время разгона двигателя и после него в течение заранее заданного времени. Чтобы избежать увеличения уровня неудобства водителя, сравнение обрабатывается с помощью функции оптимальности, значение которой равно разности между нужной и фактической скоростями вращения двигателя. Сразу после этого коэффициент усиления педали акселератора уменьшается в соответствии с полученным значением функции оптимальности. В одном примере сравнение нужной скорости вращения двигателя и фактической скорости вращения двигателя позволяет определить величину, на которую фактическая скорость вращения двигателя превышает нужную скорость вращения двигателя. Сравнение может также помочь определить длительность времени, в течение которого нужная скорость вращения двигателя была превышена. Если фактическая скорость вращения двигателя ниже нужной скорости вращения двигателя, результат сравнения представляет собой самую большую разность между фактической и нужной скоростью вращения двигателя, а также длительность времени, в течение которого такая разность имела место. Затем функция оптимальности позволяет отрегулировать коэффициент усиления педали акселератора на основании сравнения входного значения со значением функции оптимальности. В некоторых примерах уточненный коэффициент усиления педали акселератора может быть использовано только на определенном участке передаточной функции педали акселератора (например, входные значения положения педали, не превышающие 10% от максимального значения нажатия педали). Коэффициент усиления педали акселератора может быть умножено на выходное значение функции оптимальности, или функция оптимальности может позволить отрегулировать коэффициент усиления педали акселератора с помощью другой функции или увеличить/уменьшить его на заранее определенную величину.
Кроме того, после момента Т2, для определения длительности периода, в течение которого двигатель был остановлен, измеряется время между моментами T1 и T2. Длительность времени, в течение которого двигатель был остановлен, является входным значением для функции оптимальности, которая определяет уровень неудобства водителя на основании времени, в течение которого выбранное условие позволяло выполнить остановку двигателя. Значение функции уровня неудобства водителя может быть эмпирически определено для различных водителей путем пробного автоматического запуска и остановки двигателя. В настоящем примере время, в течение которого двигатель остановлен, является небольшим. Таким образом, уровень неудобства высок. Таким образом, адаптированная задержка остановки двигателя (например, время между достижением выбранных условий остановки двигателя и временем выдачи команды на остановку двигателя) растет, увеличивая время до подачи команды на остановку двигателя при аналогичных условиях. В одном примере величина увеличения/уменьшения задержки остановки двигателя может быть скорректирована на заранее определенное значение, когда выходное значение функции оптимальности указывает на то, что уровень неудобства водителя выше порогового значения. В других примерах значение задержки остановки двигателя может быть умножено на выходное значение функции неудобства водителя для регулировки или коррекции задержки остановки двигателя. По окончании задержки остановки двигателя и коррекции усиления педали акселератора скорость транспортного средства возрастает, а в момент T3 начинает падать.
В момент T3 водитель еще раз отпускает педаль акселератора и сразу после этого активирует тормоза транспортного средства в соответствии с дорожными условиями. Скорость транспортного средства начинает падать после того, как крутящий момент двигателя уменьшается в ответ на отсутствие нажатия педали акселератора и включение тормозов транспортного средства. Команда на остановку двигателя не подтверждается, задержка остановки двигателя и коэффициент усиления педали акселератора остаются на постоянных уровнях.
В момент T4 подается команда на остановку двигателя, топливо и искра не поступают в двигатель. Сразу после момента T4 скорость вращения двигателя становится равной нулю, а скорость транспортного средства продолжает уменьшаться. Таким образом, вращение двигателя автоматически останавливается, а транспортное средство продолжает замедляться. Двигатель автоматически останавливается без запроса на остановку от водителя, подаваемого с помощью специального устройства, которое используется исключительно для запуска и/или остановки двигателя (например, выключатель зажигания). Автоматическая остановка двигателя основана на устройствах ввода, отличных от специального устройства ввода команд водителя на запуск и/или остановку двигателя. Педаль акселератора также остается в нажатом состоянии, а задержка остановки двигателя и коэффициент усиления педали акселератора остаются на прежних постоянных уровнях.
Между моментами T4 и T5 скорость транспортного средства падает до нуля, а нога водителя остается на педали тормоза. Двигатель также остается в остановленном состоянии, за счет чего экономится топливо.
В момент T5 водитель отпускает педаль тормоза и нажимает педаль акселератора. Фактическая скорость вращения двигателя почти равна нужной скорости вращения двигателя, транспортное средство начинает ускоряться. После момента T5 команда на остановку двигателя также отменяется и отсутствует.
После момента T5 степень нажатия педали акселератора увеличивается до нужного уровня и остается на этом уровне до конца рассматриваемого процесса. Кроме того, выполняется сравнение нужной и фактической скоростей вращения двигателя, а разность используется для функции оптимальности, которая соотносит ее с уровнем неудобства водителя. Однако на основании нужной и фактической скоростей вращения двигателя в момент T5 адаптированный коэффициент усиления педали акселератора не меняется. Аналогичным образом, время, в течение которого двигатель был остановлен, является входным значением для функции оптимальности, которая определяет уровень неудобства водителя на основании времени, в течение которого выполняются выбранные условия остановки двигателя. Так как двигатель был остановлен в течение достаточного времени, и поскольку процесс остановки двигателя не был прерван, задержка остановки двигателя более не регулируется.
На Фиг.4 представлены примеры графиков для представляющих интерес сигналов во время смоделированных остановки и перезапуска двигателя. Последовательность на Фиг.4 может быть реализована в системе, показанной на Фиг.1 и 2, с помощью методики, показанной на Фиг.7. Вертикальные метки в моменты времени T10-T19 представляют собой ключевые моменты времени в процессе выполнения последовательности. Последовательность процессов на Фиг.4 происходит тогда, когда между условиями остановки двигателя проходит относительно короткий период времени. В настоящем примере остановка вращения двигателя не может быть выполнена во время движения транспортного средства. Это уменьшает вероятность остановки двигателя и перезапуска двигателя без остановки двигателя в течение нужного времени, когда торможение является кратковременным и многократным.
На Фиг.4 показано семь графиков, которые содержат семь переменных, как на Фиг.3. Следовательно, для краткости описание одинаковых переменных будет опущено. На шестом графике показана вторая адаптированная задержка остановки двигателя, которая используется при условиях, когда время между торможениями двигателя небольшое и когда транспортное средство остановлено. В частности вторая адаптированная задержка остановки двигателя представляет собой временную задержку от момента, когда транспортное средство было остановлено, педаль акселератора не нажата, а педаль тормоза находится в нажатом состоянии, до момента подачи команды на остановку двигателя.
В момент Т10 педаль акселератора, скорость вращения двигателя и скорость транспортного средства находятся на среднем уровне. Тормоз не задействован, команда на остановку двигателя не подтверждена. Адаптированная задержка остановки двигателя и адаптированный коэффициент усиления педали акселератора находятся на постоянных уровнях.
Между моментами T10 и T11 степень нажатия педали акселератора увеличивается, а затем уменьшается до нуля по мере приближения к моменту T11 в результате запроса водителя на основании дорожных условий. Сразу после отпускания педали акселератора водитель включает тормоз транспортного средства. В ответ на включение тормоза транспортного средства и отпускания педали акселератора скорость транспортного средства падает.
В момент T11 скорость транспортного средства достигает нуля, а двигатель работает на скорости холостого хода. Водитель продолжает нажимать педаль тормоза, при этом педаль акселератора не нажата. Команда на остановку двигателя не подтверждается, а адаптированная вторая задержка остановки двигателя и коэффициент усиления педали акселератора остаются постоянными. При достижении нулевой скорости транспортного средства начинает работать таймер, его показания продолжают расти до возникновения необходимости перезапуска двигателя.
В момент T12 команда на остановку двигателя подтверждается, когда показания таймера достигают значения адаптированной задержки остановки двигателя. Подача топлива и искры в двигатель прекращается, а скорость вращения двигателя падает до нуля. Скорость транспортного средства остается равной нулю, а педаль тормоза остается нажатой. Вторая адаптированная задержка остановки двигателя и коэффициент усиления педали акселератора остаются на прежних постоянных уровнях.
В момент T13 водитель нажимает педаль тормоза, а при подаче топлива и искры происходит запуск двигателя. В ответ на отпускание водителем тормоза транспортного средства команда на остановку двигателя отменяется и отсутствует. Водитель нажимает на педаль акселератора, скорость вращения двигателя возрастает. Скорость вращения двигателя изменяется почти по нужной траектории, крутящий момент через трансмиссию передается от двигателя на колеса транспортного средства.
Между моментами T13 и T14 используется значение длительности работы двигателя на холостом ходу от момента T11 до момента T12 в качестве входного значения для функции оптимальности, которая вычисляет время холостого хода двигателя с малой экономией топлива. В одном примере в результате обработки с помощью функции оптимальности может быть получен коэффициент, который может быть использован для модификации адаптированной задержки остановки двигателя. В другом примере функция оптимальности позволяет добавить или вычесть из адаптированной задержки остановки двигателя заранее заданное значение, таким образом, внося дополнительную поправку для значения второй задержки остановки двигателя. В настоящем примере адаптированная вторая задержка остановки двигателя уменьшается из-за длительной работы двигателя на холостом ходу между достижением нулевой скорости транспортного средства и остановкой вращения двигателя. Адаптированный коэффициент усиления педали акселератора не корректируется, поскольку фактическая скорость вращения двигателя почти совпадает с нужной скоростью вращения двигателя во время его разгона. Кроме того, в настоящем примере скорость транспортного средства, скорость вращения двигателя и положение педали акселератора остаются такими, что остановка двигателя недопустима. При приближении к моменту T14 педаль акселератора переходит в отпущенное положение, а педаль тормоза - в нажатое.
В момент T14 скорость транспортного средства достигает нулевого значения, а двигатель возвращается к скорости холостого хода. Водитель продолжает нажимать педаль тормоза и не нажимать педаль акселератора. Команда на остановку двигателя не подтверждается, а адаптированные вторая задержка остановки двигателя коэффициент усиления педали акселератора остаются на постоянных уровнях, определенных до момента T14. При достижении нулевого значения скорости транспортного средства запускается таймер, который продолжает увеличивать значение до перезапуска двигателя.
В момент T15 команда на остановку двигателя подтверждается, когда показания таймера достигают значения адаптированной второй задержки остановки двигателя. Следует отметить, что время между моментами Т14 и T15 меньше, чем время между моментами T11 и T12. Меньший интервал времени является результатом уменьшения адаптированной второй задержки остановки двигателя. Подача топлива и искры в двигатель прекращается, а скорость вращения двигателя падает до нуля. Скорость транспортного средства остается равной нулю, водитель продолжает нажимать педаль тормоза. Адаптированная вторая задержка остановки двигателя и коэффициент усиления педали акселератора остаются на прежних постоянных уровнях, адаптированных после момента T13.
В момент T16 водитель отпускает педаль тормоза, и после подачи топлива и искры происходит запуск двигателя. В ответ на отпускание водителем тормоза транспортного средства команда на остановку двигателя отменяется. Сразу после этого водитель также нажимает на педаль акселератора, скорость вращения двигателя возрастает. Скорость вращения двигателя изменяется почти по нужной траектории, крутящий момент передается через трансмиссию от двигателя на колеса транспортного средства.
Между моментами T16 и T17 используется значение длительности работы двигателя на холостом ходу от момента T11 до момента T12 в качестве входного значения для функции оптимальности, которая рассчитывает время работы двигателя на холостом ходу с малой экономией топлива. В настоящем примере адаптированная вторая задержка остановки двигателя снова уменьшается, поскольку между достижением нулевой скорости транспортного средства и остановкой двигателя двигатель работает на холостом ходу в течение среднего времени. Адаптированный коэффициент усиления педали акселератора не регулируется, поскольку во время разгона двигателя фактическая скорость вращения двигателя почти совпадает с нужной скоростью вращения двигателя. Кроме того, в настоящем примере скорость транспортного средства, скорость вращения двигателя и положение педали акселератора остаются такими, что остановка двигателя недопустима.
В момент T17 скорость транспортного средства достигает нуля, а двигатель работает на скорости холостого хода. Водитель продолжает нажимать педаль тормоза и не нажимать педаль акселератора. Команда на остановку двигателя не подтверждается, а адаптированная вторая задержка остановки двигателя и коэффициент усиления педали акселератора остаются на прежних постоянных уровнях. В ответ на достижение нулевого значения скорости транспортного средства запускается таймер, показания которого продолжают увеличиваться до перезапуска двигателя.
В момент T18 в ответ на достижение таймером значения адаптированной второй задержки остановки двигателя подтверждается команда на остановку двигателя. Подача топлива и искры в двигатель прекращается, а скорость вращения двигателя падает до нуля. Скорость транспортного средства остается равной нулю, водитель продолжает нажимать педаль тормоза. Адаптированная вторая задержка остановки двигателя и коэффициент усиления педали акселератора остаются на прежних постоянных уровнях.
В момент T19 водитель отпускает педаль тормоза, после подачи топлива и искры происходит запуск двигателя. Команда на остановку двигателя отменяется и не подтверждается в ответ на отпускание водителем тормоза транспортного средства. Водитель также нажимает на педаль акселератора, скорость вращения двигателя возрастает. Скорость вращения двигателя изменяется по нужной траектории, крутящий момент через трансмиссию передается от двигателя на колеса транспортного средства.
После момента T19 длительность работы двигателя на холостом ходу между моментами T17 и T18 снова используется в качестве входного значения для функции оптимальности, которая рассчитывает время работы двигателя на холостом ходу с малой экономией топлива. Адаптированная вторая задержка остановки двигателя не уменьшается, поскольку между достижением нулевой скорости транспортного средства и остановкой вращения двигателя достигнуто нужное время работы двигателя на холостом ходу. Аналогичным образом, адаптированный коэффициент усиления педали акселератора не регулируется, поскольку фактическая скорость вращения двигателя почти совпадает с нужной скоростью вращения двигателя во время его разгона.
На Фиг.5А показан пример функции оптимальности, которая соотносит потери в экономии топлива со временем, прошедшим с момента достижения условий для выполнения остановки двигателя. По оси Y отложен уровень потерь в экономии топлива (например, уменьшение эффективности топлива), который увеличивается в направлении оси Y. На оси X отображено время, прошедшее с момента достижения условий для остановки двигателя. В одном примере выбранные условия работы могут включать в себя (без ограничения перечисленным) нулевую скорость транспортного средства, отсутствие нажатия педали акселератора и активацию педали тормоза. Кривая 502 обозначает взаимосвязь между временем, прошедшим с момента достижения условий для остановки двигателя, и уровнем потерь в экономии топлива. Таким образом, уровень потерь в экономии топлива возрастает вместе со временем, прошедшим с момента достижения условий для остановки двигателя.
Функция оптимальности на Фиг.5A построена с привязкой ко времени, прошедшему с момента достижения условий для остановки двигателя. Затем функция оптимальности выдает значение, представляющее собой потери в экономии топлива. Значение может быть сопоставлено с предварительно заданным значением. Если текущее значение выше предварительно заданного значения, то адаптированная задержка остановки двигателя может быть уменьшена. С другой стороны, в случае прерывания процедуры остановки двигателя адаптированная задержка остановки двигателя может быть увеличена на предварительно заданную величину. Таким образом, функция оптимальности является основой для регулировки задержки остановки двигателя.
На Фиг.5B представлены два примера функций оптимальности. Первая функция 504 оптимальности выражает уровень неудобства водителя, связанный с нажатием педали акселератора до перезапуска двигателя. Вторая функция 506 оптимальности выражает уровень неудобства водителя, связанный с перезапуском двигателя до нажатия педали акселератора. По оси Y отложен уровень неудобства водителя, который может быть определен эмпирическим путем, и который возрастает в направлении стрелки на оси Y. Ось X обозначает время, прошедшее с момента остановки двигателя.
Функция 504 оптимальности индексирована с привязкой ко времени, прошедшему с момента остановки двигателя. Затем функция оптимальности выдает значение, представляющее собой уровень неудобства водителя. Значение может быть сопоставлено с предварительно заданным значением. Если текущее значение выше предварительно заданного значения, адаптированная задержка остановки двигателя может быть уменьшена. Функция 506 оптимальности может быть построена аналогичным образом.
На Фиг.6 показан пример блочной диаграммы системы остановки и запуска двигателя транспортного средства. Блок 602 управления запуском/остановкой двигателя принимает входные сигналы, включая (без ограничения) скорость транспортного средства, скорость вращения двигателя, положение педали тормоза, положение педали акселератора, температуру двигателя, условия движения и дорожные условия. Блок 602 определяет наличие условий автоматической остановки и запуска двигателя. Например, блок 602 может принять решение о необходимости выполнения автоматической остановки двигателя, когда скорость транспортного средства равна нулю, педаль тормоза нажата, а педаль акселератора не нажата. Блок управления запуском/остановкой двигателя может принять решение о необходимости выполнения автоматического запуска двигателя, когда педаль тормоза отпущена после автоматической остановки двигателя. Блок 602 может определять, когда нужно остановить и когда нужно запустить двигатель, основываясь на комбинационной логике или иных известных способах принятия решения.
Блок 602 управления запуском/остановкой двигателя также получает скорректированные критерии остановки и запуска двигателя от адаптивного регулировочного алгоритма 606. Скорректированные критерии остановки и запуска двигателя могут быть использованы в рамках комбинационной логики блока 602 для определения того, нужно ли остановить или запустить двигатель. Например, скорректированные критерии остановки двигателя могут включать в себя задержку остановки двигателя, используемую в качестве основы для определения того, как долго двигатель будет работать на холостом ходу после выполнения выбранных условий остановки двигателя. После того как двигатель проработает на холостом ходу после выполнения выбранных условий остановки двигателя в течение времени, равного задержке остановки двигателя, двигатель будет остановлен. Таким образом, адаптивный алгоритм регулировки работает с помощью блока управления запуском/остановкой двигателя для определения того, когда двигатель должен быть остановлен и запущен.
Команды на остановку и запуск двигателя для функций 604 оптимальности/полезности выдает блок 602 управления запуском/остановкой двигателя. В некоторых примерах функции оптимальности/полезности могут быть индексированы с привязкой к данным от устройств ввода системы. Функции 604 оптимальности/полезности могут включать в себя функции, описанные со ссылкой на Фиг.5A и 5B, а также другие функции оптимальности. Функции 604 оптимальности/полезности позволяют получить выходное значение, с помощью которого адаптивный алгоритм регулировки корректирует критерии остановки и запуска. Выходное значение функции оптимальности/полезности может быть умножено или прибавлено к значению критериев остановки и запуска двигателя в адаптивном алгоритме регулировки. В другом варианте адаптивный алгоритм регулировки может выполнить предварительно заданную корректировку критериев остановки и запуска двигателя на основании выходного значения функции 604 оптимальности/полезности.
На Фиг.7 представлен способ 700, который позволяет определить, когда нужно автоматически остановить и/или запустить двигатель. Способ 700 может быть сохранен на постоянном запоминающем устройстве в виде выполняемых инструкций в системе на Фиг.1 и 2. Способ 700 может также содержать последовательности операций, представленные на Фиг.3 и 4.
На этапе 702 способ 700 предусматривает определение условий работы транспортного средства. Условия работы транспортного средства могут включать в себя, без ограничения, скорость вращения двигателя, положение педали акселератора, положение педали тормоза, скорость транспортного средства, температуру двигателя и условия дорожного покрытия. После определения условий работы транспортного средства способ 700 переходит к этапу 704.
На этапе 704 способ 700 предусматривает определение, было ли остановлено транспортное средство. Когда скорость вращения колес транспортного средства равна нулю, оно считается остановленным. В альтернативных примерах способ 700 может предусматривать определение, замедляется ли транспортное средство или нет. Если в способе 700 было определено, что транспортное средство остановлено или, в качестве альтернативы, замедляется, то ответ будет положительным, способ 700 переходит к этапу 708. В противном случае ответ будет отрицательным, способ 700 переходит к этапу 706.
На этапе 706 способ 700 предусматривает сброс таймера остановки транспортного средства и/или таймера замедления транспортного средства на нулевое значение. Таймер остановки транспортного средства измеряет время, в течение которого скорость транспортного средства равна нулю. Таймер замедления транспортного средства измеряет время, в течение которого скорость транспортного средства уменьшается. Сброс значений таймера остановки транспортного средства и/или таймера замедления транспортного средства позволяет определить точное количество времени, в течение которого транспортное средство стоит и/или замедляется.
На этапе 708 способ 700 предусматривает увеличение показаний таймера остановки транспортного средства и/или таймера замедления транспортного средства по мере увеличения времени, прошедшего после остановки транспортного средства и/или начала замедления транспортного средства. Таким образом, может быть определено время, в течение которого транспортное средство стоит и/или замедляется. После того, как показания таймера остановки транспортного средства и/или таймера замедления транспортного средства были набраны, способ 700 переходит к этапу 710.
На этапе 710 способ 700 предусматривает определение выполнения условий остановки двигателя. Выбранные условия могут включать в себя, без ограничения, скорость вращения двигателя, скорость транспортного средства, положение педали тормоза, положение педали акселератора, температуру двигателя и дорожные условия. Кроме того, выбранные условия, при которых двигатель может быть остановлен, могут быть разными в зависимости от условий движения. При выполнении выбранных условий остановки двигателя ответ будет положительным, способ 700 переходит к этапу 714. В противном случае ответ будет отрицательным, способ 700 переходит к этапу 712.
На этапе 712 способ 700 предусматривает сброс флага выключения двигателя. Флаг или переменная выключения двигателя является входным значением, используемым для определения на этапе 726 того, нужно ли остановить двигатель. Если флаг выключения двигателя сброшен, вращение двигателя не будет автоматически остановлено. После сброса флага выключения двигателя способ 700 переходит к этапу 716.
На этапе 714 способ 700 предусматривает установку или подтверждение установки флага или переменной выключения двигателя. На этапе 730 вращение двигателя может быть остановлено после установки флага выключения двигателя, после чего способ 700 переходит к этапу 716.
На этапе 716 способ 700 предусматривает определение того, превышает ли давление тормозной системы транспортного средства или положение педали тормоза первый пороговый уровень. Если да, то способ 700 переходит к этапу 718. В противном случае способ 700 переходит к этапу 720.
На этапе 718 способ 700 предусматривает установку или подтверждение установки флага или переменной отключения тормоза. На этапе 730 вращение двигателя может быть остановлено после установки флага отключения тормоза. Способ 700 переходит к этапу 724 после установки переменной отключения тормоза.
На этапе 720 способ 700 предусматривает определение того, ниже ли давление тормоза транспортного средства или положение педали тормоза, чем второй пороговый уровень, где второй пороговый уровень ниже первого порогового уровня. Если да, то способ 700 переходит к этапу 722. В противном случае способ 700 переходит к этапу 724.
На этапе 722 способ 700 предусматривает сброс или обнуление флага отключения тормоза. Таким образом, флаг отключения тормоза может быть сброшен при отпускании педали тормоза. После обнуления переменной отключения тормоза способ 700 переходит к этапу 724.
На этапе 724 способ 700 предусматривает отслеживание времени, в течение которого двигатель работает на холостом ходу. В одном примере время, в течение которого двигатель работает на холостом ходу, измеряют с помощью таймера, при этом таймер сбрасывается на ноль каждый раз, когда двигатель работает на скорости, отличной от скорости холостого хода. Значение таймера растет вместе со временем работы двигателя на холостом ходу. После отслеживания времени работы двигателя на холостом ходу способ 700 переходит к этапу 726.
На этапе 726 способ 700 предусматривает определение выполнения комбинации условий для остановки двигателя. Комбинация условий определяется путем оценки показаний таймера остановки транспортного средства, флага выключения двигателя и флага отключения тормоза. В других примерах наличие условий для остановки двигателя могут определять с помощью дополнительных или иных условий. Если в способе 700 было обнаружено, что условия остановки двигателя выполнены, то способ 700 переходит к этапу 730. В противном случае ответ будет отрицательным, способ переходит к этапу 728.
На этапе 728 в способ 700 предусматривает работу двигателя. Работа двигателя включает в себя вращение двигателя, а также подачу искры и топлива в двигатель. После этого способ 700 завершается.
На этапе 730 способ 700 предусматривает остановку двигателя. Двигатель может быть остановлен с помощью прекращения подачи топлива и/или искры в двигатель. После остановки двигателя способ 700 переходит к этапу 732.
На этапе 732 способ 700 предусматривает мониторинг входных данных транспортного средства, когда двигатель остановлен. Входные данные транспортного средства могут включать в себя положение педали тормоза, температуру двигателя, положение педали акселератора и иные условия. После контроля условий транспортного средства способ 700 переходит к этапу 734.
На этапе 734 способ 700 предусматривает определение выполнения условий для автоматического перезапуска двигателя. Перезапуск двигателя может быть затребован путем отпускания педали тормоза и/или нажатия педали акселератора, а также смены состояния других условий транспортного средства. Если в способе 700 было определено, что автоматический перезапуск двигателя был запрошен, ответ будет положительным, способ 700 переходит к этапу 736. В противном случае ответ будет отрицательным, а способ 700 возвращается к этапу 732.
На этапе 736 способ 700 предусматривает определение того, нажата ли педаль акселератора. Педаль акселератора считается нажатой, если положение педали акселератора отличается от исходного положения. Если в способе 700 было определено, что педаль акселератора нажата, ответ будет положительным, способ 700 переходит к этапу 738. В противном случае ответ будет отрицательным, способ 700 переходит к этапу 742.
На этапе 738 способ 700 предусматривает мониторинг скорости вращения двигателя во время разгона (например, с момента, когда скорость вращения двигателя была равна нулю, и до момента достижения скорости холостого хода в первый раз после остановки двигателя). Скорость вращения двигателя может быть проконтролирована в течение заранее определенного периода времени после достижения значения скорости холостого хода во время запуска двигателя. Контроль скорости вращения двигателя может включать в себя сравнение фактической скорости вращения двигателя с нужной траекторией изменения скорости вращения двигателя, которая сохранена в памяти контроллера. Могут быть определены количество раз, когда фактическая скорость вращения двигателя становится выше или ниже нужной скорости вращения двигателя, и время, в течение которого фактическая скорость вращения двигателя выше или ниже нужной скорости вращения двигателя. После контроля скорости вращения двигателя способ 700 переходит к этапу 740.
На этапе 740 скорость вращения двигателя является входным значением для функции оптимальности по способу 700, используемым для определения необходимости регулировки передаточной функции педали акселератора во время разгона двигателя. В некоторых примерах во время работы двигателя может быть использовано две передаточных функции педали акселератора. Первая функция будет использована во время разгона двигателя, а вторая - после разгона двигателя. Передаточная функция педали акселератора позволяет получить выходное значение на основании положения педали акселератора, данное значение влияет на нужный крутящий момент двигателя. Если водитель значительно меняет положение педали во время разгона двигателя, из-за запроса водителя запуск транспортного средства может оказаться не таким плавным, как хотелось бы. Функция оптимальности для педали акселератора является основанием для определения того, изменяется ли, и насколько передаточная функция педали акселератора. Например, если обнаружено, что скорость вращения двигателя выше нужной скорости вращения двигателя, может быть принято решение об уменьшении выходного значения передаточной функции педали акселератора. Аналогичным образом, если определено, что водитель нажимает и отпускает педаль акселератора во время разгона двигателя, то может быть принято решение о необходимости уменьшения выходного значения передаточной функции педали акселератора, для того чтобы избежать возникновения подобных условий. В одном примере функция оптимальности для педали акселератора выдает переменную для того, чтобы обозначить изменение передаточной функции педали акселератора. В других примерах значение передаточной функции педали акселератора может быть умножено или увеличено на выходное значение функции оптимальности. После того, как функция перемещения педали акселератора могла быть изменена, способ 700 переходит к этапу 742.
На этапе 742 способ 700 предусматривает использование функции оптимальности к условиям остановки двигателя. Например, функции оптимальности могут быть применены к времени работы двигателя на холостом ходу, времени, в течение которого двигатель был остановлен, нажатию педали акселератора, нажатию педали акселератора после запуска двигателя и другим условиям. После применения условий остановки двигателя к функциям оптимальности способ 700 переходит к этапу 744.
На этапе 744 способ 700 предусматривает обновление критерия выключения двигателя в зависимости от выходного значения функций оптимальности. Критерий выключения может быть изменен на предварительно заданное значение или при помощи выходного значения функции оптимальности, полученного на этапе 742. Также на основании выходного значения функции оптимальности может быть отрегулирована только часть передаточной функции или критериев, которые могут принимать более одного значения. Например, если задержка остановки двигателя изменяется в зависимости от температуры двигателя, то значение, представляющее собой время задержки при текущей температуре двигателя, может быть отрегулировано, при этом значения задержки остановки двигателя для других температур могут остаться прежними. После обновления критерия остановки двигателя способ 700 переходит к этапу 728.
Таким образом, способ на Фиг.7 предлагает способ эксплуатации двигателя, включающий в себя: автоматическую остановку двигателя при наличии одного или более условий работы транспортного средства, соответствующих критериям остановки двигателя; регулировку критериев остановки двигателя в зависимости от условий остановки двигателя, рассчитанных по одной или более функциям оптимальности. При этом одна или более функций оптимальности представляет собой функцию оптимальности, которая оценивает степень потерь в экономии топлива в зависимости от времени, прошедшего с момента выполнения критерия остановки двигателя. Способ также включает в себя ситуацию, когда одна или более функций оптимальности представляет собой функцию оптимальности, которая оценивает нажатие водителем педали акселератора между моментом, когда двигатель остановлен, и моментом, когда двигатель достигает порогового значения скорости, с учетом времени, в течение которого двигатель остановлен. Способ также включает в себя ситуацию, когда пороговым значением является скорость холостого хода.
В некоторых примерах способ включает в себя ситуацию, когда одна или более функций оптимальности представляют собой функцию оптимальности, которая оценивает первое нажатие водителя на педаль акселератора после остановки двигателя и после достижения предварительно заданной скорости с учетом времени, прошедшего после остановки двигателя. Способ также включает в себя остановку двигателя в ответ на регулировку критерия остановки двигателя. Способ также включает в себя возможность регулировки водителем одной или более функций оптимальности с помощью устройства ввода.
В другом примере способ на Фиг.7 предусматривает эксплуатацию двигателя, включающую в себя: автоматическую остановку двигателя при соответствии одного или более условий работы транспортного средства критериям остановки двигателя; регулировку критерия остановки двигателя в зависимости от оценки условий остановки двигателя с помощью одной или более функций оптимальности остановки двигателя; автоматический перезапуск двигателя; регулировку первой передаточной функции исполнительного механизма, используемой во время разгона двигателя в зависимости от оценки условий запуска с помощью функции оптимальности запуска двигателя. В способе первая передаточная функция исполнительного механизма представляет собой передаточную функцию педали акселератора.
Способ с Фиг.7 также включает в себя применение второй передаточной функции исполнительного механизма вместо первой передаточной функции исполнительного механизма после разгона двигателя. Регулировка первой передаточной функции исполнительного механизма включает в себя уменьшение коэффициента усиления в первой передаточной функции исполнительного механизма, если скорость вращения двигателя выше траектории порогового значения во время разгона двигателя. Способ включает в себя регулировку первой передаточной функции исполнительного механизма, которая подразумевает увеличение коэффициента усиления первой передаточной функции исполнительного механизма, если скорость вращения двигателя ниже траектории порогового значения во время разгона двигателя. Способ также включает в себя оценку крутящего момента с учетом уровня неудобства водителя с помощью функции оптимальности запуска двигателя. В способе крутящий момент представляет собой крутящий момент колес или крутящий момент двигателя. С помощью функции оптимальности запуска двигателя рассчитывают отклонение скорости вращения двигателя от нужной скорости вращения двигателя с учетом уровня неудобства водителя.
Как должно быть понятно специалистам в данной области техники, описанные со ссылкой на Фиг.7 процедуры могут представлять собой один или несколько принципов обработки, такие как принцип событийного управления, управления прерываниями, многозадачный режим, многопоточный режим, и прочие. По существу, различные действия, операции или функции могут быть выполнены в указанной последовательности, параллельно, или, в некоторых случаях, пропущены. Аналогично, порядок действий не является обязательным, чтобы достичь характеристик и эффекта описанных примерных вариантов выполнения, он представлен для объяснения иллюстраций и описания. Одно или более проиллюстрированных действий или функций может быть повторено в зависимости от конкретной используемой стратегии.
Специалистам в данной области понятно, что допускаются различные изменения и модификации изобретения без выхода за рамки его сущности. Например, описанная выше технология может применяться к двигателям I2, I3, I4, I5, V6, V8, V10, V12 и V16, а также двигателям, работающим на природном газе, газолине, дизельном топливе или альтернативном топливе.
Система сидений с багажной полкой
Определение экономного маршрута транспортного средства
Способ управления двигателем (варианты)
Передний модуль для автомобиля
Поиск и выявление объектов инфраструктуры и прокладка маршрута
Способ поэтапного формования детали с вогнутыми и выпуклыми поверхностями
Система кондиционирования с одним расширительным клапаном
Система для перевозки грузов
Система и способ автоматического хранения и извлечения информации о чрезвычайной ситуации
Транспортное средство с системой идентификации
Система сидений с багажной полкой
Определение экономного маршрута транспортного средства
Способ управления двигателем (варианты)
Передний модуль для автомобиля
Поиск и выявление объектов инфраструктуры и прокладка маршрута
Способ поэтапного формования детали с вогнутыми и выпуклыми поверхностями
Система кондиционирования с одним расширительным клапаном
Система для перевозки грузов
Система и способ автоматического хранения и извлечения информации о чрезвычайной ситуации
Транспортное средство с системой идентификации

